Zhurong (Rover)
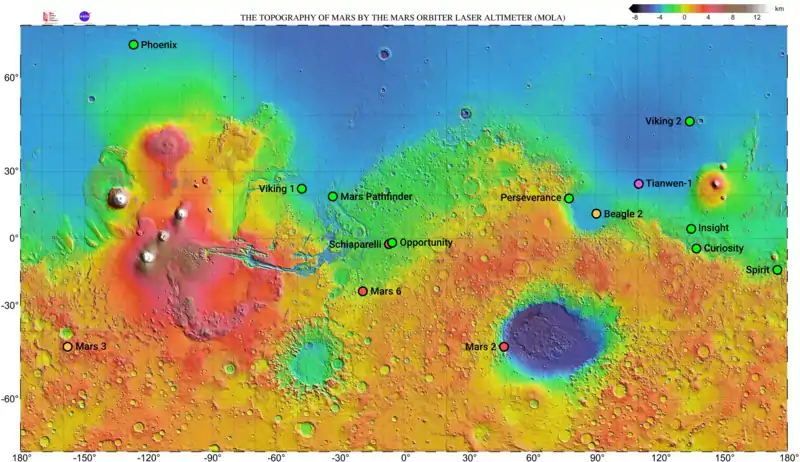
Zhurong (chinesisch 祝融號 / 祝融号, Pinyin Zhùróng hào, Zhuyin ㄓㄨˋㄖㄨㄥˊ ㄏㄠˋ) ist der Rover der am 23. Juli 2020 gestarteten chinesischen Marsmission Tianwen-1.[1] Er landete am 14. Mai 2021 um 23:18 Uhr UTC am südlichen Rand der Utopia Planitia bei 109,9° östlicher Länge und 25,1° nördlicher Breite,[2][3] wo er seit 280 Sol aktiv ist.
Aufbau
Energieversorgung
Die Maße des Rovers betragen ca. 2 × 1,65 × 0,8 Meter und das Gewicht 240 kg. Damit ist er fast doppelt so schwer wie die ersten chinesischen Mondrover. Während auf dem Mond nur 1/6 der irdischen Schwerkraft herrscht, liegt dieser Wert auf dem Mars bei etwa 1/3. Daher muss Zhurong robuster gebaut sein und benötigt stärkere Motoren. Einerseits haben diese Motoren eine höhere Leistungsaufnahme, andererseits ist die Solarkonstante, also die langjährig gemittelte Sonneneinstrahlung, auf dem Mars weniger als halb so groß wie in Erdnähe. Daher besitzt der Rover nicht nur zwei Solarmodule wie die Mondrover, sondern vier, von denen die beiden seitlichen Flügel zum Laden der Akkumulatoren nach der Sonne ausgerichtet werden,[4] während bei den Mondrovern nur eines der beiden Solarmodule beweglich ist.[5] Um Energie für die Heizung zu sparen, arbeitet der Rover erst ab Mittag, wenn die Temperatur auf der Marsoberfläche am höchsten und für die Messinstrumente am günstigsten ist. Ein Teil der über die Solarmodule gewonnenen Energie wird für den Betrieb des Rovers verwendet, mit dem Rest werden die Akkumulatoren geladen, die es dem Rover erlauben, die meteorologischen und Magnetfeld-Messungen auch nach Sonnenuntergang noch weiterzuführen.[6]
Anders als die Mondsonde Chang’e 3 besitzt Zhurong keine Radionuklidbatterie, und auch keine Radionuklid-Heizelemente wie die von derselben Entwicklergruppe um Sun Zezhou gebauten Mondrover Jadehase und Jadehase 2. Stattdessen hat Zhurong auf der Oberseite zwei runde „Hitzesammelfenster“aus Polyimid, das eine hohe Transparenz für Sonnenlicht, aber eine geringe Transparenz für fernes Infrarot besitzt, also wie ein Treibhausfenster wirkt.[7] Darunter befindet sich n-Undekan, das während des Marstags schmilzt und am Abend, wenn es bei sinkender Umgebungstemperatur wieder fest wird – der Stoff hat einen Schmelzpunkt von −26 °C –, rund 80 % der eingetragenen Sonnenenergie als Wärme wieder an den Rover abgibt und diesen so nach dem Prinzip des Latentwärmespeichers vor der nächtlichen Kälte schützt. Zum Vergleich: Die Galliumarsenid-Solarmodule des Rovers haben nur einen Wirkungsgrad von 30 %.[8][9] Die empfindlichen Systeme im Inneren des Rovergehäuses sind zusätzlich mit einer Isolation aus Aerogel versehen.[7]
Das Wetter auf dem Mars kann sich rasch ändern, mit Staubstürmen, die die Sonneneinstrahlung stark reduzieren. Daher besitzt der Rover ein autonomes Selbstüberwachungssystem. Wenn er bemerkt, dass seine Energiereserven – sowohl was Strom als auch Wärme betrifft – nur noch für einen begrenzten Zeitraum reichen, schaltet er sich selbsttätig ab, geht in einen Schlafmodus über und nimmt erst dann die Arbeit wieder auf, wenn das Wetter wieder besser ist.[10] Prinzipiell kann der Rover bis zu einer optischen Dicke der Atmosphäre von 0,5, also bei klarem Himmel, regulär arbeiten, seine Position wechseln, Messungen durchführen und Nutzlastdaten an den Orbiter funken. Bei einer optischen Dicke von 0,5–0,8, also wenn sich Staub in der Atmosphäre befindet, schränkt Zhurong seine Aktivitäten nach Möglichkeit ein. Bei einer optischen Dicke von mehr als 0,8, also bei schweren Staubstürmen, geht er in den Schlafmodus über.[4] Die Oberfläche der Solarmodule ist mit einer nach einem ähnlichen Prinzip wie die Superhydrophobie arbeitenden Antihaftbeschichtung versehen. Dadurch setzt sich von vornherein wenig Staub auf ihnen ab, der ihre Effizienz reduziert. Außerdem werden die Solarmodule während der Nacht aus Kälteschutzgründen über dem Rover zusammengeklappt. Wenn sie dabei kurzzeitig eine senkrechte Stellung einnehmen, rollen Sand- und Staubkörner nach unten weg.[11]
Antriebssystem
Zhurong besitzt sechs einzeln angetriebene Räder von 30 cm Durchmesser und 20 cm Breite, auf deren Außenseite zur Verbesserung der Traktion jeweils 20 über die gesamte Breite verlaufende, 5 mm hohe Grate angebracht sind. Zur Vibrations- und Stoßdämpfung sind die widerstandsfähigen, abriebfeste Laufflächen über elastische Speichen mit den Radnaben verbunden. Alle sechs Räder können um 90° gedreht werden, wodurch der Rover nicht nur Kurven fahren und sich um sich selbst drehen, sondern sich vor größeren Hindernissen auch wie eine Krabbe in seitlicher Richtung bewegen kann.[12] Außerdem kann der Rover rückwärts fahren.[13] Im Regelbetrieb liegt die Unterseite des Rovergehäuses etwa 30 cm über dem Marsboden. Das Gehäuse ist in Fahrtrichtung um etwa 1° bis 2° nach unten geneigt, wodurch der Rover hinten etwas mehr Bodenfreiheit hat als vorne.
Wie bei den Mondrovern arbeitet das Antriebssystem von Zhurong nach dem Prinzip des Doppelachsaggregats mit einem Haupt- und einem Sekundärwaagebalken auf jeder Seite, wobei hier der Sekundärwaagebalken vorne angeordnet ist.[14] Anders als die Vorgängermodelle besitzt der Marsrover eine aktive Radaufhängung, die es ihm ermöglicht, zum Beispiel ein defektes Vorderrad hochzuheben und auf fünf Rädern weiterzufahren. Die Antennen des Bodenradars sind – im Gegensatz zu den Mondrovern – nicht auf der Unterseite des Gehäuses angebracht, sondern an der Stirnseite. Dadurch kann sich der Rover, falls sich eines oder mehrere Räder festgefahren haben, mit dem flachen Bauch, der durch die große Fläche weniger einsinkt, gegen den Boden stemmen und versuchen, die Räder nach oben aus dem Sand zu ziehen. Auch während des Flugs zum Mars ruhte der Rover mit dem Bauch auf der Ladefläche des Landers. Dadurch konnte man auf eine Stützkonstruktion verzichten, die die Radaufhängung vor der starken Beschleunigung beim Start der Trägerrakete bzw. Verzögerung beim Eintritt in die Marsatmosphäre hätte schützen müssen.
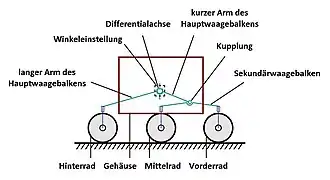
Im Einzelnen besteht das Antriebssystem aus folgenden Komponenten. Die Längenangaben der Arme bezeichnen den Abstand von Gelenkmitte zu Gelenkmitte:
- 6 einzeln angetriebene Räder
- 6 Lenkarme, für jedes Rad einer
- 6 individuell steuerbare Lenkmotoren, für jeden Lenkarm einer
- 2 Hauptwaagebalken, auf jeder Seite einer, mit jeweils einem langen (81 cm) und einem kurzen (39 cm) Arm
- 2 Sekundärwaagebalken, 107,5 cm lang, auf jeder Seite einer
- 2 Motoren, auf jeder Seite einer, mit denen der Winkel zwischen langem und kurzem Arm der Hauptwaagebalken individuell eingestellt werden kann
- 2 Kupplungen, auf jeder Seite eine, mit denen das Gelenk zwischen dem kurzen Arm des Hauptwaagebalkens und dem Sekundärwaagebalken individuell verriegelt oder gelöst werden kann
- 1 quer durch das Gehäuse gehende Differentialachse, über die die beiden Hauptarme am Gelenk zwischen langem und kurzem Arm miteinander verbunden sind
Die Differentialachse erfüllt keine Antriebsfunktion, sondern dient nur dazu, das Fahrgestell mit dem Gehäuse zu verbinden, wie die Achse eines Pferdekarrens. Räder, Radlenkung, Winkeleinstellung der Arme und Kupplung der Arme werden jeweils von einem bürstenlosen Gleichstrommotor, also insgesamt 16 einzeln regelbaren Motoren angetrieben. Die Kupplung zwischen dem kurzen Arm des Hauptwaagebalkens und dem Sekundärwaagebalken ist im Regelfall gelöst. Haupt- und Sekundärwaagebalken können sich frei gegeneinander bewegen, wodurch sichergestellt ist, dass alle sechs Räder ständig Bodenkontakt haben.
Wenn ein Rad beschädigt ist, wird zunächst mit den Motoren am Mittelgelenk des Hauptwaagebalkens – um eine seitliche Schräglage zu vermeiden, auf beiden Seiten des Gehäuses – der Winkel zwischen dessen beiden Armen so eingestellt, dass sich der Schwerpunkt des Rovers zwischen die beiden noch funktionierenden Räder verlagert, also bei einem beschädigten Vorderrad nach hinten. Dann verriegelt die Kupplung auf der Seite des beschädigten Rads das Gelenk zwischen dem kurzen Arm des Hauptwaagebalkens und dem Sekundärwaagebalken. Nun wird mit dem zuständigen Arm des Hauptwaagebalkens das beschädigte Rad vom Boden hochgehoben, bis sich seine Unterkante etwa auf Unterkante des Gehäuses befindet – die Position, die die Räder während des Fluges hatten. Wenn auf der gegenüberliegenden Seite des Gehäuses ein weiteres Rad beschädigt wird, kann der Rover auch dieses vom Boden abheben und auf vier Rädern weiterfahren. Seine Fähigkeit, in unebenem Gelände die Höhe des Gehäuses über dem Boden anzupassen, ist dann jedoch stark eingeschränkt.
Normalerweise befindet sich die Unterseite des Gehäuses etwa 30 cm über dem Boden. Bei kleineren Felsen auf dem Weg kann die Bodenfreiheit durch Verkleinern des Winkels zwischen den beiden Armen des Hauptwaagebalkens auf 50 cm angehoben werden. Im regulären Fahrmodus kann der Rover Steigungen von bis zu 20° bewältigen, bergauf und bergab. In diesem Fall ist aber die Belastung der Räder unterschiedlich verteilt. Bei einer Simulation mit einer idealen, hindernisfreien Oberfläche lag bei horizontaler Fahrt die Normalkraft auf allen Rädern bei etwa 150 N. Bei einer um 20° geneigten Fläche waren bei Bergauffahrt die Hinterräder mit 250 N belastet, die Vorderräder mit 60 N. Um dies etwas auszugleichen, wird bei Hangfahrten das Gehäuse möglichst nah an den Boden gesenkt, um den Schwerpunkt des Rovers tiefer zu legen.
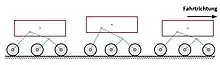
Bei steileren Berghängen von bis zu 30° wechselt der Rover in den Klettermodus. Hierzu werden zunächst die vier vorderen Räder festgestellt, in anspruchsvollerem Gelände noch zusätzlich verdreht, um sie zu verankern. Dann nähern sich die Hinterräder mit Unterstützung der Motoren am Gelenk des Hauptwaagebalkens, die den Winkel zwischen beiden Armen verkleinern, dem vorderen Fahrgestell (das Gehäuse hebt sich). Nun werden die Hinterräder verdreht, um sie am Boden zu fixieren. Die vorderen vier Räder werden parallel gestellt und ziehen, nun unterstützt durch Winkelvergößerung zwischen den Armen des Hauptwaagebalkens, den Rover den Hang hinauf (das Gehäuse senkt sich). Dann werden wieder die Vorderräder verdreht, die Hinterräder parallel gestellt und der Vorgang wiederholt, wie bei einer Spannerraupe.[15]
Nutzlasten

- Topografische Kamera (NaTeCam) oben auf dem Mast an der Vorderseite: 2048 × 2048 Pixel, Farbaufnahmen im Bereich 0,5 m – ∞.[16] Diese Stereokamera mit zwei Objektiven ist oben auf dem Mast montiert. Sie soll mit ihren dreidimensionalen Aufnahmen bei der Navigation helfen und die geologischen Studien unterstützen. Auf der „Stirn“ zwischen den beiden Objektiven trägt der Rover das Schriftzeichen 火 („Feuer“) in Siegelschrift. Seit dem 1. Jahrhundert n. Chr. heißt der Mars in China 火星, also „Feuerstern“.[17]
- Multispektralkamera (MSCam): 480 nm, 525 nm, 650 nm, 700 nm, 800 nm, 900 nm, 950 nm, 1000 nm, also blau bis infrarot. Diese Kamera ist zwischen den beiden „Augen“ der topografischen Kamera angeordnet. Mit ihr sollen Informationen über die Zusammensetzung des Oberflächenmaterials gesammelt werden.[18]
- Bodenradar mit zwei Kanälen (RoPeR): Niederfrequenzkanal (CH1) mit zwei 1,35 m langen Stabantennen an der Stirnseite des Gehäuses für eine Tiefe von 10–100 m mit einer Auflösung von einigen Metern sowie Hochfrequenzkanal (CH2) mit zwei Antennen unten an der Vorderseite des Gehäuses für eine Tiefe von 3–10 m mit einer Auflösung von einigen Zentimetern.[19]
- Gerät für die Messung der Zusammensetzung des Marsoberflächenmaterials (Si, Al, Fe, Mg, Ca, Na, O, C, H, Mn, Ti, S etc.) mittels laserinduzierter Plasmaspektroskopie und Infrarotspektrometer (850–2400 nm mit einer Auflösung von 12 nm). Dieses Gerät (MarSCoDe) wurde vom Shanghaier Institut für technische Physik der Chinesischen Akademie der Wissenschaften (中国科学院上海技术物理研究所) entwickelt,[20] die dabei vom Institut de recherche en astrophysique et planétologie in Toulouse unterstützt wurden.[21]
- Fluxgate-Magnetometer (RoMAG) für die Messung des Magnetfelds nahe der Marsoberfläche (Messbereich: ±2000 nT, Auflösung: 0,01 nT, temperaturstabil 0,01 nT/°C). Das nach dem Prinzip der Magson Fluxgate-Magnetometer aus Berlin arbeitende Gerät[22] mit zwei Meßköpfen im Abstand von 67,5 cm an der Basis und am oberen Ende des Masts wirkt mit dem Magnetometer auf Orbiter zusammen.[23][24]
- Wetterstation (MCS): Temperatur: −120 °C bis +50 °C bei einer Auflösung von 0,1 °C, Luftdruck: 1–1500 Pa bei einer Auflösung von 0,1 Pa,[25] Windgeschwindigkeit: 0–70 m/s bei einer Auflösung von 0,1 m/s, Windrichtung: 0°–360° bei einer Auflösung von 5°, Mikrofon: 20 Hz–20 kHz mit einer Empfindlichkeit von 50 mV/Pa.[26] Die Temperatur- und Luftdruck-Sensoren befinden sich rechts vorne an der Oberseite des Gehäuses, am unteren Ende der UHF-Rundstrahlantenne, der Windmesser und das Mikrofon unter dem linken Objektiv der topografischen Kamera auf dem Mast.[27][6]
Landephase
Die Sonde bremste nach dem Eintritt in die Marsatmosphäre zunächst für 5 Minuten nur mit ihrem Strömungswiderstand und dynamischem Auftrieb von 4,8 km/s (also 17.280 km/h) auf 460 m/s ab, dann 90 Sekunden lang mit einem Fallschirm auf 95 m/s, bevor das Triebwerk des Landemodul zündete. Anders ausgedrückt, 98 % der Geschwindigkeit wurden über die Atmosphäre abgebremst. Da die Marsatmosphäre erstens dünner ist als die Erdatmosphäre, zweitens eine andere chemische Zusammensetzung besitzt und sich außerdem auf dem Mars immer mit böigen Winden zu rechnen ist, war dies der schwierigste Teil der Mission. Es gab nur einen Versuch, und die Entwickler verwendeten sehr viel Zeit und Sorgfalt auf die Konstruktion der Hitzeschutzhaube und des Fallschirm-Mechanismus.[28] Zur Einordnung: von den 42 Mars-Missionen, die diverse Staaten seit den 1960er Jahren durchführten, waren nur 52 % erfolgreich.[29]
Es wurden zunächst Windkanäle umgebaut, um den Einfluss des CO2-Gehalts der Luft auf Aerodynamik und Materialerhitzung zu testen. Die auf diese Art ermittelten Daten bildeten die Grundlage, um eine im Vergleich zu den für Landungen auf der Erde optimierten Raumflugkörpern der Akademie für Weltraumtechnologie völlig neue Form der Hitzeschutzhaube zu konstruieren, die unter strömungsmechanischen Aspekten mehr einem Nurflügelflugzeug als einer Landekapsel ähnelte. Um den Einfluss von Unwägbarkeiten in der Marsatmosphäre zu reduzieren, entschied man sich dafür, zunächst auf einer ballistischen Flugbahn in die Atmosphäre einzudringen, bei der die Bremsung nur durch den Strömungswiderstand stattfindet. Bei Mach 3 wurde dann jedoch ein Trimmflügel ausgefahren, der die Eintrittskapsel in einem bestimmten Winkel ausrichtete, sodass auf sie nicht nur Strömungswiderstand, sondern auch dynamischer Auftrieb einwirkte, wie bei einem Raumgleiter. Vor dem Auslösen des Fallschirms musste die Kapsel dann erneut gekippt werden, damit der Luftstrom am Heck den Fallschirm optimal entfaltete.[28]
Der 200 m² große, 34 m lange Überschallfallschirm wurde 2018 auf dem Abfangraketen-Testgelände Korla mit Höhenforschungsraketen vom Typ Tianying 6 immer wieder in Höhen von 30–54 km geschossen, wo die irdische Atmosphäre so dünn ist wie auf dem Mars in 4 km Höhe.[30][31] Es musste unbedingt sichergestellt werden, dass sich der Fallschirm bei trotz hoher Geschwindigkeit (460 m/s) niedrigem Staudruck korrekt entfaltete. Um dies zu kontrollieren, sowohl während der Tests als auch später beim realen Einsatz der Sonde, versahen die Entwickler den Fallschirm mit roten Streifen. Zwei senkrecht nach oben gerichtete Kameras filmten das Entfalten und die Unterseite des Fallschirms während des Landevorgangs, und anhand der korrekten Lage der Streifen konnte später bestätigt werden, dass der Fallschirm die beabsichtigte Form eingenommen hatte. Wenn sich der Fallschirm bei 460 m/s plötzlich öffnet, wird von der trägen Masse der etwa 1,8 t schweren Landekapsel ein starker Zug ausgeübt. Daher wurde der Fallschirm mit Verstärkungsstreifen aus besonders widerstandsfähigem Aramidgewebe versehen.[32]
Mission
Erste Woche
Nach der Landung am 14. Mai 2021 klappte der Rover zunächst den Kameramast an seiner Vorderseite und den Mast mit der kleinen X-Band-Parabolantenne an seinem Heck hoch, danach entfaltete er die Solarzellenmodule.[33] Sobald die Stromversorgung gesichert war, richtete er die Antenne auf die Erde aus und sendete zunächst für 30 Minuten pro Tag mit der sehr niedrigen Datenübertragungsrate von 16 bit/s erste Telemetriedaten – danach hatte sich der Mars von der Erde weggedreht.[34] Am 17. Mai 2021 erreichte der Orbiter einen Relais-Orbit mit einer Umlaufzeit von 1/3 Marstag. Nun konnte der Rover mit seinem relativ stromsparenden Dezimeterwellen-Sender die Telemetriedaten über die Rundstrahlantenne (in Fahrtrichtung rechts vorne auf dem Gehäuse) über das Proximity-1-Protokoll des Consultative Committee for Space Data Systems mit einer Übertragungsrate von 38 kbit/s an den Orbiter senden,[34] der sie dann an die Erde weitervermittelte.[4] Da sich der Orbiter nur einmal pro Tag für acht bis neun Minuten in UHF-Reichweite des Rovers befindet, können über diesen Kanal de facto nur 20 MB pro Tag übertragen werden. Zhurong machte von der Landeplattform aus sowohl mit der topografischen Kamera auf dem Mast als auch mit den Hindernisvermeidungskameras an der Vorderseite des Gehäuses Bilder von der Umgebung, es dauerte jedoch bis zum 18. Mai 2021, bis das erste Bild auf der Erde ankam.[35] Dann konnte auch verifiziert werden, dass die Rampe, über die er auf die Marsoberfläche gelangen soll, korrekt ausgefahren war.[36]
Als alternativer Kommunikationskanal steht noch das X-Band zur Verfügung. Dieses wird jedoch wegen des hohen Energieverbrauchs nur alle drei Marstage genutzt. Dann befindet sich der Rover unter dem marsfernsten Punkt der Umlaufbahn des Orbiters, es ist über einen Zeitraum von 25 Minuten eine Übertragungsrate von 32 kbit/s möglich. Damit können jedes Mal, also jeden dritten Tag, 50 MB an Daten übertragen werden.[35][37] Dementsprechend arbeitete der Rover zunächst in einem dreitägigen Zyklus:
- Am ersten Marstag fotografierte der Rover die Umgebung an der Stelle, wo er sich gerade befand und sendete die entsprechenden Bilddateien. Die Wissenschaftler der Nationalen Astronomischen Observatorien entschieden anhand der bis zu diesem Zeitpunkt erlangten Erkenntnisse, welche Stelle der Rover als nächstes anfahren sollte. Die Techniker im Raumfahrtkontrollzentrum Peking entschieden anhand der Bilder und der während des Parkorbits erstellten Landkarten, ob dies möglich war. Da die Einstellung der Bodenfreiheit des Rovers über die aktive Radaufhängung möglichst auf ebenem Boden erfolgen muss, ist eine vorausschauende Routenplanung nötig.[15] Außerdem wurde bestimmt, welche Messungen die Instrumente am folgenden Tag durchführen sollten.
- Am zweiten Marstag führte der Rover entsprechend dem am Vortag erstellten Arbeitsplan Messungen an der Stelle aus, wo er sich gerade befand und funkte diese Daten zum Orbiter.
- Am dritten Marstag begab sich der Rover zum nächsten Ziel. Während der Fahrt arbeiten von den Instrumenten nur das Bodenradar, das Magnetometer und die Wetterstation. Das Bodenradar schaltet sich ab, wenn der Rover stehen bleibt.[6]
Neben der unmittelbaren Navigation vor Ort über die Stereokameras und das Hindernisvermeidungssystem des Rovers findet auch eine Positionsbestimmung von der Erde aus statt. Hierzu muss man warten, bis für den Rover auf dem Mars die Sonne aufgeht. Denn nur dann ist der Rover auch der Erde zugewandt, weil die Erde eine nähere Umlaufbahn um die Sonne hat als der Mars. Dann wird seine Position vom Chinesischen Tiefraumnetzwerk mittels Langbasisinterferometrie unter Einbeziehung der über die Bahndaten bekannten Position des Orbiters bestimmt. Da sich der Mars auf seiner Umlaufbahn um die Sonne im Jahr 2021 relativ nah an der Erde befindet, sind hierfür alle Stationen des Chinesischen VLBI-Netzwerks geeignet, selbst die kleine 25-m-Antenne des Astronomischen Observatoriums Shanghai in Sheshan.[38]
Von der Landestelle zur Haube der Eintrittskapsel
.jpg.webp)
Am 22. Mai 2021 um 02:40 Uhr UTC rollte der Rover in Richtung Osten von der Ladefläche[39] und fotografierte den Lander von der Marsoberfläche aus mit seinen hinteren Hindernisvermeidungskameras.[40][41] Im Laufe der folgenden Tage dokumentierte Zhurong zunächst mit seiner topografischen Kamera aus einer Entfernung von 6 m von Südosten aus den Zustand des Landers. Am 1. Juni 2021 begab er sich zu einer von den Technikern im Raumfahrtkontrollzentrum Peking ausgewählten, von Felsbrocken halbwegs freien Stelle 10 m südlich des Landers und setzte eine kleine WLAN-Kamera so auf dem Boden ab, dass das Objektiv auf einen Punkt etwas seitlich vom Lander gerichtet war. Der Rover fuhr im Rückwärtsgang wieder auf den Lander zu und positionierte sich genau im Brennpunkt des Kameraobjektivs, während der Lander leicht unscharf als Hintergrund für das Erinnerungsfoto diente.[42] Die Kamera filmte den Vorgang und funkte die Bild- und Videodateien an den Rover, der sie über den Orbiter zur Erde schickte.[43][44][45]
Anschließend begann der Rover mit der Erkundung.[27][46] Die nominelle Höchstgeschwindigkeit des Rovers beträgt 200 Meter pro Stunde, im Durchschnitt bewegt er sich jedoch wesentlich langsamer. Zhurong besitzt auf der Vorder- und auf der Rückseite des Gehäuses jeweils zwei Hindernisvermeidungskameras mit Fischaugenobjektiven, die nicht nur einen sehr großen Bildwinkel, sondern auch eine beträchtliche Schärfentiefe besitzen und Stereobilder über einen großen Bereich liefern, welche vom Bordrechner in 3-dimensionale Geländedaten verarbeitet werden, aufgrund derer er Entscheidungen über den einzuschlagenden Kurs treffen kann.[47]
Um zunächst noch Erfahrung mit dem Fahrverhalten des Rovers zu sammeln, gingen die Techniker in Peking am Anfang sehr vorsichtig vor. Am ersten Tag fuhr Zhurong insgesamt nur 10 m.[48][49] Am 11. Juli 2021, dem 56. Marstag, hatte der Rover 410 m zurückgelegt, er bewegte sich in südlicher Richtung auf die vor der Landung abgeworfene Haube der Eintrittskapsel mit dem Fallschirm zu. Zwischen Landestelle und Hitzeschutzhaube befand sich eine in Ost-West-Richtung verlaufende, etwa 40 m lange, 8 m breite und 60 cm hohe Sanddüne, die Zhurong aus Sicherheitsgründen an der Ostseite umfuhr.[50] Am folgenden Tag erreichte der Rover die Hitzeschutzhaube, die außen zwar angesengt, ansonsten aber augenscheinlich unbeschädigt war. Aus 30 m Abstand, in sicherer Entfernung vom Fallschirm, fotografierte er die Haube mit seiner topografischen Kamera. Zu diesem Zeitpunkt befand er sich 350 m Luftlinie von der Landestelle entfernt.[51][52]
Laut seinem „Kilometerzähler“ hatte Zhurong am 15. Juli 2021, dem 60. Marstag, 450 m zurückgelegt, was etwa 7,5 m pro Tag entspricht. Damit war er deutlich schneller als der Mondrover Jadehase 2, der für eine ähnliche Strecke – 404 m – 400 Tage benötigte, also auf die gesamte Zeit gerechnet nur rund 1 m pro Tag zurücklegte. Das hängt nur zum Teil mit den schwierigen Temperaturverhältnissen auf dem Mond zusammen, die Yutu 2 dazu zwingen, während der 14-tägigen Mondnacht in einen Schlafmodus zu wechseln und auch während der größten Mittagshitze eine Pause einzulegen. Auch Zhurong fährt nur jeden dritten Tag. Der wesentliche Unterschied liegt im Fahrstil. Während der Mondrover Hindernisse mit komplizierten Rangiermanövern möglichst eng umfährt,[53] oft erst nach Rücksprache mit dem Raumfahrtkontrollzentrum Peking, ist Zhurong dank seines robusteren und anpassungsfähigeren Fahrwerks dazu in der Lage, kleinere Hindernisse in Eigenverantwortung einfach zu überrollen.[54]
Fahrt nach Süden
Am 6. August 2021 hatte der Rover 808 m zurückgelegt und damit in 80 Tagen den chinesischen Streckenrekord des Mondrovers Jadehase 2 eingestellt, der beim lunaren Sonnenuntergang am 16. Juli für 738 m zweieinhalb Jahre gebraucht hatte.[52] Während Zhurong sich ab dem 30. Juli durch immer schwieriger werdendes Gelände in Richtung Süden bewegte,[55][56] vermied er es, durch Dünen oder Krater zu fahren und bewegte sich stattdessen am Fuß der Dünen und am Rande der Krater entlang.[57] Wie auch ein Foto der hinteren Hindernisvermeidungskamera belegt, fuhr er an diesem Tag in dem steinübersäten Gelände über einen Felsbrocken erfolgreich hinweg, der zwischen seinen linken und rechten Rädern lag.[58] Mittlerweile hatte man den Arbeitsrhythmus des Rovers so modifiziert, dass von den Wissenschaftlern jeden Tag ein neuer Arbeitsplan erstellt wird und der Rover jeden Tag Messungen durchführt. Der Stillstand zur Orientierung an jedem dritten Tag entfällt somit und es können mehr Daten ermittelt werden.[59]
An sich hätte Zhurong am 15. August 2021, nach 90 Marstagen, seine Primärmission erfüllt. Da der Rover jedoch noch einwandfrei funktionierte – er hatte bis zu jenem Tag 889 m zurückgelegt – beschloss man, diesen Arbeitsmodus noch einen Monat beizubehalten. Am 8. Oktober 2021 fand eine Konjunktion von Erde, Sonne und Mars statt, die beiden Planeten befanden sich fast auf einer Linie, mit der Sonne in der Mitte. Die elektromagnetische Strahlung der Sonne stört um diese Zeit, für etwa 40 Tage von Mitte September bis Mitte Oktober 2021, die Funkverbindung zwischen dem Orbiter und den Bodenstationen auf der Erde. Daher stellten Orbiter und Rover während dieser Zeit ihre Erkundungsaktivitäten ein und gingen in einen Sicherheitsmodus über.[60] Nach dem Ende der Funkstörung setzte der Rover am 20. Oktober 2021 seinen Weg nach Süden fort. Er versucht nun die Küste des Meeres zu erreichen, das die Utopia Planitia in der späten Hesperianischen Periode vor etwa 1,8 Milliarden Jahren möglicherweise war.[57][61][62] Der Orbiter wurde am 8. November 2021 mit einem Bahnkorrekturmanöver in seinen eigentlichen Missionsorbit von 265 × 10.700 km mit einer Umlaufzeit von 7,08 Stunden gebracht und fungiert von dort aus weiterhin als Relaissatellit für Zhurong.[63]
Bis zum 31. Januar 2022 hatte der Rover 1,5 km zurückgelegt.[64]
Relais-Experimente mit Mars Express
Parallel dazu wurden zwischen dem 7. und dem 22. November 2021 fünf Tests mit der europäischen Sonde Mars Express durchgeführt, die bereits an der Sonnenbeobachtung während der Konjunktion mitwirkte. In China ist nur die Volksbefreiungsarmee berechtigt, Raumflugkörper zu steuern. Das TT&C-System ist so angelegt, dass Mars-Express keine Steuersignale an den Rover übertragen kann.[65] Daher funkten zu den vorher vereinbarten Terminen die Europäische Weltraumorganisation und die Nationale Raumfahrtbehörde Chinas über ihre jeweiligen Tiefraumnetzwerke getrennt Steuerbefehle an Mars Express und – über den Tianwen-1-Orbiter – an Zhurong, damit diese die notwendigen Vorbereitungen für die Datenübertragung trafen. Wenn Mars Express dem Rover auf 4000 km nahegekommen war, funkte Zhurong für jeweils 10 Minuten Nutzlastdaten an die europäische Sonde. Mars Express speicherte die Daten bei sich an Bord und funkte sie nach dem Ende der Übertragung an die europäischen ESTRACK-Stationen. Von dort wurden sie an das Europäische Raumflugkontrollzentrum in Darmstadt weitergeleitet, das sie wiederum an das Raumfahrtkontrollzentrum Peking weiterleitete.[66]
Die ersten drei Tests am 7., 16. und 18. November waren noch nicht erfolgreich, aber beim vierten Versuch am 20. November 2021 gelang das Experiment. Nach Dekodierung der Signale (233 KB) konnten die Experten in Peking feststellen, dass die von Zhurong ermittelten Daten vollständig und einwandfrei übertragen worden waren. Der fünfte Versuch am 22. November 2021 war jedoch erneut ein Fehlschlag. Eine Untersuchung ergab, dass bei den fehlgeschlagenen Versuchen ein anderes Gerät an Bord von Mars Express die Funkübertragung gestört hatte.[67] Es ist geplant, weitere derartige Tests durchzuführen, um diese Art der Kommunikation zwischen Sonden der beiden Raumfahrtbehörden zu optimieren.[68][69]
Wissenschaftliche Ziele
Neben der Untersuchung von Strukturen, inklusive möglicher Wassereis-Schichten, unterhalb der Marsoberfläche mithilfe der Bodenradar-Geräte auf Rover und Orbiter liegt das Hauptaugenmerk der Wissenschaftler um Li Chunlai bei der Mineralogie, der chemischen Zusammensetzung des Oberflächenmaterials. Im Zusammenwirken mit dem Hyperspektraldetektor auf dem Orbiter sucht man mittels der Multispektralkamera und dem Mars Surface Composition Detector links vorne auf dem Gehäuse speziell nach Mineralien, die durch Verwitterung bzw. Interaktion mit Oberflächenwasser entstanden, wie zum Beispiel Karbonatgesteine (mit besonderem Augenmerk auf Hämatit), Schichtsilikate, hydratisierte Sulfate und Perchlorate. Auf diese Art will man einen Einblick in die Umweltbedingungen erhalten, die in der Vergangenheit, als es dort noch flüssiges Wasser gab, auf dem Mars geherrscht haben müssen.[26]
Der Mars besitzt seit etwa 500 Millionen Jahren kein globales Magnetfeld mehr. Es gibt jedoch noch eine gebietsweise Magnetisierung der planetaren Kruste. Mit dem Fluxgate-Magnetometer auf dem Rover soll die feinmaßstäbliche Struktur der Krustenmagnetisierung entlang des Weges, den Zhurong zurücklegt, dokumentiert werden. Sprunghafte Veränderungen des lokalen Magnetfelds würden auf größere Strukturen im Inneren des Planeten hinweisen. Man hofft, so auch einen Einblick in die Dicke der Schalen des Mars und die im Inneren des Planeten herrschenden Temperaturen zu erhalten.[26]
Wie die Erde besitzt der Mars eine ionosphärische Dynamoschicht, in der leitendes ionosphärisches Plasma durch atmosphärische Gezeiten gegen die Kraftlinien der schwachen lokalen Magnetfelder bewegt wird und dabei elektrische Ströme induziert werden. Das Magnetfeld solcher Ströme wirkt sich wiederum auf der Marsoberfläche als Schwankung des lokalen Magnetfelds aus. Durch Zusammenführung der Daten von den Magnetometern auf Rover und Orbiter können die Wissenschaftler die elektrische Leitfähigkeit der Marsionosphäre studieren.[6]
Die Gesamtmenge der bis zum 31. Januar 2022 von Rover und Orbiter an die Erde übertragenen Rohdaten betrug 600 GB.[64]
Marskalender
Zhurong kam am 14. Mai 2021 mitten im Frühling auf der Nordhalbkugel des Mars an. An sich war zu diesem Zeitpunkt noch mit Frühjahrsstürmen zu rechnen. Diese blieben in jenem Jahr jedoch aus – auf einem am 30. August 2021 vom Orbiter mit seiner hochauflösenden panchromatischen Kamera aufgenommenen Bild sind selbst die damals mehr als drei Monate alten ersten Fahrspuren des Rovers noch klar zu erkennen.[59] Die nächste Staubsturm-Saison beginnt, nachdem der Mars wieder den sonnennächsten Punkt seiner Umlaufbahn erreicht hat, das Perihel im Juni 2022.[70][71] Sun Zezhou, der Chefkonstrukteur von Tianwen-1, erläuterte im Dezember 2021, dass die gefährliche Zeit für Zhurong Ende 2022 kommen würde, wenn die Staubstürme mit der geringeren Sonneneinstrahlung, also der geringeren Stromerzeugung der Solarmodule im Winter zusammenfallen und dem Rover das Fortkommen erschweren würden.[7] Hier der Marskalender bis 2023:
| Ereignis | 2020/'21 | 2022/'23 |
|---|---|---|
| Herbstbeginn | 8. April 2020 | 24. Februar 2022 |
| Perihel | 3. August 2020 | 21. Juni 2022 |
| Winterbeginn | 2. September 2020 | 21. Juli 2022 |
| Frühlingsbeginn | 7. Februar 2021 | 26. Dezember 2022 |
| Aphel | 13. Juli 2021 | 30. Mai 2023 |
| Sommerbeginn | 25. August 2021 | 12. Juli 2023 |
Falls die Wetterstation des Rovers über einen längeren Zeitraum funktionsfähig bleiben sollte, will man Daten über die jahreszeitlichen Veränderungen des Wetters in der Utopia Planitia sammeln und sie mit den Daten korrelieren, die die beiden Teilchendetektoren auf dem Orbiter in der Ionosphäre ermitteln, also eventuell einen Zusammenhang zwischen Weltraumwetter, insbesondere den energetischen Partikeln von Sonneneruptionen, und Oberflächenwetter herstellen.[26] Aus der Form der vom Rover und aus dem Orbit fotografierten Sanddünen schließen die Wissenschaftler, dass die Winde an der Landestelle überwiegend aus nordöstlicher in südwestliche Richtung wehen.[72]
Kontaminationsvermeidung
An der Landestelle von Zhurong in der Utopia Planitia gibt es kein Wassereis nahe der Oberfläche, das heißt, sie fällt nicht in die Kategorie IVc (Sonderzone) der COSPAR-Regeln für den Schutz von Planeten.[73] Da der Rover reine Geologie und Astrophysik betreibt und keine Geräte zum Aufspüren von Lebensformen auf dem Mars mitführt, fällt die Mission stattdessen in die Kategorie IVa, bei der der Ausschuss für Weltraumforschung im Jahr 1994 empfahl, dass sich auf den betreffenden Raumflugkörpern nicht mehr als 300 Sporen pro Quadratmeter und insgesamt nicht mehr als 300.000 Sporen befinden sollten, um eine Kontamination des Mars mit irdischen Mikroorganismen zu vermeiden. Für die Einhaltung dieses Standards ist die Chinesische Akademie für Weltraumtechnologie (CAST) als Herstellerfirma der Sonde zuständig. Zu diesem Zweck ist man seit 2016, als das Marsprogramm der Volksrepublik China gestartet wurde, in Kontakt mit internationalen Experten. Die tatsächliche Desinfizierung von Lander und Rover wurde von der Pekinger Shenzhou Astrobiologie GmbH (航天神舟生物科技集团有限公司) durchgeführt,[74] einer Tochterfirma von CAST,[75] mit Unterstützung des Forschungszentrums für astrobiologische Projekte der China Aerospace Science and Technology Corporation (中国航天科技集团公司空间生物工程研究中心)[76] sowie des Technischen Forschungszentrums für astrobiologische Projekte der Stadt Peking (北京市空间生物工程技术研究中心).[77]
Name

Beim Start der Raumsonde war der Rover zunächst namenlos. Am 24. Juli 2020 startete das Zentrum für Monderkundungs- und Raumfahrt-Projekte der Nationalen Raumfahrtbehörde einen internationalen Wettbewerb, bei dem alle Raumfahrtinteressierten bis zum 12. August 2020 Vorschläge für den Namen des Rovers einreichen konnten. Anschließend traf eine Kommission eine Vorauswahl der zehn besten Vorschläge, aus denen in einer Online-Abstimmung vom 20. Januar bis zum 28. Februar 2021 drei Namen ausgewählt werden konnten. Aus diesen drei Namen, Zhurong, Nezha und Hongyi („Entschlossenheit“),[78] wählte eine Kommission den endgültigen Namen aus,[79][80] der am 24. April 2021, dem chinesischen Tag der Raumfahrt, offiziell bekanntgegeben wurde. Zhurong ist ein spätneolithischer Küchengott, der um 500 v. Chr., zu Beginn der Zeit der Streitenden Reiche, zum Gott des Feuers aufstieg. Durch den konfuzianischen Atheismus sank seine Bedeutung jedoch wieder und er wurde zu einer von vielen kleineren Gottheiten im chinesischen Volksglauben, vor allem in der Provinz Hunan. Reichskanzler Zhang Yue (张说, 667–730) bezeichnet ihn in seinem Aufsatz „Lobpreisung der Pujin-Brücke“ (蒲津桥赞) wieder nur als Herdgott.[81] Der Name Zhurong soll außerdem den chinesischen Namen für den roten Planeten Huoxing (Feuerplanet) spiegeln.[82] Im Rahmen der Chinesischen Planetenerkundung soll Zhurong nun das Feuer entfachen und die gesamte Menschheit zu einer weiteren Erkundung der unbekannten Weiten des Weltalls führen.[1]
Weblinks
- Video von der Entwicklung des Fahrsystems (chinesisch mit englischen Untertiteln)
- Video der verschiedenen Fahrmodi (chinesisch)
Einzelnachweise
- 我国火星车正式命名. In: spaceflightfans.cn. 24. April 2021, abgerufen am 24. April 2021 (chinesisch).
- 喻晓璇: “祝融号”火星车顺利发回遥测信号,着陆具体坐标公布. In: thepaper.cn. 15. Mai 2021, abgerufen am 20. Mai 2021 (chinesisch).
- Steven Lee Myers, Kenneth Chang: China's Mars Rover Mission Lands on the Red Planet. In: The New York Times, 14. Mai 2021. Abgerufen am 16. Mai 2021.
- 2020中国火星探测计划(根据叶院士报告整理). In: spaceflightfans.cn. 14. März 2018, abgerufen am 21. Mai 2021 (chinesisch).
- 火星探测步步惊心,不是探月的简单“复制”和“粘贴”. In: tech.sina.com.cn. 3. August 2020, abgerufen am 4. August 2020 (chinesisch).
- Li Chunlai, Zhang Rongqiao, Yu Dengyun et al.: China’s Mars Exploration Mission and Science Investigation. (PDF; 3,7 MB) In: springer.com. 25. Mai 2021, abgerufen am 11. Juni 2021 (englisch).
- 火星冬季长达6个月,祝融号火星车怎么办?两套御寒装备至关重要. In: sohu.com. 5. Januar 2022, abgerufen am 10. Februar 2022 (chinesisch).
- 天问一号四大不可不知的亮点. In: tech.sina.com.cn. 15. Juli 2020, abgerufen am 16. Juli 2020 (chinesisch).
- 祝融号两器合影亮点纷呈:进入舱背罩出镜,变推发动机蹲出大坑. In: sohu.com. 11. Juni 2021, abgerufen am 12. Juni 2021 (chinesisch).
- 焦点访谈:“天问一号”要成功奔向火星,还得闯多少关? In: yicai.com. 25. Juli 2020, abgerufen am 23. April 2021 (chinesisch).
- 天问一号火星车采用超疏基结构,用于解决太阳能电池板防尘难题. In: ithome.com. 28. Februar 2021, abgerufen am 1. März 2021 (chinesisch).
- 耿言 et al.: 我国首次火星探测任务. In: jdse.bit.edu.cn. 28. Juni 2018, abgerufen am 23. April 2021 (chinesisch).
- Video from Mars taken by Zhurong Mars Rover 祝融号火星车火星视频 (ab 0:01:03) auf YouTube, 27. Juni 2021, abgerufen am 27. Juni 2021.
- 中国首辆火星车定名“祝融号”. In: german.china.org.cn. 7. Mai 2021, abgerufen am 24. Mai 2021 (chinesisch).
- 潘冬 et al.: 火星车系统动力学建模与仿真分析. (PDF; 1,3 MB) In: jdse.bit.edu.cn. 1. August 2020, abgerufen am 22. Mai 2021 (chinesisch).
- 李春来 et al.: 中国首次火星探测任务科学目标与有效载荷配置. In: jdse.bit.edu.cn. 21. März 2018, abgerufen am 27. Juli 2020 (chinesisch).
- New photos and Easter eggs of Tianwen-1 probe Zhurong rover landing on Mars 天问一号(祝融号火星车)着陆火星新照片与彩蛋 (ab 0:00:19) auf YouTube, 11. Juni 2021, abgerufen am 12. Juni 2021.
- Andrew Jones: Here's What You Need to Know About China's Mars Rover. In: spectrum.ieee.org. 21. März 2021, abgerufen am 26. April 2021 (chinesisch).
- Zhou Bin et al.: The subsurface penetrating radar on the rover of China’s Mars 2020 mission. In: ieeexplore.ieee.org. 22. September 2016, abgerufen am 5. Juli 2019 (englisch).
- 舒嵘 et al.: 深空探测中的激光诱导击穿光谱探测仪. In: jdse.bit.edu.cn. 21. März 2018, abgerufen am 24. April 2021 (chinesisch). Dieses Institut hatte schon den Laser-Entfernungsmesser und den dreidimensional abbildenden Laserscanner für das automatische Hindernisvermeidungs- und Landesystem der Mondsonde Chang’e-4 gebaut.
- Stephen Clark: China launches robotic mission to orbit, land, and drive on Mars. In: spaceflightnow.com. 23. Juli 2020, abgerufen am 24. April 2021 (englisch).
- Products. In: magson.de. Abgerufen am 25. April 2021 (englisch).
- 赵琳 et al.: 火星车磁通门磁强计技术. In: jdse.bit.edu.cn. 1. Oktober 2018, abgerufen am 25. April 2021 (chinesisch).
- 许琦敏: “天问一号”启程,探测火星它带上了哪些“神器”? In: sohu.com. 23. Juli 2020, abgerufen am 23. April 2021 (chinesisch).
- Der Luftdruck auf dem Nullniveau des Mars beträgt 600 Pa, die Primärlandestelle des Rovers liegt etwa 4000 m unterhalb des Nullniveaus.
- Jia Yingzhuo, Fan Yu, Zou Yongliao: Scientific Objectives and Payloads of Chinese First Mars Exploration. (PDF; 332 kB) In: nssc.cas.cn. 6. September 2018, abgerufen am 15. Juni 2021 (englisch).
- Smriti Mallapaty: China’s Mars rover returns first images — scientists say the view is promising. In: nature.com. 20. Mai 2021, abgerufen am 12. Juni 2021 (englisch).
- 李学磊: 国家航天局举办新闻发布会 介绍我国首次火星探测任务情况. In: gov.cn. 12. Juni 2021, abgerufen am 14. Juni 2021 (chinesisch).
- 孙泽洲从“探月”到“探火” 一步一个脚印. In: cast.cn. 26. Oktober 2016, abgerufen am 12. Dezember 2019 (chinesisch).
- 中国探空火箭成功实验火星探测器降落伞技术. In: guancha.cn. 5. September 2018, abgerufen am 20. Mai 2021 (chinesisch).
- HOW ON EARTH did China succeed in landing Zhurong rover on Mars? Review of CNSA deep space missions (ab 0:14:10) auf YouTube, 13. Juni 2021, abgerufen am 17. Juni 2021.
- Close-Up of Zhurong’s Parachute auf YouTube, 15. Juli 2021, abgerufen am 16. Juli 2021.
- 肖欢欢: “祝融号”火星车即将驶出 即将实施两器互拍. In: 163.com. 17. Mai 2021, abgerufen am 20. Mai 2021 (chinesisch).
- 中国首张火星表面照片来了!为什么用了4天,而美国只用20分钟? In: 360doc.com. 20. Mai 2021, abgerufen am 21. Mai 2021 (chinesisch).
- 中国火星车登陆 为什么还没照片?对地"网速"只有16bps. In: finance.sina.com.cn. 17. Mai 2021, abgerufen am 21. Mai 2021 (chinesisch).
- 天问一号着陆过程两器分离和落火影像发布. In: cnsa.gov.cn. 19. Mai 2021, abgerufen am 20. Mai 2021 (chinesisch). Das obere Foto wurde mit der Hindernisvermeidungskamera aufgenommen (rechts unten ein Vorderrad des Rovers), das zweite Foto mit der nach hinten gedrehten topografischen Stereokamera. Die Videosequenzen wurden vom Orbiter aufgenommen und zeigen das Abkoppeln der Lander-Rover-Gruppe vor der Landung am 14. Mai 2021.
- 中国首张火星表面照片来了!为什么用了4天,而美国只用20分钟? In: 360doc.com. 20. Mai 2021, abgerufen am 21. Mai 2021 (chinesisch).
- 刘庆会: 火星探测VLBI测定轨技术. In: jdse.bit.edu.cn. 5. Mai 2018, abgerufen am 23. April 2021 (chinesisch).
- 金立旺: “祝融号”火星车成功驶上火星表面. In: xinhuanet.com. 22. Mai 2021, abgerufen am 22. Mai 2021 (chinesisch).
- “祝融号”火星车成功驶上火星表面. In: cnsa.gov.cn. 22. Mai 2021, abgerufen am 22. Mai 2021 (chinesisch).
- 我国首次火星探测任务 “祝融号”火星车成功驶上火星表面|新闻来了 auf YouTube, 21. Mai 2021, abgerufen am 23. Mai 2021.
- 天问一号任务着陆和巡视探测系列实拍影像发布. In: clep.org.cn. 27. Juni 2021, abgerufen am 27. Juni 2021 (chinesisch).
- 蔡金曼、刘庆丰、张未: 中国火星车两器合影,着陆点360全景,还有那鲜艳的国旗! In: spaceflightfans.cn. 11. Juni 2021, abgerufen am 11. Juni 2021 (chinesisch). Die Figuren links von der Landesfahne sind die Maskottchen der Olympische Winterspiele bzw. Winter-Paralympics 2022.
- 蔡金曼、刘庆丰、张未: 国家航天局举行天问一号探测器着陆火星首批科学影像图揭幕仪式. In: clep.org.cn. 11. Juni 2021, abgerufen am 11. Juni 2021 (chinesisch).
- 郭凯: New images of Mars unveiled. Abgerufen am 16. Juni 2021 (englisch).
- Smriti Mallapaty: Flurry of photos capture China’s Zhurong rover on surface of Mars. In: nature.com. 11. Juni 2021, abgerufen am 12. Juni 2021 (englisch).
- 天问一号火星车高清正脸照公开,国旗亮眼!额头上有一古代篆文. In: sohu.com. 6. April 2021, abgerufen am 16. Mai 2021 (chinesisch).
- 天问一号祝融火星车. In: weibo.com. 23. Mai 2021, abgerufen am 1. Juni 2021 (chinesisch).
- 祝融号火星巡航速度仅每小时40米:火星环境恶劣,初来乍到谨慎为上. In: 163.com. 29. Mai 2021, abgerufen am 1. Juni 2021 (chinesisch).
- “祝融”行驶超410米!新发的照片很神奇. In: spaceflightfans.cn. 12. Juli 2021, abgerufen am 12. Juli 2021 (chinesisch).
- 赵磊: 国家航天局发布最新火星影像:祝融在火星上找到自己的伞了. In: chinadaily.com.cn. 15. Juli 2021, abgerufen am 15. Juli 2021 (chinesisch).
- Andrew Jones: China’s Zhurong Mars rover visits own parachute. In: spacenews.com. 15. Juli 2021, abgerufen am 15. Juli 2021 (englisch).
- 嫦娥四号顺利唤醒,进入第27月昼工作期. In: spaceflightfans.cn. 7. Februar 2021, abgerufen am 16. Juli 2021 (chinesisch).
- 王士铭: “祝融号”比“玉兔二号”跑得快!和距离地球远近还有关系? In: mp.weixin.qq.com. 13. Juli 2021, abgerufen am 16. Juli 2021 (chinesisch).
- “祝融号”火星车开始穿越复杂地形地带. In: spaceflightfans.cn. 30. Juli 2021, abgerufen am 6. August 2021 (chinesisch). Enthält unverzerrtes, mit der topografischen Kamera aufgenommenes Farbfoto des Geländes.
- 祝融号行驶里程突破800米正穿越复杂地带. In: xinhuanet.com. 6. August 2021, abgerufen am 6. August 2021 (chinesisch).
- “祝融号”火星车完成既定探测任务,后续将开展拓展任务! In: spaceflightfans.cn. 17. August 2021, abgerufen am 17. August 2021 (chinesisch). Bei den gelben Wegetappen auf der durch Daraufklicken vergrößerbaren Karte fuhr der Rover problemlos voran, auf den hellgrünen Wegetappen vor den Navigationspunkten hatte sich das automatische Hindernisvermeidungssystem aktiviert.
- CCTV reporter Cui Xia Xu Jing Wu Tianbai, National Space Administration Geng Yan Chen Gang: “祝融号”行驶里程突破800米 正穿越复杂地带. 央视新闻.“ 6. August 2021, abgerufen am 6. August 2021 (chinesisch).
- “祝融号”驶上火星表面满百天 中国首次火星探测任务成功金银纪念币发行仪式在京举行. In: cnsa.gov.cn. 30. August 2021, abgerufen am 31. August 2021 (chinesisch).
- 自立自强,航天专家揭秘中国探火科技创新. In: sohu.com. 9. Oktober 2021, abgerufen am 11. Oktober 2021 (chinesisch).
- Joe Michalski: What science is ahead for the Zhurong Rover in Utopia Planitia? In: nature.com. 17. Mai 2021, abgerufen am 17. August 2021 (englisch).
- 空间中心科研人员在“天问一号”着陆区地质背景研究方面取得进展. In: nssc.ac.cn. 24. August 2021, abgerufen am 2. September 2021 (chinesisch).
- 耿言、陈刚: 天问一号环绕器进入遥感使命轨道. In: mp.weixin.qq.com. 8. November 2021, abgerufen am 8. November 2021 (chinesisch).
- 天问一号传回“新春祝福”视频. In: mp.weixin.qq.com. 31. Januar 2022, abgerufen am 31. Januar 2022 (chinesisch).
- Andrew Jones: At Mars, China's Tianwen 1 orbiter and Zhurong rover are back in action after a radio blackout. In: space.com. 22. Oktober 2021, abgerufen am 23. Oktober 2021 (englisch).
- Josh Tapley: Mars Express keeps an ear out for Chinese rover. In: esa.int. 27. Oktober 2021, abgerufen am 28. Oktober 2021 (englisch).
- Andrew Jones: Europe's Mars orbiter relays data from Chinese rover back to Earth. In: space.com. 12. Dezember 2021, abgerufen am 12. Dezember 2021 (englisch).
- 耿言、陈刚: 中欧火星探测器成功开展在轨中继通信试验. In: mp.weixin.qq.com. 1. Dezember 2021, abgerufen am 1. Dezember 2021 (chinesisch).
- A one-way phone call at Mars. In: esa.int. 1. Dezember 2021, abgerufen am 1. Dezember 2021 (englisch).
- Mars' Calendar. In: planetary.org. Abgerufen am 24. Mai 2021 (englisch).
- Dominic Ford: Mars at perihelion. In: in-the-sky.org. 23. Mai 2021, abgerufen am 24. Mai 2021 (englisch).
- Ding Liang et al.: Localization and Surface Characterization by Zhurong Mars Rover at Utopia Planitia. (PDF; 3,9 MB) In: researchsquare.com. 24. September 2021, S. 27, abgerufen am 5. Oktober 2021 (englisch).
- Meghan Bartels: Here's what we know about planetary protection on China's Tianwen-1 Mars mission. In: space.com. 25. Februar 2021, abgerufen am 27. April 2021 (englisch).
- 徐侃彦 et al.: 火星无人探测与行星保护. In: jdse.bit.edu.cn. 1. Februar 2019, abgerufen am 27. April 2021 (chinesisch).
- 航天神舟生物科技集团有限公司. In: cast.cn. 21. April 2016, abgerufen am 27. April 2021 (chinesisch).
- 航天科技集团成立空间生物工程研究中心. In: sasac.gov.cn. 13. Oktober 2010, abgerufen am 27. April 2021 (chinesisch).
- 北京市空间生物工程技术研究中心. In: bjkjcxjd.cn. Abgerufen am 27. April 2021 (chinesisch).
- Drei Namen nach weltweiter Umfrage zur Auswahl für Chinas Mars-Rover. In: china.org.cn. 3. März 2021, abgerufen am 8. April 2021.
- 胡喆: 我国第一辆火星车正式启动全球征名. In: gov.cn. 24. Juli 2020, abgerufen am 25. Juli 2020 (chinesisch).
- 胡喆: 麒麟、哪吒、风火轮……你“Pick”哪一个? In: xinhuanet.com. 18. Januar 2021, abgerufen am 18. Januar 2021 (chinesisch).
- 罗竹风(主编):汉语大词典. 第七卷. 汉语大词典出版社, 上海 1994(第二次印刷), S. 895 f.
- 谭欣雨: China releases new Mars image taken by Tianwen 1 probe. Abgerufen am 16. Juni 2021 (englisch).

„Mars“-Raumsonden (1960–1973) | Mariner 3,4,6–9 (1964–1971) | Zond 2 (1964) | Viking 1,2 (1975) | Fobos 1,2 (1988) | Mars Observer (1993) | Mars Global Surveyor (1996) | Mars 96 (1996) | Mars Pathfinder mit Sojourner (1996) | Nozomi (1998) | Mars Climate Orbiter (1998) | Mars Polar Lander mit Deep Space 2 (1999) | 2001 Mars Odyssey (2001) | Mars Express mit Beagle 2 (2003) | Mars Exploration Rover mit Spirit (2003) und Opportunity (2003) | Mars Reconnaissance Orbiter (2005) | Phoenix (2007) | Phobos-Grunt (2011) | Yinghuo-1 (2011) | Curiosity (2011) | Mars Orbiter Mission (2013) | MAVEN (2013) | ExoMars Trace Gas Orbiter (2016) | Schiaparelli (2016) | InSight (2018) | al-Amal (2020) | Tianwen-1 mit Zhurong (2020) | Perseverance mit Ingenuity (2020)
Geplante Missionen
ExoMars Rover (2022) |
Martian Moons Exploration (2024)
Kursiv geschriebene Missionen sind aktiv.
Gestrichene Missionen: Mars Surveyor 2001 | Mars Telecommunications Orbiter | Mars Science and Telecommunications Orbiter | P5A | Red Dragon
(Siehe auch: Liste von künstlichen Objekten auf dem Mars | Chronologie der Marsmissionen)