Raum (Mathematik)
Ein Raum ist in der Mathematik eine Menge mathematischer Objekte mit einer Struktur. Diese kann auf den der abgebildeten Sache zugrundeliegenden Strukturen und/oder einer zusätzlichen mathematischen Struktur beruhen. Als zentrales Beispiel besteht ein Vektorraum aus einer Menge von Objekten, genannt Vektoren, die addiert oder mit einem Skalar (etwa einer Zahl) multipliziert werden können, sodass das Ergebnis wieder ein Vektor desselben Vektorraums ist und das Assoziativ- sowie die Distributivgesetze gelten. Als mathematische Objekte können dabei beispielsweise reelle oder komplexe Zahlen, Zahlentupel, Matrizen oder Funktionen dienen.
Der Begriff „Raum“ hat sich in der Mathematik im Laufe der Zeit stark gewandelt. Während in der klassischen Mathematik unter Raum der dreidimensionale Anschauungsraum verstanden wird, dessen geometrische Eigenschaften vollständig durch Axiome definiert werden, sind Räume in der modernen Mathematik lediglich abstrakte mathematische Strukturen, die auf unterschiedlichen Konzepten des Begriffs der Dimension basieren und deren Eigenschaften nicht vollständig durch Axiome definiert werden. Einen ähnlichen Wandel hat seit dem 20. Jahrhundert auch der Begriff des Raumes in der Physik erlebt.
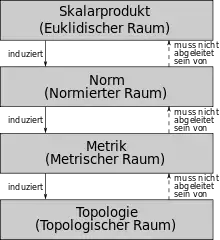
Mathematische Räume lassen sich auf verschiedenen Ebenen klassifizieren, etwa nach Vergleichbarkeit, nach Unterscheidbarkeit und nach Isomorphie. Räume bilden oft eine Hierarchie, das heißt, ein Raum erbt alle Eigenschaften eines übergeordneten Raums. Beispielsweise sind alle Skalarprodukträume auch normierte Räume, da das Skalarprodukt eine Norm (die Skalarproduktnorm) auf dem Skalarproduktraum induziert.
Räume werden heute in fast allen Bereichen der Mathematik eingesetzt, so beschäftigt sich etwa die lineare Algebra mit Vektorräumen, die Analysis mit Folgen- und Funktionenräumen, die Geometrie mit affinen und projektiven Räumen, die Topologie mit topologischen und uniformen Räumen, die Funktionalanalysis mit metrischen und normierten Räumen, die Differentialgeometrie mit Mannigfaltigkeiten, die Maßtheorie mit Mess- und Maßräumen und die Stochastik mit Wahrscheinlichkeitsräumen.
Geschichte
Vor dem goldenen Zeitalter der Geometrie
In der Mathematik des Altertums war der Begriff „Raum“ eine geometrische Abstraktion des im täglichen Leben beobachtbaren dreidimensionalen Raums. Seit Euklid (etwa 300 v. Chr.) sind axiomatische Methoden ein wichtiges Hilfsmittel der mathematischen Forschung. Durch René Descartes wurden 1637 kartesische Koordinaten eingeführt und damit die analytische Geometrie begründet.[1] Zu dieser Zeit wurden geometrische Lehrsätze als absolute Wahrheit angesehen, die durch Intuition und logisches Denken ähnlich wie die Naturgesetze erkannt werden konnten,[2] und Axiome wurden als offensichtliche Folgerungen der Definitionen angesehen.[3]
Zwischen geometrischen Figuren wurden zwei Äquivalenzrelationen verwendet: Kongruenz und Ähnlichkeit. Translationen, Rotationen und Spiegelungen bilden eine Figur in kongruente Figuren ab und Homothetien in ähnliche Figuren. Beispielsweise sind alle Kreise zueinander ähnlich, Ellipsen zu Kreisen jedoch nicht. Eine dritte Äquivalenzrelation, die 1795 in der projektiven Geometrie durch Gaspard Monge eingeführt wurde, entspricht projektiven Transformationen. Unter solchen Transformationen können nicht nur Ellipsen, sondern auch Parabeln und Hyperbeln in Kreise abgebildet werden; im projektiven Sinn sind alle diese Figuren äquivalent.
Diese Bezüge zwischen der euklidischen und der projektiven Geometrie zeigen,[4] dass mathematische Objekte nicht zusammen mit ihrer Struktur gegeben sind.[5] Vielmehr beschreibt jede mathematische Theorie ihre Objekte durch manche ihrer Eigenschaften, und zwar genau diejenigen, die durch Axiome bei der Grundlage der Theorie formuliert wurden.[6] Abstände und Winkel werden in den Axiomen der projektiven Geometrie nicht erwähnt, deshalb können sie in ihren Sätzen nicht auftauchen. Die Frage „was ist die Summe der drei Winkel eines Dreiecks“ hat nur in der euklidischen Geometrie eine Bedeutung, in der projektiven Geometrie ist sie aber gegenstandslos.
Im 19. Jahrhundert trat eine neue Situation auf: in manchen Geometrien ist die Summe der drei Winkel eines Dreiecks wohldefiniert, aber unterschiedlich zum klassischen Wert (180 Grad). In der nichteuklidischen hyperbolischen Geometrie, die 1829 durch Nikolai Lobatschewski und 1832 durch János Bolyai (sowie, unpubliziert, 1816 durch Carl Friedrich Gauß[4]) eingeführt wurde, hängt diese Summe vom Dreieck ab und ist immer kleiner als 180 Grad. Eugenio Beltrami und Felix Klein leiteten 1868 bzw. 1871 euklidische Modelle der hyperbolischen Geometrie her, und rechtfertigten damit diese Theorie.[7] Ein euklidisches Modell einer nichteuklidischen Geometrie ist eine geschickte Wahl von Objekten im euklidischen Raum und Relationen zwischen diesen Objekten, die alle Axiome und damit alle Sätze der nichteuklidischen Geometrie erfüllen. Die Beziehungen dieser ausgewählten Objekte des euklidischen Modells imitieren die nichteuklidischen Beziehungen. Dies zeigt, dass in der Mathematik die Beziehungen zwischen den Objekten, nicht die Objekte selbst, von essenzieller Bedeutung sind.
Diese Entdeckung erzwang die Abkehr vom Anspruch der absoluten Wahrheit der euklidischen Geometrie. Sie zeigte, dass die Axiome weder offensichtlich, noch Folgerungen von Definitionen sind; vielmehr sind sie Hypothesen. Die wichtige physikalische Fragestellung, inwieweit diese der experimentellen Realität entsprechen, hat nichts mehr mit Mathematik zu tun. Selbst wenn eine bestimmte Geometrie nicht mit der experimentellen Realität übereinstimmt, so bleiben ihre Sätze dennoch mathematische Wahrheiten.[3]
Das goldene Zeitalter und danach
Nicolas Bourbaki nennt die Zeit zwischen 1795 (deskriptive Geometrie von Monge) und 1872 (Erlanger Programm von Klein) das „goldene Zeitalter der Geometrie“. Die analytische Geometrie hatte große Fortschritte gemacht und konnte erfolgreich Sätze der klassischen Geometrie durch Rechnungen über Invarianten von Transformationsgruppen ersetzen.[8] Seit dieser Zeit interessieren neue Sätze der klassischen Geometrie eher Amateure als professionelle Mathematiker.[9] Dies bedeutet jedoch nicht, dass das Erbe der klassischen Geometrie verloren ging. Nach Bourbaki wurde „die klassische Geometrie in ihrer Rolle als autonome und lebendige Wissenschaft überholt und in der Folge in eine universelle Sprache der zeitgenössischen Mathematik umgewandelt“.[10]
Bernhard Riemann erklärte 1854 in seinem berühmten Habilitationsvortrag, dass jedes mathematische Objekt, das durch reelle Zahlen parametrisiert werden kann, als Punkt im -dimensionalen Raum aller solchen Objekte angesehen werden kann.[11] Heutzutage folgen Mathematiker routinemäßig dieser Idee und finden es sehr suggestiv, die Terminologie der klassischen Geometrie nahezu überall weiterzuverwenden.[10] Nach Hermann Hankel (1867) soll man, um die Allgemeingültigkeit dieses Ansatzes vollständig zu würdigen, die Mathematik als „reine Theorie der Formen, deren Zweck nicht die Kombination von Größen oder ihrer Bilder, der Zahlen, sondern von Gedankenobjekten ist“ ansehen.[5]

Ein Objekt, das durch komplexe Zahlen parametrisiert wird, kann als Punkt eines -dimensionalen komplexen Raums betrachtet werden. Das gleiche Objekt kann jedoch auch durch reelle Zahlen (die Real- und Imaginärteile der komplexen Zahlen) parametrisiert werden und daher als Punkt im -dimensionalen Raum angesehen werden. Die komplexe Dimension unterscheidet sich also von der reellen Dimension. Das Konzept von Dimension ist jedoch noch erheblich vielschichtiger. Das algebraische Konzept von Dimension bezieht sich auf Vektorräume, das topologische Konzept von Dimension auf topologische Räume. Für metrische Räume gibt es auch die Hausdorff-Dimension, die speziell für Fraktale nicht-ganzzahlig sein kann. Funktionenräume sind üblicherweise unendlichdimensional, wie bereits Riemann feststellte.[12] Manche Räume, beispielsweise Maßräume, erlauben überhaupt kein Konzept einer Dimension.

Der ursprünglich von Euklid untersuchte Raum heißt heute dreidimensionaler euklidischer Raum. Seine Axiomatisierung, begonnen von Euklid vor 23 Jahrhunderten, wurde im 20. Jahrhundert durch David Hilbert, Alfred Tarski und George Birkhoff abgeschlossen. Hilberts Axiomensystem beschreibt den Raum über nicht genauer definierte Primitive (wie „Punkt“, „zwischen“ oder „kongruent“), deren Eigenschaften durch eine Reihe von Axiomen eingegrenzt werden. Eine solche Definition von Grund auf ist heutzutage nur von geringem Nutzen, da sie nicht den Bezug dieses Raumes zu anderen Räumen aufzeigt. Der moderne Zugang definiert den dreidimensionalen euklidischen Raum eher algebraisch über Vektorräume und quadratische Formen als affinen Raum, dessen Differenzraum ein dreidimensionaler Skalarproduktraum ist.
Ein Raum besteht heute aus ausgewählten mathematischen Objekten (beispielsweise Funktionen zwischen anderen Räumen, Teilräume eines anderen Raums, oder auch nur den Elementen einer Menge), die als Punkte behandelt werden, sowie aus bestimmten Verknüpfungen zwischen diesen Punkten. Dies zeigt, dass Räume lediglich abstrakte mathematische Strukturen sind.
Systematik
Klassifikation
Räume können auf drei Ebenen klassifiziert werden. Nachdem jede mathematische Theorie ihre Objekte lediglich durch manche ihrer Eigenschaften definiert, ist die erste Frage, die man sich stellt: welche Eigenschaften?
Die höchste Ebene der Klassifikation unterscheidet Räume unterschiedlichen Typs. Beispielsweise sind euklidische und projektive Räume von unterschiedlichem Typ, nachdem der Abstand zweier Punkte in euklidischen Räumen definiert ist, in projektiven Räumen jedoch nicht. Als weiteres Beispiel ergibt die Frage „was ist die Summe der drei Winkel eines Dreiecks“ nur in einem euklidischen Raum, nicht aber in einem projektiven Raum einen Sinn. In nichteuklidischen Räumen ergibt diese Frage einen Sinn und wird nur anders beantwortet, was keine Unterscheidung auf höchster Ebene darstellt. Weiterhin ist die Unterscheidung zwischen einer euklidischen Ebene und einem dreidimensionalen euklidischen Raum keine Unterscheidung auf höchster Ebene, da die Frage „was ist die Dimension“ in beiden Fällen einen Sinn ergibt.[13]
Auf der zweiten Ebene der Klassifikation betrachtet man Antworten auf besonders wichtige Fragen, unter denjenigen, die auf der höchsten Ebene einen Sinn ergeben. Beispielsweise unterscheidet diese Ebene zwischen euklidischen und nichteuklidischen Räumen, zwischen endlichdimensionalen und unendlichdimensionalen Räumen, zwischen kompakten und nichtkompakten Räumen usw.
Auf der dritten Ebene der Klassifikation werden Antworten auf unterschiedlichste Fragen, die auf der höchsten Ebene einen Sinn ergeben, betrachtet. Beispielsweise unterscheidet diese Ebene zwischen Räumen unterschiedlicher Dimension, nicht aber zwischen einer Ebene des dreidimensionalen euklidischen Raums behandelt als zweidimensionaler euklidischer Raum und der Menge aller Paare reeller Zahlen ebenfalls behandelt als zweidimensionaler euklidischer Raum. Ebenso unterscheidet sie nicht zwischen verschiedenen euklidischen Modellen des gleichen nichteuklidischen Raums. Formaler klassifiziert die dritte Ebene Räume bis auf Isomorphie. Ein Isomorphismus zwischen zwei Räumen ist eine Eins-zu-Eins-Korrespondenz zwischen den Punkten des ersten Raums und den Punkten des zweiten Raums, die alle Beziehungen zwischen den Punkten erhält. Wechselseitig isomorphe Räume werden als Kopien desselben Raums angesehen.
Der Begriff des Isomorphismus wirft Licht auf die höchste Ebene der Klassifikation. Ist eine Eins-zu-Eins-Korrespondenz zwischen zwei Räumen desselben Typs gegeben, dann kann man fragen, ob es sich um einen Isomorphismus handelt oder nicht. Diese Frage ergibt keinen Sinn für Räume unterschiedlichen Typs. Isomorphismen eines Raums auf sich selbst werden Automorphismen genannt. Automorphismen eines euklidischen Raums sind Verschiebungen und Spiegelungen. Der euklidische Raum ist homogen in dem Sinne, dass jeder Punkt des Raums durch einen bestimmten Automorphismus in jeden anderen Punkt des Raums transformiert werden kann.
Beziehungen zwischen Räumen
Topologische Begriffe (wie Stetigkeit, Konvergenz und offene oder abgeschlossene Mengen) sind auf natürliche Weise in jedem euklidischen Raum definiert. Mit anderen Worten ist jeder euklidische Raum auch ein topologischer Raum. Jeder Isomorphismus zwischen zwei euklidischen Räumen ist auch ein Isomorphismus zwischen den beiden topologischen Räumen (genannt Homöomorphismus), die umgekehrte Richtung ist aber falsch: ein Homöomorphismus kann Abstände deformieren. Nach Bourbaki ist die Struktur „topologischer Raum“ eine zugrunde liegende Struktur von „euklidischer Raum“.[13]
Die euklidischen Axiome lassen keine Freiheitsgrade über, sie bestimmen eindeutig alle geometrischen Eigenschaften des Raumes. Genauer gesagt sind alle dreidimensionalen euklidischen Räume wechselseitig isomorph. In diesem Sinne gibt es „den“ dreidimensionalen euklidischen Raum. Nach Bourbaki ist die entsprechende Theorie univalent. Im Gegensatz dazu sind topologische Räume generell nicht isomorph und ihre Theorie ist multivalent. Nach Bourbaki ist das Studium multivalenter Theorien das wichtigste Merkmal, das die moderne Mathematik von der klassischen Mathematik unterscheidet.[14]
Wichtige Räume
Vektorräume und topologische Räume
Vektorräume sind algebraischer Natur; es gibt reelle Vektorräume (über dem Körper der reellen Zahlen), komplexe Vektorräume (über dem Körper der komplexen Zahlen) und allgemeine Vektorräume über einem beliebigen Körper. Jeder komplexe Vektorraum ist auch ein reeller Vektorraum, letzterer Raum liegt also ersteren zugrunde, da jede reelle Zahl auch eine komplexe Zahl ist.[15] Lineare Operationen, die in einem Vektorraum per definitionem gegeben sind, führen zu Begriffen wie Gerade (auch Ebene und andere Untervektorräume), Parallele und Ellipse (auch Ellipsoid). Orthogonale Geraden können jedoch nicht definiert werden und Kreise können unter den Ellipsen nicht ausgesondert werden. Die Dimension eines Vektorraums ist als die maximale Zahl linear unabhängiger Vektoren oder, äquivalent dazu, als die minimale Zahl von Vektoren, die den Raum aufspannen, definiert; sie kann endlich oder unendlich sein. Zwei Vektorräume über demselben Körper sind genau dann isomorph, wenn sie die gleiche Dimension haben.
Topologische Räume sind analytischer Natur. Offene Mengen, die in topologischen Räumen per definitionem gegeben sind, führen zu Begriffen wie Stetigkeit, Weg, Grenzwert, Inneres, Rand und Äußeres. Jedoch bleiben Begriffe wie gleichmäßige Stetigkeit, Beschränktheit, Cauchy-Folge oder Differenzierbarkeit undefiniert. Isomorphismen zwischen topologischen Räumen werden traditionell Homöomorphismen genannt; sie sind Eins-zu-Eins-Korrespondenzen in beide Richtungen. Das offene Intervall ist homöomorph zur reellen Zahlengerade , aber nicht homöomorph zum geschlossenen Intervall oder zu einem Kreis. Die Oberfläche eines Würfels ist homöomorph zu einer Sphäre, aber nicht homöomorph zu einem Torus. Euklidische Räume unterschiedlicher Dimension sind nicht homöomorph, was einleuchtend aber schwierig zu beweisen ist.



Die Dimension eines topologischen Raums ist nicht leicht zu definieren; es werden die induktive Dimension und die Lebesgue’sche Überdeckungsdimension verwendet. Jede Teilmenge eines topologischen Raums ist selbst ein topologischer Raum (im Gegensatz dazu sind nur lineare Unterräume eines Vektorraums auch Vektorräume). Beliebige topologische Räume, die in der mengentheoretischen Topologie untersucht werden, sind für eine vollständige Klassifikation zu divers, sie sind im Allgemeinen inhomogen. Kompakte topologische Räume sind eine wichtige Klasse topologischer Räume, in denen jede stetige Funktion beschränkt ist. Das geschlossene Intervall und die erweiterte reelle Zahlengerade sind kompakt; das offene Intervall und die reelle Zahlengerade sind dies nicht. Die geometrische Topologie untersucht Mannigfaltigkeiten; dies sind topologische Räume, die lokal homöomorph zu euklidischen Räumen sind. Niedrigdimensionale Mannigfaltigkeiten sind bis auf Homöomorphie vollständig klassifiziert.

Die beiden Strukturen Vektorraum und topologischer Raum liegen der Struktur des topologischen Vektorraums zugrunde. Das heißt, ein topologischer Vektorraum ist sowohl ein reeller oder komplexer Vektorraum, als auch ein (sogar homogener) topologischer Raum. Jedoch sind beliebige Kombinationen dieser beiden Strukturen im Allgemeinen keine topologischen Vektorräume; die beiden Strukturen müssen konform sein, das heißt, die linearen Operationen müssen stetig sein.
Jeder endlichdimensionale reelle oder komplexe Vektorraum ist ein topologischer Vektorraum in dem Sinne, dass er genau eine Topologie trägt, die ihn zu einem topologischen Vektorraum macht. Die beiden Strukturen „endlichdimensionaler reeller oder komplexer Vektorraum“ und „endlichdimensionaler topologischer Vektorraum“ sind demnach äquivalent, liegen sich also gegenseitig zugrunde. Entsprechend ist jede invertierbare lineare Transformation eines endlichdimensionalen topologischen Vektorraums ein Homöomorphismus. In unendlicher Dimension sind jedoch zu einer gegebenen linearen Struktur verschiedene Topologien konform und invertierbare lineare Transformationen sind im Allgemeinen keine Homöomorphismen.
Affine und projektive Räume
Es ist günstig, affine und projektive Räume über Vektorräume wie folgt einzuführen. Ein -dimensionaler Untervektorraum eines -dimensionalen Vektorraums ist selbst ein -dimensionaler Vektorraum und als solches nicht homogen: er enthält mit dem Ursprung einen besonderen Punkt. Durch eine Verschiebung um einen nicht in diesem Untervektorraum liegenden Vektor erhält man einen -dimensionalen affinen Raum, der homogen ist. In den Worten von John Baez ist „ein affiner Raum ein Vektorraum, der seinen Ursprung vergessen hat“. Eine Gerade in einem affinen Raum ist, per definitionem, ihr Schnitt mit einem zweidimensionalen linearen Teilraum (einer Ebene durch den Ursprung) des -dimensionalen Vektorraums. Jeder Vektorraum ist auch ein affiner Raum.

Jeder Punkt eines affinen Raums ist sein Schnitt mit einem eindimensionalen Untervektorraum (einer Gerade durch den Ursprung) des -dimensionalen Vektorraums. Manche eindimensionalen Unterräume sind jedoch parallel zu dem affinen Raum, auf gewisse Weise schneiden sie sich im Unendlichen. Die Menge aller eindimensionalen Untervektorräume eines -dimensionalen Vektorraums ist, per definitionem, ein -dimensionaler projektiver Raum. Wählt man einen -dimensionalen affinen Raum wie zuvor, dann beobachtet man, dass der affine Raum als echte Teilmenge in den projektiven Raum eingebettet ist. Der projektive Raum selbst ist jedoch homogen. Eine Gerade in dem projektiven Raum entspricht, per definitionem, einem zweidimensionalen Untervektorraum des -dimensionalen Vektorraums.
Die auf diese Weise definierten affinen und projektiven Räume sind algebraischer Natur. Sie können reell, komplex oder allgemein über einem beliebigen Körper definiert sein. Jeder reelle (oder komplexe) affine oder projektive Raum ist auch ein topologischer Raum. Ein affiner Raum ist eine nicht-kompakte Mannigfaltigkeit, ein projektiver Raum ist eine kompakte Mannigfaltigkeit.
Metrische und uniforme Räume
In einem metrischen Raum werden Abstände zwischen Punkten definiert. Jeder metrische Raum ist auch ein topologischer Raum. In einem metrischen Raum (aber nicht direkt in einem topologischen Raum) sind beschränkte Mengen und Cauchy-Folgen definiert. Isomorphismen zwischen metrischen Räumen heißen Isometrien. Ein metrischer Raum heißt vollständig, falls alle Cauchy-Folgen konvergieren. Jeder nicht vollständige Raum ist isometrisch in seine Vervollständigung eingebettet. Jeder kompakte metrische Raum ist vollständig; die reelle Zahlengerade ist nicht kompakt aber vollständig; das offene Intervall ist nicht vollständig.
Ein topologischer Raum heißt metrisierbar, falls er einem metrischen Raum zugrunde liegt. Alle Mannigfaltigkeiten sind metrisierbar. Jeder euklidische Raum ist auch ein vollständiger metrischer Raum. Zudem können alle geometrischen Begriffe, die für einen euklidischen Raum wesentlich sind, über seine Metrik definiert werden. Beispielsweise besteht die Strecke zwischen zwei Punkten und aus allen Punkten , sodass der Abstand zwischen und gleich der Summe der Abstände zwischen und sowie und ist.



Uniforme Räume erlauben es zwar nicht Abstände einzuführen, aber trotzdem Begriffe wie gleichmäßige Stetigkeit, Cauchy-Folgen, Vollständigkeit und Vervollständigung zu definieren. Jeder uniforme Raum ist auch ein topologischer Raum. Jeder topologische Vektorraum (egal ob metrisierbar oder nicht) ist auch ein uniformer Raum. Allgemeiner ist jede kommutative topologische Gruppe ein uniformer Raum. Eine nichtkommutative topologische Gruppe trägt jedoch zwei uniforme Strukturen, eine links-invariante und eine rechts-invariante. Topologische Vektorräume sind in endlichen Dimensionen vollständig, in unendlichen Dimensionen im Allgemeinen aber nicht.
Normierte Räume und Skalarprodukträume
Die Vektoren in einem euklidischen Raum bilden einen Vektorraum, aber jeder Vektor besitzt auch eine Länge, in anderen Worten eine Norm. Ein reeller oder komplexer Vektorraum mit Norm heißt normierter Raum. Jeder normierte Raum ist sowohl ein topologischer Vektorraum als auch ein metrischer Raum. Die Menge der Vektoren mit Norm kleiner als eins wird Einheitskugel des normierten Raums genannt. Sie ist eine konvexe und zentralsymmetrische Menge, im Allgemeinen aber kein Ellipsoid, beispielsweise kann sie auch ein konvexer Polyeder sein. Die Parallelogrammgleichung ist in normierten Räumen im Allgemeinen nicht erfüllt, sie gilt aber für Vektoren in euklidischen Räumen, was daraus folgt, dass das Quadrat der euklidischen Norm eines Vektors dem Skalarprodukt mit sich selbst entspricht. Ein Banachraum ist ein vollständiger normierter Raum. Viele Folgen- oder Funktionenräume sind unendlichdimensionale Banachräume.
Ein Skalarproduktraum ist ein reeller oder komplexer Vektorraum, der mit einer Bilinear- oder Sesquilinearform ausgestattet ist, die gewisse Bedingungen erfüllen muss und demnach Skalarprodukt genannt wird. In einem Skalarproduktraum sind auch Winkel zwischen Vektoren definiert. Jeder Skalarproduktraum ist auch ein normierter Raum. Ein normierter Raum liegt einem Skalarproduktraum genau dann zugrunde, wenn in ihm die Parallelogrammgleichung erfüllt ist oder, äquivalent dazu, wenn seine Einheitskugel ein Ellipsoid ist. Alle -dimensionalen reellen Skalarprodukträume sind wechselseitig isomorph. Man kann sagen, dass der -dimensionale euklidische Raum ein -dimensionaler reeller Skalarproduktraum ist, der seinen Ursprung vergessen hat. Ein Hilbertraum ist ein vollständiger Skalarproduktraum. Einige Folgen- und Funktionenräume sind unendlichdimensionale Hilberträume. Hilberträume sind für die Quantenmechanik sehr wichtig.
Differenzierbare und Riemannsche Mannigfaltigkeiten
Differenzierbare Mannigfaltigkeiten werden selten als Räume bezeichnet, können aber als solche aufgefasst werden. Glatte (differenzierbare) Funktionen, Kurven und Karten, die in einer differenzierbaren Mannigfaltigkeit per definitionem gegeben sind, führen zu Tangentialräumen. Jede differenzierbare Mannigfaltigkeit ist eine (topologische) Mannigfaltigkeit. Glatte Flächen in einem endlichdimensionalen Vektorraum, wie etwa die Oberfläche eines Ellipsoids, nicht aber die eines Polytops, sind differenzierbare Mannigfaltigkeiten. Jede differenzierbare Mannigfaltigkeit kann in einen endlichdimensionalen Vektorraum eingebettet werden. Eine glatte Kurve in einer differenzierbaren Mannigfaltigkeit hat an jedem Punkt einen Tangentialvektor, die zum Tangentialraum an diesem Punkt gehört. Der Tangentialraum einer -dimensionalen differenzierbaren Mannigfaltigkeit ist ein -dimensionaler Vektorraum. Eine glatte Funktion besitzt an jedem Punkt ein Differential, also ein lineares Funktional auf dem Tangentialraum. Reelle oder komplexe endlichdimensionale Vektorräume, affine Räume und projektive Räume sind alles ebenfalls differenzierbare Mannigfaltigkeiten.
Eine Riemannsche Mannigfaltigkeit oder ein Riemannscher Raum ist eine differenzierbare Mannigfaltigkeit, deren Tangentialraum mit einem metrischen Tensor ausgestattet ist. Euklidische Räume, glatte Flächen in euklidischen Räumen und hyperbolische nichteuklidische Räume sind auch Riemannsche Räume. Eine Kurve in einem Riemannschen Raum hat eine Länge. Ein Riemannscher Raum ist sowohl eine differenzierbare Mannigfaltigkeit, als auch ein metrischer Raum, wobei der Abstand der Länge der kürzesten Kurve entspricht. Der Winkel zwischen zwei Kurven, die sich an einem Punkt schneiden, ist der Winkel zwischen ihren Tangentialvektoren. Verzichtet man auf die Positivität des Skalarprodukts auf dem Tangentialraum erhält man pseudo-riemannsche (und insbesondere lorentzsche) Mannigfaltigkeiten, die wichtig für die allgemeine Relativitätstheorie sind.
Messräume, Maßräume und Wahrscheinlichkeitsräume
Verzichtet man auf Abstände und Winkel, behält jedoch das Volumen geometrischer Körper bei, gelangt man in das Gebiet der Maßtheorie. Ein geometrischer Körper ist in der klassischen Mathematik sehr viel regulärer als einfach nur eine Menge von Punkten. Der Rand eines geometrischen Körpers hat das Volumen null, daher ist das Volumen des Körpers gleich dem Volumen seines Inneren, und das Innere kann durch eine unendliche Folge von Würfeln ausgeschöpft werden. Im Gegensatz dazu kann der Rand einer beliebigen Menge ein Volumen ungleich null besitzen, wie beispielsweise die Menge aller rationalen Punkte innerhalb eines gegebenen Würfels. Der Maßtheorie gelang es, den Begriff des Volumens (oder eines anderen Maßes) auf eine enorm große Klasse von Mengen auszudehnen, die sogenannten messbaren Mengen. In vielen Fällen ist es jedoch unmöglich, allen Mengen ein Maß zuzuordnen (siehe Maßproblem). Die messbaren Mengen bilden dabei eine σ-Algebra. Mit Hilfen von messbaren Mengen lassen sich messbare Funktionen zwischen Messräumen definieren.
Um einen topologischen Raum zu einem Messraum zu machen, muss man ihn mit einer σ-Algebra ausstatten. Die σ-Algebra der Borel-Mengen ist die verbreitetste, aber nicht die einzige Wahl. Alternativ kann eine σ-Algebra auch durch eine gegebene Familie von Mengen oder Funktionen erzeugt werden, ohne irgendeine Topologie in Betracht zu ziehen. Häufig führen verschiedene Topologien zur gleichen σ-Algebra, wie beispielsweise die Normtopologie und schwache Topologie auf einem separablen Hilbertraum. Jede Teilmenge eines Messraums ist selbst wieder ein Messraum. Standardmessräume, auch Standard-Borel-Räume genannt, sind besonders nützlich. Jede Borel-Menge, also insbesondere jede abgeschlossene und jede offene Menge in einem euklidischen Raum und allgemeiner in einem vollständigen separablen metrischen Raum (einem sog. polnischen Raum) ist ein Standardmessraum. Alle überabzählbaren Standardmessräume sind zueinander isomorph.
Ein Maßraum ist ein Messraum, der mit einem Maß versehen ist. Ein euklidischer Raum mit dem Lebesgue-Maß ist beispielsweise ein Maßraum. In der Integrationstheorie werden Integrierbarkeit und Integrale messbarer Funktionen auf Maßräumen definiert. Mengen vom Maß null werden Nullmengen genannt. Nullmengen und Teilmengen von Nullmengen treten in Anwendungen oft als vernachlässigbare Ausnahmemengen in Erscheinung: Man spricht etwa davon, dass eine Eigenschaft fast überall gilt, wenn sie im Komplement einer Nullmenge gilt. Ein Maßraum, in dem alle Teilmengen von Nullmengen messbar sind, heißt vollständig.
Ein Wahrscheinlichkeitsraum ist ein Maßraum, bei dem das Maß des ganzen Raums gleich 1 ist. In der Wahrscheinlichkeitstheorie werden für die verwendeten maßtheoretischen Begriffe meist eigene Bezeichnungen verwendet, die der Beschreibung von Zufallsexperimenten angepasst sind: Messbare Mengen werden Ereignisse und messbare Funktionen zwischen Wahrscheinlichkeitsräumen werden Zufallsvariable genannt; ihre Integrale sind Erwartungswerte. Das Produkt einer endlichen oder unendlichen Familie von Wahrscheinlichkeitsräumen ist wieder ein Wahrscheinlichkeitsraum. Im Gegensatz dazu ist für allgemeine Maßräume nur das Produkt endlich vieler Räume definiert. Dementsprechend gibt es zahlreiche unendlichdimensionale Wahrscheinlichkeitsmaße, beispielsweise die Normalverteilung, aber kein unendlichdimensionales Lebesgue-Maß.
Diese Räume sind weniger geometrisch. Insbesondere lässt sich die Idee der Dimension, wie sie in der einen oder anderen Form auf alle anderen Räume anwendbar ist, nicht auf Messräume, Maßräume und Wahrscheinlichkeitsräume anwenden.
Literatur
- Kiyosi Itô: Encyclopedic dictionary of mathematics. 2. Auflage. Mathematical society of Japan (Original), MIT press (engl. Übersetzung), 1993 (englisch).
- Timothy Gowers, June Barrow-Green, Imre Leader: The Princeton Companion to Mathematics. Princeton University Press, 2008, ISBN 978-0-691-11880-2 (englisch).
- Nicolas Bourbaki: Elements of mathematics. Hermann (Original), Addison-Wesley (engl. Übersetzung) – (französisch).
- Nicolas Bourbaki: Elements of the history of mathematics. Masson (Original), Springer (engl. Übersetzung), 1994 (französisch).
- Nicolas Bourbaki: Elements of mathematics: Theory of sets. Hermann (Original), Addison-Wesley (engl. Übersetzung), 1968 (französisch).
- Space. In: Michiel Hazewinkel (Hrsg.): Encyclopedia of Mathematics. Springer-Verlag und EMS Press, Berlin 2002, ISBN 978-1-55608-010-4 (englisch, online).
Einzelnachweise und Anmerkungen
- K. Itô: Encyclopedic dictionary of mathematics. 1993, S. 987.
- N. Bourbaki: Elements of the history of mathematics. 1994, S. 11.
- N. Bourbaki: Elements of the history of mathematics. 1994, S. 15.
- N. Bourbaki: Elements of the history of mathematics. 1994, S. 133.
- N. Bourbaki: Elements of the history of mathematics. 1994, S. 21.
- N. Bourbaki: Elements of the history of mathematics. 1994, S. 20.
- N. Bourbaki: Elements of the history of mathematics. 1994, S. 24.
- N. Bourbaki: Elements of the history of mathematics. 1994, S. 134–135.
- N. Bourbaki: Elements of the history of mathematics. 1994, S. 136.
- N. Bourbaki: Elements of the history of mathematics. 1994, S. 138.
- N. Bourbaki: Elements of the history of mathematics. 1994, S. 140.
- N. Bourbaki: Elements of the history of mathematics. 1994, S. 141.
- N. Bourbaki: Elements of mathematics: Theory of sets. 1968, Kapitel IV.
- N. Bourbaki: Elements of mathematics: Theory of sets. 1968, S. 385.
- Beispielsweise kann die Gaußsche Zahlenebene behandelt als eindimensionaler Vektorraum zu einem zweidimensionalen reellen Vektorraum abgestuft werden. Im Gegensatz dazu kann die reelle Zahlengerade zwar als eindimensionaler reeller Vektorraum, aber nicht als eindimensionaler komplexer Vektorraum behandelt werden. Siehe auch Körpererweiterung.