Allradantrieb
Der Allradantrieb (umgangssprachlich auch kurz Allrad genannt) ist eine Antriebsart von Fahrzeugen, bei der die Antriebskraft – im Gegensatz zum Front- oder Hinterradantrieb – an alle bodenberührenden Räder geleitet wird. Weitere und teilweise weltweit gebräuchliche Bezeichnungen für den Allradantrieb sind AWD (All Wheel Drive) sowie bezogen auf vierrädrige Fahrzeuge 4×4 (englisch Four by Four) und 4WD (Four Wheel Drive). In den Vereinigten Staaten gab es (1909–2009) die Four Wheel Drive Automobile Company (FWD), als Antriebsschema wird die Abkürzung „FWD“ jedoch als Front-Wheel Drive (deutsch Vorderradantrieb) verstanden.

.jpg.webp)
Allradantrieb wird bei praktisch allen Arten von Landfahrzeugen eingesetzt, die für den Einsatz abseits befestigter Straßen konzipiert sind. Dazu gehören unter anderem Pkw, Lkw, Baumaschinen, landwirtschaftliche Maschinen und Quads. Bei Pkw wurde der Allradantrieb lange Zeit fast ausschließlich zur Gewährleistung der Geländegängigkeit von Geländewagen genutzt: Seit Mitte der 1980er Jahre wird er auch zur Verbesserung der Fahrdynamik im Grenzbereich genutzt. Unabhängig davon wird der Allradantrieb in Pkw auch dort vermarktet, wo der technische Vorteil nicht benötigt wird (siehe SUV).
Allgemeines


Ein Allradantrieb wird in Fahrzeugen aus verschiedenen Gründen eingesetzt. Früher wie heute dient er zur Erhöhung der Traktion und um eine gewisse Geländegängigkeit überhaupt erst zu ermöglichen, doch kam vor einigen Jahren auch der Einsatz auf der Straße zur Verbesserung des Fahrverhaltens hinzu. Durch den Antrieb aller bodenberührenden Räder wird das ganze Fahrzeuggewicht genutzt, die Antriebskraft über die Haftreibung auf den Boden zu übertragen und so der Schlupf jedes einzelnen Rades verringert. Allradantrieb wird häufig in Fahrzeugen verwendet, die für das Fahren in schwierigem Gelände oder auf unbefestigten Wegen konzipiert wurden.
Außer in Geländewagen wird der Allradantrieb auch in Straßenfahrzeugen eingesetzt. Hier bietet der Allradantrieb durch die erhöhte Traktion die Möglichkeit, mehr Motorleistung auf die Straße zu übertragen und den Vorteil einer verbesserten Fahrstabilität. Durch einen geeigneten Aufbau und die Verteilung der Antriebsmomente zwischen den Achsen wird häufig dem allradgetriebenen Fahrzeug ein ähnliches Verhalten diktiert wie dem einachsig angetriebenen Wagen. Es ist so möglich, ein heckdominantes Fahrverhalten (Übersteuern im Grenzbereich), ein neutrales Verhalten oder ein frontdominantes Fahrverhalten (Untersteuern im Grenzbereich) zu realisieren.
Allgemein wird auch der Grenzbereich leichter beherrschbar gegenüber Fahrzeugen mit Front- oder Heckantrieb. Nahe an den physikalischen Grenzen, typischerweise dem sehr schnellen Durchfahren einer Kurve, kann ein Fahrzeug mit Allradantrieb auch ohne ausreichende Erfahrung leichter zu beherrschen sein als ein Fahrzeug mit konventionellem Antrieb, da es relativ neutrale Fahreigenschaften hat. Das bedeutet, dass das Fahrzeug weder über- noch untersteuert. Mit der zunehmenden Verbreitung von Fahrdynamikregelungen (ESP) verringert sich dieser Vorteil.
Fahrzeuge mit Allradantrieb haben meist Front- oder Heckmotor, da er in Mittelmotor-Fahrzeugen (hauptsächlich Sport- oder auch Rennwagen) wegen des begrenzten Bauraums schwierig zu realisieren und somit kostspielig ist. Fahrzeuge mit Allradantrieb und Mittelmotor sind teure Supersportwagen wie die Lamborghini-Modelle Huracán und Aventador, der Bugatti Veyron und der Audi R8. Auch bei einem quer eingebauten Frontmotor ist ein Allradantrieb schwer zu verwirklichen, aber nicht weil der Motor im Weg ist, sondern weil das Antriebsmoment umgelenkt werden muss.
Nachteile des Allradantriebs sind das durch ihn selbst bedingte erhöhte Fahrzeuggewicht, die höheren Produktionskosten, ein gewisser Mehrverbrauch und gelegentlich kleinere Kofferräume. Ferner kann der Allradantrieb, gerade auf nassen, vereisten oder verschneiten Fahrbahnen, schnell ein falsches Sicherheitsgefühl suggerieren. Mit Allradantrieb hat das Fahrzeug zwar eine bessere Traktion, aber zum Bremsen verwenden alle Fahrzeuge, ob mit oder ohne Allradantrieb, immer alle Räder, so dass Allradfahrzeuge keine kürzeren Bremswege haben. Außerdem reduziert eine Übertragung von Antriebskraft über die gelenkten Räder die verbleibende Haftung für Seitenführungskräfte, was im Grenzbereich ein früheres Ausbrechen aus der Kurve bewirken kann.
Geschichte des Allradantriebs in der Übersicht
Anfänge und Meilensteine





Nach heutigem Kenntnisstand geht der Ursprung allradangetriebener Fahrzeuge auf das Jahr 1827 zurück, als John Hill und Timothy Burstall in England ein dampfgetriebenes Transportfuhrwerk mit Heckantrieb und einem über eine – zur damaligen Zeit noch unübliche – Kardanwelle zuschaltbaren Vorderachsantrieb konstruierten. Weitere Versuche bei dampfgetriebenen Gefährten anderer Konstrukteure folgten, doch konnte sich der Allradantrieb hier wegen technischer Probleme nicht durchsetzen.
- 1895 baute die Charles F. Caffrey Carriage Company in Camden (New Jersey, Vereinigte Staaten), einen Dampfwagen mit vier kleinen Dampfmaschinen zu je 3 PS (nach damaliger Berechnungsmethode), die je ein Rad antrieben. Jedes konnte beliebig mit einem Hebel separat angesteuert werden, sodass zwischen 3 und 12 PS zur Verfügung standen; der Caffrey Steam konnte also sowohl mit Front- als auch mit Allradantrieb gefahren werden.[1][2]
- 1900 stellte Ferdinand Porsche das als Lohner-Porsche bekannte Elektromobil mit Allradantrieb vor.[3] Es war mit Radnaben-Elektromotoren an allen vier Rädern ausgestattet.
- 1903 wurde in den Niederlanden von den zwei Brüdern Jacobus und Hendrik-Jan Spijker mit dem Spyker 60 H.P. das erste Verbrennungsmotor-Automobil mit Allradantrieb als Rennwagen für den Automobilsport konstruiert.
- 1907 baute die Daimler-Motoren-Gesellschaft (DMG) im Auftrag des Reichskolonialamtes ein allradgetriebenes Fahrzeug, das in der Kolonie Deutsch-Südwestafrika durch die Landespolizei eingesetzt wurde. Dieser Wagen wurde nicht nur über alle vier Räder angetrieben, sondern auch über die vier Räder gelenkt. Erster prominenter Passagier war der Staatssekretär des Reichskolonialamtes Bernhard Dernburg, auf dessen Reise durch das Schutzgebiet. Im Zusammenhang mit dem 100-jährigen Jubiläum des Wagens wurde er von der Daimler AG als Dernburg-Wagen bezeichnet.
- 1908 bauten Otto Zachow und William Besserdich einen Prototyp mit Dampfantrieb und ihrem patentierten Vorderradantrieb. Daraus wurden benzingetriebene Personenwagen (1910–1912) und vor allem Nutzfahrzeuge (seit 1911) mit Allradantrieb entwickelt und als F.W.D. verkauft.[4]
- 1915 begannen Renault und Latil, die ersten Zugmaschinen mit Allradantrieb zu bauen.
- 1934 wurden von Mitsubishi vier Prototypen eines Cabriolets mit Allradantrieb unter der Bezeichnung PX33 gebaut. Auch eine Diesel-Variante wurde erprobt. Das Projekt wurde jedoch gestoppt.
- 1935 stellte die Büssing AG den ersten deutschen Lkw mit Allradantrieb vor.
- Ebenfalls 1935 wurde mit dem Tempo G1200 das erste Fahrzeug mit Allradantrieb vorgestellt, bei dem jede Antriebsachse durch einen eigenen Verbrennungsmotor angetrieben wurde.
- 1940 stellte American Bantam bei einer Ausschreibung eines Geländewagens für militärische Zwecke einen ersten allradgetriebenen Prototyp vor. Ein weiter entwickeltes Modell wurde ab 1941 für die US-Streitkräfte von Willys-Overland unter dem Namen Willys MB und von Ford als Ford GPW in Serie gefertigt. 1945 folgte eine auf diesem Fahrzeug basierende zivile Variante mit der Modellbezeichnung Jeep CJ-2A und 1949 der Kombi Willys Jeep Utility Wagon mit Allradantrieb.
- 1948[5] wurde der Unimog vorgestellt, ein vielseitig einsetzbares äußerst geländegängiges Nutzfahrzeug, das Hinterradantrieb mit zuschaltbarem Vorderradantrieb hat.
- 1966 begann die Kleinserienproduktion (320 Stück wurden hergestellt) des ersten Straßenfahrzeugs mit permanentem Allradantrieb – des Jensen FF.
- 1972 stellte Subaru den Leone 4WD Station Wagon als erstes Großserien-Straßenfahrzeug mit zuschaltbarem Allradantrieb vor.
- 1979 kam der AMC Eagle auf den Markt, ein Großserien-Straßenfahrzeug mit permanentem Allradantrieb.
- 1980 präsentierte Audi auf dem Genfer Auto-Salon mit dem quattro sein erstes Großserien-Straßenfahrzeug (11.452 Stück wurden insgesamt produziert) mit permanentem Allradantrieb.
Aktuelle Situation
Neben den Geländewagen sind auch nicht geländegängige Fahrzeugtypen, darunter sogar Sportwagen aus Gründen der erhöhten Traktion und Fahrsicherheit, oder auch wegen besserer Vermarktungsmöglichkeiten, mit einem Allradantrieb ausgestattet. Am häufigsten anzutreffen ist der Allradantrieb jedoch bei Geländewagen, SUVs und Lkw, sowie bei Traktoren.
Bei Straßenfahrzeugen erfreut sich der Allradantrieb besonders in der oberen Mittelklasse immer größerer Beliebtheit. Bei einigen Fahrzeugherstellern wird er eingesetzt, um die Nachteile des Frontantriebs der Serienmodelle bei immer stärker werdenden Motorleistungen zu kompensieren. Auch wenn in dieser Fahrzeugklasse der Hinterradantrieb mit über 60 Prozent der zugelassenen Fahrzeuge vorherrschend ist, werden zunehmend auch diese Modelle mit Allradantrieb ausgestattet. Ein Beispiel hierfür ist die E-Klasse der Baureihe W211. Von allen mit Allradantrieb ausgestatteten Fahrzeugen von Daimler unter der Marke Mercedes-Benz liegt ihr Anteil bei über zehn Prozent (Stand 2005).
Der Anteil der mit Allradantrieb ausgestatteten Fahrzeuge dieser Fahrzeugklasse stieg insgesamt von 2002 bis 2004 von sieben auf zwölf Prozent.
Einige Großserienmodelle (z. B. VW Golf oder Caddy, Fiat Panda, Renault Kangoo) werden ebenfalls in einer Variante mit Allradantrieb (und teils leicht erhöhter Bodenfreiheit) angeboten. Diese Fahrzeuge dienen zum Beispiel als Firmenfahrzeuge bei häufigen Einsätzen auf schlechten Wegstrecken wie Feld- und Waldwegen.
In den letzten Jahren ist der Allradantrieb durch eine elektronische Steuerung ergänzt worden, die schlupfabhängig die Kraftverteilung auf die Räder individuell regelt, z. B. bei der vierten Generation der Haldex-Kupplung, die im Saab 9-3 XWD eingeführt wurde.
Im Rahmen alternative Antriebskonzepte wie in Hybridfahrzeugen werden z. B. die Vorderräder herkömmlich mit dem Verbrennungsmotor und die Hinterräder mit Elektromotoren angetrieben. Hieraus ist bei entsprechender Ansteuerung ebenfalls ein Allradantrieb darstellbar.
Technik
Ein Antrieb

Die derzeit häufigste Variante besteht aus einem einzelnen Antrieb (meist Verbrennungsmotor), dessen Leistung auf mehrere Achsen und Räder verteilt werden soll. Für eine grundsätzliche Betrachtung der technischen Grundlagen reicht es zunächst aus, sich auf Fahrzeuge zu beschränken, welche die Antriebsleistung auf zwei Achsen aufteilen. Andere Konfigurationen lassen sich aus diesen Grundprinzipien ableiten. Allradantriebe kann man aus technischer Sicht in zwei Grundtypen einteilen:
- Differenzialgesteuerte oder permanente Allradantriebe haben ein Zentraldifferenzial (auch: Längsdifferenzial, Mittendifferenzial), das die Antriebsleistung auf beide Achsen aufteilt und manchmal als Sperrdifferenzial ausgeführt ist. Das Zentraldifferenzial ist ein Planetengetriebe (gelegentlich auch wie ein Achsdifferenzial mit Kegelrädern ausgeführt, da dies ein spezielles Planetengetriebe mit einer 50:50-Drehmoment-Aufteilung ist), das aus Stirnrädern, Kegelrädern, Schnecke- und Schneckenrad oder Ritzeln und Kronenrädern aufgebaut ist. Alternativ können auch Differenziale ohne Zahnräder (wie zum Beispiel Gleitsteindifferenziale[6]) verwendet werden.
- Kupplungsgesteuerte Allradantriebe werden auch durch Begriffe wie zuschaltbar, Hang-On oder On-Demand gekennzeichnet. Bei diesen Systemen wird eine Achse permanent angetrieben, die andere Achse wird nur unter bestimmten Voraussetzungen über die Kupplung mit Antriebsleistung versorgt. Die Kupplung selbst kann eine einfache Klauenkupplung (manuelle Zuschaltung), eine Visco-Kupplung, eine Fliehkraftkupplung oder eine elektronisch gesteuerte Reiblamellenkupplung sein. Der Vorteil kupplungsgesteuerter Allradantriebe liegt vor allem in den niedrigeren Systemkosten und in der Möglichkeit das Fahrzeug mit einem markentypischen Fahrverhalten als Frontantrieb oder als Heckantrieb im Normalbetrieb auszulegen und erst bei Bedarf auf den Allradantrieb zurückzugreifen.
Ein Allradantrieb erfordert beim Fahrzeug zwei Achsdifferenziale, die beim permanenten Allradantrieb ihrerseits wieder mit einem Längsdifferenzial verbunden sind. Vor allem beim Lkw sind zusätzlich noch Sperren des hinteren Quer- oder des Längsdifferenzials möglich.
Differenzialgesteuerter (permanenter) Allradantrieb
Bei Fahrzeugen mit permanentem Allradantrieb wird die Motorleistung ständig auf alle vier Räder übertragen und durch die Differenziale wird der vollständige Drehzahlausgleich ohne Leistungsverluste gewährleistet. Um Verspannungen im Antriebsstrang zu vermeiden, wird ein zusätzliches Zentraldifferenzial zwischen Vorder- und Hinterachse eingebaut. Der Nachteil hierbei ist jedoch, dass bei fehlender Bodenhaftung eines einzelnen Rades oder einer Achse das übertragbare Antriebsmoment durch dieses Rad oder diese Achse begrenzt wird, wodurch ein Fahrzeug im Extremfall nicht mehr aus eigener Kraft bewegt werden kann. Aus diesem Grund wird bei Fahrzeugen mit permanentem Allradantrieb häufig entweder das Zentraldifferenzial als Sperrdifferenzial ausgeführt (beispielsweise die Torsen-Differenziale in früheren Audi-quattro-Modellen mit längseingebautem Motor), oder gibt elektronische Traktionshilfen wie Antriebsschlupfregelung (ASR). In Geländewagen, wie zum Beispiel dem Land Rover Defender steht dagegen ein manuell sperrbares Mittendifferenzial zur Verfügung, das je nach Untergrundbeschaffenheit vom Fahrer gesperrt werden kann.
Durch die Bauart des Zentraldifferenzials wird bestimmt, ob das Antriebsmoment gleichmäßig (50:50) oder auch ungleichmäßig auf beide Achsen aufgeteilt wird. Die Verteilung ist für das Fahrverhalten maßgeblich. Da an Steigungen und beim Beschleunigen durch die dynamische Achslastverschiebung zusätzlich Gewicht auf die Hinterachse verlagert wird, ist es üblich, auch beim Antriebsmoment einen höheren Anteil auf die Hinterachse zu übertragen. Daher werden in vielen Fahrzeugen die Drehmoment-Aufteilungen zwischen Vorderachse und Hinterachse von 45:55 (V:H) bis 33:67 gewählt. Diese Verteilung ist fest. Ist aber das Zentraldifferenzial sperrbar, kann die Leistung nach der an den Achsen gegebenen verteilt werden. Auch Zentraldifferenziale mit elektronischer Reiblamellenkupplung lassen Kraftverteilungen bis 100 : 0 und 0 : 100 zu.
Kupplungsgesteuerter (zuschaltbarer) Allradantrieb
Bei Fahrzeugen mit zuschaltbarem Allradantrieb wird bei normalen Fahrbedingungen nur eine Achse angetrieben. Erst bei glatter Fahrbahn oder auf rutschigem Untergrund wird der Antrieb der zweiten Achse zugeschaltet. Dadurch wird die Traktion des Fahrzeugs erhöht.
Für das Zuschalten der zweiten Antriebsachse gibt es verschiedene Bauarten:
- Im einfachsten Falle wird eine Klauenkupplung an der Antriebswelle geschlossen
- Ein sperrbarer Freilauf an der Radnabe verbindet die Antriebswelle mit dem Rad (dies erfordert bei manuell schaltbaren Naben, das Fahrzeug zu verlassen)
Durch den fehlenden Drehzahlausgleich der starren Verbindung kann es zu Verspannungen im Antriebsstrang und gelegentlichen Geräuschen beim Einparken kommen. Bei Kurvenfahrt folgen die Vorderräder einem größeren Radius und müssen sich schneller drehen als die Hinterräder, werden aber gezwungen, sich genauso schnell wie die Hinterräder zu drehen. Das führt – je nach Auslegung des Fahrwerks – zu reduziertem Übersteuern oder verstärktem Untersteuern. Dieses kostengünstig zu produzierende Allradantriebssystem wurde häufig in der Kleinwagenklasse verwendet. Als Beispiele hierfür seien der Fiat Panda 4×4 (der Jahre 1983–2003), Subaru Justy und Subaru Vivio sowie der Citroën AX 4×4 genannt.
Fahrzeuge mit zuschaltbarem Allradantrieb verbrauchen genauso viel Kraftstoff wie Fahrzeuge mit permanentem Allradantrieb, weil auch bei nicht angetriebener zweiter Achse sich deren Antriebsstrang mitdreht und deshalb Plansch- und Reibungsverluste auftreten. Nur wenn zusätzlich Freilaufnaben eingebaut sind, können diese Verluste vermieden werden.
Der zuschaltbare Allradantrieb wird heute fast ausschließlich in Fahrzeugen angeboten, die auf normalen Straßen bewegt werden und zusätzlich bedingt geländetauglich sein sollen (SUVs). Wegen seiner technischen Einfachheit und Robustheit wird der zuschaltbare Allradantrieb bei Wagen verwendet, die unter rauen Bedingungen eingesetzt werden; so hatte zum Beispiel der Toyota Landcruiser J10 in Europa permanenten Allradantrieb mit Einzelradaufhängung vorn, in Afrika und arabischen Ländern jedoch zuschaltbaren Allradantrieb und Starrachsen. Der Toyota J7 und der 2008 vorgestellte Iveco Massif werden ausschließlich mit zuschaltbarem Allradantrieb gefertigt.
Bei automatischen Systemen gibt es im Wesentlichen zwei Arten:
- Passive Systeme bauen auf einer Kupplung auf, die in Abhängigkeit von der Drehzahldifferenz zwischen den Achsen das Drehmoment auf die zweite Achse umleiten. Die Kupplung kann eine Visco-Kupplung oder Fliehkraftkupplung sein. Teilweise sind diese Kupplungen in ihrem Übertragungsverhalten auch von außen beeinflussbar (geregelte Viscokupplung und Haldex-Kupplung).
- Die Ausnahme bei den Haldex-Systemen ist die „4Motion“ Technik der Volkswagen AG, dieser Antrieb ist als permanenter Allradantrieb konzipiert.
- Aktive Systeme basieren meist auf einer elektronisch gesteuerten Reiblamellenkupplung, die nicht mehr von Drehzahl- oder Drehmomentunterschieden, sondern von einem übergeordneten Fahrdynamikregler situationsabhängig gesteuert werden
Mischform
Eine Sonderstellung nehmen Systeme ein, die zwar nicht permanent sind, aber dennoch ein Zentraldifferenzial haben, das bei zugeschaltetem Allradantrieb die Verteilung der Antriebskraft übernimmt. Bei dieser Mischform ist der Allradantrieb differenzialgesteuert, kann jedoch mit Kupplungen auch ein- und ausgeschaltet werden. Diese Lösung wird wegen des hohen Aufwandes sehr selten verwendet.
Ein Beispiel für ein derartiges Fahrzeug ist der Mercedes W 124 4MATIC. Hier wird der Antrieb auf das Zentraldifferential geleitet. Um mit Hinterradantrieb zu fahren, wird das Zentraldifferenzial gesperrt und die Vorderachse weggeschaltet. Je nach Stellung der beiden Kupplungen (offen oder geschlossen) sind folgende Betriebsarten möglich: reiner Hinterradantrieb, Allradantrieb mit Längsausgleich, Allradantrieb mit Längssperre. Die elektronische Steuerung wertet die ABS-Daten aus und wählt die Antriebsart. Das ausgeklügelte 4MATIC-System wurde auch nach dem W 124 weiterhin von Mercedes angeboten„[citation needed]“, allerdings änderte man seine doch etwas aufwendige Technik für das Nachfolgemodell W 210.
Ein anderes Beispiel ist der IFA W50-LA. Hier wird im Normalfall nur die Hinterachse angetrieben. Der Fahrer kann jedoch auch andere Antriebsarten schalten. Geschaltet wird mit zwei Klauenkupplungen im Verteilergetriebe, angetrieben wird entweder direkt die Hinterachse (Hinterradantrieb) oder das Zentraldifferenzial (permanenter Allradantrieb mit Längsausgleich). Zusätzlich kann das Zentraldifferenzial gesperrt werden.
Ähnliche Funktionen bietet auch der Allradantrieb Super Select einiger Mitsubishi-Geländewagen, beispielsweise des Pajero. Der Fahrer kann zwischen reinem Hinterradantrieb, Allradantrieb über das Zentraldifferenzial mit Längsausgleich und zusätzlicher Visco-Sperre und Allradantrieb mit voll gesperrtem Längsdifferenzial wählen. Falls notwendig kann auch eine Geländeuntersetzung zugeschaltet werden.
Auch der Allradantrieb Select-Trac der Marke Jeep basiert auf einem ähnlichen Konzept.
Verbrennungsmotoren

Eine Sonderform des Allradantriebs stellt eine Variante dar, bei der jede Fahrzeugachse durch einen eigenen Motor angetrieben wird. Zu den Fahrzeugen, die mit dieser Antriebsart ausgestattet wurden, zählen zum Beispiel der Tempo G1200 (4000 produzierte Fahrzeuge) und der Citroën 2CV 4×4 „SAHARA“ (694 produzierte Exemplare). In den 1980ern experimentierte auch der österreichische Formel-V-Spezialist Kurt Bergmann, in Kooperation mit VW-Motorsport, mit dieser Sonderform des Allradantriebs (siehe: Allradantrieb im Automobilsport). Drei seiner Fahrzeuge vom Typ VW Golf wurden zwar beim berühmten Pikes-Peak-Bergrennen in den USA eingesetzt, doch die Fahrzeugart selbst gelangte nie in die VW-Produktion und auch die BiMotor-Entwicklung wurde von Volkswagen danach nicht mehr weiterverfolgt. Rund 20 Jahre später ist das Doppelmotor-Allrad-Konzept aber wieder einmal in Mode, wie der auf dem Audi TT basierende Bimoto von mtm Motorentechnik Mayer mit bis zu 1000 PS Leistung eindrücklich unter Beweis stellt. 1998 wurde auf dem Autosalon in Genf ein Bimoto-Fahrzeug der A-Klasse von Mercedes als sogenanntes Concept-CarZ präsentiert. Auch der 2003 vorgestellte Hoggar, ein Concept-Car bzw. eine Buggy-Studie von Peugeot mit Front-, Heck- oder Allradantrieb, gehört zur seltenen Spezies der Doppelmotor-Exoten.
Beim schweren sowjetischen Militärlastwagen ZIL-135 sorgten zwei V8-Benzinmotoren mit je sieben Litern Hubraum für Vortrieb. Nahezu einmalig ist, dass die Aufteilung der Antriebskraft nicht nach Achsen erfolgt, sondern je ein Motor die Räder der rechten beziehungsweise linken Fahrzeugseite antreibt. Dieses Antriebskonzept kam auch noch beim Experimentalfahrzeug ZIL-E167 zum Einsatz, hier jedoch nur bei sechs, statt wie beim ZIL-135 bei acht Rädern. Die hohe Geländegängigkeit der Fahrzeuge wurde bei diesem Konzept jedoch mit einem Treibstoffverbrauch jenseits der 100 Liter pro 100 Kilometer Fahrtstrecke erkauft.
Elektromotoren
Eine weitere Sonderform ist der Allradantrieb durch separate Elektromotoren an jedem bodenberührenden Rad, die dort als Radnabenmotoren eingesetzt werden. Bereits im Jahr 1900 entwickelte Ferdinand Porsche im Auftrag der Automobilfabrik Jacob Lohner & Co ein als Lohner-Porsche bekanntes Fahrzeug mit dieser Technik. Allerdings hatten bei diesem Elektromobil alleine die Bleiakkumulatoren ein Gewicht von nicht weniger als 1800 kg.
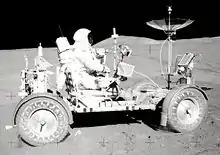
Beim als Mondauto bekannten Lunar Roving Vehicle fand diese Variante des Allradantriebs ebenfalls Verwendung. Hier kam an jedem Rad ein 180 W leistender Elektromotor zum Einsatz. Das High-Tech-Gefährt wurde 1969 entwickelt und kam erstmals im Juli 1971 auf dem Mond zum Einsatz.
Anfang der 2000er-Jahre wurde die Entwicklung von Allradfahrzeugen mit Radnabenmotoren weiter vorangetrieben. Durch immer kompakter werdende Stromspeicher wird der Einsatz dieser Technik in Fahrzeugen erleichtert. Peugeot stellte 2005 mit dem Peugeot Quark ein allradangetriebenes Konzeptfahrzeug vor.
Im selben Jahr präsentierte Mitsubishi den auf dem Lancer Evolution IX basierenden Mitsubishi Lancer Evolution MIEV (Mitsubishi In-wheel motor Electric Vehicle). Das Fahrzeug verfügt über eine Gesamtleistung von 200 kW (50 kW pro Motor) und über ein maximales Drehmoment von 518 Nm. Es erreicht eine Höchstgeschwindigkeit von 180 km/h und hat eine Reichweite von 250 km. Bei der Shikoku EV Rallye 2005, einer japanischen Rennveranstaltung für Elektrofahrzeuge, sollte der Lancer Evolution MIEV erstmals an den Start gehen. Mitsubishi plante, dieses Antriebskonzept bis zum Jahr 2010 zur Serienreife zu entwickeln.[7]
Ebenfalls aus Japan stammen die Forschungsfahrzeuge KAZ und Eliica (Electric Lithium Ion Car) der Keio University, die beide durch Radnabenmotoren angetrieben werden. Diese werden wiederum von Lithium-Ionen-Akkus gespeist. Besonderheiten der Fahrzeuge sind zum einen die Anzahl der Räder – acht – zum anderen die erreichten Höchstgeschwindigkeiten von bis zu 370 km/h.
Der aktuell (2020) größte LKW der Welt, der BelAZ-75710 (Gesamtgewicht max. 810 t), hat an jedem seiner vier Zwillingsreifen einen 1200 kW-Elektromotor, welcher von einem Dieselgenerator gespeist wird.[8]
Hybridantrieb
Der Lexus RX400h nutzt sein Hybridkonzept auf besondere Weise für den Allradantrieb: Auf die Vorderachse wirkt das Hybridtriebwerk aus Benzin- und Elektromotor, die Hinterräder werden von einem eigenen Elektromotor angetrieben. Dadurch entfallen Kardanwelle und Mitteldifferenzial als koppelnde Elemente.
Ähnlich werden Hybridfahrzeuge von PSA angetrieben, z. B. der Peugeot 508 RXH. Hier kommt an der Vorderachse ein Dieselmotor zum Einsatz, die Hinterachse wird durch einen Elektromotor angetrieben. das Fahrzeug wählt selbst aus, welche Räder in welchem Fahrzustand angetrieben werden, bei Bedarf kann aber ständiger Allradantrieb eingeschaltet werden.
Die Schwäche dieses Konzepts zeigt sich jedoch, wenn bei Bergauffahrt die Vorderräder den Grip verlieren: bei größeren Steigungen im Gelände ist der Elektromotor an der Hinterachse dann mit dem Fahrzeuggewicht überfordert. Allerdings treten solche Steigungen üblicherweise nicht im normalen Straßenverkehr auf.
Eine andere Variante bot Nissan im March (in Deutschland als Nissan Micra bekannt) mit der Zusatzbezeichnung e-4WD an, die vor allem für den japanischen Markt gedacht war. Ein Ottomotor trieb die Vorderachse an und ein E-Motor die Hinterachse. Das Fahrzeug benötigte keine Akkus, da der Ottomotor auch mit einem zweiten Generator für den elektrischen Hinterradantrieb verbunden war. Die Leistungsregelung des E-Motors erfolgte über die Regelung des Ankerstroms des Generators. Der elektrische Hinterradantrieb war jedoch mehr eine Anfahrhilfe, die zunächst mit einem 3-kW-Motor bis 25 km/h und später mit einem 12-kW-Motor bis 40 km/h unterstützte[9]. Oberhalb dieser Geschwindigkeiten wurde der E-Motor von der Achse mechanisch entkoppelt. Durch die große Untersetzung des kompakten Hinterachsmoduls wäre der Motor sonst überdreht worden.
Eine hydrostatisch angetriebene Achse
Bei MAN-Lastkraftwagen mit Hydrodrive wird die Vorderachse nicht mechanisch, sondern hydrostatisch angetrieben. Der Antrieb kann bei Geschwindigkeiten bis zu 30 km/h genutzt werden. Dieses System ist auch bei Volvo Trucks lieferbar. Bei Daimler nennt sich das System HAD (Hydraulic Auxiliary Drive) und wird vor allem bei Baustellenfahrzeugen verbaut.
Bezeichnungen
Speziell bei Lastkraftwagen kommen oft auch Varianten mit mehr als zwei Achsen vor. Um kenntlich zu machen, wie viele Achsen bzw. Räder angetrieben werden, hat sich die Antriebsformel etabliert: [Zahl der Räder] × [Zahl der angetriebenen Räder].
Der Standard-Pkw hätte demnach die Antriebsart 4×2, der Allrad-Pkw oder Geländewagen 4×4 (englisch four by four; 4WD ist das Kürzel für four wheel drive; FWD wird häufig fälschlich ebenfalls mit four wheel drive übersetzt, steht jedoch für front wheel drive bzw. Frontantrieb, so wie RWD die englische Abkürzung für rear wheel drive bzw. Heckantrieb ist und AWD all wheel drive Allradantrieb bedeutet und somit – neben 4×4 und 4WD – ebenfalls als Abkürzung verwendet wird), der dreiachsig angetriebene Baustellen-Lkw 6×6 oder der Dreiachs-Reisebus mit nur einer angetriebenen Achse entsprechend 6×2 bzw. mit zwei angetriebenen Achsen 6×4. Außerdem gibt es Baustellen-Lkw mit allen vier angetriebenen Achsen, somit 8×8.
Die meisten Militärfahrzeuge besitzen einen Allradantrieb, bei entsprechenden Lkw und Panzerwagen sind häufig auch die Antriebsformeln 6×6 bzw. 8×8 zu finden.
Allradantrieb in Pkw

- Das erste Allrad-Pkw-Serienfahrzeug der Welt war der von 1966 bis 1971 gebaute Jensen FF, der über einen permanenten Allradantrieb von Ferguson Research verfügte. Der FF ('Formula Ferguson') wurde aber nur in einer kleinen Stückzahl von 320 Exemplaren produziert. Ferguson Research stattete neben dem eigenen Jensen FF auch einige Fahrzeuge von Ford mit Allradantrieb aus. Angesichts der geringen Stückzahl haben diese Ford-Sonderfahrzeuge jedoch keine größere Bedeutung für die Geschichte des Allradantriebs in Pkw.
- 1972 stellte Subaru den Subaru Leone Station Wagon AWD vor. Dieses Modell war der erste Pkw mit zuschaltbarem Allradantrieb, der in Großserie gefertigt wurde.
- 1976 wurde der Lada Niva als erstes Großserienfahrzeug mit permanentem Allradantrieb vorgestellt.
Einführung des permanenten Allradantriebs in Pkw nach Fahrzeugherstellern
| Jahr | Hersteller | Modell/Baureihe | Großserie | Kleinserie |
|---|---|---|---|---|
| 1966 | Jensen | Jensen FF | x (320 Stück) | |
| 1972 | Subaru | Leone | x | |
| 1976 | Lada | Lada Niva | x | |
| 1979 | AMC | AMC Eagle | x | |
| 1980 | Audi | Audi quattro | x | |
| 1983 | Alfa Romeo | Alfa 33 4×4 | x | |
| 1985 | BMW | BMW 325iX | x | |
| 1985 | Lancia | Lancia Delta HF 4WD | x | |
| 1985 | Volkswagen | VW Passat Syncro | x | |
| 1986 | Ford | Ford Scorpio 4×4 | x | |
| 1987 | Mazda | Mazda 323 4WD | x | |
| 1987 | Mercedes-Benz | Mercedes W 124 4MATIC | x | |
| 1987 | Porsche | Porsche 959 | x (292 Stück) | |
| 1988 | Opel | Opel Vectra 4×4 | x | |
| 1988 | Porsche | Porsche 911 Carrera 4 | x | |
| 1989 | PSA Peugeot Citroën | Citroën BX / Peugeot 405 | x | |
| 1991 | Bugatti | Bugatti EB110 | x (ca. 300 Stück) | |
| 1991 | Lamborghini | Lamborghini Diablo VT | x | |
| 1992 | Fiat | Tempra 4×4 | x | |
| 2004 | Jaguar | Jaguar X-Type | x | |
| 2010 | Dacia | Dacia Duster 4WD | x | |
| 2011 | Ferrari | Ferrari FF | x | |
Andere Bezeichnungen für Pkw mit Allradantrieb
Zusätzlich zu den Standardbezeichnungen haben einzelne Pkw-Hersteller spezielle Bezeichnungen eingeführt und sich zum Teil rechtlich schützen lassen, wie beispielsweise:
- Audi quattro
- BMW xDrive
- Ferrari 4RM
- Honda Real Time 4WD
- Jeep Active Drive
- Land Rover Active Driveline
- Mercedes 4MATIC
- MINI ALL4
- Seat 4Drive
- Subaru Symmetrical AWD
- Suzuki Four Grip und AllGrip
- Volkswagen Syncro und 4Motion
Allradantrieb in SUV

Als SUV (Sports Utility Vehicle) werden im deutschsprachigen Raum seit Mitte der 1990er-Jahre Fahrzeuge bezeichnet, die den Fahrkomfort eines Straßenfahrzeugs und die Geländetauglichkeit eines Geländewagens unter einen Hut bringen sollen. Deswegen sind SUVs in den meisten Fällen zwar mit einem Allradantrieb erhältlich, eignen sich aber trotzdem nur bedingt für einen Einsatz abseits asphaltierter Straßen. 1997 wurde die M-Klasse von Mercedes-Benz vorgestellt. Diese Baureihe war die erste, die auch offiziell mit dem Begriff SUV bezeichnet wurde.
Allradantrieb in Geländewagen
Geländewagen sind fast ausschließlich mit einem Allradantrieb ausgerüstet. Sie haben ihre Wurzeln im militärischen Bereich.
Sonderform
Im Jahr 1935 stellten Vidal & Sohn einen Geländewagen namens Tempo G1200 vor, der auf dem Lieferwagen Tempo V600 basierte. Dieses Fahrzeug verfügte über zwei Motoren mit jeweils 600 cm³ Hubraum und zwei 4-Gang-Getriebe. Dadurch konnte der G1200 wahlweise mit Front- oder Heckantrieb gefahren werden. In schwierigem Gelände war es aber auch möglich, beide Motoren gleichzeitig zu nutzen und somit einen Allradantrieb zu simulieren. Der Tempo G1200 wurde von 1937 bis 1944 insgesamt 4000 Mal produziert.
Militär-Geländewagen


Im Jahr 1940 fragte die US-Armee wegen des Zweiten Weltkrieges bei 135 Firmen an, ob diese in der Lage seien, ein geländegängiges Militärfahrzeug nach bestimmten Vorgaben zu konstruieren. Ein Prototyp wurde bereits kurze Zeit später erwartet. Die einzigen Unternehmen, die diese Aufgabe erfüllen konnten oder wollten, waren American Bantam, Ford und Willys-Overland. Kurz darauf stellte American Bantam seinen Prototyp vor. Auf Grundlage der Pläne für das Fahrzeug entwickelte Willys-Overland den Quad und Ford den Pygmy.
Die Wahl der US-Armee fiel auf den Willys, da dieser die gestellten Anforderungen deutlich übertraf. Dieser wurde ab 1941 zunächst in einer Kleinserie als Willys MA produziert und wenige Monate später durch die nur geringfügig überarbeitete Version Willys MB ersetzt. Um die große Nachfrage befriedigen zu können, wurde ein Vertrag mit Ford abgeschlossen, die den Willys als Ford GPW nach Vorgabe von Willys-Overland fertigte.
Zivile Geländewagen
Der Willys ist auch der Ur-Jeep. Er machte den Begriff Jeep weltweit bekannt und seit Langem wird Jeep häufig als Synonym für fast alle Geländewagen gebraucht. Den Begriff Jeep ließ sich Willys-Overland 1950 schützen; heute gehört die Marke Jeep zu Chrysler. Der Ursprung des Wortes Jeep ist nicht eindeutig geklärt. Nach der am weitesten verbreiteten, aber strittigen Theorie, geht es auf die angeblich ursprüngliche Bezeichnung der US-Armee zurück, GP für general purpose.
Im Jahr 1945 wurde mit dem Jeep CJ-2A der erste zivile Geländewagen auf Grundlage des Willys MB von Willys-Overland vorgestellt.
Am 17. Juni 1970 stellte Land Rover, damals unter dem Dach der staatlichen British Leyland, den Range Rover vor, den ersten in Großserie produzierten Geländewagen mit einem permanenten Allradantrieb. Das gleiche Antriebsprinzip übertrug der Hersteller 1984 auf den Nachfolger des klassischen Land Rover, den Defender, sowie auf den 1989 erschienenen Discovery.
Einführung des Allradantriebs in Geländewagen nach Fahrzeugherstellern
| Jahr | Hersteller | Modell/Baureihe | Militärfahrzeug | Großserie | Kleinserie |
|---|---|---|---|---|---|
| 1936 | Tōkyū Kurogane Kōgyō | Kurogane Typ 95 | x | x | |
| 1936 | Stoewer, BMW & Hanomag | leichter gel. Einheits-Pkw | x | x | |
| 1937 | Horch, Wanderer, Opel & Ford | mittl. & schw. gel. Einheits-Pkw | x | x | |
| 1938 | Laffly | Laffly V 15 T / R | x | x | |
| 1940 | GAZ | GAZ-61 | x | x | |
| 1941 | Willys-Overland | Willys MA/MB | x | x | |
| 1941 | Volkswagen | Typ 128 Schwimmwagen | x | x | |
| 1945 | Willys-Overland | Jeep CJ-2A | x | ||
| 1948 | Land Rover | Land Rover Serie I | x | ||
| 1951 | Toyota | Toyota BJ | x | x | |
| 1951 | Alfa Romeo | Alfa Romeo Matta | x | ||
| 1951 | Fiat | Fiat Campagnola | x | ||
| 1956 | Auto Union | F91/4 Munga | x | x | |
| 1957 | Moskwitsch | Moskwitsch-410 | x | ||
| 1970 | Suzuki | Suzuki LJ10 | x | ||
| 1976 | Lada | Lada Niva | x | ||
| 1979 | Mercedes-Benz Steyr Daimler Puch |
G-Modell | x | ||
| 1986 | Lamborghini | LM002 | x | ||
Allradantrieb in Lkw
Erste Lastkraftwagen mit Allradantrieb entstanden in den 1930er-Jahren. So wurde in der Sowjetunion 1932 mit dem JaG-12 ein Prototyp mit vier angetriebenen Achsen gebaut (8×8), der letztlich nicht in Serie ging.[10]
Der erste deutsche Lkw mit Allradantrieb wurde 1935 von Büssing (damals unter Büssing-NAG firmierend) vorgestellt und trug die Bezeichnung Typ 504. Bereits 1931 hatte dieses Unternehmen mit dem Typ G 31 einen Lkw mit drei Achsen entwickelt, von denen zwei angetrieben wurden (Antriebsformel 6×4). Nur wenig später kamen auch Allrad-Lkw anderer Nutzfahrzeughersteller auf den Markt. Beispielsweise das ab 1941 von Magirus-Deutz (damals unter Klöckner-Deutz firmierend) gebaute Modell A330, das später als A3000 bezeichnet wurde, und das geländegängige Modell 33G1 der Henschel-Werke. Beide wurden in erster Linie an die deutsche Wehrmacht geliefert.
Nach dem Zweiten Weltkrieg löste die Bauwirtschaft das Militär als Hauptabnehmer von Allrad-Lkw in Deutschland ab: Durch den Wiederaufbau nach dem Krieg und durch das Wirtschaftswunder wurden überall geländegängige Baufahrzeuge gebraucht, sodass die meisten damaligen Lkw-Hersteller Allradfahrzeuge in ihr Angebot aufnahmen. Bis Mitte der 1960er-Jahre waren für Allrad-Lkw in Deutschland Hauber die übliche Bauart, Frontlenker mit Allradantrieb setzten sich erst Ende der 1960er-Jahre bis Anfang der 1970er-Jahre durch. Der Allradantrieb ist bei Lkw nach wie vor weit verbreitet, außer in der Bauwirtschaft und beim Militär auch bei Feuerwehren und anderen Hilfsdiensten wie Rotes Kreuz und THW. Bedeutende Hersteller in Europa sind beispielsweise MAN, Mercedes-Benz, IVECO und Tatra.
Allradantrieb in der Landtechnik
Im Jahr 1857 wurde dem Erfinder John S. Hall vom Patentamt der Vereinigten Staaten ein Patent für einen Dampftraktor mit Allradantrieb erteilt. Eine praktische Umsetzung dieser Idee fand wegen der sehr eigenwilligen Konstruktion vermutlich nicht statt, zumindest ist heute davon nichts mehr bekannt. Fehlende Differenziale, kombiniert mit einer Knicklenkung, hätten das Gefährt in Kurven nahezu unfahrbar gemacht.
Der erste Traktor mit Allradantrieb wurde 1907 von der Gasmotoren-Fabrik Deutz AG hergestellt. Infolge der aufwendigen Technik war das Fahrzeug jedoch zu teuer und daher ein Misserfolg. Die Gasmotoren-Fabrik Deutz AG stieg erst 1926 richtig in den Traktorenmarkt ein, allerdings nicht mehr mit allrad-, sondern mit Hinterradgetriebenen Fahrzeugen (vgl. Hauptartikel Deutz-Fahr).
Ab 1923 wurde der Lanz HP-Bulldog mit Allradantrieb und Knicklenkung von der Heinrich Lanz AG produziert. Der HP-Bulldog hatte einen Frontantrieb mit zuschaltbarem Heckantrieb.
Im Jahr 1948 wurde der erste MAN Ackerdiesel mit Allradantrieb entwickelt, der 1949 in die Produktion gelangte. Auch andere Firmen wie Fendt brachten in den Nachkriegsjahren allradgetriebene Traktoren auf den Markt. All diesen Fahrzeugen ist gemein, dass sie sich wegen der hohen Preise – bedingt durch die hohen Produktionskosten der aufwendigen Technik – nicht wirklich durchsetzen konnten. Viele Modelle verschwanden bald darauf wieder vom Markt.
Die Marktsituation änderte sich erst 1951, als der Hersteller Same mit dem 25 PS starken Same DA 25 den ersten in Großserie produzierten Allradtraktor vorstellte. Dies hatte einen enormen Anstieg des Anteils allradgetriebener Fahrzeuge auf dem Traktormarkt zur Folge. Andere Hersteller folgten und so trat der Allradantrieb bei Traktoren seinen Siegeszug an.
Heute liegt der Marktanteil der Traktoren mit Allradantrieb in der Leistungsklasse über 74 kW bei nahezu 100 %. Auch bei kleineren landwirtschaftlichen Arbeitsgeräten ist der Allradanteil mit 70 % recht hoch.
Allradantrieb bei Zweirädern

Die ersten Entwicklungen zu Zweirädern mit Frontantrieb brachten schon 1900 das erste Hybridallradmotorrad hervor – das Vorderrad wurde per Motor angetrieben, das Hinterrad mit Muskelkraft. Den letzten Stand der Entwicklung stellen elektrische AWD-Systeme aus dem Jahr 2008 dar.
Mechanische AWD-Systeme
In den 1950er-Jahren gab es Versuche, Motorräder mit der Allradtechnik auszurüsten. Systeme mit flexibler Antriebswelle erwiesen sich wegen zu hohem Verschleiß als untauglich. Seit 1958 gibt es Allrad-Motorräder der Marke ROKON™ (USA), bei denen beide Räder durch Ketten angetrieben werden. Seit 1994 gibt es von Christini (Philadelphia) Weiterentwicklungen des Systems.[11] Das Fronttriebsystem dieser Motorräder ist leicht an den zusätzlichen Wellen vor der Motorradgabel erkennbar.
Hydraulische AWD-Systeme
Seit dem Jahr 1999 gibt es auch hydraulisch angetriebene Allrad-Motorräder. Der schwedische Hersteller Öhlins entwickelte ein System. Mit einer damit ausgestatteten Yamaha TT 600 R 2WD gewann der Italiener Antonio Colombo die Sardinien-Rallye 1999.[12] Bei diesem System drückt eine Hydraulikpumpe, die im Getriebe des Motors untergebracht ist, Öl durch flexible Druckleitungen zum Vorderrad. Das Öl treibt dort einen kleinen Hydraulikmotor an, bevor es gefiltert wieder zur Pumpe zurückfließt. Die Leitungen sind, ähnlich wie eine Tachowelle, federnd verlegt. Bei diesem System werden bis zu 15 Prozent der Motorleistung auf das Vorderrad übertragen. Der so aufgebaute Allradantrieb im Motorrad verspricht vor allem eine höhere Kurvenstabilität und eine leichtere Fahrzeugkontrolle. Derzeit wird er von vielen Herstellern forciert entwickelt, eine Serienreife erlangte er jedoch noch nicht. Der Einsatz beschränkte sich bisher auf den Motorsport.
Elektrische AWD-Systeme
Ein System für elektrischen AWD-Antrieb für Motorräder wurde 2008 von KTM patentiert.[13] Das System hat weniger Mechanik und ist durch elektronische Regelmöglichkeiten an den Fahrbetrieb abstimmbar.[14] Neue Erkenntnisse ermöglichen die Erzeugung der notwendigen Drehmomente durch die Elektromotoren.

Mehrspurige Zweiräder
Eine exotische Allradanwendung stellt der Segway Personal Transporter dar. Er ist per Definition ein „zweirädriges aber mehrspuriges Motorfahrzeug“. Er zählt nicht zu den Zweirädern. Es werden spezielle Modelle mit breiten Reifen für den Betrieb im Gelände angeboten.
Allradantrieb im Automobilsport
Für diverse Formen des Automobilsports ist der Allradantrieb heutzutage ein absolutes Muss. Audi beispielsweise revolutionierte in den frühen 1980ern mit dem Audi quattro den Rallyesport – die ersten vierradgetriebenen Rennwagen gab es allerdings bereits einige Jahrzehnte früher. In der folgenden Auflistung finden sich die innovativsten Allradautos bzw. die wichtigsten Allradentwicklungen der Rennsportgeschichte.

1903: Spyker 60 H.P. – erster Rennwagen mit permanentem Allradantrieb
Der Spyker 60 H.P. (sprich: Speiker; das y [statt ij] im Firmennamen hatte man für den internationalen Markt gewählt) genannte Wagen der beiden niederländischen Brüder Jacobus und Hendrik-Jan Spijker aus Amsterdam gilt heutzutage sowohl als das erste Automobil mit permanentem Allradantrieb wie auch als der erste Rennwagen mit Allradantrieb. Er hatte einen Sechszylinder-Motor mit 8,6 Liter Hubraum und Bremsen für alle vier Räder.
Mit dem vom Belgier Joseph Laviolette entwickelten 60 H.P. bestritt Jacobus Spijker selbst Rennen und gewann 1906 überlegen das Bergrennen des Birmingham Motor Club in England – im Regen. Mehr als 100 Jahre nach seiner Entstehung kann man den Spyker 60 H.P. in der Louwman Collection (vormals: Nationaal Automobiel Museum) in Raamsdonksveer bei Geertruidenberg besichtigen.
Ab 1931: Bugatti Type 53
Ettore Bugatti baute mindestens zwei Allrad-Fahrzeuge (Bugatti Type 53, 8-Zylinder-Reihenmotor, 4972 cm³ Hubraum und ca. 224 kW/300 PS) für Bergrennen, zumindest einer davon wurde von seinem Sohn Jean Bugatti gefahren, u. a. 1932 bei der schon damals berühmten britischen Bergprüfung Shelsley Walsh.
Bekannt ist, dass René Dreyfus im März 1934 auf einem T53 4WD das Bergrennen La Turbie von Nizza gewann und dass Robert Benoist im April 1935 bei zwei weiteren französischen Bergrennen (bei Reims und bei Nancy) siegreich war. Die zwei Autos existieren auch heute noch. Einer der beiden ist Bestandteil der berühmten Collection Schlumpf, der andere gehört einem privaten Sammler. Es soll allerdings noch einen dritten T53 mit Allradantrieb gegeben haben, über dessen Verbleib jedoch nichts mehr bekannt ist.
1932: Miller 4×4 beim Indy 500
Der Konstrukteur und Rennfahrer Harold Arminius Miller setzte 1932 in Indianapolis einen Miller 4×4 mit einem V8-Motor ein, der 5 Liter Hubraum besaß. 1934 kam dieses Fahrzeug auch beim Grand Prix von Tripolis und auf der Berliner AVUS zum Einsatz.

1947: Porsche baut Formel-1-Fahrzeug „CIS 360“
Porsche entwickelte in Gmünd für den italienischen Industriellen und Rennwagen-Konstrukteur Piero Dusio den Cisitalia CIS 360 als 1,5-l-Fahrzeug mit 12-Zylinder-Mittelmotor für die Formel 1. Es gibt verschiedene Leistungsangaben von 280 bis zu 550 PS (206 bis 404 kW) bei etwa 10.500 min−1. Das Getriebe war mit Porsche-Synchronisation versehen. Der Wagen hatte einen während der Fahrt abkoppelbaren Vorderradantrieb.[15]
Mehr als 20 Jahre später wurde aus wiederentdeckten, noch vorhandenen Ersatzteilen ein zweiter CIS 360 zusammengebaut, der somit unter Sammlern als sogenanntes Bitsa car gilt. Das Original von Piero Dusio verbrachte, nach dessen finanziellem Ruin in Italien, unter dem Namen Autoar (für Auto Motores Argentinos) in den 1950ern einige Jahre in Buenos Aires und befindet sich heute im Porsche-Museum in Stuttgart. Der aus Ersatzteilen entstandene zweite CIS 360 steht (angeblich ohne Kurbelwelle und deswegen noch immer nicht ganz fertiggestellt) als Cisitalia-Porsche 360 seit Anfang der 1970er im Museum der britischen Rennstrecke Donington Park.
1961: Erster tatsächlich eingesetzter Formel-1-Allradrennwagen
Die Harry Ferguson Research Ltd. setzte erstmals einen allradgetriebenen Formel-1-Wagen namens Ferguson-Climax P99 ('Project 99') mit 1,5-l-Motor unter Rennsport-Veteran Jack Fairman beim Großen Preis von Großbritannien in Aintree ein. Später übernahm Stirling Moss das Steuer und wurde am Ende disqualifiziert. Dies war der einzige Auftritt des P99 4WD bei einem offiziellen GP. Noch im selben Jahr gewann Stirling Moss damit das nicht zur F1-WM zählende Oulton Park Gold Cup Race – nach häufigen Regenschauern mit mehr als 40 Sekunden Vorsprung auf den Brabham-Cooper. Auch auf trockener Fahrbahn wurden eindeutig die Kapazitäten dieses Allradrennwagens demonstriert, als er im vom Regen verschont gebliebenen Training nur zwei Zehntelsekunden hinter Bruce McLaren und dessen Cooper lag.
Im Winter 1962/1963 bestritten Graham Hill und Innes Ireland mit dem P99 (jetzt mit einem 2,5-l-Motor ausgerüstet) die Tasman Series von Australien und Neuseeland und 1964 gewann Peter Westbury damit die British Hill-Climb Championship (die 'Britische Bergmeisterschaft'). Der P99 ist jetzt Bestandteil der Rennwagen-Sammlung von Donington Park.
1961: Erstmals im Autocross
Der Brite Howard Parkin konstruierte mit seinem Cannonball (‚Kanonenkugel‘) das erste allradgetriebene Fahrzeug im Autocross. Bis in die 1970er war der einsitzige Open Special fast unschlagbar und sicherte Parkin bei über 60 Rennen den Gesamtsieg, der jeweils durch die Tagesbestzeit (FTD bzw. Fastest Time of the Day) ermittelt wurde.

1964: BRM P67 (Formel 1)
Der junge Techniker Mike Pilbeam bekam von seinem Team B.R.M. die Möglichkeit geboten, einen Formel-1-4×4-Rennwagen zu bauen. Aus einem veralteten P56-Fahrgestell, einem V8-Motor mit 1500 cm³ Hubraum und 147 kW/200 PS und einem Formula-Ferguson-System erstellte Pilbeam den BRM P67, den Richard Attwood während des Trainings zum Britischen Grand Prix von Brands Hatch testete.
Unmittelbar danach entschied sich B.R.M. gegen den allradgetriebenen P67 und setzte seine Jetons weiterhin auf Zweiradantrieb. Einige Jahre später übernahm Privatfahrer Peter Lawson das Fahrzeug, nun mit einem weit potenteren 2,1-l-Tasman-Motor ausgerüstet, und wurde damit völlig überlegen Britischer Bergmeister 1968. Der B.R.M.-Monoposto steht heutzutage ebenfalls in der Donington-Kollektion.
1964: STP-Oil Novi V8 4WD (Indy 500)
Bobby Unser bestritt das Rennen in Indianapolis mit einem STP-Oil Novi V8 mit Allradantrieb. Das Auto wurde jedoch bei einem Unfall beschädigt und Unser musste aufgeben. Dasselbe Auto fiel 1965 in Indy erneut aus, diesmal mit technischen Problemen.
1968: Lotus 56 mit Gasturbinen (Indy 500)
Lotus setzte zusammen mit Andy Granatelli insgesamt vier mit Gasturbinen ausgerüstete Lotus 56 mit Allradantrieb in Indianapolis ein. Mike Spence, den man als Ersatzfahrer für den verstorbenen Jim Clark ins Team aufgenommen hatte, verunglückte in einem der vier Autos während des Trainings tödlich.
Joe Leonard und Graham Hill qualifizierten sich mit ihren 56ern als Schnellster und Zweitschnellster. Leonard fuhr im Rennen ständig unter den ersten drei, gab aber in Runde 192 mit defekter Benzinpumpe auf. Hill fiel nach einem Unfall mit Aufhängungsschaden aus.
1969: Erstmals im Rallycross
Am 8. Februar brachten die beiden britischen Firmen Ford und BMC – am selben Tag, aber auf verschiedenen Rennstrecken – die ersten allradgetriebenen Fahrzeuge im Autosport Rallycross an den Start. Während der Triumph 1300 4WD von BMC-Pilot Brian Culcheth sein Rennen in Lydden (bei Dover) gewann und der Sieg auch anerkannt wurde, wurde Ford-Werksfahrer Roger Clark der Gesamtsieg mit dem Ford Capri 3000GT 4WD in Croft (bei Darlington) schon bald nach dem Rennen wieder aberkannt, weil der Rallycross Special mit Ferguson-Antrieb damals „nicht dem gültigen Reglement entsprach“.
BMCs Triumph wurde nicht mehr eingesetzt, Ford hingegen führte sein Projekt fort und baute einen weiteren Capri für Roger Clarks Bruder Stan. Ein drittes Capri-4WD-Projekt, von Privatfahrer Rod Chapman, wurde werksseitig ebenfalls unterstützt und nach einigen Monaten kontinuierlicher Weiterentwicklung waren die „Ford-Biester“ so stark und der Konkurrenz dermaßen überlegen, dass sie erst 5 oder 10 Sekunden (4WD Penalty) nach ihren Gegnern starten durften. Trotzdem gelang es den Capri-Piloten zumeist, am Ende dennoch in Führung zu liegen und ihre jeweiligen Rennen zu gewinnen.
Während Ford selbst seine inzwischen gut 250 PS starken 3000GT 4WD im Herbst 1971 aus der Konkurrenz nahm, um sich von nun an verstärkt dem neuen Ford Escort zu widmen, war Chapman auch 1972 noch mit seinem Allrad-Capri auf britischen Rallycross-Strecken erfolgreich.
Ab 1969: Erneut Formel 1

Bis einschließlich 1971 (Lotus) prüften in der Formel 1 die Teams von Lotus, Matra, McLaren und selbst Motorenbauer Cosworth allradgetriebene 3-l-Rennwagen. Lotus baute zwei Lotus-Ford 63 (V8-Motor, 2993 cm³, 430 PS bei 9000 min−1), die mit Gasturbinen von Pratt & Whitney ausgestattet werden sollten, wegen Terminproblemen jedoch Cosworth-Motoren erhielten.
Nachdem Graham Hill den 'Lotus 63' für den Niederländischen Grand Prix in Zandvoort getestet hatte, Joakim Bonnier beim britischen, Mario Andretti beim deutschen und John Miles beim italienischen Grand Prix damit ausgefallen waren, stellten sich immer mehr Probleme für Colin Chapman und seinen Konstrukteur Maurice Phillippe ein. Größter Erfolg war ein zweiter Platz unter Jochen Rindt beim nicht zur Formel-1-WM zählenden Oulton Park Gold Cup Race 1969. Rindts 63/I gehört heute zur Sammlung von Donington.
Colin Chapman versuchte es 1971 noch einmal mit dem Allrad-Konzept und stellte seinen Lotus 56B vor, eine Art Wiederverwertung des Indy-Wagens von 1968. Nachdem aber auch dieses Gasturbinen-Fahrzeug keine Formel-1-Erfolge erwarten ließ, obwohl es in Zandvoort unter Nachwuchsfahrer David Walker den verregneten 1971er-GP der Niederlande vielleicht sogar hätte gewinnen können, wenn Walker nicht in vielversprechender Position mit dem Fahrzeug von der Piste geflogen wäre, gab auch das Lotus-Team seine Allrad-Ambitionen endgültig auf.
.jpg.webp)
Genau wie Lotus hatte auch Matra einen Allrad-Rennwagen zum Testen nach Zandvoort gebracht – genau wie Lotus setzte auch Matra ihn nicht im eigentlichen Rennen ein. Jackie Stewart war mit dem zweiradgetriebenen MS80 im Training um knapp zweieinhalb Sekunden schneller als im vierradgetriebenen MS84, worauf die Wahl des Wagens keiner weiteren Frage bedurfte. Zwei Wochen später, beim Französischen GP in Clermont-Ferrand, war Stewart im MS84 sogar sechs Sekunden langsamer und wieder wählte er den MS80. Weitere zwei Wochen später, beim Großbritannien-GP in Silverstone, brachte Jean-Pierre Beltoise seinen MS84 als Neunter ins Ziel. Beim GP von Kanada im Mosport Park gelang es Matra-Pilot Johnny Servoz-Gavin, sich mit einem sechsten Platz den einzigen je durch ein Allrad-Fahrzeug gewonnenen Formel-1-WM-Punkt zu sichern. Allerdings stellte sich schon bald nach der Zieldurchfahrt heraus, dass das Frontdifferenzial seines MS84 nicht funktioniert hatte und er dadurch einzig mit Heckantrieb unterwegs gewesen war …

McLaren war ziemlich optimistisch, plante gleich eine kleine Serie von 4×4-Fahrzeugen, baute am Ende aber nur einen einzigen mit der Typbezeichnung McLaren-Ford M9A-1 (V8-Motor, 2999 cm³, 321 PS bei 9000 min−1). Der Motor kam von Cosworth, den Antrieb entwickelte Jo Marquardt und als Testpilot fungierte Derek Bell beim Britischen GP in Silverstone. 1971 übernahm die Donington Collection den M9A, nachdem Bruce McLaren Motor Racing das Interesse daran verloren hatte.

Auch die Motorenbauer von Cosworth entwickelten 1969 einen Allrad-Formel-1-Rennwagen, der allerdings nie zum Renneinsatz kam. Keith Duckworth (der „worth“ in Cosworth) beauftragte Robin Herd, das Fahrzeug zu entwickeln, das den ultimativen Rahmen für seinen neuen DFV-GP-Motor (V8, 2993 cm³, 430 PS bei 9000 min−1) abgeben sollte. Die aerodynamische Frontpartie des Cosworth 4WD war für damalige Verhältnisse revolutionär, doch genau wie die anderen Allrad-Formel-1-Rennwagen hatte auch der „Cossie“ Probleme mit seinem zu hohen Gewicht. Mike Costin (der „Cos“ in Cosworth) und Trevor Taylor testeten den Rennwagen ausführlich, gaben das Projekt aber bereits im Teststadium wieder auf und 1971 wurde auch dieser Allradler dem Donington-Museum übergeben.
Bis zum noch heute geltenden Allradantriebsverbot für die Formel 1, das 1983 in Kraft trat, gab es drei weitere 4WD-Versuchsfahrzeuge von March (March 2-4-0) und Williams (Williams FW07D und FW08B), die allerdings nie in der Formel-1-WM eingesetzt wurden. Während der March-Wagen später bei einigen Bergrennen eingesetzt wurde, nahmen die Williams-Prototypen an keinem einzigen offiziellen Wettbewerb teil.
1971: DAF 55 Coupé 4WD (Rallycross)
Die Sportabteilung des niederländischen Autowerkes DAF baute in nur 10 Tagen für den Rallycross-Fahrer Jan de Rooy ein DAF 55 Coupé mit Allradantrieb. Ein anfänglich rund 96 kW/130 PS starker Gordini-Motor wurde an die Stelle montiert, wo sich normalerweise der Beifahrersitz befindet. Über eine stufenlose Sportvariomatic, die auf dem Platz des Fahrersitzes befestigt wurde, trieb der Motor jeweils einen Antriebsriemen für die Kardanwellen zur Vorder- und Hinterachse an. Dort leiteten Sperrdifferenziale vom BMW 2002 die Kraft an alle vier Räder weiter.
Der Fahrersitz mitsamt de Rooy thronte über der Variomatic und für die nötige Kopffreiheit des Fahrers hatte man ein Loch in das Dach des Autos geschnitten und es durch eine kleine Kuppel um gut 10 cm erhöht.[16] Das Auto bekam sofort den Spitznamen „het bultje“ verpasst, was in Deutsch mit Buckliger, Buckel, Höcker oder Beule übersetzt werden kann. Für 1972 baute DAF dann gleich zwei 555 Coupés (die dritte 5 stand für die Gruppe 5 laut FIA-Reglement) für Jan de Rooy (Jahre später ein berühmter Allrad-Trucker der Rallye Paris-Dakar) und seinen Bruder Harry de Rooy auf, die jetzt 147 kW/200 PS starke Ford-BDA-Motoren hatten und die nun am dafür bestimmten Platz unter der Kühlerhaube saßen. Neu war außerdem, dass der Variomatic-Allradantrieb eine sogenannte disconnecting control besaß, mit dem der Hinterradantrieb jederzeit stillgelegt werden konnte. Weil ab Ende 1972 (bis einschließlich 1981) Allradantrieb im Rallycross verboten war, wurden beide DAF 1973 und 1974 von den De-Rooy-Brüdern zumeist nur noch mit Heckantrieb gefahren, nur bei feuchter Strecke kam manchmal auch einzig der Frontantrieb zum Einsatz.
Ab 1980: Audi quattro (Rallyesport)
Im November wurde der neue Audi quattro erstmals in Rallye-Ausführung eingesetzt, jedoch nur als Vorauswagen bei der zur Rallye-EM zählenden Algarve-Rallye in Portugal.

1981: Erster offizieller Einsatz des Audi quattro bei der Jänner-Rallye
Der Österreicher Franz Wittmann gewann in seinem Heimatland die zur Rallye-EM zählende Jänner-Rallye und beendete so den ersten offiziellen Sport-Einsatz eines Audi quattro mit einem Sieg.
Bei der rund 14 Tage später stattfindenden Rallye Monte Carlo, dem ersten Lauf zur FIA Rallye-Weltmeisterschaft, fielen die beiden quattros von Hannu Mikkola (nach Bremsversagen) und Michèle Mouton (wegen verschmutzten Benzins) zwar vorzeitig aus, doch hatten sie bereits hier eine ganz neue Ära für den gesamten Rallyesport eingeläutet – denn ohne Allradantrieb ging in dieser Motorsport-Szene danach nichts mehr.
1982: Mit seinem quattro gewinnt Audi die Markenwertung der Rallye-WM
Audi gewann Ende November bei der RAC-Rallye von Großbritannien, durch einen Doppelsieg von Mikkola und Mouton, mit seinem quattro die Markenwertung der Rallye-WM. Den ersten FIA-Titel mit einem Audi quattro hatte sich allerdings bereits einige Wochen zuvor schon Franz Wurz aus Österreich gesichert, der am 3. Oktober in Buxtehude im Urquattro Rallycross-Europameister werden konnte.
Ab 1981: Rennwagen mit Doppelmotor (Pikes-Peak-Bergrennen)
Der Wiener „Formel-V-Papst“ Kurt Bergmann (Kaimann) experimentierte, in Kooperation mit VW-Motorsport, mit mindestens fünf allradgetriebenen Doppelmotor-Fahrzeugen. Er produzierte einen VW Jetta (das „doppelte Jettchen“, 220 PS, 1981), einen VW Scirocco (der „Twin-Scirocco“, 360 PS, 1982) und zwei VW Golf (390 PS, 1985; 500 PS, 1986). Anschließend entwarf er für das berühmte Pikes-Peak-Bergrennen 1987 den BiMotor-Golf. Er wurde dort unter dem deutschen Rallyefahrer Jochi Kleint eingesetzt, der bereits 1985 und 1986 für Bergmann das Rennen gefahren war, verfügte über zwei GTI-16V-Motoren, die mit KKK-Turboladern bestückt insgesamt 652 PS produzierten, fiel aber mit einem schleichenden Aufhängungsschaden vorne rechts endgültig aus – nur noch drei Kurven vor der Ziellinie.

1983: Erster Rennwagen mit beeinflussbarer Kraftverteilung
Der Norweger Martin Schanche (aka „Mister Rallycross“) stellte im Dezember 1983 beim British Rallycross Grand Prix in Brands Hatch seinen neuen Ford Escort XR3 T16 4×4 (Spitzname: „Mjølner“ oder „Thors Hammer“) vor, den ersten Rennwagen mit einem während der Fahrt manuell beeinflussbaren Allradantrieb. Der von Schanche initiierte sowie finanzierte und in Kooperation mit den beiden Briten Mike Endean und Chris Goddard entwickelte variable Xtrac-Antrieb basierte auf einem permanenten Differenzial-gesteuerten Allradantrieb, dessen Längsdifferenzial über eine hydraulisch betätigte Lamellensperre verfügte. Durch stufenlose Ansteuerung der Kupplung konnte das Drehmoment des 560 PS starken Zakspeed-Motors auch abweichend von der 28:72-Prozent-Grundaufteilung an die Vorder- und Hinterachse weitergeleitet werden – bis hin zum starren Durchtrieb. 1984 wurde Schanche mit seinem Xtrac-Escort-Mk3 auf Anhieb FIA Rallycross-Europameister. Das Auto ist, in den Zustand von Dezember 1983 zurückversetzt, jetzt Eigentum von „Mister Xtrac“ Mike Endean, der seit seiner Pensionierung auf der Insel Jersey lebt.
Da auch die Sportabteilung von Opel (damals unter der Leitung von Karl Heinz Goldstein) großes Interesse an Endeans Xtrac-System hatte, war der Engländer ab 1984 auch an der Entwicklung des Opel Kadett für die geplante Gruppe S beteiligt, die später jedoch von der FIA wieder verworfen wurde. Opel setzte zwei Xtrac-Kadett bei der Paris-Dakar 1986 ein, bei der sich der inzwischen leicht modifizierte variable Rallycross-Antrieb ohne Probleme bewährte, während die Stoßdämpfer der Werks-Prototypen gleich serienweise zu Bruch gingen und letztendlich Opel zum vorzeitigen Rückzug aus der Wüstenrallye zwangen. Nach dem Opel-Engagement wurde Mike Endean als Entwickler und Zulieferer ein wichtiger Partner für diverse Werke und Teams in der Rallye-Weltmeisterschaft und der Formel 1.
Ab 1984: „Gruppe-B-Monster“ (Rallye)

Ausgelöst durch die kontinuierlichen Erfolge des Audi quattro und seiner Weiterentwicklung Audi quattro A2 begann in der Rallye-Weltmeisterschaft eine Art Wettrüsten. Hatte man zuvor hauptsächlich zweiradgetriebene Serien-Straßenautos zu potenten Rallye-Fahrzeugen aufgepäppelt, so wurden nun reine Allrad-Rennmaschinen entwickelt und für die Gruppe B der FIA homologiert. Dafür mussten mindestens 200 Exemplare des betreffenden Modells produziert und der FIA präsentiert werden. Der Großteil dieser Kleinserienfahrzeuge wurde danach an Liebhaber für den Straßeneinsatz oder an Auto-Sammler verkauft, aus nur etwa zehn Prozent der Produktion schufen die Werksteams dann extreme Rallye-Geräte. Peugeot 205 Turbo 16 E2, Ford RS 200 und Lancia Delta S4 hießen die wichtigsten Vertreter der Turbo-Mittelmotor-Fraktion, während die Audi Sport quattro S1 über einen Turbo-Frontmotor und die MG Metro 6R4 über einen Sauger-Heckmotor verfügten. Ihre Leistung war meist zwischen 300 und 400 kW (ca. 400 und 550 PS) angesiedelt. Diese regelrechten „Allradmonster“ konnten nur von einigen wenigen Weltklasse-Piloten gut gefahren und am Limit bewegt werden.
Nach mehreren schweren und zum Teil auch tödlichen Unfällen zog die FIA 1986 die Notbremse und verbannte die Überflieger für immer aus der Rallye-WM. Von 1987 bis einschließlich 1992 fanden dann gut zwei Dutzend dieser leistungsstarken Gruppe-B-Rennwagen, zum Teil sogar noch weiter leistungsgesteigert bis über 480 kW/650 PS, in der Rallycross-EM ihr internationales Betätigungsfeld. Heutzutage stehen die meisten Gruppe-B-Rennwagen in Garagen von Sammlern und in Rennsport-Museen. Nur selten kommen einige von ihnen noch zum Einsatz, speziell bei diversen Bergrennen, Rallycross-Rennen in Großbritannien und Irland oder auch bei den Youngtimer-Rallyes.

1985: Porsche 959 mit elektronisch gesteuertem variablen Allradantrieb
Porsche stellte den Medien den Porsche 959 für die Gruppe B vor. Die Straßenversion des Supersportwagens hat einen 6-Zylinder-Boxermotor mit 2,85 Liter Hubraum, dem zwei Turbolader zu mindestens 331 kW/450 PS verhelfen. Der Allradantrieb des 959 ist variabel elektronisch gesteuert. Die Vorderräder können nach Wahl von drei verschiedenen Automatikprogrammen über eine hydraulisch geregelte Lamellen-Kupplung stufenlos zugeschaltet werden. In einer vierten Einstellung „für besonders tiefes Gelände“ wird die Motorleistung von der Bodenhaftung gesteuert auf alle vier Räder verteilt. Anfang 1986 gewann der Franzose René Metge mit einem Vorserienauto in Rallye-Raid-Ausführung die Paris-Dakar. Von 959, der in seiner Basisversion 420.000 DM kostete, baute Porsche insgesamt 292 Stück, vermutlich vier davon als „Rallye Raid“.
Bergrennen

Wegen der hohen Schwerpunktlage, die bei Rallyes auf unbefestigten Pisten Vorteile bietet, wurden die ersten Evolutionsstufen der Baureihen des Mitsubishi Lancer und des Subaru Impreza fast ausschließlich im Rallyesport eingesetzt. Etwa ab der Evolutionsstufe 7 des Mitsubishi (ab 2001) begannen einzelne Fahrer und Teams mit aussichtsreichen Einsätzen bei Bergrennen. Gegenüber den schon zuvor am Berg erfolgreichen Lancia Delta S4 und Ford RS200 der Gruppe B boten die Autos von Subaru und Mitsubishi die Vorteile einer aktuellen Homologation und eines relativ günstigen Preises, da beide bereits in der seriennahen Gruppe N konkurrenzfähig waren. Beide Fahrzeuge sind etwa gleich schnell.
In den Jahren 2007 und 2008 belegte ein Fahrer auf einem Mitsubishi Evo 9 jeweils den ersten Platz in der Europa-Bergmeisterschaft (Kategorie 1). Lediglich in der Gruppe A bot ein heckgetriebener BMW M3 noch Konkurrenz. Mitentscheidend sind neben den Vorteilen des Antriebskonzepts die weitreichenden Nachhomologationen der beiden japanischen Hersteller sowie deren Turbomotoren. Zwischen 2007 und 2016 belegte immer ein Fahrer auf Mitsubishi Lancer den ersten Platz in der EBM, häufig auch den zweiten.
Sonstige Einsatzbereiche des Allradantriebs

Der Allradantrieb wird auch eingesetzt:
- in Aufsitz-Rasenmähern – zur besseren Bewältigung von Hanglagen
- in Schubkarren mit Radnabenmotor – wobei hier der Begriff Allradantrieb relativ zu betrachten ist, da eine moderne Schubkarre in der Regel ohnehin nur über ein einziges Rad verfügt
- in Quads (spezielle einsitzige Geländefahrzeuge, die einem Motorrad mit vier Rädern entsprechen)
- in Baumaschinen, beispielsweise Radlader und Teleskoplader
- in einigen forstwirtschaftlichen Fahrzeugen und Maschinen, beispielsweise Holzvollernter und Forwarder
- in Omnibussen, welche speziell für schlechte Straßenverhältnisse konzipiert wurden, so zum Beispiel der sowjetische KAwZ-663 aus den 1960er-Jahren oder die aktuelleren russischen Typen KAwZ-39766 und PAZ-3206
Zulassungszahlen
In Deutschland sind laut Angaben des Kraftfahrt-Bundesamtes (KBA) im Jahr 2009 ca. 4,9 Prozent aller Personenkraftwagen mit einem Allradantrieb ausgestattet: Insgesamt gibt es zurzeit 2,0 Millionen Allrad-Pkw bei einem Gesamtbestand von 41,32 Millionen angemeldeter Pkw.
Weblinks
Einzelnachweise
- Kimes, Beverly Rae (Herausgeberin) und Clark, Henry Austin, jr.: The Standard Catalogue of American Cars 1805–1942, 2. Auflage, Krause Publications, Iola WI 54990, USA (1985), ISBN 0-87341-111-0, S. 233 (englisch)
- coachbuilt.com zur Charles F. Caffrey Carriage Co.
- autowallpaper.de Lohner Porsche
- Kimes, Beverly Rae (Herausgeberin) und Clark, Henry Austin, jr.: The Standard Catalogue of American Cars 1805–1942. 2. Auflage. Krause Publications, Iola WI 54990, USA (1985), ISBN 0-87341-111-0, S. 594 (englisch).
- Lutz Nellinger: Der Unimog: Arbeitstier und Kultmobil. Komet, Köln 2016, ISBN 978-3-86941-581-9. S. 11 ff.
- Gleitsteindifferenzial auf www.ArsTechnica.de
- Spiegel Online: MITSUBISHI LANCER EVOLUTION MIEV – Motoren-Quartett, In: spiegel.de, 11. Mai 2007
- Gigant mit Allradantrieb im Bergbau – Aufbereitungstechnik. Abgerufen am 16. Juni 2020.
- Beschreibung des e.4WD System (PDF; 573 kB) durch den Hersteller Nissan
- Zeitungsausschnitt aus der «ЗаРулем» zum JaG-12, Ausgabe März 1981 (zr.ru russisch.)
- The Basics of AWD. Christini Technologies, Inc. (Philadelphia), abgerufen am 16. Oktober 2012 (englisch).
- Allradmotorrad gewinnt Sardinien Rallye (Seite nicht mehr abrufbar, Suche in Webarchiven) Info: Der Link wurde automatisch als defekt markiert. Bitte prüfe den Link gemäß Anleitung und entferne dann diesen Hinweis.
- Patent für AWD mit elektrischem Antrieb für Motorräder, KTM
- Entwicklungsgeschichte AWD für Motorräder KTM (Memento vom 8. Februar 2009 im Internet Archive)
- Reportage: Cisitalia CIS 360. (Memento vom 26. Dezember 2004 im Internet Archive) In: Classic Driver.
- Bild des „Kuppel-DAF“
{kind=link}