Jadehase (Rover)
Jadehase oder Yutu (chinesisch 玉兔號月球車 / 玉兔号月球车, Pinyin Yùtùhào yuèqiúchē – „Jadehase-Mondfahrzeug“, kurz 玉兔號 / 玉兔号, Yùtùhào) ist ein sechsrädriger Mondrover, der bei der Mission Chang’e 3 der Nationalen Raumfahrtbehörde Chinas (CNSA) im Rahmen des Mondprogramms der Volksrepublik China auf dem Mond abgesetzt wurde.[1][2] Der Rover erlitt nach sechs Wochen Betriebsschwierigkeiten,[3] nachdem er die erste 14-tägige Mondnacht überstanden hatte.[4] Nach der zweiten Mondnacht war er bewegungsunfähig, konnte aber von seiner nun fixen Position aus weiterhin nützliche Daten sammeln.[5] Am 31. Juli 2016 stellte Jadehase nach insgesamt 31 Monaten seinen Betrieb ein, was deutlich länger als seine erwartete Lebensdauer von drei Monaten war.[6]

Geschichte der Mission
Schon seit 1998, also vier Jahre nachdem die Projektgruppe Monderkundung der Chinesischen Akademie der Wissenschaften die erste Machbarkeitsstudie für ein Monderkundungsprogramm vorgelegt hatte, arbeiteten rund ein Dutzend Forschungsinstitute an Prototypen für einen Mondrover. So besaß zum Beispiel das Modell der Fakultät für Informatik der Tsinghua-Universität in Peking sechs einzeln angetriebene Räder und konnte neben der Erhitzung von Bodenproben und spektrographischer Untersuchung derselben auch Proben von Helium-3 entnehmen.[7] Als man 2008, also zwei Jahre vor dem Start von Chang’e 2, mit den Vorbereitungen für die Mission Chang’e 3 begann, erhielt jedoch das Konzept der Chinesischen Akademie für Weltraumtechnologie den Zuschlag. Für die konkrete Entwicklung des Rovers war Jia Yang (贾阳, * 1970) zuständig, unter Ye Peijian stellvertretender Chefkonstrukteur der Sonde.[8]
Eines der größten Probleme waren die Räder. Während irdische Sandkörner von Wind und Wetter rundgeschliffen werden, sind die Regolith-Partikel auf dem Mond messerscharf und würden reguläre Radreifen in kurzer Zeit zerstören. Um mit diesem Problem zurechtzukommen, experimentierte die Gruppe um Jia Yang über einen Zeitraum von mehr als drei Jahren mit diversen Bereifungen, selbst mit Kettenfahrwerken. Schließlich bespannte man die Felgen der sechs Räder ähnlich wie bei den sowjetischen Lunochod-Rovern mit einer Art Fliegengitter aus Draht, durch dessen Löcher sich die spitzen Regolithkörner hindurchdrücken konnten. Dies reduzierte außerdem das Gewicht der Räder und verlieh der Bereifung eine gewisse Elastizität. Darüber ordnete man in Querrichtung senkrecht stehende Streifen aus Metall an, die wie Klauen für eine bessere Traktion sorgten.
Als der erste Prototyp fertiggestellt war, musste er unter möglichst realistischen Bedingungen getestet werden. Nach einer eingehenden in-situ Inspektion der Wüsten Nordwestchinas entschied man sich für ein nordwestlich von Dunhuang, Provinz Gansu, gelegenes Gebiet in der Kumtag-Wüste, wo aus Baracken eine temporäre Prüfbasis errichtet wurde. Mit auf dem Wüstensand verteilten Steinen wurde das autonome Hindernisvermeidungssystem getestet und dabei das Fahrgestell des Rovers immer weiter verbessert.[9]
Der Name des Rovers wurde in einer Onlineumfrage und anschließender Abstimmung von 3.445.248 Chinesen im In- und Ausland ausgewählt. Das Wort Jadehase (玉兔, yùtù) bezeichnet in der chinesischen Mythologie den Begleiter der Mondgöttin Chang’e (siehe Hase im Mond).[10]
Ziele der Mission
Wie bei den Raumfahrtprogrammen Chinas üblich, gab es bei der Mission Chang’e 3 sowohl technische Ziele, also die Erprobung von Technologien für die folgenden Missionen, als auch wissenschaftliche Ziele:
- Technische Ziele waren eine weiche Landung sowie der Einsatz eines Rovers auf dem Mond.[11]
- Die wissenschaftlichen Ziele für den Rover waren die Erkundung der lunaren Oberflächentopografie und der Zusammensetzung des Oberflächenmaterials sowie Radarmessungen der Struktur des Mondregoliths bis zu einer Tiefe von 140 Metern.
Aufbau des Rovers
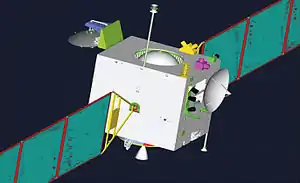
Die Maße des Rovers betragen ca. 1,5 × 1 × 1 Meter und das Gewicht 140 kg,[12] davon 20 kg wissenschaftliche Instrumente.[13] Damit ist er kleiner und wesentlich leichter als die Lunochod-Rover. Jadehase erhielt seine Energie durch zwei Solarpaneele, die ihm während der 14-tägigen Mondtage den Betrieb ermöglichten. Während der 14-tägigen Mondnächte ging der Rover in Bereitschaftsbetrieb.[14] Dabei erhielt er Wärme durch Radionuklid-Heizelemente mit Plutonium 238Pu[15] und Zweiphasen-Flüssigkeitsschleifen.[11] Damit konnte die Temperatur im Inneren des Gehäuses zwischen +55 °C und −20 °C gehalten werden, während die Außentemperaturen zwischen +110 °C und −180 °C schwankten.[16]
Die sechs Räder des Rovers wurden von jeweils einem bürstenlosen Gleichstrommotor einzeln angetrieben, die vorderen und die hinteren beiden Räder konnten um eine senkrechte Achse gedreht werden. Dadurch konnte der Rover nicht nur Kurven fahren, sondern sich auch an Ort und Stelle um sich selbst drehen, er konnte „zurückblicken“, um den freigelegten Regolith in seinen Fahrspuren zu spektrografieren. Das Fahrgestell beruht auf dem Prinzip des Doppelachsaggregats, mit dem langen Arm des Hauptwaagebalkens in Fahrtrichtung vorne. Damit konnten die Räder auch bei Unebenheiten ständig Bodenkontakt halten, während das Gehäuse im Gleichgewicht blieb. Bei Tests auf der Erde konnte der Rover Steigungen von bis zu 20° bewältigen und über Hindernisse von bis zu 20 cm hinwegfahren.[17] Die Unterseite des Gehäuses lag bei ebenem Untergrund 30 cm über dem Boden.[18]
Durch die Signallaufzeit von 2,5 Sekunden vom Mond zur Erde und zurück ist eine direkte Fernsteuerung von Mondfahrzeugen schwierig. Die Techniker im Raumfahrtkontrollzentrum Peking gaben dem Rover zwar Zielpunkte vor, den Weg dorthin musste er sich jedoch selbst suchen. Hierfür war er mit zwei Navigationskameras im „Kopf“ an der Mastspitze sowie zwei Hindernisvermeidungskameras unten am Gehäuse ausgestattet, die jeweils Stereobilder lieferten, aus denen sich Jadehase mittels Delaunay-Triangulierung eine topografische Karte seiner Umgebung berechnete.[17] Außerdem besitzt der Rover folgende Nutzlasten:
- Panoramakamera im „Kopf“ mit zwei 20 cm voneinander entfernten Objektiven für Stereoaufnahmen im Bereich von 3 m – ∞, schwenkbar um 360° in der horizontalen und 90° in der vertikalen Richtung.[16][19]
- Auf zwei Frequenzen arbeitendes Bodenradar[20][18]
- Infrarotspektrometer
- Alphapartikel-Röntgenspektrometer (APXS) an einem mechanischen Arm.[16]
Ablauf der Mission

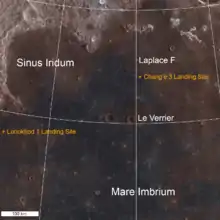
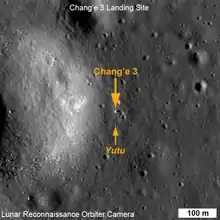
Jadehase wurde, befestigt auf der Oberseite des Landers der Sonde Chang’e 3, am 1. Dezember 2013 um 17:30 Uhr UTC gestartet und landete am 14. Dezember 2013 um 13:11 Uhr UTC, vier Tage nach dem örtlichen Sonnenaufgang, im Mare Imbrium auf der erdzugewandten Seite des Mondes.[21] Dies war die erste weiche Landung auf dem Mond seit 1976 und der erste Einsatz eines Mondrovers, seit Lunochod 2 am 11. Mai 1973 außer Betrieb ging. Gut sieben Stunden nach der Landung, am 14. Dezember 2013 um 20:35 Uhr UTC, rollte der Rover über eine Rampe auf die Mondoberfläche.
Erster Mondtag
Nachdem er um den 17. Dezember 2013 einen kurzen Mittagsschlaf gehalten hatte, war die erste Aufgabe, die Jadehase bis zum 22. Dezember 2014 erfüllte, den Lander von verschiedenen Blickwinkeln aus zu fotografieren, während er selbst umgekehrt auch vom Lander aus gefilmt und fotografiert wurde. Eine Anzahl dieser Bilder wurde veröffentlicht. Anschließend, am 22. Dezember 2013 um 21:00 Uhr UTC, wurde erstmals der mechanische Arm an der Vorderseite des Gehäuses entfaltet und der Sensor des Alphapartikel-Röntgenspektrometers nahe an den Mondboden gebracht. Der Positionierungsvorgang dauerte etwa eine halbe Stunde, dann wurde die Funktionalität des Instruments an einer mitgeführten Kalibrierungsprobe überprüft. Danach wurde der Arm wieder in seine Ruheposition am Gehäuse gebracht.[22] Die erste tatsächliche Messung der Bodenzusammensetzung mit Hilfe des Röntgenspektrometers fand am 25. Dezember 2013 statt.[23]
Die erste Mondnacht verbrachte der Rover etwa 40 Meter südlich des Landers. Er drehte sich mit der Vorderseite nach Süden, sodass das unbewegliche, in Fahrtrichtung linke Solarmodul nach Osten zeigte. Dann klappte der Rover den Mast mit der Parabolantenne und den Kameras nach hinten in sein Gehäuse und klappt den beweglichen Solarzellenflügel darüber, um das Gehäuse zu verschließen und sich vor der nächtlichen Kälte zu schützen. Am 25. Dezember gingen der Lander und am 26. Dezember der Rover in den Schlafmodus über.
Zweiter Mondtag
Als die aufgehende Sonne nach dem Ende der Mondnacht auf das östliche Solarmodul schien, erwachte der Rover am 11. Januar 2014 aus seinem Standby und führte bis zur Mittagspause am 16. Januar eine weitere Inspektion des Mondbodens aus. Am 25. Januar 2014, sechs Wochen nach Beginn des Rover-Einsatzes und nahe dem Ende des zweiten Mondtages, stellten die Techniker im Raumfahrtkontrollzentrum Peking fest, dass sich eines der Räder des Rovers nicht mehr bewegte. Dadurch konnte sich Jadehase nicht nach Süden drehen und seine korrekte „Schlafposition“ einnehmen.[24]
Dritter Mondtag
Als die Sonne am 10. Februar 2014 wieder über der Landestelle aufgegangen war, konnte das Raumfahrtkontrollzentrum zunächst keine Kommunikation mit dem Rover aufnehmen und erklärte ihn deshalb für dauerhaft inoperativ. Nach zweitägigen unermüdlichen „Weckrufen“ der Tiefraumstation Giyamusi konnte jedoch am späten Abend des 12. Februar der Kontakt wiederhergestellt werden.[25][26] Zunächst wurde nur die Trägerwelle empfangen, später dann auch Telemetriesignale.[9] Es gelang jedoch nicht, das Fahrwerk wieder in Gang zu setzen.[5] Als am 22. Februar 2014 die dritte Mondnacht begann, war klar, dass der Rover zwar unbeweglich war, dass jedoch das Bodenradar, die Panoramakamera und das Infrarotspektrometer normal betriebsfähig waren.[27][28]
Weiterer Verlauf
Am 18. April 2014 erläuterte Wang Jianyu (王建宇, * 1959) von der Chinesischen Akademie der Wissenschaften,[29] dass gewisse Komponenten möglicherweise Frostschäden erlitten hätten. Dadurch, dass das rechte Solarmodul nicht in die „Schlafposition“ gefaltet werden konnte, konnte es nicht wie vorgesehen zur Wärmeisolierung der Elektronik während der Mondnacht dienen.[30] Obwohl die wissenschaftlichen Instrumente noch funktionierten – sie waren an sich nur für eine Lebensdauer von drei Monaten ausgelegt – war ihr Nutzen deutlich begrenzt, da der Rover seine Position nicht mehr verändern konnte.
Am 1. August 2016, während der 33. Mondnacht, gab die Nationale Raumfahrtbehörde Chinas bekannt, dass Jadehase am 31. Juli 2016 nach 972 Tagen, also mehr als 31 Erdenmonaten seinen Betrieb endgültig eingestellt hatte.[31][6] Während dieser Zeit hatte der Rover auf dem Mond insgesamt 114 Meter zurückgelegt.[32]
Weblinks
Einzelnachweise
- Leonard David: China Readying 1st Moon Rover for Launch This Year. space.com, 19. Juni 2013, abgerufen am 19. Juli 2013 (englisch).
- Raumfahrt: Chinesische Sonde soll noch 2013 auf dem Mond landen. spiegel.de, 29. August 2013, abgerufen am 29. August 2013.
- China's first moon rover has experienced a "mechanical control abnormality". Australian Broadcasting Corporation, 26. Januar 2014, abgerufen am 2. Februar 2021.
- Alan Boyle: Chinese moon lander and rover wake up after weeks of sleep. NBC News, 12. Januar 2014, abgerufen am 12. Dezember 2019.
- Euan McKirdy: Down but not out: Jade Rabbit comes back from the dead. In: CNN. 13. Februar 2014, abgerufen am 2. Februar 2021.
- 潘珊菊: "玉兔"退役发微博告别60万粉丝 两万网友催泪留言. In: xinhuanet.com. 4. August 2016, abgerufen am 12. Januar 2022 (chinesisch).
- 张晓娟、熊峰: 中国月球车在秘密研制中 权威人士透露有关详情. In: news.sina.com.cn. 20. Oktober 2002, abgerufen am 1. Mai 2019 (chinesisch).
- 居凌桢: 近期讲座20150416-0417. In: graduate.cqu.edu.cn. 16. April 2015, abgerufen am 10. Januar 2022 (chinesisch).
- 《我们的征途》第一集 17年探月工程 航天人经历了怎样的起伏与悲欢?Journey to the Moon EP1 (ab 0:26:05) auf YouTube, 27. Dezember 2021, abgerufen am 10. Januar 2022.
- 嫦娥三号月球车命名“玉兔号” 经全球征名产生. In: chinanews.com. 26. November 2013, abgerufen am 1. Mai 2019 (chinesisch).
- Sun Zezhou, Jia Yang und Zhang He: Technological advancements and promotion roles of Chang’e-3 lunar probe mission. In: link.springer.com. 28. September 2013, abgerufen am 12. Dezember 2019 (englisch).
- Zhao Lei: Most Chang'e-3 science tools activated. In: ChinaDaily. 18. Dezember 2013.
- Srinivas Laxman: Chang'e-3: China To Launch First Moon Rover In 2013. In: Asian Scientist. 7. März 2012, abgerufen am 2. Februar 2021.
- Moon rover Yutu sleeps as night comes. ChinaDaily, 26. Dezember 2013, abgerufen am 2. Februar 2021.
- Ralph L. McNutt Jr.: Radioisotope Power Systems: Pu-238 and ASRG status and the way forward. Johns Hopkins University. Januar 2014.
- 杭添仁: 玉兔号月球车探测器:灵活高效进行月面巡视. In: 163.com. 7. Dezember 2018, abgerufen am 11. Januar 2022 (chinesisch).
- Chang'e 3. SPACEFLIGHT101. Abgerufen am 2. Dezember 2013.
- Fang Guangyou et al.: Lunar Penetrating Radar onboard the Chang'e-3 mission. In: iopscience.iop.org. 29. September 2014, abgerufen am 12. Januar 2022 (englisch).
- Emily Lakdawalla: Chang'e 3 update with lots of pictures: Yutu begins lunar journey. The Planetary Society. 23. Dezember 2013.
- Su Yan, Fang Guangyou et al.: Data processing and initial results of Chang'e-3 lunar penetrating radar. In: iopscience.iop.org. 13. September 2014, abgerufen am 15. März 2020 (englisch).
- Paul Rincon: China lands Jade Rabbit robot rover on Moon. In: .bbc.co.uk. 14. Dezember 2013, abgerufen am 12. Januar 2022.
- 欧阳开宇、祁登峰: “玉兔”月球车机械臂投放测试成功. In: chinanews.com.cn. 23. Dezember 2013, abgerufen am 12. Januar 2022 (chinesisch).
- Ralph-Mirko Richter: Mondrover Yutu liefert erste wissenschaftliche Daten. In: raumfahrer.net. 3. Januar 2014, abgerufen am 12. Januar 2022.
- 胡潇潇、王彦玢: 航天事业“金不换” ,家国情怀融入血液. In: mp.weixin.qq.com. 13. November 2021, abgerufen am 14. November 2021 (chinesisch). Im Video ab 16:50.
- China's Jade Rabbit lunar rover 'could be saved'. In: bbc.com. 13. Februar 2014, abgerufen am 1. Oktober 2020 (englisch).
- 深空测控网:为“天问一号”指路. In: cnsa.gov.cn. 25. September 2020, abgerufen am 1. Oktober 2020 (chinesisch).
- Ken Kremer: Yutu Moon Rover Starts 3rd Night Time Hibernation But Technical Problems Persist. In: Universe Today. 23. Februar 2014, abgerufen am 2. Februar 2021.
- Wang Cong: China Focus: Uneasy rest begins for China's troubled Yutu rover. In: Renmin Ribao. 23. Februar 2014, abgerufen am 2. Februar 2021.
- 王建宇. In: people.ucas.ac.cn. Abgerufen am 12. Januar 2022 (chinesisch).
- Chen, Stephen, Last-ditch efforts to salvage mission of China's stricken Jade Rabbit lunar rover, South China Morning Post, 18. April 2014.
- 那只小兔子休息了:官方确认月球车玉兔停止工作. In: sohu.com. 2. August 2016, abgerufen am 12. Januar 2022 (chinesisch).
- Mike Wall: The Moon’s History Is Surprisingly Complex, Chinese Rover Finds. Auf: space.com. 12. März 2015.
| Jadehase (Alternativbezeichnungen des Lemmas) |
|---|
| Jadehase; Yutu; 玉兔, yùtù; Jade Rabbit, Chang'e-3-Rover; Jade-Kaninchen |