Euklidischer Raum
In der Mathematik ist der euklidische Raum zunächst der „Raum unserer Anschauung“ („Anschauungsraum“), wie er in Euklids Elementen durch Axiome und Postulate beschrieben wird (vgl. euklidische Geometrie). Bis ins 19. Jahrhundert wurde davon ausgegangen, dass dadurch der uns umgebende physikalische Raum beschrieben wird. Der Zusatz „euklidisch“ wurde nötig, nachdem in der Mathematik allgemeinere Raumkonzepte (z. B. hyperbolischer Raum, riemannsche Mannigfaltigkeiten) entwickelt wurden und es sich im Rahmen der speziellen und allgemeinen Relativitätstheorie zeigte, dass zur Beschreibung des Raums in der Physik andere Raumbegriffe benötigt werden (Minkowski-Raum, Lorentz-Mannigfaltigkeit).
Im Laufe der Zeit wurde Euklids Geometrie auf verschiedene Arten präzisiert und verallgemeinert:
- axiomatisch durch Hilbert (siehe Hilberts Axiomensystem der euklidischen Geometrie),
- als euklidischer Vektorraum (einem über definierten Vektorraum mit Skalarprodukt),
- als euklidischer Punktraum (einem affinen Raum, der über einem euklidischen Vektorraum modelliert ist),
- als Koordinatenraum mit dem Standardskalarprodukt.


Wenn vom euklidischen Raum die Rede ist, dann kann jede dieser Definitionen gemeint sein oder auch eine höherdimensionale Verallgemeinerung. Den zweidimensionalen euklidischen Raum nennt man auch euklidische Ebene. In diesem zweidimensionalen Fall wird der Begriff in der synthetischen Geometrie etwas allgemeiner gefasst: Euklidische Ebenen können dort als affine Ebenen über einer allgemeineren Klasse von Körpern, den euklidischen Körpern definiert werden. Diese Körper sind (je nach Auffassung) Teilkörper oder isomorph zu Teilkörpern von

Vom affinen Raum unterscheidet sich der euklidische dadurch, dass man Längen und Winkel messen kann. Man zeichnet deshalb die Abbildungen aus, die Längen und Winkel erhalten. Diese nennt man traditionell Kongruenzabbildungen, andere Bezeichnungen sind Bewegungen und Isometrien.
In den nichteuklidischen Räumen, so dem hyperbolischen und dem elliptischen Raum, gilt das Parallelenaxiom nicht.
Euklidische Vektorräume
Vom euklidischen Anschauungsraum zum euklidischen Vektorraum
In der analytischen Geometrie ordnet man dem euklidischen Raum einen Vektorraum zu. Eine Möglichkeit, dies zu tun, ist, die Menge der Parallelverschiebungen (Translationen) zu nehmen, versehen mit der Hintereinanderausführung als Addition. Jede Verschiebung lässt sich durch einen Pfeil beschreiben, der einen Punkt mit seinem Bildpunkt verbindet. Dabei beschreiben zwei Pfeile, die gleichsinnig parallel sind und die gleiche Länge haben, dieselbe Verschiebung. Man nennt zwei solche Pfeile äquivalent und nennt die Äquivalenzklassen Vektoren.
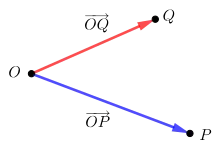
Wählt man im euklidischen Raum einen Punkt als Bezugspunkt (Ursprung) aus, so kann man jedem Punkt seinen Ortsvektor zuordnen, den Vektor, der durch einen Pfeil vom Ursprung zum Punkt dargestellt wird. Auf diese Art bekommt man eine Eins-zu-eins-Beziehung zwischen dem euklidischen Raum und dem zugehörigen euklidischen Vektorraum und kann so den ursprünglichen euklidischen Raum mit dem euklidischen Vektorraum identifizieren. Diese Identifizierung ist aber nicht kanonisch, sondern hängt von der Wahl des Ursprungs ab.



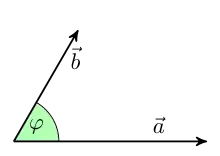
Man kann nun auch die Längen- und Winkelmessung aus dem euklidischen Raum auf Vektoren übertragen als Länge der zugehörigen Pfeile und Winkel zwischen solchen. Auf diese Art erhält man einen Vektorraum mit Skalarprodukt. Das Skalarprodukt ist dadurch charakterisiert, dass das Produkt eines Vektors mit sich selbst das Quadrat seiner Länge ergibt. Aus den Rechengesetzen für Skalarprodukte, den binomischen Formeln und dem Kosinussatz (angewandt auf ein Dreieck, dessen Seiten den Vektoren , und entsprechen) ergibt sich die Formel






- .

Hierbei bezeichnet den Winkel zwischen den Vektoren und .

Allgemeiner Begriff
Davon ausgehend nennt man jeden reellen Vektorraum mit Skalarprodukt (beliebiger endlicher Dimension ) einen euklidischen Vektorraum. Man benutzt dann obige Formel, um Länge (Norm) eines Vektors und Winkel zwischen Vektoren zu definieren. Zwei Vektoren sind dann orthogonal, wenn ihr Skalarprodukt null ergibt. Jeder dreidimensionale euklidische Vektorraum ist isometrisch isomorph zum Vektorraum der Pfeilklassen. Jeder -dimensionale euklidische Vektorraum ist isometrisch isomorph zum Koordinatenvektorraum (siehe unten). Euklidische Vektorräume derselben Dimension sind also nicht unterscheidbar. Dies berechtigt einen, jeden solchen als den euklidischen Vektorraum der Dimension zu bezeichnen. Manche Autoren benutzen den Begriff euklidischer Raum auch für unendlichdimensionale reelle Vektorräume mit Skalarprodukt, manche auch für komplexe Vektorräume mit Skalarprodukt, vgl. Skalarproduktraum.


Längen, Winkel, Orthogonalität und Orthonormalbasen
Sobald man einen reellen Vektorraum mit einem Skalarprodukt versehen hat, kann man die metrischen Begriffe des euklidischen Anschauungsraums auf diesen übertragen. Die Länge (die Norm, der Betrag) eines Vektors ist dann die Wurzel aus dem Skalarprodukt des Vektors mit sich selbst:
- .

Zwei Vektoren sind zueinander orthogonal (oder senkrecht), wenn ihr Skalarprodukt null ist:

- .

Den (nichtorientierten) Winkel zwischen zwei Vektoren definiert man mittels der obigen Formel
- ,
also
- .

Ein Vektor heißt Einheitsvektor, wenn er die Länge 1 hat. Eine Basis aus Einheitsvektoren, die paarweise orthogonal sind, heißt Orthonormalbasis. In jedem euklidischen Vektorraum existieren Orthonormalbasen. Ist eine Orthonormalbasis, so lässt sich der Vektor in dieser Basis darstellen:

- .

Die Koeffizienten erhält man durch
- .

Isometrien
Sind und zwei -dimensionale euklidische Vektorräume, so nennt man eine lineare Abbildung eine (lineare) Isometrie, wenn sie das Skalarprodukt erhält, wenn also




für alle gilt. Eine solche Abbildung wird auch orthogonale Abbildung genannt. Eine Isometrie erhält insbesondere Längen



und Winkel, also insbesondere Orthogonalität

Umgekehrt ist jede lineare Abbildung, die Längen erhält, eine Isometrie.
Eine Isometrie bildet jede Orthonormalbasis wieder auf eine Orthonormalbasis ab. Umgekehrt, wenn eine Orthonormalbasis von ist und eine Orthonormalbasis von , so gibt es genau eine Isometrie, die auf abbildet.



Daraus ergibt sich, dass zwei euklidische Vektorräume derselben Dimension isometrisch sind, also als euklidische Vektorräume nicht unterscheidbar sind.
Der euklidische Punktraum
Motivation
Euklidische Vektorräume dienen oft als Modelle für den euklidischen Raum. Die Elemente des Vektorraums werden dann je nach Kontext als Punkte oder Vektoren bezeichnet. Es wird nicht zwischen Punkten und ihren Ortsvektoren unterschieden. Rechnerisch kann dies von Vorteil sein. Begrifflich ist es jedoch unbefriedigend:
- Aus geometrischer Sicht sollten Punkte und Vektoren begrifflich unterschieden werden.
- Vektoren können addiert und mit Zahlen multipliziert werden, Punkte aber nicht.
- Punkte werden durch Vektoren verbunden bzw. ineinander übergeführt.
- Im Vektorraum gibt es ein ausgezeichnetes Element, den Nullvektor. In der euklidischen Geometrie sind aber alle Punkte gleichberechtigt.
Beschreibung
Abhilfe schafft das Konzept des euklidischen Punktraums. Dies ist ein affiner Raum über einem euklidischen Vektorraum. Hier unterscheidet man Punkte und Vektoren.
- Die Gesamtheit der Punkte bildet den euklidischen Punktraum. Dieser wird meist mit , , oder bezeichnet. (Das hochgestellte ist kein Exponent, sondern ein Index, der die Dimension kennzeichnet. ist also kein kartesisches Produkt.)
- Die Gesamtheit aller Vektoren bildet einen euklidischen Vektorraum .





- Zu je zwei Punkten und existiert genau ein Verbindungsvektor, der mit bezeichnet wird.
Der Verbindungsvektor eines Punktes mit sich selbst ist der Nullvektor: - Ein Punkt kann durch einen Vektor in eindeutiger Weise in einen Punkt übergeführt werden. Dieser wird oft mit bezeichnet. (Dies ist eine rein formale Schreibweise. Das Pluszeichen bezeichnet keine Vektorraumaddition, und auch keine Addition auf dem Punktraum.)
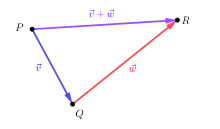
Der Nullvektor führt jeden Vektor in sich selbst über: - Führt der Vektor den Punkt in den Punkt über und der Vektor den Punkt in den Punkt , so führt den Punkt in den Punkt über. Dies kann wie folgt ausgedrückt werden:











In der Sprache der Algebra bedeuten diese Eigenschaften: Die additive Gruppe des Vektorraums operiert frei und transitiv auf der Menge .
Längen, Abstände und Winkel



Streckenlängen, Abstände zwischen Punkten, Winkel und Orthogonalität können nun mit Hilfe des Skalarprodukts von Vektoren definiert werden:
Die Länge der Strecke und den Abstand der Punkte und definiert man als die Länge des Vektors :




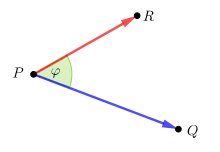
Die Größe des Winkels definiert man als den Winkel zwischen den Vektoren und :


Zwei Strecken und sind genau dann orthogonal, wenn die zugehörigen Vektoren und orthogonal sind.


Abbildungen
Längenerhaltende Abbildungen eines euklidischen Punktraums auf sich heißen Isometrien, Kongruenzabbildungen (in der ebenen Geometrie) oder Bewegungen. Sie erhalten automatisch auch Winkel. Ist eine Bewegung, so existiert eine orthogonale Abbildung (lineare Isometrie) , so dass für alle Punkte und gilt:



Der reelle Koordinatenraum
Definition
Der -dimensionale reelle Koordinatenraum ist das -fache kartesische Produkt der Menge der reellen Zahlen, also die Menge der -Tupel wobei die reelle Zahlen sind. Man bezeichnet die Elemente des je nach Kontext als Punkte oder als Vektoren, es wird also nicht zwischen Punkten und Vektoren unterschieden.


Als Vektoren werden sie komponentenweise addiert und mit reellen Zahlen multipliziert:


In diesem Fall werden die Elemente des oft als Spaltenvektoren (d. h. -Matrizen) geschrieben:


Das Skalarprodukt (Standardskalarprodukt) ist definiert durch
- .

Mit diesem Skalarprodukt ist der ein euklidischer Vektorraum.
Vom euklidischen Vektorraum/Punktraum zum Koordinatenraum
Wählt man in einem euklidischen Vektorraum eine Orthonormalbasis bzw. in einem euklidischen Punktraum ein kartesisches Koordinatensystem (d. h. einen Koordinatenursprung und eine Orthonormalbasis des Vektorraums), so wird dadurch jedem Vektor bzw. Punkt ein Koordinaten--Tupel zugeordnet. Auf diese Art erhält man eine Isometrie zwischen dem gegebenen euklidischen Raum und dem Koordinatenraum und kann diese vermöge dieser Isometrie miteinander identifizieren. Dies rechtfertigt es, den als den euklidischen Raum zu bezeichnen. Die Isometrie hängt jedoch von der Wahl der Orthonormalbasis und – im Fall des Punktraums – von der Wahl des Ursprungs ab.
Länge, Winkel, Orthogonalität, Standardbasis und Abstände
Die Länge oder Norm eines Vektors ist wie in jedem euklidischen Vektorraum durch die Quadratwurzel aus dem Skalarprodukt mit sich selbst gegeben:

Man nennt diese Norm auch euklidische Norm oder 2-Norm und schreibt statt auch oder .



Der Winkel zwischen zwei Vektoren und berechnet sich dann durch



Zwei Vektoren und sind genau dann orthogonal, , wenn


gilt. Die Vektoren der Standardbasis

sind Einheitsvektoren und paarweise orthogonal, bilden also eine Orthonormalbasis.
Fasst man die Elemente des als Punkte auf, so ist der Abstand zwischen den Punkten und als die Länge des Verbindungsvektors definiert:


Isometrien
Vektorraum-Isometrien (lineare Isometrien) des sind orthogonale Abbildungen, die durch orthogonale Matrizen dargestellt werden. Ist eine lineare Isometrie und ist


das Bild des -ten Standardbasisvektors (), so lässt sich mit Hilfe der Matrizenmultiplikation darstellen als



- .

Jede Isometrie (Bewegung) des Punktraums lässt sich in der Form

als Verknüpfung einer orthogonalen Abbildung und einer Parallelverschiebung (Translation) darstellen.


Orientierung
Jeder endlichdimensionale reelle Vektorraum kann durch die Wahl einer geordneten Basis mit einer Orientierung versehen werden. Während bei beliebigen euklidischen Vektor- und Punkträumen keine Orientierung ausgezeichnet ist, besitzt der Koordinatenraum eine kanonische Orientierung, die durch die Standardbasis gegeben ist: Die geordnete Basis aus den Vektoren ist positiv orientiert.

Eine geordnete Basis

ist genau dann positiv orientiert, wenn die aus ihr gebildete Determinante positiv ist:

Identifiziert man den (als euklidisch angenommenen) physikalischen Raum mit dem Koordinatenraum , indem man ein kartesisches Koordinatensystem einführt, so wählt man die Koordinatenachsen üblicherweise so, dass sie ein Rechtssystem bilden. Die durch die Rechte-Hand-Regel gegebene Orientierung des physikalischen Raums entspricht dann der kanonischen Orientierung des Koordinatenraums .
Der euklidische Raum in anderen Gebieten der Mathematik
Euklidische Räume in der Topologie
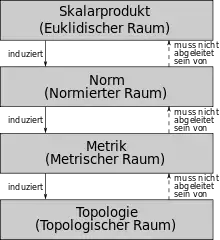
Die Funktion, die jedem Vektor seine durch das Skalarprodukt definierte Länge zuordnet, ist eine Norm. Man spricht von der durch das Skalarprodukt induzierten Norm oder der Skalarproduktnorm; manche Autoren nennen die Norm auch euklidische Norm. Die durch das Standardskalarprodukt auf induzierte Norm heißt euklidische Norm oder 2-Norm und ist ein Spezialfall der p-Normen. Durch die induzierte Norm wird jeder euklidische Vektorraum zu einem normierten Raum und dadurch zum klassischen Beispiel eines topologischen Vektorraums. Insbesondere ist er ein Prähilbertraum und, weil dieser im Endlichdimensionalen auch vollständig ist, ein Banachraum und somit auch ein Hilbertraum.
Durch die euklidische Abstandsfunktion wird jeder euklidische Raum zu einem metrischen Raum und damit insbesondere zu einem topologischen Raum.

Da auf endlichdimensionalen Vektorräumen alle Normen äquivalent sind, hängt die Topologie des euklidischen Raums in Wirklichkeit nicht von der euklidischen Struktur ab. Normierte Vektorräume derselben endlichen Dimension sind also alle zueinander homöomorph und damit homöomorph zum . Nach dem Satz von der Invarianz der Dimension von Luitzen E. J. Brouwer sind euklidische Räume verschiedener Dimension jedoch nicht homöomorph aufeinander abbildbar.
Als topologischer Raum ist der euklidische Raum zusammenhängend und zusammenziehbar.
Euklidische Räume in der Differentialtopologie
Mannigfaltigkeiten werden über euklidischen Räumen modelliert: Eine Mannigfaltigkeit ist lokal homöomorph zum . Durch die differenzierbare Struktur sind differenzierbare Mannigfaltigkeiten lokal diffeomorph zum . Insbesondere ist der euklidische Raum selbst eine differenzierbare Mannigfaltigkeit. Für alle Dimensionen außer Dimension vier ist eine zu homöomorphe differenzierbare Mannigfaltigkeit auch zu diffeomorph. Die in vier Dimensionen bestehenden Ausnahmen werden exotische 4-Räume genannt.
Euklidische Räume in der Differentialgeometrie
Durch das (nicht vom Punkt abhängige) Skalarprodukt wird der euklidische Raum zu einer riemannschen Mannigfaltigkeit. Umgekehrt wird in der riemannschen Geometrie jede riemannsche Mannigfaltigkeit, die isometrisch zum Vektorraum mit dem Standardskalarprodukt ist, als euklidischer Raum bezeichnet. Für diese riemannschen Mannigfaltigkeiten verschwindet der Krümmungstensor, das heißt, der Raum ist flach. Umgekehrt ist jede flache riemannsche Mannigfaltigkeit lokal isometrisch zum euklidischen Raum. Es kann sich allerdings auch um eine offene Teilmenge eines handeln oder um eine Mannigfaltigkeit, deren universelle Überlagerung eine Teilmenge des ist. Zweidimensionale Beispiele für den letzten Fall sind ein flacher Torus oder ein gerader Kreiszylinder. Hingegen ist jede vollständige und einfach zusammenhängende flache riemannsche Mannigfaltigkeit ein euklidischer Raum.
Literatur
- Marcel Berger: Geometry I. Aus dem Französischen von M. Cole und S. Levy. Universitext. Springer-Verlag, Berlin 1987, ISBN 3-540-11658-3.
- Marcel Berger: Geometry II. Aus dem Französischen von M. Cole und S. Levy. Universitext. Springer-Verlag, Berlin 1987, ISBN 3-540-17015-4.