Fahrdynamik
Die Fahrdynamik ist ein Spezialgebiet der Dynamik, das sich, ausgehend von den Gesetzen der Technischen Mechanik und versuchsmäßig gefundenen Abhängigkeiten, mit der Bewegung von Landfahrzeugen (Rad-, Ketten- und Schienenfahrzeugen) befasst.
Dabei umfasst die Fahrdynamik Ermittlungen zu Weg, Zeit, Geschwindigkeit, Beschleunigung, Energieaufwand, Antriebskräfte, Leistungen, Bewegungswiderstände, bei schienengebundenen Fahrzeugen auch die zu befördernden Anhängelasten sowie Wirkungsgrade von Fahrzeugen.
Die Fahrdynamik nutzt technische, physikalische, mathematische und statistische Grundlagen und bietet ihrerseits Grundlagen für sich anschließende maschinentechnische, bautechnische, betriebliche und wirtschaftliche Untersuchungen.
Bewegungsrichtungen
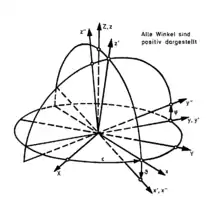
Als räumliche Bewegung von Körpern betrachtet die Fahrdynamik die drei translatorischen Bewegungen in Richtung der Hauptachsen, nämlich
- die Längsbewegung entlang der Längsachse, die eigentliche Ortsveränderung,
- die Querbewegung entlang der Querachse. Eine reine Querbewegung ist das Verschieben von Schienenfahrzeugen auf Schiebebühne(n) und
- die Hubbewegung entlang der Hochachse, in der Regel kombiniert mit der Längsbewegung bei der Fahrt im Gefälle oder der Steigung, eine reine Hubbewegung realisieren Hubbühnen und Aufzüge,
die drei rotatorischen Bewegungen um die drei Hauptachsen (die den Roll-Nick-Gier-Winkel ergeben)
- Gieren (um die Hochachse),
- Nicken (insbesondere bei Wasserfahrzeugen auch Stampfen genannt, um die Querachse) und
- Wanken (insbesondere bei Wasserfahrzeugen auch Rollen genannt, um die Längsachse)
sowie zwei Typen von Schwingungen, jeweils gekennzeichnet durch die periodische Rückkehr in die Ausgangslage (und nicht an die Hauptachsen gebunden):
- Translations- und
- Rotationsschwingung.
Die Reihenfolge der Rotationen ist in DIN ISO 8855 (Begriffe der Fahrdynamik) festgelegt, um von einem raumfesten Inertialsystem zu einem aufbaufesten Koordinatensystem zu gelangen.
In einer engen Betrachtung (z. B. Kraftfahrzeuge) beschränkt die Fahrdynamik sich auf Teilbereiche, wie
- Längsdynamik (Antrieb und Bremsen, Fahrwiderstand, Verbrauch, …)
- Querdynamik (Lenken, Kurvenfahrt, Kippsicherheit, …)
- Vertikaldynamik (Komfort, Ladegutbeanspruchung, Fahrbahnbeanspruchung, …)
Die Ergebnisse solcher Betrachtung finden dann Eingang in die Auslegung des Antriebsstrangs (Motor, Getriebe, …) und des Fahrwerks, insbesondere der Achskonstruktion, aber auch zunehmend in elektronischen Fahrerassistenz-Systemen wie Antiblockiersystem (ABS), Antriebsschlupfregelung (ASR), Elektronisches Stabilitätsprogramm (ESP).
Bei Zweirädern (Fahrrad, Motorrad, …) können Gewicht und Körpermaße des Fahrers nicht vernachlässigt werden. Daher werden hier fahrdynamische Betrachtungen für das System Fahrer / Zweirad durchgeführt. Die Ergebnisse finden Eingang in die Auslegung des Rahmens, der Laufräder, ggf. vorhandener Federelemente und bei Krafträdern der Einbauposition des Antriebsaggregats sowie den oben erwähnten Komponenten soweit vorhanden.
Methoden der Fahrdynamik
Fahrmanöver
Zur objektiven und subjektiven Beurteilung des Fahrverhaltens wird eine Vielzahl standardisierter Manöver durchgeführt.[1] Z. B. werden verschiedene definierte Fahrmanöver wie
- Geradeausfahrt (unter Störeinflüssen)
- Stationäre Kreisfahrt
- Lastwechselreaktion
- (einfacher/doppelter) Fahrspurwechsel ('VDA-Spurwechseltest' nach ISO 3888-2)
- Slalommanöver
- Bremsversuche durchgeführt. Dies kann geschehen
- im "open loop" ("offener Regelkreis") mit vorgegebenen Verlauf von Lenkrad, Fahrpedal oder Bremse, ohne deren Auswirkungen auf die Fahrzeugbewegung zu berücksichtigen, oder
- im "closed loop" ("geschlossener Regelkreis") mit vorgegebener Fahraufgabe. Diese wird in der Simulation oder in späteren Entwicklungsphasen von (meist) Versuchsfahrern durchgeführt, welche die Fahrzeugreaktionen in ihren Steuereingaben berücksichtigen.
Bei diesen Manövern werden eine Vielzahl verschiedener Größen erfasst, um hieraus Kenngrößen zur objektiven Beschreibung des dynamischen Fahrzeugverhaltens abzuleiten. Neben diesen objektiven Kenngrößen ist die subjektive Beurteilung des Fahrverhaltens nach wie vor ein wichtiges Kriterium bei der Abstimmung der Fahrzeuge. Umgekehrt hat die subjektive Beurteilung Rückwirkung auf die Festlegung von Kenngrößen, welche den Subjektiveindruck am besten abbilden.
In längerdauernden Versuchsfahrten werden dagegen Belastungskenngrößen gemessen, die z. B. verwendet werden, um das Lastkollektiv für das Gesamtfahrzeug oder einzelne Komponenten oder um den praxisrelevanten Verbrauch abhängig vom Streckenprofil, Beladungszustand, Fahrertyp, … zu bestimmen.
Fahrdynamiksimulation
Die Fahrmanöver wurden ursprünglich im Fahrversuch entwickelt und durchgeführt. Die digitale Produktentstehung erfordert aber die Nachbildung dieser Manöver in der Fahrdynamiksimulation. Für eine realitätsnahe Simulation werden digitale Fahrzeugmodelle unterschiedlicher Komplexität, vom ebenen Einspurmodell eines Solofahrzeuges bis zu dreidimensionalen Mehrkörpermodellen (MKS) von beispielsweise mehrgliedrigen Lastzügen mit gefederten und ungefederten Massen, komplexer Achskinematik und Elastokinematik (K&C), aufwändigen Reifenmodellen und weiteren Effekten in Simulationsprogrammen verwendet, um bestimmte Fahrmanöver virtuell durchzuführen. Um den Regelkreis Fahrer-Fahrzeug-Umwelt zu schließen, ist zusätzlich ein entsprechendes Fahrermodell und Fahrbahnmodell notwendig. Zur Simulation komplexer Versuchsszenarien muss das Fahrermodell in eine Manöversteuerung eingebettet sein, um Manöverinstruktionen zuverlässig abarbeiten zu können. Entscheidend dabei ist, dass ein dynamisches Umschalten zwischen Closed Loop (Fahrer-Fahrzeug im Regelkreis) und Open Loop Manöver (Offener Regelkreis) in den einzelnen Manöverphasen in Längs- und Querdynamik möglich ist.
Regelsysteme sind untrennbarer Bestandteil der Fahrzeuge. Der Einfluss der fahrdynamisch relevanten Steuergeräte wird in der Regel durch eine Hardware in the Loop- oder Model-in-the-Loop-Simulation berücksichtigt.
Auch hier gibt es Simulationsrechnungen längerdauernder Fahrten, um z. B. den Kraftstoffverbrauch oder die Umweltbelastung abhängig von der Auslegung des Fahrzeuges und Antriebsstrangs (Motorisierung, Übersetzungen, Schaltpunkte, Massen etc.) zu bestimmen. Zur Simulation von realen Fahrstrecken wie z. B. der Verbrauchsrunde der "auto motor und sport" muss der virtuelle Fahrer in der Lage sein sich an entsprechende Gebots- und Verbotszeichen (z. B. Geschwindigkeitsbegrenzung) zu halten.
Der Vorteil der Simulation liegt darin, dass bereits in einer frühen Entwicklungsphase detaillierte Aussagen zu den fahrdynamischen Eigenschaften möglich sind. Angesichts der zunehmenden Produktvielfalt und der Komplexität der Fahrzeuge können Problemfelder frühzeitig identifiziert werden.
Durch die weitgehende Reproduzierbarkeit (bei Hardware in the loop nur angenähert), lassen sich unterschiedliche Ergebnisse eindeutig geänderten Berechnungsvorgaben zuordnen. Hierfür ist es oft ausreichend, das Fahrzeug nur hinsichtlich der betrachteten Einflussgröße detailliert nachzubilden. Ein weiterer Nutzen ist die Erkenntnis komplexer Ursachen, Wirkungen und Zusammenhänge, was in der oft beschränkten Wahrnehmung / Messung der Realität schwerer möglich ist.
Prüfstandsversuch
- Kinematik, Elastokinematik
- Federung
- Aufbauträgheitsmomente, Schwerpunktslage
- Aerodynamische Beiwerte (Windkanal)
- Komponentenerprobung (Bauteilbelastung, Festigkeit)
Messmittel, Messgrößen
Die im Fahrversuch benutzten Messgrößen sind typischerweise
- Lenkradwinkel, Lenkradmoment
- Beschleunigungen
- Winkelgeschwindigkeiten
- Geschwindigkeit – Optisch/Radar/Laufrad (auch 2-achsig zur Bestimmung des Schwimmwinkels)
- Optische Abstandssensoren
- GPS / DGPS basierte Messsysteme (Positionsmessung)
- Inertiales Navigationssystem, oft bezeichnet als Kreiselplattform (Erfassung aller translatorischen und rotatorischen Größen)
Die modernsten Kreiselplattformen werden als GPS/INS-Systeme ausgeführt. Hierbei werden mittels eines speziellen Reglers (Kalman-Filter) die Daten der beiden Systeme Kreiselplattform und GPS fusioniert, um die Vorteile von Satellitennavigation und Trägheitsnavigation für das Gesamtergebnis vorteilhaft zu nutzen. Dies erhöht u. a. die Verfügbarkeit und die Messgenauigkeit, und führt zu weiteren beobachtbaren Größen.
Je nach Aufgabenstellung kommen weitere Messgrößen hinzu, z. B. Bremsdrücke und Raddrehzahlen. Da die Fahrzeuge selbst über Sensoren verfügen, können diese Signale über den CAN-Bus abgegriffen werden.
Schienenfahrzeuge
Fahrzeitermittlung
Den analytisch-kinematischen Methoden zur Analyse der Fahrzeugbewegung auf der Schiene liegt die vereinfachende Annahme zu Grunde, dass die Fahrzeugform in einem masselosen Punkt konzentriert ist. Für daraus resultierende Bewegungsmodelle in Form von Differentialgleichungen wird dabei angenommen, dass die zugrunde liegenden Bewegungsformen stetig bzw. abschnittsweise stetig sind. Zur Berechnung wird weiter angenommen, dass der Ruck abschnittsweise konstant ist. Die Ruckänderung, das ist mathematisch die 4. Ableitung des Weges nach der Zeit, wird somit Null.[2]
Da die fahrdynamischen Verfahren zur Fahrzeitermittlung bereits seit sehr langer Zeit verwendet werden, haben sich folgende vier Verfahrenstypen herausgebildet:
- Allgemeine grafische Differentiations- und Integrationsverfahren, die allerdings relativ ungenau sind und heute nicht mehr eingesetzt werden,
- Spezielle grafische Ermittlungsverfahren der Fahrdynamik, in diese Gruppe gehören z. B. die Fahrzeitermittlungsverfahren nach Strahl, Müller und Unrein.[2] Hierzu gehört ebenfalls der „Fahrdiagraph“ von Udo Knorr aus den 1920er Jahren. Alle diese Verfahren haben nur noch historische Bedeutung.
- Methoden des analytischen schrittweisen Differenzierens und Integrierens, auch als „Schrittverfahren“ (Zeitschritt-, Wegschritt-, Geschwindigkeitsschritt- und Beschleunigungsschrittverfahren) bezeichnet. Diese Methoden, die in Form des „Zeitschrittverfahrens“ auch den kleinsten methodischen Fehler beinhalten,[2] eignen sich sehr gut für Simulationen des Bewegungsablaufes.
- Methoden des Differenzierens oder Integrierens einer geschlossenen Funktion des Bewegungsvorgangs. Diese sind für die Berechnung einzelner Bewegungsphasen verwendbar und bereits auf einem Taschenrechner ausführbar, allerdings ist Voraussetzung, dass mindestens eine der benötigten Größen als geschlossen integrier- oder differenzierbare Funktion dargestellt werden kann.[2]
Dynamik
Die Gestaltung der Radsätze, Aufhängung, Federung und Dämpfung der Drehgestelle und weitere Effekte sind Gegenstand der Fahrdynamik von Schienenfahrzeugen. Die Kraftentstehung in der Kontaktzone Rad/Schiene spielt hier eine entscheidende Rolle. Die Kenntnis dieser Zusammenhänge ermöglicht die Analyse dynamischer Vorgänge, z. B. dem Sinuslauf.
Siehe auch
- Die Komponenten des Fahrwiderstandes und die Abschätzung der erforderlichen Antriebsleistung
- Zusammenhang zwischen dem Kammschen Reibungskreis und der Haftung Reifen/Fahrbahn
- Verschiedene Allradkonzepte: Allradantrieb, Quattro, Syncro
- Antriebsschlupfregelung, Sperrdifferential und Active Yaw zur Beeinflussung der Fahrdynamik
- Die Sicherheitssysteme ABS, ESP, Aktivlenkung, Dynamiklenkung
Literatur
- Transpress-Lexikon Transport. Transpress VEB Verlag für Verkehrswesen, Berlin 1980.
- Dietrich Wende: Fahrdynamik. Transpress VEB Verlag für Verkehrswesen, Berlin 1983.
- Manfred Mitschke, Henning Wallentowitz: Dynamik der Kraftfahrzeuge. Springer, Berlin 2004, ISBN 3-540-42011-8.
- Georg Rill: Simulation von Kraftfahrzeugen. 2007 (online [PDF; abgerufen am 4. September 2011]).
- Bernd Heißing, Metin Ersoy, Stefan Gies: Fahrwerkhandbuch: Grundlagen, Fahrdynamik, Komponenten, Systeme, Mechatronik, Perspektiven. Vieweg / Springer Vieweg 2007, 2008, 2011, 2013. Kapitel 2: Fahrdynamik (online, 7 MB, 119 S.)[3]
- Klaus Knothe, Sebastian Stichel: Schienenfahrzeugdynamik. Springer, 2003, ISBN 978-3-642-62814-6.
Weblinks
Fußnoten
- Bernhard Heißing, Metin Ersoy, Stefan Gies (Hrsg.): Fahrwerkhandbuch: Grundlagen, Fahrdynamik, Komponenten, Systeme, Mechatronik, Perspektiven. 3. Auflage. Vieweg+Teubner, 2011, ISBN 978-3-8348-0821-9, S. 125–129 (eingeschränkte Vorschau in der Google-Buchsuche).
- Dietrich Wende: Fahrdynamik. Transpress VEB Verlag für Verkehrswesen, Berlin 1983, S. 15.
- Inhaltsverzeichnis (PDF; 103 kB), Vorwort (pdf)