Untersteuern
Untersteuern ist ein Begriff aus der Fahrdynamik, der zur Beschreibung des Eigenlenkverhaltens dient. Er beschreibt den Umstand, dass bei Kurvenfahrt der Lenkradwinkel umso größer wird, je schneller der Radius befahren wird.

In modernen elektronischen Stabilitätsprogrammen (ESP) werden die tatsächlichen Bewegungsgrößen mit dem aus dem Lenkradwinkel und der Fahrgeschwindigkeit anhand des internen Einspurmodells abgeleiteten „Fahrerwunsches“ verglichen.[1] Möchte der Fahrer „mehr Kurve fahren“ als tatsächlich gemessen, wird auf Untersteuern erkannt. Bei zu großen Abweichungen wird automatisch das kurveninnere Hinterrad abgebremst und die Motorleistung zurückgenommen.
Das Gegenteil von Untersteuern ist das Übersteuern. Hier muss bei konstantem Radius der Lenkradwinkel mit zunehmender Querbeschleunigung zurückgenommen werden. Alle heutigen Fahrzeuge sind aus Sicherheitsgründen durchweg untersteuernd ausgelegt. Die Vorderachse erreicht zuerst die Rutschgrenze. An der Hinterachse wird das Kraftschlusspotential nicht ausgenutzt, wodurch der Schwimmwinkel begrenzt wird. Zusätzlich bremst sich das Fahrzeug durch das "Schieben" über die Vorderräder ab, wodurch wieder ein engerer Radius befahren werden kann.
Als konstruktiv unsicher gilt jedoch eine Auslegung, bei der das Untersteuern plötzlich in Übersteuern wechseln kann: wenn ein Hinterrad die Haftreibung verliert. Eine solche Auslegung kann insbesondere bei ungeübten Fahrern zu Unfällen führen. Diese Gefahr ist vor allem bei Fahrzeugen mit starkem Hinterradantrieb gegeben: Gasgeben in Kurven kann zum Ausbrechen des Hecks führen, indem das entlastete kurveninnere Rad durchzudrehen beginnt und damit seine Seitenführungsfähigkeit verliert.
Entgegen einer weit verbreiteten Meinung wirkt sich das Untersteuerverhalten nicht nur im Grenzbereich aus, sondern ab mittleren Geschwindigkeiten auch bei normaler Fahrt. Es beeinflusst unter anderem den Agilitätseindruck. Für ein stabiles Fahrverhalten ist eine untersteuernde Auslegung zwingend erforderlich.
Definition
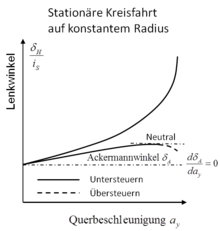
Nach DIN ISO 8855 liegt Untersteuern vor, wenn bei stationärer Kreisfahrt die Differenz der Gradienten von Lenkwinkel und Ackermannwinkel bezüglich der Querbeschleunigung größer Null ist.[2]




Basis der Auswertung ist ein Diagramm, in dem der Lenkwinkel und der Ackermannwinkel als Funktion der Querbeschleunigung dargestellt sind. Auf konstantem Kurvenradius ist der Ackermannwinkel konstant, der Fahrer muss also das Lenkrad mit zunehmender Querbeschleunigung mehr einschlagen. Diese Definition nach Bergmann orientiert sich an Begriffen des Einspurmodells und beschreibt das Eigenlenkverhalten über den gesamten Querbeschleunigungsbereich. Im Gegensatz dazu wird im Rennsport häufig nur das Verhalten an der Kraftschlussgrenze (Rutschgrenze) betrachtet. Als Untersteuernd wird ein Fahrzeug bezeichnet, bei dem zuerst die Vorderachse die Rutschgrenze erreicht. Durch einen größeren Lenkradeinschlag kann die Querbeschleunigung nicht mehr gesteigert werden.
Weblinks
Einzelnachweise
- Erich Schindler: Fahrdynamik: Grundlagen des Lenkverhaltens und ihre Anwendung für Fahrzeugregelsysteme. expert verlag, 2007, ISBN 978-3-8169-2658-0, S. 34. (eingeschränkte Vorschau in der Google-Buchsuche)
- Karl-Ludwig Haken: Grundlagen der Kraftfahrzeugtechnik. 4. Auflage. Hanser, 2015, ISBN 978-3-446-44216-0, S. 252. (eingeschränkte Vorschau in der Google-Buchsuche)