Jadehase 2
Jadehase 2 (chinesisch 玉兔二號 / 玉兔二号, Pinyin yùtù èr hào, englisch Jade Rabbit 2) ist der Rover der am 7. Dezember 2018 gestarteten chinesischen Mondmission Chang’e 4. Am 20. Dezember 2019, dem 20. Jahrestag der Wiedervereinigung mit Macau, hatte Jadehase 2 den 49 Jahre alten Rekord von Lunochod 1 als das am längsten auf der Mondoberfläche tätige Fahrzeug gebrochen.[1] Am 29. September 2021, zwei Tage vor dem chinesischen Nationalfeiertag, hatte der Rover genau 1000 Tage auf dem Mond verbracht.[2]
Mission
Nach der Landung im Von-Kármán-Krater des Südpol-Aitken-Beckens hat der Rover den Lander am 3. Januar 2019 um 22:22 Uhr nach Pekinger Zeit (14:22 GMT) über eine Rampe verlassen. Er ist der erste, der die Rückseite des Mondes befährt.[3] Der Rover der Chinesischen Weltraumbehörde (CNSA) ist nach dem Jadehasen der am 1. Dezember 2013 gestarteten chinesischen Mondmission Chang’e 3 der zweite Mondrover Chinas. Das Wort Jadehase (玉兔, yùtù) bezeichnet in der chinesischen Mythologie den Begleiter der Mondgöttin Chang’e (siehe Hase im Mond). Technischer Direktor des Mondprogramms der Volksrepublik China ist seit 2010 Wu Weiren. Bei der Herstellerfirma von Chang’e 4, der Chinesischen Akademie für Weltraumtechnologie, ist seit April 2016 Sun Zezhou der Chefkonstrukteur für die Mondsonden.[4] Der Rover selbst wird von drei Teams betreut:
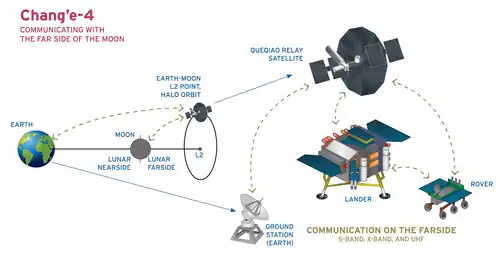
- Das Wissenschaftsteam (科学团队) analysiert die vom Rover über den Relaissatelliten Elsternbrücke an die Erde gefunkten Daten, weist auf die noch zu messenden Dinge hin und schlägt den jeweils nächsten Haltepunkt des Rovers vor.
- Das Planungsteam (计划团队) arbeitet entsprechend den Bedürfnissen des Wissenschaftsteams einen Messplan aus, bestimmt die Messpunkte und legt die Route fest, auf der der Rover zu diesen Punkten gelangt.
- Das Steuerteam (操控团队) schreibt die Befehlszeilen für den Rover und sorgt so dafür, dass Jadehase 2 an den gewünschten Punkten die gewünschten Messungen durchführt.[5]
Wenn die Mondnacht naht, sucht Jadehase 2 einen vorher ausgewählten, möglichst ebenen Schlafplatz auf. Dort dreht er sich mit der Vorderseite nach Süden, sodass das unbewegliche, in Fahrtrichtung linke Solarmodul nach Osten zeigt. Die von Radionuklid-Heizelementen mit insgesamt 120 W Leistung gespeiste Heizung wird von der Erde aus aktiviert.[6] Dann klappt der Rover den Mast mit der Parabolantenne und der dreidimensionalen Panoramakamera nach hinten in sein Gehäuse und klappt den beweglichen Solarzellenflügel darüber, um das Gehäuse zu verschließen und sich vor der Kälte zu schützen.
Wenn nach 14 Tagen die Sonne wieder aufgeht und die von dem linken Solarzellenflügel gelieferte Leistung ein gewisses Maß überschreitet, erwacht der Rover automatisch. Sein Zentralrechner schaltet sich ein, der bewegliche Solarzellenflügel und der Mast klappen aus, und Jadehase 2 baut selbstständig eine Funkverbindung mit dem Relaissatelliten Elsternbrücke auf. Das Steuerteam auf der Erde dreht den Rover in die gewünschte Marschrichtung, dann beginnt er seine Arbeit.[7]
Ein Mondtag dauert knapp 14 Erdentage, und etwa 24 Stunden nach Sonnenaufgang ist der Rover wieder einsatzbereit. Wenn ein geeigneter Schlafplatz in Reichweite ist, stellt er seine Arbeit etwa 24 Stunden vor Sonnenuntergang ein und beginnt mit den Vorbereitungen für die Nacht, wenn das Gelände absehbar schwierig wird, auch schon vorher. Außerdem geht Jadehase 2 während der Mittagszeit, wo die Temperatur bis auf 127 °C ansteigt, für 78 Stunden in einen Ruhemodus über, wo er sich nicht bewegt. Das bedeutet, der Rover fährt während eines lunaren Monats effektiv nur 9 Tage, während derer er auf hindernisfreien Strecken auch immer wieder stehenbleibt, sich umdreht und seine Fahrspuren spektrografiert.[8]
Während der vielen Monate, die Jadehase 2 mit der Erforschung des Von-Kármán-Kraters verbrachte, hatten die Techniker der Planungs- und Steuerteams reichlich Erfahrung mit der Steuerung eines Fahrzeugs auf einem fremden Himmelskörper gesammelt. Der Rover verfügt zwar über ein automatisches Hindernisvermeidungssystem (siehe unten), er ist jedoch nicht dazu in der Lage, längerfristig vorauszuplanen und zum Beispiel auf einer möglichst sicheren Route einen Hang hinaufzufahren. Derartige Dinge erfordern sorgfältige Planung, bis hin zur Führung des Rovers auf einem Serpentinenkurs, um den Neigungswinkel des Gehäuses möglichst gering zu halten.[9] Bei jedem Halt werden aus den Bildern der Navigations- und Hindernisvermeidungskameras digitale Höhenmodelle mit einer Auflösung von 2 cm erstellt, die für die weitere Routenplanung verwendet werden. Aus Faktoren wie Steigung, Exposition, Rauheit und Sichtweite des Geländes sowie den Parametern des Rovers werden mögliche Pfade berechnet und nach Risiko gewichtet.[10]
Bei der Marsmission Tianwen-1 sind die Anforderungen durch die Signallaufzeit von bis zu 40 Minuten noch wesentlich höher, daher wurden die Techniker, die im Raumfahrtkontrollzentrum Peking die Route des Marsrovers festlegen und programmieren sollen, aus den erfahrenen Mondteams ausgewählt.[11]
Aufbau
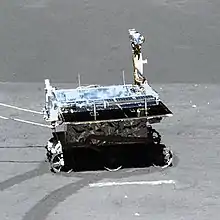
Das Gehäuse des Chang'e-4-Rovers ist ca. 1,5 × 1 × 1 Meter groß, sein Gewicht beträgt 135 kg. Damit ist er 5 kg leichter als der Jadehase von Chang’e 3 (anders als sein Vorgänger besitzt Jadehase 2 keinen mechanischen Arm). Er hat sechs Räder mit einem Durchmesser von 30 cm und einer Breite von 15 cm, deren Felgen mit einer Art Fliegengitter aus Draht bespannt sind, über dem in Querrichtung jeweils 24 senkrecht stehende, 1 cm hohe Streifen aus Metall befestigt sind, die wie Klauen für eine bessere Traktion sorgen. Die vorderen und die hinteren beiden Räder sind lenkbar, der Innenabstand zwischen den linken und rechten Rädern beträgt 80 cm.[12]
Die Bodenfreiheit beträgt 30 cm, der Rover kann Steigungen von bis zu 20° bewältigen und Hindernisse von bis zu 20 cm überklettern.[13] Steigungen von 10° werden jedoch bereits als riskant erachtet und nach Möglichkeit vermieden.[9] Das Gelände im Von-Kármán-Krater ist anspruchsvoller als im Mare Imbrium, wo Chang'e 3 gelandet war. Neben der Vielzahl von kleineren Einschlagkratern, denen der Rover aus dem Weg gehen muss (während der ersten zwei Jahre 88)[12] kommt es vor, dass ihm Felsbrocken im Weg stehen, woraufhin er automatisch komplizierte, mehrstufige Ausweichmanöver einleitet, um das Hindernis möglichst eng zu umfahren und nicht zu weit von seinem Weg abgelenkt zu werden.[14] Dadurch kommt Jadehase 2 trotz seiner Grundgeschwindigkeit von 5,5 cm/s (knapp 200 m/h) spürbar langsamer voran als sein Vorgänger.[15][16] Am 6. Februar 2021, zu Beginn des 27. Arbeitstags auf dem Mond, hatte Jadehase 2 laut seinem „Kilometerzähler“ seit Beginn der Mission 628,5 m zurückgelegt, er war zu diesem Zeitpunkt jedoch nur 430 m Luftlinie von der Landestelle entfernt.[17]
Oben auf dem Masten an der Vorderseite befindet sich in einer Höhe von etwa 1,9 m über dem Boden der „Kopf“ von Jadehase 2 mit vier Kameraaugen. Von vorne betrachtet liefern das erste und das dritte Objektiv von links die Bilder für die Stereo-Panoramakamera (siehe unten), das zweite und das vierte Objektiv von links liefern die Bilder für die Stereo-Navigationskamera. Letztere arbeitet mit Graustufen. Jedes Objektiv hat ein Sichtfeld von 46,6° × 46,6°. Die beiden Objektive sind 27 cm voneinander entfernt, sie besitzen eine Brennweite von 17,7 mm und eine effektive Bildgröße von 1024 × 1024 Pixeln. In der Mitte der Vorderfront des Rovers befindet sich in einer Höhe von etwa 75 cm über dem Boden die Stereo-Hindernisvermeidungskamera mit zwei dicht beieinanderliegenden Fischaugenobjektiven, die ein Sichtfeld von 170° × 170° und eine effektive Bildgröße von 1024 × 1024 Pixeln besitzen.[12]
Am 31. März 2019 erläuterte Liu Dianfu (刘殿富), der Leiter der für das Fortbewegungssystem des Rovers verantwortlichen Entwicklergruppe, dass Jadehase 2, falls es nicht zu unvorhergesehenen Zwischenfällen käme, noch mindestens 1 Jahr seiner Arbeit nachgehen könnte.[18] Dies traf dann auch ein. Am 6. Januar 2022, drei Jahre nach der Landung auf dem Mond, hatte der Rover mit 1003,9 m zurückgelegter Strecke die Kilometermarke durchbrochen.[19]
Die erste wirklich gefährliche Situation ergab sich am 5. Februar 2022, während des 39. Arbeitstags auf dem Mond. Nachdem er aus seinem mittäglichen Ruhemodus erwacht war, geriet der Rover auf unebenem Gelände in eine Situation, wo die rechte Seite des Gehäuses etwas höher kam als die linke. Dadurch lag mehr Druck auf den linken drei Rädern. Während der Rover mit der linken Seite einen kleinen Krater von etwa 20 cm Durchmesser überfuhr – an sich kein Hindernis – drückte das linke Vorderrad einen Teil der Kraterwand flach. Als nun das linke mittlere Rad über dem Krater war, hing es trotz des nach dem Prinzip des Doppelachsaggregats aufgebauten Fahrgestells kurzzeitig in der Luft. Damit wurde nun ein beträchtlicher Teil des Fahrzeuggewichts vom vorderen und hinteren Rad auf der linken Seite getragen. Das linke Vorderrad drückte sich zu stark in den Boden und konnte sich bei einer beabsichtigten Richtungsänderung nicht um die vertikale Achse drehen, woraufhin das autonome Fahrsystem des Rovers den Strom für den entsprechenden Motor abschaltete, um eine Überlastung zu vermeiden.
Dies war eine andere Situation als im Januar 2014 beim ersten Jadehasen. Hier war nicht wie damals der Antrieb des Rades betroffen, sondern nur der Motor für die Lenkung. Da jedoch die Mondnacht nahte und der Rover eine geeignete Stelle finden musste, wo er die korrekte Schlafstellung einnehmen konnte, musste das Problem zeitnah gelöst werden. Am Ende gaben die Ingenieure in Peking dem Rover den Befehl, auf demselben Weg, den er gekommen war, im Rückwärtsgang blind zurückzufahren (anders als der Marsrover Zhurong besitzt Jadehase 2 nur an der Vorderseite eine Hindernisvermeidungskamera). Nachdem der Rover einige Meter zurückgesetzt hatte, lenkten ihn die Ingenieure manuell schräg an der Gefahrenstelle vorbei. Es dauerte jeweils 2 Minuten, ein Kommando über den Relais-Satelliten Elsternbrücke an den Rover zu schicken und die Antwort von Telemetrie und Kameras abzuwarten.[20]
Wissenschaftliche Instrumente
Der Rover besitzt folgende Nutzlasten:[21]

- Panoramakamera (PCAM, Xi’aner Institut für Optik und Feinmechanik) mit einer Auflösung von bis zu 1 mm/Pixel,[22][23] um dreidimensionale Bilder von der Landestelle und des erkundeten Geländes für ein Studium der Oberflächenmorphologie und der geologischen Struktur zu erhalten.[24] Die Stereokamera mit einem Sichtfeld von 19,7° × 14,5° besitzt eine Optik für Aufnahmen im Bereich von 3 m – ∞, sie kann Aufnahmen im Spektrum des sichtbaren Lichts von 420 nm (blau) bis 700 nm (rot) entweder im Farbmodus oder im panchromatischen Modus machen. Im Farbmodus besitzt der CCD-Sensor eine effektive Pixelzahl von 2352 ×1728, im panchromatischen Modus 1176 × 864. Da die Panoramakamera ein sehr enges Sichtfeld hat (das Gesichtsfeld eines Menschen umfasst 214° × 140°), werden in der Regel mehrere Aufnahmen gemacht, während die Kamera auf dem Mast rotiert, und die Bilder anschließend beim Bodensegment des Mondprogramms zusammengesetzt. Das Foto des Landers besteht aus 6 Einzelaufnahmen, für ein 360°-Panorama werden 28 Aufnahmen pro Umdrehung verwendet und dann die Kamera für einen oder mehrere weitere Kreise nach oben oder unten geschwenkt, um das ganze Terrain vom Standpunkt des Rovers bis zum Horizont zu dokumentieren.[25]
- Bodenradar (Lunar Penetrating Radar, LPR, Institut für Informationsgewinnung durch Luft- und Raumfahrt), baugleich mit dem seines Vorgängers Jadehase,[26] zur Vermessung der Monduntergrundstruktur.[27][28] Das Bodenradar besitzt zwei Kanäle. Der eine arbeitet mit zwei 1,15 m langen Stabantennen am Heck auf einer Frequenz, die bei 60 MHz zentriert ist und eine Bandbreite von 40 MHz besitzt. Damit kann das Radar 100 m in die Tiefe blicken, mit einer vertikalen Auflösung von etwa 1 m. Der zweite Kanal arbeitet mit drei Flächendipolen von jeweils 33,6 × 12 cm Ausdehnung auf der Unterseite des Gehäuses. Hier ist die Frequenz bei 500 MHz zentriert, mit einer Bandbreite von 450 MHz. Damit kann der Rover 30 m in die Tiefe blicken, mit einer vertikalen Auflösung von 30 cm.[25]
- Abbildendes Infrarotspektrometer (Visible und Near-Infrared Imaging Spectrometer, VNIS, Shanghaier Institut für technische Physik).[29] Das Gerät ist an der Vorderseite des Gehäuses montiert und misst in einer Entfernung von 0,7–1,3 m auf einer Fläche mit einem Durchmesser von etwa 5 cm die mineralogische Zusammensetzung des Mondoberflächenmaterials.[30] Das Spektrometer arbeitet auf zwei Kanälen. Im sichtbaren Licht bis nahen Infrarot (450–950 nm) beträgt die spektrale Auflösung etwa 6 nm, im Infrarotbereich (900–2400 nm) beträgt sie 3–12 nm. Die Wortbreite der Quantisierung beträgt 10 bit.[25]
- Detektor für neutrale Atome (Advanced Small Analyzer for Neutrals, ASAN, Schwedisches Institut für Weltraumphysik) zur Beobachtung energieneutraler Atome und positiver Ionen im Bereich von 10 eV bis 10 keV,[25] das heißt der Strahlenbelastung im Schutz der örtlichen Minimagnetosphäre. Während üblicherweise etwa 20 % des auf die Mondoberfläche auftreffenden Sonnenwindes als energieneutrale Atome reflektiert werden,[31] stellte sich im Laufe der Mission heraus, dass der Reflexionsgrad westlich der Landestelle um 10 % höher lag. Die Geschwindigkeit des Sonnenwindes wurde durch die magnetische Anomalie um 12–18 % reduziert.[32]
Ungewöhnliche Beobachtungen
Als die Techniker im Raumfahrtkontrollzentrum Peking den Rover gegen Ende des 36. Arbeitstags auf dem Mond (29. Oktober bis 11. November 2021) eine Panoramaaufnahme von dem sehr schwierigen Gelände machen ließen, in das er geraten war, entdeckten sie am nördlichen Horizont in der Nähe eines relativ jungen Kraters ein aus Sicht von Jadehase 2 würfelförmig erscheinendes Gebilde, das zunächst „Mysteriöse Hütte“ (神秘小屋) getauft wurde. Die um Rat gefragten Wissenschaftler fanden auf Anhieb keine Erklärung und baten die Techniker, sich dem etwa 80 m entfernten Objekt möglichst zu nähern.[9] Bei dem einige dutzend Zentimeter großen Objekt handelt es sich wahrscheinlich um einen Felsbrocken, der beim Einschlag eines anderen Gesteinsbrockens auf dem Mond freigelegt wurde.[33]
Da ein von der Gruppe „Unser Weltraum“ (我们的太空, eine von der Parteizeitung Renmin Ribao, der amtlichen Nachrichtenagentur Xinhua, dem Fernsehsender CCTV und dem Verteidigungsministerium der Volksrepublik China gemeinsam betriebene Propagandaorganisation)[34][35] veröffentlichtes Foto des Objekts ein weltweites Medienecho ausgelöst hatte, erhöhte das Steuerteam am 37. Arbeitstag mit einer Reihe von Maßnahmen die Marschgeschwindigkeit des Rovers. So wurde der „Kopf“ von Jadehase 2, wo sich neben der Panoramakamera auch die Navigationskameras befinden, etwas nach oben gekippt, sodass sich deren Sichtweite von knapp 15 m auf über 30 m verdoppelte. Es mussten Maßnahmen getroffen werden, um die daraus resultierende Überbelichtung der Bilder, die das Navigationssystem des Rovers sah, herauszurechnen. Aber auf diese Art konnte die Strecke, die der Rover von Messpunkt zu Messpunkt selbstständig zurücklegte, vergrößert werden. Außerdem wurde die Mittagspause verkürzt. Durch einen späteren Beginn der Pause und einer früheren Wiederaufnahme der Arbeit konnte mehr als ein Erdentag Fahrtzeit gewonnen werden. In vier Schritten von 9, 11, 12 und 7 Metern – üblicherweise beträgt ein Schritt nicht mehr als 7 m – legte der Rover am örtlichen Vormittag 39 m zurück. Am Nachmittag begannen die Techniker mit der Suche nach einem geeigneten Schlafplatz für die Nacht. Dabei kam Jadehase 2 dem Objekt wieder etwas näher. Als er für den 37. Mondtag die Arbeit beendete, hatte er in sechs Schritten insgesamt 59,7 m zurückgelegt und war der „Mysteriösen Hütte“ auf gut 30 m nahegekommen.
Am 27. Dezember 2021 begann der 38. Arbeitstag auf dem Mond. In drei Schritten von 7, 9 und 10 Metern kam Jadehase 2 dem Objekt bis auf 10 m nahe. Wie erwartet handelte es sich um einen Felsbrocken auf dem Rand eines Kraters von 26 m Durchmesser.[20] Da die Form des Felsbrockens aus der Nähe betrachtet nicht würfelförmig war, sondern er eher wie ein kauernder Hase aussah, der auf eine vor ihm liegende Karotte (ein kleinerer Felsbrocken) blickte, erhielt er nun den Namen „Jadehase“ (玉兔).[19]
Weblinks
- Website des Instituts für Informationsgewinnung durch Luft- und Raumfahrt (englisch)
- Chang’e-4 Yutu-2 rover starts exploring the Von Karman Crater (Youtube-Video)
- Der «Jadehase» rollt los, während die Sonde Mond-Kartoffeln züchtet
- China lands Chang’e-4 mission on the far side of the Moon
- “玉兔二号”月球车顺利踏上月球背面!后续还将完成哪些使命? (chinesisch)
- “时间短、难度大、风险高”:专家详解月球背面着陆三大看点 (chinesisch)
Einzelnachweise
- “玉兔二号”:成月面工作时间最长月球车. In: clep.org.cn. 23. Dezember 2019, abgerufen am 23. Dezember 2019 (chinesisch).Lunochod 1 hatte allerdings mit 10,54 km eine wesentlich längere Strecke zurückgelegt.
- 千日征途——嫦娥四号月球背面工作突破1000天. In: mp.weixin.qq.com. 29. September 2021, abgerufen am 29. September 2021 (chinesisch).
- 蔡金曼: 嫦娥四号着陆器与巡视器顺利分离 玉兔二号在月背留下人类探测器的第一道印迹. In: cnsa.gov.cn. 4. Januar 2019, abgerufen am 23. Dezember 2019 (chinesisch).
- 德先生: 孙泽洲:嫦娥四号传回月球近景图离不开他13年的付出,月背软着陆为中国实现载人登月打下契机. In: zhuanlan.zhihu.com. 8. Januar 2019, abgerufen am 5. Mai 2019 (chinesisch).
- “玉兔二号”:成月面工作时间最长月球车. In: clep.org.cn. 23. Dezember 2019, abgerufen am 23. Dezember 2019 (chinesisch).
- Robert Wimmer-Schweingruber: Chinesische Mondmission Chang'e 4. In: youtube.com. 26. Januar 2020, abgerufen am 30. August 2020.
- 月球背面拓荒者——嫦娥四号着陆月球背面一周年. In: clep.org.cn. 3. Januar 2020, abgerufen am 3. Januar 2020 (chinesisch).
- Andrew Jones: Why will it take China's Yutu 2 moon rover so long to reach lunar 'mystery hut'? In: space.com. 14. Dezember 2021, abgerufen am 15. Dezember 2021 (englisch).
- 韩绍金、李鑫、宋星光: 艰难爬坡!玉兔迎来月背最大坡度 『玉兔二号驾驶日记』(28). In: mp.weixin.qq.com. 3. Dezember 2021, abgerufen am 3. Dezember 2021 (chinesisch).
- Wang Junwei et al.: Computer Vision in the Teleoperation of the YUTU-2 Rover. In: adsabs.harvard.edu. 3. August 2020, abgerufen am 7. Dezember 2021 (englisch).
- “天问一号”:中国首次火星之旅. In: k.sina.com.cn. 10. Juli 2020, abgerufen am 11. Juli 2020 (chinesisch).
- Ding Liang et al.: A 2-year locomotive exploration and scientific investigation of the lunar farside by the Yutu-2 rover. In: science.org. 19. Januar 2022, abgerufen am 29. Januar 2022 (englisch).
- 刘锟: “玉兔二号”月球车顺利踏上月球背面!后续还将完成哪些使命? In: jfdaily.com. 4. Januar 2019, abgerufen am 7. Mai 2019 (chinesisch).
- 嫦娥四号着陆器和“玉兔二号”巡视器进入第七月夜. In: clep.org.cn. 9. Juli 2019, abgerufen am 13. Juli 2019 (chinesisch). An den Fahrspuren auf dem zweiten Foto ist der erratische Weg zu erkennen, den Jadehase 2 bis zum Ende des 7. Arbeitstags auf dem Mond zurückgelegt hat (der Rover selbst ist bereits aus dem Blickfeld der Landerkamera entschwunden).
- Li Chunlai, Su Yan et al.: The Moon’s farside shallow subsurface structure unveiled by Chang’E-4 Lunar Penetrating Radar. In: advances.sciencemag.org. 26. Februar 2020, abgerufen am 15. März 2020 (englisch).
- 叶瑞优: 国家天文台基于嫦娥四号探测数据发现月球背面幔源物质初步证据. In: cas.cn. 16. Mai 2019, abgerufen am 20. Mai 2019 (chinesisch). In dem Video ist ab 00:17 die Grundgeschwindigkeit des Rovers zu sehen.
- 嫦娥四号顺利唤醒,进入第27月昼工作期. In: spaceflightfans.cn. 7. Februar 2021, abgerufen am 7. Februar 2021 (chinesisch).
- 专家:希望玉兔二号至少工作一年. In: clep.org.cn. 1. April 2019, abgerufen am 10. Mai 2019 (chinesisch).
- 韩绍金 et al.: 穿越1000米来看你,大家关注的小房子来了 『玉兔二号驾驶日记』(29). In: mp.weixin.qq.com. 7. Januar 2022, abgerufen am 7. Januar 2022 (chinesisch).
- 韩绍金 et al.: 虎年春节惊魂记『玉兔二号驾驶日记』(30). In: mp.weixin.qq.com. 25. Februar 2022, abgerufen am 25. Februar 2022 (chinesisch).
- Chang’e 3, 4 (CE 3, 4) / Yutu. Abgerufen am 4. Januar 2019.
- 嫦娥四号探测数据助力科研人员在月球背面发现“天外来客”. In: nssdc.ac.cn. 2. Dezember 2021, abgerufen am 7. Dezember 2021 (chinesisch).
- 付瑞霞: 嫦娥四号全景相机可实现毫米量级的空间分辨率. In: news.sina.com.cn. 12. Januar 2019, abgerufen am 7. Dezember 2021 (chinesisch).
- The scientific objectives and payloads of Chang’E−4 mission. In: Planetary and Space Science. Band 162, 1. November 2018, ISSN 0032-0633, S. 207–215, doi:10.1016/j.pss.2018.02.011 (sciencedirect.com [abgerufen am 4. Januar 2019]).
- Li Chunlai et al.: Overview of the Chang’e-4 Mission: Opening the Frontier of Scientific Exploration of the Lunar Far Side. In: researchgate.net. 8. März 2021, abgerufen am 14. Dezember 2021 (englisch).
- 测月雷达:给月球做B超. In: news.sciencenet.cn. 11. Januar 2019, abgerufen am 8. Dezember 2021 (chinesisch).
- Su Yan, Fang Guangyou et al.: Data processing and initial results of Chang'e-3 lunar penetrating radar. In: iopscience.iop.org. 13. September 2014, abgerufen am 15. März 2020 (englisch).
- Fang Guangyou et al.: Lunar Penetrating Radar onboard the Chang'e-3 mission. In: iopscience.iop.org. 29. September 2014, abgerufen am 15. März 2020 (englisch).
- 嫦娥四号成功实现人类探测器首次月球背面软着陆 上海技物所3台载荷均工作正常. In: sitp.ac.cn. 7. Januar 2019, abgerufen am 8. Dezember 2021 (chinesisch).
- Bruce Murray: VNIS payload and observation footprint. In: planetary.org. Abgerufen am 15. Dezember 2021 (englisch).
- Andrew Jones: Sweden joins China's historic mission to land on the far side of the Moon in 2018. In: findchina.info. 16. Mai 2016, abgerufen am 8. Dezember 2021 (englisch).
- 嫦娥四号中性原子探测仪最新进展. In: cnsa.gov.cn. 20. Januar 2022, abgerufen am 22. Januar 2022 (chinesisch).
- Christoph Seidler: Chinesen entdecken würfelförmiges Objekt auf dem Mond. 6. Dezember 2021, abgerufen am 6. Dezember 2021.
- 乔楠楠: “我们的太空”新媒体中心正式启用. In: mod.gov.cn. 2. August 2019, abgerufen am 7. Januar 2022 (chinesisch).
- “我们的太空”知乎关注破百万 周源受聘“航天文化大使”. In: tech.sina.cn. 14. Juli 2020, abgerufen am 7. Januar 2022 (chinesisch).
| Jadehase 2 (Alternativbezeichnungen des Lemmas) |
|---|
| Jadehase 2; 玉兔二号, yùtù èr hào, Jade Rabbit 2, Yutu-2, Yutu 2, 玉兔二号月球车; Chang'e-4-Rover; Jade-Kaninchen 2 |