Projektive Geometrie
Die projektive Geometrie ist ein Teilgebiet der Geometrie. Sie beruht auf der Projektion von Punkten, Geraden, Ebenen etc. Hervor ging die projektive Geometrie in der ersten Hälfte des 19. Jahrhunderts aus der perspektivischen Darstellung dreidimensionaler Gegenstände in der zweidimensionalen Ebene. Im Gegensatz zur „gewöhnlichen“ euklidischen Geometrie gibt es in der projektiven Geometrie keine Parallelen. Wesentliche Beiträge leisteten Jean Victor Poncelet 1822 und Karl Georg Christian von Staudt 1847.[1]
Die projektive Geometrie befasst sich, wie die affine Geometrie, mit Punkten, Geraden, Ebenen, Kurven und Flächen; allerdings ohne die Parallelität von Geraden. Es gibt also keine Parallelprojektionen, sondern nur Zentralprojektionen. Die zu untersuchenden Objekte liegen jetzt in einer projektiven Ebene oder einem projektiven Raum. Meistens befasst man sich mit Objekten in einem projektiven Raum über den reellen Zahlen oder den komplexen Zahlen , das heißt, die Koordinaten der Punkte sind reelle bzw. komplexe Zahlen. Nur in der axiomatischen projektiven Geometrie (s. u.) treten Koordinaten aus allgemeineren Strukturen (Körper, Schiefkörper, Ternärkörper, …) auf. Projektive Ebenen/Räume, in denen der Satz von Desargues gilt, lassen sich mit Hilfe von Vektorräumen über Schiefkörper noch gut beschreiben. Dies zeigt die große Bedeutung des Satzes von Desargues. Allerdings gilt er in mindestens 3-dimensionalen projektiven Räumen immer.


Die Bedeutung der projektiven Geometrie liegt auch darin, dass sich die Maßgeometrien, insbesondere die euklidische Geometrie und die nichteuklidischen Geometrien durch Spezialisierung aus ihr heraus entwickeln lassen.[2] Sie kann daher als eine Art Urgeometrie angesehen werden.
Der Einfachheit halber werden hier bis zum Abschnitt über axiomatische projektive Geometrie immer reelle Koordinaten vorausgesetzt.
Motivation
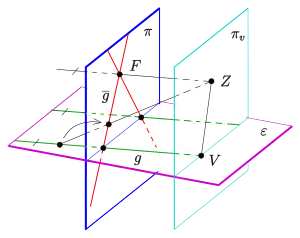
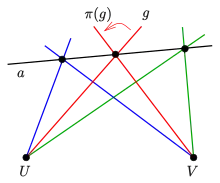
Eine Parallelprojektion einer Ebene auf eine andere erhält die Parallelität der Geraden. Bei einer Zentralprojektion (siehe Bild) ist dies i. A. nicht mehr der Fall. Im Bild werden die zwei grünen parallelen Geraden der horizontalen Ebene durch die Zentralprojektion mit Zentrum auf zwei sich im Punkt schneidende (rote) Geraden der senkrechten Ebene abgebildet. Der Punkt besitzt allerdings kein Urbild. Man nennt ihn den Fluchtpunkt der grünen Parallelenschar. Andererseits besitzt der Punkt (in der zu parallelen Ebene ) der Gerade kein Bild. Man nennt den Verschwindungspunkt der Gerade . Eine Zentralprojektion ist also keine Bijektion (1-1-Abbildung) der Ebene auf die Ebene . Der Ausweg aus diesem Dilemma: Man fügt in jeder Ebene jeder Parallelschar einen weiteren Punkt hinzu, so dass sich parallele Geraden schneiden. Diese neuen Punkte nennt man Fernpunkte und die Menge der Fernpunkte bildet die Ferngerade der jeweiligen Ebene. Im Bild wird dann der Fernpunkt der Gerade auf den Fluchtpunkt abgebildet. Der Verschwindungspunkt wird auf den Fernpunkt der (roten) Gerade abgebildet. Durch das Hinzufügen der Fernpunkte zu einer Ebene entsteht eine neue Inzidenzstruktur mit den typischen Eigenschaften








- Je zwei Punkte haben genau eine Verbindungsgerade und
- Je zwei Geraden haben genau einen Schnittpunkt.
Man nennt diese neue Struktur die reelle projektive Ebene.
Diese Art eine affine Ebene zu erweitern nennt man projektiv abschließen.
Dualitätsprinzip
Vertauscht man in den Inzidenzeigenschaften (1), (2) (s. o.) die Begriffe Gerade und Punkt, sowie Schneiden und Verbinden, so werden lediglich die Aussagen (1) und (2) vertauscht. Hat man also eine Aussage, die nur die Begriffe Gerade, Punkt, schneiden und verbinden verwendet, so gilt auch ihre duale Aussage. Zum Beispiel erhält man durch Dualisierung des Satzes von Pascal den Satz von Brianchon. Der Satz von Desargues ist gleich seiner dualen Aussage. Aber der duale Satz von Pappus ist eine weitere Aussage über projektive Ebenen.
Für affine Ebenen gilt das Dualitätsprinzip nicht.
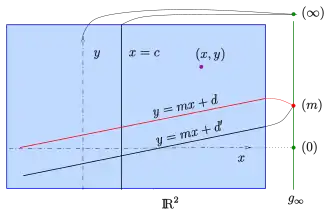
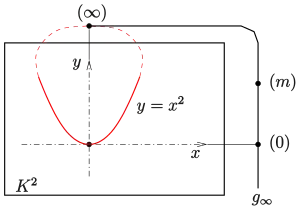
Inhomogene Koordinaten
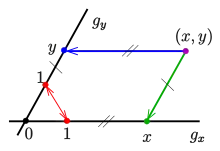
Um einem Punkt einer reellen projektiven Ebene Koordinaten zuzuordnen, beschreibt man einen endlichen Punkt (keinen Fernpunkt) in gewohnter Weise durch . Für den Fernpunkt der Gerade bietet sich die Steigung (einschließlich ) an (siehe Bild). Da ein Punkt entweder durch zwei Koordinaten oder durch eine Koordinate (Fernpunkt) beschrieben wird, nennt man diese Koordinaten inhomogene Koordinaten. Gegenüber den homogenen Koordinaten, haben inhomogene Koordinaten den großen Vorteil: Sie sind eindeutig und man kann im endlichen Bereich in gewohnter Weise rechnen.




Homogene Koordinaten
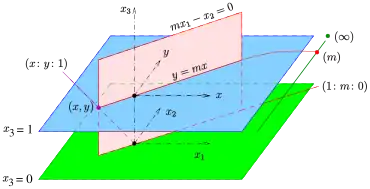
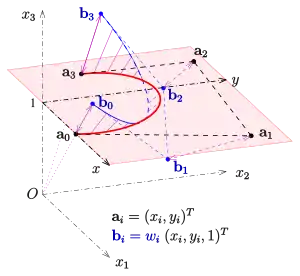
Dass die reelle projektive Ebene in ihrer inhomogenen Beschreibung nur formal eine inhomogene Struktur ist, zeigt ihre Beschreibung mit homogenen Koordinaten. Hierzu definiert man im

- jede Ursprungsgerade ist ein (projektiver) Punkt und
- jede Ursprungsebene ist eine (projektive) Gerade.
Ein Punkt inzidiert mit einer Gerade, wenn die dem Punkt entsprechende Ursprungsgerade in der der Geraden entsprechenden Ursprungsebene liegt. Man kann zeigen, dass die so definierte Inzidenzstruktur geometrisch zu dem oben definierten Modell der reellen projektiven Ebene äquivalent, isomorph, ist. Das Bild zeigt die Einbettung der endlichen Punkte des inhomogenen Modells der reellen projektiven Ebene in den als Ebene mit der Gleichung . Die Rolle der Ferngerade übernimmt die Ebene . Jede Ursprungsgerade dieser Ebene ist ein Fernpunkt. Das Bild zeigt die Zuordnung der Fernpunkte beider Modelle. Da ein vom Nullpunkt verschiedener Punkt eine Ursprungsgerade und damit einen Punkt der projektiven Ebene beschreibt, nennt man seine homogenen Koordinaten und




- bezeichnet den (projektiven) Punkt mit .

Da eine Ursprungsgerade aber durch jeden beliebigen vom Nullpunkt verschiedenen Punkt auf ihr beschrieben werden kann, gilt
- .

D. h., homogene Koordinaten beschreiben die Punkte der reellen projektiven Ebene nicht eindeutig. Dies ist ein Nachteil gegenüber inhomogenen Koordinaten. Eine Gerade (Ursprungsebene) wird im homogenen Modell durch eine Gleichung beschrieben.

Die Koordinaten endlicher Punkte (keine Fernpunkte) lassen sich umrechnen durch
- bzw.


Der große Vorteil der homogenen Koordinaten ist
- Jede inzidenzerhaltende Abbildung (Kollineation) wird durch eine lineare Abbildung (Matrix) beschrieben.
(Eine affine Abbildung ist eine Kombination aus einer linearen Abbildung und einer Verschiebung.)
Bettet man die x-y-Ebene so ein, dass sie im gleich der Ebene ist, so wird die Ursprungsebene zur Ferngerade. In diesem Fall sind die homogenen Koordinaten die baryzentrischen Koordinaten bezüglich des Dreiecks .



n-dimensionaler projektiver Raum
Die Beschreibung der reellen projektiven Ebene mit homogenen Koordinaten zeigt, dass man einen n-dimensionalen projektiven Raum analog im definieren kann:

- Die Punkte sind die Ursprungsgeraden des
- Die Geraden sind die Ursprungsebenen.
Für erhält man die projektive Gerade. Sie ist als Inzidenzstruktur zwar uninteressant, aber die auch hier definierte Gruppe der projektiven Permutationen ist als projektive lineare Gruppe interessant. Sie operiert im homogenen Modell auf den Ursprungsgeraden des als Matrizengruppe oder im inhomogenen Modell als gebrochen lineare Abbildungen . Eine wesentliche Eigenschaft ist:




- Die Gruppe operiert scharf 3-fach-transitiv, d. h. zu je zwei Punktetripeln gibt es genau eine Abbildung, die das eine auf das andere abbildet.
Kollineation, Zentralkollineation, Projektivität
- Kollineation
- Eine Kollineation einer projektiven Ebene ist eine bijektive Abbildung der Punktmenge auf sich, die kollineare Punkte auf kollineare Punkte abbildet. permutiert sowohl die Menge der Punkte als auch die Menge der Geraden.





- Zentralkollineation
Wichtige Kollineationen einer projektiven Ebene sind die Zentralkollineationen (auch Perspektivitäten genannt).
- Eine Zentralkollineation lässt einen Punkt, das Zentrum, und alle Geraden durch diesen Punkt fest.
Man kann nachweisen, dass es dann eine Gerade, die Achse, gibt, deren Punkte alle fix bleiben. Es kann allerdings vorkommen, dass das Zentrum auch auf der Achse liegt. In diesem Fall nennt man die Zentralkollineation Elation, andernfalls Homologie. Ist die Achse die Ferngerade, so ist eine Zentralprojektion im endlichen (affinen) Teil eine Punktstreckung oder eine Translation (Verschiebung).
- Projektivität
- Eine Hintereinanderausführung von mehreren Zentralkollineationen nennt man projektive Kollineation oder Projektivität.
Für die reelle projektive Ebene gilt
- (PR): Jede Kollineation ist eine projektive Kollineation und kann in homogenen Koordinaten durch eine lineare Abbildung beschrieben werden.
Beispiel
Die Translation wird in homogenen Koordinaten (s. o.) durch


und damit als lineare Abbildung mit der Matrix beschrieben.

Mehr Beispiele findet man in dem Artikel Homogene Koordinaten.
Die von den 3×3-Matrizen erzeugte projektive Kollineationsgruppe der reellen projektiven Ebene ist die projektive lineare Gruppe

Die Eigenschaft (PK) ist nicht allgemeingültig. So gibt es zum Beispiel in der komplexen projektiven Ebene Kollineationen, die nur als semilineare Abbildungen dargestellt werden können. Z. B.:

- Kollineation zwischen Inzidenzstrukturen
Eine projektive Ebene/Raum kann meistens mit wenigstens zwei Modellen (inhomogen, homogen) beschrieben werden. Um nachzuweisen, dass zwei Inzidenzstrukturen dieselbe Geometrie beschreiben, ist es nötig, eine bijektive Abbildung von auf anzugeben, die kollineare Punkte auf kollineare Punkte abbildet. D. h. man muss den Begriff Kollineation entsprechend erweitern. Im Allgemeinen ist



- eine Kollineation eine Abbildung von einer Inzidenzstruktur auf eine zweite, die Geraden auf Geraden abbildet.
Dualität, Polarität
- Eine bijektive Abbildung der Punkte einer projektiven Ebene auf die Menge der Geraden , die kollineare Punkte auf kopunktale Geraden abbildet und umgekehrt, heißt Dualität oder in älterer Literatur Korrelation[3] oder Reziprozität[4].

Eine Dualität ist also eine Kollineation einer projektiven Ebene auf ihre duale projektive Ebene.
Beispiel: Die Abbildung der reellen projektiven Ebene, die einem Punkt (in homogenen Koordinaten) die Ebene mit der Gleichung zuordnet und umgekehrt, ist eine Dualität.

Besondere Dualitäten sind Polaritäten:
- Eine Dualität heißt Polarität, wenn aus der Inzidenz von mit der Gerade folgt, dass auf liegt. heißt Polare von und Pol von .
- Eine Polarität ist immer involutorisch, d. h. Identität.





Die Dualität im obigen Beispiel ist eine Polarität.
- Gibt es bei einer Polarität Punkte, die auf ihrer Polaren liegen, so nennt man die Polarität hyperbolisch (z. B. Pol-Polare-Beziehung zu einem nicht ausgearteten Kegelschnitt), im anderen Fall elliptisch.
Das obige Beispiel einer Polarität ist elliptisch. Wesentlich hierfür ist allerdings, dass die zugrunde liegende projektive Ebene die reelle Ebene ist! Sind die Koordinaten komplexe Zahlen, ist die Polarität hyperbolisch, denn in diesem Fall hat die Gleichung nichttriviale Lösungen: z. B. liegt der Punkt auf seiner Polaren .



Doppelverhältnis
Bei projektiven Abbildungen in einem projektiven Raum ist das Teilverhältnis nicht mehr invariant (z. B.: Der Mittelpunkt einer Strecke geht nicht mehr in den Mittelpunkt der Bildstrecke über). Das Analogon zum Teilverhältnis ist in der projektiven Geometrie das Doppelverhältnis (Verhältnis zweier Teilverhältnisse).
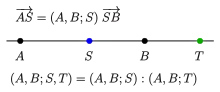
Im ist das Teilverhältnis , in dem ein Punkt eine Strecke teilt, die durch die Beziehung definierte Zahl .





- Beispiele
1) Ist , so ist der Mittelpunkt der Strecke .
2) Für teilt die Strecke im Verhältnis
3) Für liegt außerhalb und teilt die Strecke im Verhältnis .







Im ist das Doppelverhältnis , in dem ein Punktepaar eine Strecke teilt, die Zahl



(Verhältnis zweier Teilverhältnisse).
Das Doppelverhältnis, das hier zunächst nur für die affinen Punkte der reellen projektiven Ebene/Raum definiert wurde, lässt sich in homogenen Koordinaten mit Hilfe von Verhältnissen von Determinanten einheitlich ausdrücken (s. Doppelverhältnis).
Die große Bedeutung des Doppelverhältnisses beruht auf der Eigenschaft
- Das Doppelverhältnis ist bei Projektivitäten invariant.
Ist das Doppelverhältnis zweier Punktepaare , so spricht man von einer harmonischen Teilung. Liegen die Punkte harmonisch und ist der Fernpunkt der Gerade, so ist der Mittelpunkt der Strecke .



Affine Beschränkung (schlitzen)
Aus einem projektiven Raum lassen sich immer durch Herausnehmen von Hyperebenen (schlitzen) wieder affine Räume herstellen. Damit lassen sich die in einem projektiven Raum gewonnenen Resultate durch eine geeignete Wahl einer Ferngerade/-Hyperebene dann auch affin beschreiben. So sind z. B. einige Eigenschaften von Parabel und Hyperbel einfach die affinen Versionen von Ausartungen des Satzes von Pascal für einen projektiven Kegelschnitt.
Projektiver Kegelschnitt, Quadriken
Projektiver Kegelschnitt
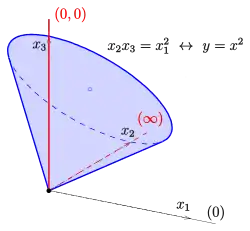
Stellt man die Parabel gemäß obiger Umrechnung () in homogenen Koordinaten dar, so erhält man die Gleichung . Diese Gleichung beschreibt im einen Kegel mit der Spitze im Ursprung. Er berührt die Ebene in der -Achse. Diese Gleichung ist also auch für den Fernpunkt (der y-Achse) erfüllt. Das Nullstellengebilde der homogenen Gleichung besteht aus den Parabelpunkten plus einem Fernpunkt.





- Man nennt die projektive Kurve mit der Gleichung und alle dazu projektiven Bilder einen nicht ausgearteten projektiven Kegelschnitt.
(Ein n.a. projektiver Kegelschnitt lässt sich auch über andere Eigenschaften definieren. Z. B.: Steiner-Erzeugung, v.Staudt-Kegelschnitt oder durch Symmetrien. Siehe hierzu die Artikel über projektive Kegelschnitte und über Ovale.)
Stellt man die Hyperbel in homogenen Koordinaten dar, so erhält man die Gleichung . Diese Gleichung ist auch für die beiden Fernpunkte (der x- bzw. y-Achse) erfüllt. Man erkennt, dass diese Gleichung durch den Koordinatenwechsel (lineare Abbildung) in die aus der Parabel entstandene Kurve übergeht. Sie ist damit auch ein projektiver Kegelschnitt.




Geht man vom Einheitskreis aus, erhält man zunächst und daraus . Auch diese Gleichung lässt sich durch eine lineare Abbildung in die erste Gleichung transformieren.



Ein Kegelschnitt besitzt besonders viele Automorphismen (Kollineationen, die den Kegelschnitt invariant lassen).
- Die Automorphismengruppe eines projektiven Kegelschnitts ist isomorph zur Gruppe . (Diese ist 3-fach-transitiv, d. h. zu je zwei Tripeln von Punkten gibt es eine Kollineation, die das eine Tripel auf das andere abbildet.)
Projektive Quadriken
Analog zu einem projektiven Kegelschnitt lassen sich projektive Quadriken in projektiven Räumen in homogenen Koordinaten als Nullstellengebilde von quadratischen Formen beschreiben.
Wie bei Kegelschnitten fallen im 3-dimensionalen projektiven Raum affin verschiedene Quadriken zusammen. Z. B.: Kegel und Zylinder oder Ellipsoid und elliptisches Paraboloid.
Plücker-Koordinaten und Klein-Quadrik
Im 3-dimensionalen reellen projektiven Raum lässt sich
ein Punkt (1-dim. Unterraum des ) in homogenen Koordinaten durch und
eine Ebene (3-dim. Unterraum) mit der Gleichung durch den (projektiven) Punkt beschreiben.





Für die bei vielen Untersuchungen wichtigen Geraden (Ursprungsebenen) gibt es keine so einfache homogene Beschreibung. Überlegungen von J. Plücker führten zur Einführung der nach ihm benannten Plücker-Koordinaten:[5]
Eine Gerade ist durch ein Paar von Punkten auf ihr eindeutig bestimmt. Plücker konnte zeigen, dass die sechs 2×2-Determinanten


bis auf ein gemeinsames Vielfaches die Gerade durch eindeutig bestimmen. Die Gerade lässt sich also durch den Punkt des 5-dimensionalen reellen projektiven Raums beschreiben.




Die durch die Geraden des bestimmten Punkte überdecken allerdings nicht den ganzen . Denn die Determinanten müssen noch die homogene quadratische Gleichung, die Plücker-Relation, erfüllen:
- .

Diese Gleichung beschreibt eine projektive Quadrik im 5-dimensionalen projektiven Raum, die als Klein-Quadrik bezeichnet wird. Jeder Punkt der Klein-Quadrik repräsentiert eine Gerade des .
Anwendungen der Plücker-Koordinaten findet man im englischen Artikel Plücker coordinates.
Das Konzept der Plücker-Koordinaten lässt sich auf jeden 3-dimensionalen pappusschen projektiven Raum (der Koordinatenbereich ist ein Körper) übertragen.
Homogene Darstellung rationaler Kurven
Eine Kurve mit einer rationalen Darstellung

wobei die Funktionen und Polynome sind, lässt sich in homogenen Koordinaten polynomial darstellen:



Eine ebene Kurve mit rationalen Koeffizientenfunktionen lässt sich also als Zentralprojektion einer polynomialen Kurve des auf die Einbettungsebene auffassen.
Auf diese Weise lässt sich z. B. eine rationale Bezierkurve mit Hilfe einer Projektion einer gewöhnlichen (polynomialen) Bezier-Kurve darstellen. Insbesondere Ellipsen- und Hyperbelbögen sind Projektionen von Bezierkurven vom Grad 2 (Parabeln).
Axiomatische projektive Geometrie
In der axiomatischen projektiven Geometrie geht man zunächst von sehr schwachen Axiomen, den Inzidenzaxiomen aus. Eine so definierte projektive Ebene besteht aus einer Menge von Punkten und einer Menge von Geraden mit den einfachen Inzidenzeigenschaften
- (1:) Je zwei Punkte haben genau eine Verbindungsgerade und
- (2:) Je zwei Geraden haben genau einen Schnittpunkt.
Solch eine projektive Ebene ist noch sehr weit von der reellen projektiven Ebene entfernt. Erst durch ein zusätzliches Axiom (Satz von Pappos) ist solch eine projektive Ebene überhaupt erst mit Hilfe eines Vektorraums über einem Körper beschreibbar und damit lineare Algebra einsetzbar. Um zu erreichen, dass dieser Körper sogar die reellen Zahlen sind, sind noch einige weitere Axiome nötig. (Siehe Hilberts Axiomensystem der euklidischen Geometrie)
Da in einem projektiven Raum sich Geraden nicht unbedingt schneiden müssen, aber andererseits jede ebene Punktmenge eine projektive Ebene sein soll, muss man im Raum Axiom (2) durch das Veblen-Young-Axiom ersetzen:
- (Axiom von Veblen-Young) Sind , , , vier Punkte, so dass und mit einem gemeinsamen Punkt inzidieren, so inzidieren auch und mit einem gemeinsamen Punkt.






In einem mindestens 3-dimensionalen projektiven Raum gilt, im Gegensatz zum ebenen Fall, immer der Satz von Desargues und der Raum ist dann über einem Schiefkörper (nicht notwendig kommutativer Körper) koordinatisierbar.
Im ebenen Fall gibt es zahlreiche sog. nicht desarguessche projektive Ebenen, die in der Regel durch einen Schließungssatz, z. B. den kleinen Satz von Desargues (Zentrum liegt auf der Achse), oder durch die Reichhaltigkeit der Automorphismengruppe (Gruppe der Kollineationen auf sich) charakterisiert werden. Eine Klasseneinteilung der nichtdesargueschen Ebenen liefert die Lenz-Barlotti-Klassifikation.
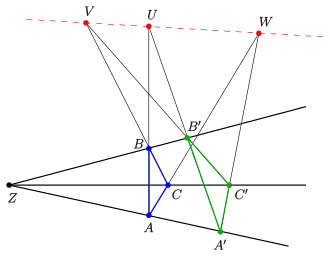
Die Sätze von Desargues und Pappus
- Satz von Desargues
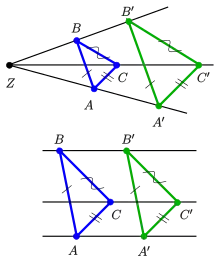
- Liegen zwei Dreiecke und perspektiv mit Zentrum , so sind die Schnittpunkte der Geraden durch sich entsprechende Seiten kollinear (s. oben, erstes Bild).



Die große Bedeutung dieses Satzes besteht in der Möglichkeit, eine projektive Ebene, in der für alle möglichen Konfigurationen der Satz gilt, einen Schiefkörper für eine inhomogene Koordinatisierung zu konstruieren. Dabei beschränkt man die projektive Ebene durch Herausnahme (Schlitzen) einer Gerade auf eine affine Ebene, in der dann die affine Formen des Satzes von Desargues gelten:
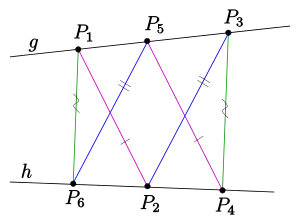
- (GD): (großer Desargues) Liegen zwei Dreiecke und perspektiv mit Zentrum , so folgt aus der Parallelität zweier Seitenpaare die Parallelität des dritten Seitenpaares (siehe Bild).
- (KD): (kleiner Desargues) Liegen zwei Dreiecke und auf drei parallelen Geraden, so folgt aus der Parallelität zweier Seitenpaare die Parallelität des dritten Seitenpaares (siehe Bild).
In der nun affinen Ebene wählt man zwei sich in einem Punkt schneidende Geraden . ( wird zum Ursprung des Koordinatensystems und werden zur x- und y-Achse.) Mit Hilfe des kleinen Satzes von Desargues definiert man zunächst Translationen und damit dann auf den Punkten der Gerade eine Addition. Mit Hilfe des großen Satzes konstruiert man Punktstreckungen und damit eine Multiplikation.[6] Schließlich lässt sich zeigen, dass Addition und Multiplikation aus der Punktmenge von einen Schiefkörper machen. Mit Hilfe einer Parallelprojektion (im Bild rot) lässt sich dieser Koordinatenschiefkörper auch auf die Gerade übertragen. Damit lässt sich dann jedem Punkt der affinen Ebene in gewohnter Weise ein Koordinatenpaar zuordnen. Eine Gerade wird (wie üblich) durch eine Gleichung oder beschrieben. Die so koordinatisierte affine Ebene lässt sich dann wieder durch Hinzunahme von Fernpunkten (s. o.) zu einer inhomogenen Beschreibung der projektiven Ebene erweitern. Auch die homogene Darstellung (s. o.) ist möglich. Da der Koordinatenschiefkörper allerdings nicht notwendig kommutativ ist, muss man auf die Reihenfolge bei der Multiplikation achten.







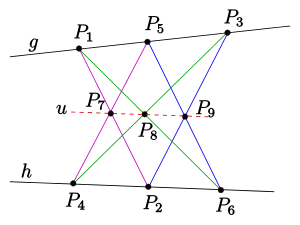
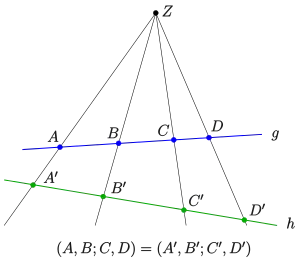
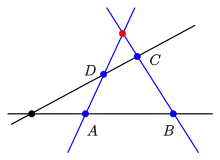
Liegen sechs Punkte einer projektiven Ebene abwechselnd auf zwei Geraden und , so sind die Punkte





kollinear, d. h., sie liegen auf einer Gerade (siehe Bild).

Ist die Gerade die Ferngerade, so erhält man die affine Form des Satzes.
Die Bedeutung dieses Satzes besteht darin, dass seine Gültigkeit in einer desarguesschen Ebene aus dem Koordinatenschiefkörper einen Körper (Multiplikation ist kommutativ) macht. Aber die Bedeutung des Satzes von Pappus ist noch viel größer, denn es gilt
- (Satz von Hessenberg) In einer projektiven Ebene, in der der Satz von Pappus gilt, gilt auch der Satz von Desargues.
Das heißt: Aus der alleinigen Gültigkeit des Satzes von Pappus lässt sich schon ein Körper konstruieren. Allerdings ist eine endliche desarguessche Ebene immer schon pappussch, da jeder endliche Schiefkörper kommutativ ist (Satz von Wedderburn).
Projektive Abbildungen von Punktreihen und Geradenbüschel
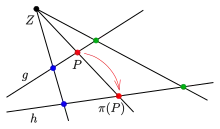
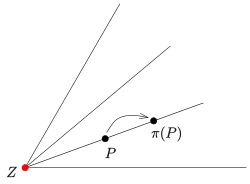
Sind zwei Geraden einer projektiven Ebene und ein Punkt, der nicht auf beiden Geraden liegt, so nennt man die Abbildung, die einen Punkt der Gerade auf den Schnittpunkt abbildet (projiziert) eine perspektive Abbildung (auch perspektive Zuordnung genannt) von auf mit Zentrum .


Eine Hintereinanderausführung mehrerer solcher Abbildungen nennt man eine projektive Abbildung. (Man beachte, dass hier nicht von einer Kollineation der projektiven Ebene die Rede ist. Es werden dabei lediglich die Punkte der Ausgangsgerade auf die Punkte der Zielgerade abgebildet.)
Ist die Zielgerade gleich der Ausgangsgerade (nur bei echt projektiven Abbildungen), so gilt für die Menge aller projektiven Abbildungen von auf sich

- (1) ist eine Gruppe,
- (2) operiert auf der Punktmenge von 3-fach-transitiv, d. h. zu je zwei Tripeln von Punkten gibt es eine projektive Abbildung, die das eine Tripel auf das andere abbildet.[7]
Die Bedeutung der projektiven Abbildungen zeigt der Satz
- (3) Eine projektive Ebene ist genau dann pappussch, wenn eine projektive Abbildung einer Geraden auf sich, die 3 Fixpunkte besitzt, nur die Identität sein kann.[8] Daraus folgt, dass sogar scharf transitiv ist.
Weiterhin gilt:
- (4) In einer pappusschen projektiven Ebene über einem Körper ist isomorph zu .[9]


Aufgrund des Dualitätsprinzips gibt es auch perspektive/projektive Abbildungen von einem Geradenbüschel auf ein anderes:
Sind zwei Punkte einer projektiven Ebene und eine Gerade, die nicht durch die beiden Punkte geht, so nennt man die Abbildung, die eine Gerade des Geradenbüschels in auf die Gerade abbildet (projiziert) eine perspektive Abbildung des Geradenbüschels in auf das Geradenbüschel in mit Achse . Eine Hintereinanderausführung mehrerer solcher Abbildungen nennt man eine projektive Abbildung des einen Büschels auf das andere.




Die Aussagen (1) – (4) gelten in analoger Weise auch für projektive Abbildungen von Geradenbüscheln.
Eine projektive Abbildung eines Geradenbüschels auf ein anderes spielt bei Steiners Definition eines projektiven Kegelschnitts (s. Satz von Steiner) eine wesentliche Rolle.
Endliche projektive Ebenen/Räume
Setzt man voraus, dass die Punktmenge (und damit auch die Geradenmenge) endlich ist, erhält man eine endliche projektive Ebene/Raum. Einfache Beispiele sind die projektiven Ebenen über endlichen Körpern. Da es keine echten endlichen Schiefkörper gibt (Satz von Wedderburn), ist jede endliche desarguessche Ebene bzw. Raum schon pappussch also über einem Körper koordinatisierbar.
Für eine endliche projektive Ebene gilt:
- Enthält eine Gerade Punkte, so enthalten alle Geraden Punkte, durch jeden Punkt gehen Geraden und insgesamt gibt es Geraden und Punkte.
- heißt in diesem Fall die Ordnung der endlichen Ebene.



Endliche projektive Ebenen spielen auch in der kombinatorischen Geometrie als Beispiele von Blockplänen eine Rolle.
Fano-Axiom
Es gibt (axiomatische) affine Ebenen, in denen sich die Diagonalen in einem Parallelogramm nicht schneiden, was unserer Erfahrung aus der reellen Ebene widerspricht. Um dies zu verhindern, schließt man solche Fälle mit dem affinen Fano-Axiom aus. Bei projektiven Ebenen leistet dies das projektive Fano-Axiom. Es lautet:
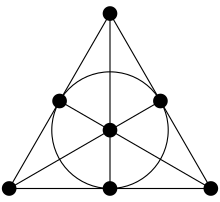
- (F): Die Schnittpunkte der Gegenseiten (Diagonalpunkte) in einem beliebigen vollständigen Viereck sind nicht kollinear.
Beschränkt man eine projektive Ebene, die dem Fano-Axiom genügt, so entsteht eine affine Ebene, in der die Diagonalen eines Parallelogramms nie parallel sind. Das Minimalmodell ist keine Fano-Ebene. Nimmt man aus dem Minimalmodell eine Gerade heraus, so entstehen Parallelogramme, deren Diagonalen parallel sind.
Pappussche Fano-Ebenen sind solche, die über einem Körper der Charakteristik , d. h. , beschrieben werden können.


Ovale, Ovoide, quadratische Mengen
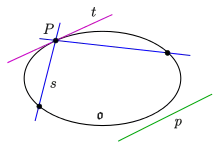
Neben Geraden und Ebenen spielen in projektiven Ebenen Ovale und in projektiven Räumen Ovoide als die nächst einfachen Kurven und Flächen eine Rolle.
- Ein Oval in einer projektiven Ebene ist eine Punktmenge, die von einer Gerade in höchstens zwei Punkten geschnitten wird und in jedem Punkt gibt es genau eine Tangente (Gerade mit einem Schnittpunkt).
Einfache Beispiele von Ovalen sind die n.a. projektiven Kegelschnitte. Während n.a. projektiven Kegelschnitte nur in pappusschen Ebenen existieren, gibt es Ovale fast in jeder projektiven Ebene. Die Kegelschnitte zeichnen sich durch Schließungssätze (Pascal, Brianchon) und durch besonders viele Symmetrien aus (s. o.).
In der reellen projektiven Ebene erhält man durch Zusammensetzen eines Halbkreises und einer geeigneten Halbellipse Ovale, die keine Kegelschnitte sind. Die Kurve mit der Gleichung ist auch ein Oval, das kein Kegelschnitt ist.

Für endliche projektive Ebenen (d. h. die Punktmenge und Geradenmenge sind endlich) gilt
- In einer projektiven Ebene der Ordnung (d. h. jede Gerade enthält Punkte) ist eine Menge genau dann ein Oval, wenn ist und keine drei Punkte von kollinear (auf einer Gerade) liegen.


Ist die Ebene pappussch und ungerader Ordnung gilt sogar:
- (Satz von Segre) In einer endlichen pappusschen Ebene ungerader Ordnung ist jedes Oval ein projektiver Kegelschnitt.
In einer pappusschen Ebene gerader Ordnung ist dieser Satz in seiner Allgemeinheit falsch. Es gibt Ovale, die keine Kegelschnitte sind.
Das räumliche Analogon zu einem Oval ist das Ovoid:
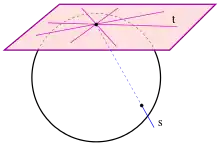
- Ein Ovoid in einem projektiven Raum ist eine Menge von Punkten, die von einer Gerade in höchstens zwei Punkten geschnitten wird und die Menge der Tangenten durch einen Punkt überdecken genau eine Hyperebene.
Einfache Beispiele von Ovoiden im reellen projektiven Raum sind Ellipsoide. Setzt man eine Halbkugel und ein Halbellipsoid passend zusammen erhält man ein Beispiel, das keine Quadrik ist.
Für endliche projektive Räume der Dimension ist der Raum über einem Körper koordinatisierbar[10] und es gilt:

- Ist ein Ovoid in einem endlichen projektiven Raum der Dimension , so ist


(Es gibt also im endlichen Fall nur im 3-dimensionalen Raum Ovoide!)[11]
- In einem projektiven Raum der Ordnung und Dimension ist eine Menge von Punkten genau dann ein Ovoid, wenn ist und keine drei Punkte von kollinear (auf einer Gerade) liegen.[11]



Eine Folge des Satzes von Segre ist:
- Im 3-dimensionalen Raum ungerader Ordnung ist jedes Ovoid schon eine Quadrik.
Wie im ebenen Fall ist dieser Satz für Räume gerader Ordnung falsch. Im geraden Fall gibt es Ovoide (Tits-Suzuki-Ovoide), die keine Quadriken sind.
Quadratische Mengen sind noch allgemeiner. Sie besitzen dasselbe Schnittverhalten mit Geraden wie Quadriken, müssen aber keine sein. Einfache Beispiele hierzu sind der Kegel und das einschalige Hyperboloid. Aber es gibt auch quadratische Mengen, die keine Quadriken sind.
Topologische projektive Ebenen
Eine topologische projektive Ebene ist eine projektive Ebene, auf deren Punkt- und Geradenmenge je eine Topologie so erklärt ist, dass die Bildung des Schnittpunktes von zwei Geraden und die Bildung der Verbindungsgeraden stetige Operationen sind.
Projektive algebraische Geometrie
Statt im affinen Raum zu arbeiten, geht man in der algebraischen Geometrie oft zum projektiven Raum über. Der Hauptvorteil besteht dabei darin, dass sich die Anzahl der Schnittpunkte zweier Varietäten dann leicht mit Hilfe des Satzes von Bézout bestimmen lässt.

Projektiver Raum als Verband
Ein projektiver Raum und seine Unterräume lässt sich auch als ein spezieller Verband auffassen:
- Der Verband der Unterräume eines endlich dimensionalen projektiven Raums ist äquivalent zu einem endlich dimensionalen komplementierten atomaren modularen Verband.[12]
Literatur
- E. Artin: Geometric Algebra, Interscience Publishers, 1957
- F. Bachmann: Aufbau der Geometrie aus dem Spiegelungsbegriff, 1959, (2. Auflage. Springer 1973)
- R. Baer: Linear Algebra and Projective Geometry, (Erstausgabe: 1952), Dover, 2005, ISBN 978-0-486-44565-6
- W. Blaschke: Projektive Geometrie, Springer-Verlag, 2013, ISBN 3-0348-6932-0
- Albrecht Beutelspacher: Einführung in die endliche Geometrie. I. Blockpläne. B.I. Wissenschaftsverlag, Mannheim/Wien/Zürich 1982, ISBN 3-411-01632-9.
- A. Beutelspacher, U. Rosenbaum: Projektive Geometrie Vieweg + Teubner, Braunschweig u. a. 1992, ISBN 3-528-07241-5
- H. Brauner: Geometrie projektiver Räume I,II. BI-Verlag, 1976
- Harold S. M. Coxeter: Projective Geometry, Springer 2003,
- P. Dembowski: Finite Geometries, Springer-Verlag, 1968, ISBN 978-3-642-62012-6
- Gerd Fischer: Analytische Geometrie. Vieweg 1978, S. 131–204
- R. Hartshorne: Foundations of Projective Geometry. W.A. Benjamin, New York 1967.
- David Hilbert: Grundlagen der Geometrie. 14. Auflage. Teubner, Stuttgart 1999, ISBN 3-519-00237-X (archive.org – Erstausgabe: 1899).
- J. W. P. Hirschfeld: Projective Geometries Over Finite Fields, Oxford University Press, 1979, ISBN 978-0-19-850295-1
- D.R. Hughes, F.C. Piper: Projective Planes, Springer-Verlag, 1973, ISBN 0-387-90043-8.
- L. Kadison, M.T. Kromann: Projective Geometry and modern Algebra, Birkhäuser-Verlag, 1996
- Gerhard Kowol: Projektive Geometrie und Cayley-Klein Geometrien der Ebene. Birkhäuser, Boston 2009
- Derrick Norman Lehmer: An Elementary Course in Synthetic Projective Geometry. Gutenberg eText
- H. Karzel, K. Sörensen, D. Windelberg Einführung in die Geometrie, Vandenhoeck und Ruprecht 1973
- H. Lenz: Vorlesungen über projektive Geometrie, Geest und Portig, Leipzig 1965.
- Rolf Lingenberg: Grundlagen der Geometrie, BI-Taschenbuch, 1969.
- Günter Pickert: Projektive Ebenen. 2. Auflage. Springer, Berlin / Heidelberg / New York 1975, ISBN 3-540-07280-2.
- Jürgen Richter-Gebert: Perspectives on Projective Geometry: A Guided Tour Through Real and Complex Geometry. Springer Science & Business Media, 2011, ISBN 978-3-642-17285-4.
- Pierre Samuel: Projective Geometry. Springer-Verlag, 1988, ISBN 978-0-387-96752-3
Weblinks
- Projective Geometry. (Memento vom 4. Mai 2005 im Internet Archive; PDF)
- Hanns-Jörg Stoß: Projektive Geometrie I.
- Projektive Geometrie, Kurzskript. (PDF; 183 kB) Uni Darmstadt
- Nigel Hitchin: Projective Geometry. (PDF)
Einzelnachweise
- Karl-Eugen Kurrer: The History of the Theory of Structures. Searching for Equilibrium. Ernst & Sohn, Berlin, ISBN 978-3-433-03229-9, S. 452.
- Felix Klein: Vorlesungen über nicht-euklidische Geometrie. 2. Teil. Verlag von Julius Springer, Berlin 1928 (online).
- R. Baer: Linear Algebra and Projective Geometry, Academic Press, 1952, ISBN 0-12-072250-X.
- C. Juel: Vorlesungen über projektive Geometrie. Springer-Verlag, Berlin, Heidelberg 1934, ISBN 978-3-662-01681-7, S. 8.
- Beutelspacher, Rosenbaum: S. 162
- R. Lingenberg: Grundlagen der Geometrie, S. 70
- H. Lenz: Vorlesungen über projektive Geometrie, Akad. Verl.-Gesellsch., 1965, S. 29
- H. Brauner: Geometrie projektiver Räume I. BI-Verlag, 1976, S. 42–47
- R. Lingenberg: Grundlagen der Geometrie. BI-Verlag, 1978, S. 113
- P. Dembowski: Finite Geometries. Springer-Verlag, 1968, ISBN 3-540-61786-8, S. 28
- P. Dembowski: Finite Geometries. Springer-Verlag, 1968, ISBN 3-540-61786-8, S. 48
- O. Tamaschke: Projektive Geometrie I. BI-Taschenbuch, 1969, S. 151