Sun Zezhou
Sun Zezhou (chinesisch 孫澤洲 / 孙泽洲, Pinyin Sūn Zézhōu), * 1970 in Shenyang, Provinz Liaoning, ist ein chinesischer Elektroingenieur. Er ist seit April 2016 Chefkonstrukteur der chinesischen Mond- und Marssonden.
Studium
Sun Zezhous Eltern arbeiteten beide bei der Shenyang Aircraft Corporation, wo primär Jagdflugzeuge hergestellt werden. Von daher war er schon früh an Technik interessiert und schrieb sich 1988 nach dem Abitur an der damaligen Fakultät für Elektrotechnik (电子工程系) der Luftfahrtakademie Nanjing ein. Zu Beginn seines Studiums hatte er Schwierigkeiten, sich in das plötzlich in Eigenverantwortung zu organisierende Lernen hineinzufinden;[1] insbesondere bei der Infinitesimalrechnung und der Theorie der elektromagnetischen Felder konnte er keinen praktischen Nutzen erkennen. Die Prüfungsergebnisse waren entsprechend schlecht, wofür er in den Frühlingsfest-Ferien nach dem ersten Semester von seinem Vater ernsthaft kritisiert wurde. Freunde seiner Eltern erklärten ihm dann, welchen Nutzen die scheinbar sinnlosen Theorie-Fächer im Laufe des weiteren Studiums haben würden und gaben ihm Ratschläge, wie er sich den Stoff erschließen sollte. Sun Zezhou fasste Tritt, und ein Jahr später erhielt er ein Stipendium für gute Leistungen. Er konnte das Niveau aufrechterhalten, erhielt jährlich Stipendien und schloss sein Studium 1992 als Elektroingenieur ab.[2]
Nicht zuletzt aufgrund seiner Leistungen war Sun Zezhou bald zum stellvertretenden Sekretär der Fakultätszelle des Kommunistischen Jugendverbands aufgestiegen, wo seine Aufgabe die Organisation von Gruppenaktivitäten der Studenten war. Hierbei sammelte er Erfahrung bei der Führung und Motivierung von Menschen, die ihm im weiteren Verlauf sehr von Nutzen sein würde.[3]
Erdbeobachtungssatelliten
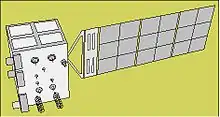
Gleich nach seinem Studienabschluss, noch 1992, kam Sun Zezhou zur Chinesischen Akademie für Weltraumtechnologie, eine Tochterfirma der China Aerospace Science and Technology Corporation. Nach einem am 6. Juli 1988 anlässlich des Staatsbesuchs von Präsident José Sarney unterzeichneten Übereinkommen zwischen China und Brasilien über die gemeinsame Entwicklung von Erdbeobachtungssatelliten hatten die Außenminister beider Länder am 22. August 1988 einen vom Nationalen Institut für Weltraumforschung Brasiliens und der Chinesischen Akademie für Weltraumtechnologie ausgehandelten Kooperationsvertrag über Entwicklung und Bau von zwei modernen Fernaufklärungssatelliten unterzeichnet, das sogenannte „China-Brazil Earth Resources Satellite Program“. 30 % der Gesamtkosten von 300 Millionen US-Dollar sollten von Brasilien getragen werden, 70 % von China, und die Entwicklungsaufgaben sollten ähnlich verteilt sein.[4] Sun Zezhou war bereits an der Entwicklung des ersten Satelliten beteiligt, in Brasilien CBERS-1, in China Ziyuan 1-01 (资源一号01星) genannt. Die Akademie für Weltraumtechnologie entwickelte für die in einem sonnensynchronen Orbit fliegenden Satelliten des Kooperationsprojekts einen eigenen Bus, im Ausland „Phoenix Eye“ in China „Fengyan Pingtai“ (凤眼平台) genannt.[5] Nach einigen Verzögerungen fand der Start des ersten Satelliten schließlich am 14. Oktober 1999 statt.[6]
Bei der Entwicklung der Phönixauge-Plattform gab es fünf Arbeitsbereiche: Gehäuse, Lageregelung und Orbit, Temperatursteuerung, Stromversorgung und Telemetrie sowie Bahnverfolgung und Fernsteuerung, dazu kamen dann noch die Nutzlasten des jeweiligen Satelliten (Kameras, Datenspeicher, Weltraumwetter-Beobachtung).[7][8] Nach dem erfolgreichen Start des ersten Satelliten wurde Sun Zezhou Ende 1999 zum stellvertretenden Chefingenieur für das baugleiche Nachfolgemodell CBERS-2 bzw. Ziyuan 1-02 ernannt,[9] er war verantwortlich für den Arbeitsbereich Bahnverfolgung und Fernsteuerung sowie für die Integration der Nutzlasten. In letzterer Eigenschaft musste er auch nach Brasilien reisen, um an den Tests der dort entwickelten Weitwinkel-Kamera teilzunehmen. Nach dem Start des Satelliten vom Kosmodrom Taiyuan am 21. Oktober 2003 war er auch für die Flugbahnsteuerung verantwortlich.[10]
Weltraumbasiertes Sonnenteleskop
Mitte der 1990er Jahre schlug das Sonnenobservatorium Huairou (seit April 2001 ein Teil der Nationalen Astronomischen Observatorien der Chinesischen Akademie der Wissenschaften) erstmals vor, zur Messung des Magnetfelds auf der Sonnenoberfläche ein optisches Teleskop mit einem 1-m-Spiegel, einem hochpräzisen Polarisator und einem zweidimensionalen Echtzeit-Spektrografen[11] für den Wellenlängenbereich von 4000 – 6000 Å in einer Erdumlaufbahn zu platzieren. Dieses in China unter der Bezeichnung 空间太阳望远镜 (Pinyin Kōngjiān Tàiyáng Wàngyuǎnjìng), im Ausland als Space Solar Telescope bzw. SST bekannte Projekt wird, da es neben der Grundlagenforschung auch der Weltraumwetter-Vorhersage dient, von der Nationalen Raumfahrtbehörde unterstützt.[12] 2003 wurde Sun Zezhou bei der für die Vorarbeiten zuständigen Expertengruppe zum stellvertretenden Chefplaner für die technischen Aspekte des Projekts (背景型号副总设计师) ernannt.[13]
Mondsonden
Während Sun Zezhou bei der Entwicklung der Erdbeobachtungssatelliten vom Typ Ziyuan 1 eng mit dem brasilianischen Institut für Weltraumforschung zusammenarbeitete, entwickelte Ye Peijian parallel dazu auf der Basis einer erweiterten Phönixauge-Plattform mit zwei Solarmodulen den rein chinesischen Aufklärungssatelliten Ziyuan 2, der in Echtzeit Messdaten an die Bodenstation übermitteln konnte.[14] Der erste Satellit dieser Serie (资源二号01星) startete am 1. September 2000, der zweite am 27. Oktober 2002[15][16] und der dritte am 6. November 2004.[17][18] Nachdem die Chinesische Akademie für Weltraumtechnologie 2001 unter der Leitung von Ye Peijian eine firmeninterne Machbarkeitsstudie für einen Orbiter zur Erkundung der Mondoberfläche in die Wege geleitet hatte,[19] wurde Sun Zezhou 2002 aufgrund seiner Erfahrung bei den Ziyuan-Satelliten, die in der Erdumlaufbahn ähnliche Aufgaben erfüllten, in die Expertengruppe berufen. Dort war er wieder für die an Bord der Sonde befindlichen Systeme für Bahnverfolgung und Fernsteuerung zuständig, als sich die Pläne dann konkretisierten, für die präzise Definition der Aufgaben und Ziele dieser Systeme sowie den Entwurf der Schnittstellen zwischen seinen Systemen und dem Rest der Sonde. 2003 stand das Konzept und die Firma beschloss, die Sonde zu bauen.
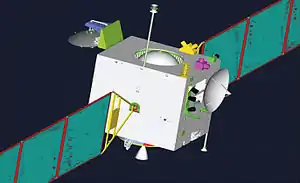
Als 2004 die Entwicklergruppe für die nun „Chang’e 1“ genannte Mondsonde zusammengestellt wurde, wurde Sun Zezhou zum stellvertretenden Chefkonstrukteur ernannt.[20] Nun musste er sich auch in ihm bislang fremde Gebiete wie Temperaturregelung oder Stromversorgung der Sonde einarbeiten und das Problem lösen, wie man alle Systeme und Nutzlasten in einem Raumflugkörper unterbringen konnte, der ohne Treibstoff nur 1150 kg wiegen durfte. Am Ende nahmen die Ingenieure den bewährten DFH-3-Bus der Akademie für Weltraumtechnologie, versahen ihn für Tiefraumzwecke mit einer rundum schwenkbaren Antenne etc. und bauten dort von den Ziyuan-Satelliten übernommene Instrumente ein. Im Dezember 2004 war der erste Prototyp des Mondorbiters fertig und wurde nun zahllosen Tests unterzogen. Mehr als 100 Komponenten und 23 Computerprogramme mussten geprüft werden, wobei sich vor allem mit der Software und den Schnittstellen immer wieder Probleme ergaben. Trotz Überstunden – Sun Zezhou war regelmäßig bis 9 Uhr abends, oft bis Mitternacht in der Firma – dauerte es bis September 2005 bis der Prototyp zuverlässig funktionierte. Nachdem Ende 2005 der Bau der tatsächlichen Sonde genehmigt worden war,[21] war Sun Zezhous Hauptaufgabe die Qualitätskontrolle der – inklusive Gehäuse und Antrieb – mittlerweile 168 Komponenten. Hierzu führte er für jeden Arbeitsbereich die in China damals noch neue Fehlermöglichkeits- und -einflussanalyse ein. Dies bewährte sich. Nach dem Start am 24. Oktober 2007 arbeitete die Sonde fast anderthalb Jahre einwandfrei und erfüllte alle ihre Aufgaben, bis sie am 1. März 2009 gezielt zum Absturz gebracht wurde.
Der am 1. Oktober 2010 gestartete Mondorbiter Chang’e 2 besaß zwar eine verbesserte Kamera, war aber ansonsten mehr oder weniger baugleich mit Chang’e 1. Bereits 2008 hatte man bei der Chinesischen Akademie für Weltraumtechnologie mit der Arbeit am nächsten Schritt des Mondprogramms begonnen, Sun Zezhou war im Alter von 38 Jahren zum Chefkonstrukteur für alle Systeme der Mondlandesonde Chang’e 3 und ihres Rovers Jadehase ernannt worden, beides weitgehende Neuentwicklungen. Chang’e 3 hatte ein anspruchsvolleres Antriebssystem als die Orbiter, die Sonde musste sich selbst einen geeigneten Ort zur Landung suchen, die Stoßdämpfer in den Landebeinen mussten konstruiert werden. Da die Sonde auf der Mondoberfläche jeweils zwei Wochen extremer Sonneneinstrahlung und extremer Kälte ausgesetzt war, war die Temperaturregelung wesentlich schwieriger zu handhaben als bei einem Orbiter. Außerdem musste für den Rover eine möglichst staubarme Fortbewegungsweise gefunden sowie autonome Navigation und Hindernisvermeidung entwickelt werden. Zum Vergleich: bei Chang’e 1 waren etwa 30 % der Sonde neu entwickelt, bei Chang’e 3 waren es 80 %. Allein für den zwölf Minuten dauernden Landeprozess führten Sun Zezhou und seine Mitarbeiter 10.000 Computersimulationen und rund 1000 Versuche mit Modellen durch. Am 1. Dezember 2013 startete Chang’e 3 vom Kosmodrom Xichang, am 14. Dezember erfolgte die weiche Landung im Mare Imbrium, und wenn auch das Fortbewegungssystem des Rovers im Februar 2014 ausfiel, am 3. August 2016 dann auch die Kameras etc., arbeiten die Nutzlasten auf dem Lander der Sonde bis heute (Dezember 2019) einwandfrei.[22]
Als im April 2016 die Akademie für Weltraumtechnologie offiziell mit der Entwicklung von Chang’e 4 und der heute unter dem Namen Tianwen-1 bekannten Marssonde begann, wurde Sun Zezhou als Nachfolger von Ye Peijian zum Chefkonstrukteur für beide Projekte ernannt. Während Chang’e 3 auf der Vorderseite des Mondes gelandet war, sollte mit Chang’e 4 eine Landung auf der Mondrückseite versucht werden, was die Entwicklung eines Relaissatelliten, später „Elsternbrücke“ genannt, notwendig machte, der in einem Halo-Orbit um den Lagrange-Punkt L2 stationiert werden sollte. Auch die Landung der Sonde war deutlich anspruchsvoller als bei Chang’e 3: die Sonde hatte in dem Zielgebiet auf der zerklüfteten Mondrückseite im Vergleich zu Chang’e 3 nur 1/8 der Fläche als Landeplatz zur Verfügung und musste fast senkrecht in den Von-Kármán-Krater hineinfliegen. Der Relaissatellit startete am 20. Mai 2018, die Sonde folgte am 7. Dezember 2018, und am 3. Januar 2019 erfolgte die weiche Landung auf dem Mond. Die Sonde und der Rover Jadehase 2 arbeiten bis heute einwandfrei (Stand 27. Juli 2020).[23] Am 11. Juni 2020 wurde Sun Zezhou von der International Astronautical Federation zusammen mit Wu Weiren, dem Technischen Direktor des Mondprogramms, und dessen Stellvertreter Yu Dengyun für die weltweit erste Landung auf der Rückseite des Mondes der World Space Award verliehen.[24][25]
Marssonde
Bei der Marsmission Tianwen-1 lag der Schwierigkeitsgrad noch einmal höher. Sun Zezhou und seine Gruppe – dieselben Leute, die schon seit Chang’e 3 zusammenarbeiten – konnten von den Mondsonden zwar das autonome Landesystem übernehmen. Bevor das Triebwerk jedoch zündete, bremste die Sonde nach dem Eintritt in die Marsatmosphäre zunächst für 5 Minuten nur mit ihrem Strömungswiderstand und dynamischem Auftrieb von 4,8 km/s (also 17.280 km/h) auf 460 m/s ab, dann 90 Sekunden lang mit einem Fallschirm auf 95 m/s. Anders ausgedrückt, 98 % der Geschwindigkeit wurden über die Atmosphäre abgebremst. Da die Marsatmosphäre erstens dünner ist als die Erdatmosphäre, zweitens eine andere chemische Zusammensetzung besitzt und sich außerdem auf dem Mars immer mit böigen Winden zu rechnen ist, war dies der schwierigste Teil der Mission. Es gab nur einen Versuch, und die Entwickler verwendeten sehr viel Zeit und Sorgfalt auf die Konstruktion des Hitzeschildes und des Fallschirm-Mechanismus.[26] Zur Einordnung: von den 42 Mars-Missionen, die diverse Staaten seit den 1960er Jahren durchführten, waren nur 52 % erfolgreich.[27]
Es wurden zunächst Windkanäle umgebaut, um den Einfluss des CO2-Gehalts der Luft auf Aerodynamik und Materialerhitzung zu testen. Die auf diese Art ermittelten Daten bildeten die Grundlage, um eine im Vergleich zu den für Landungen auf der Erde optimierten Raumflugkörpern der Akademie für Weltraumtechnologie völlig neue Form des Hitzeschildes zu konstruieren, der unter strömungsmechanischen Aspekten mehr einem Nurflügelflugzeug als einer Landekapsel ähnelte. Um den Einfluss von Unwägbarkeiten in der Marsatmosphäre zu reduzieren, entschied man sich dafür, zunächst auf einer ballistischen Flugbahn in die Atmosphäre einzudringen, bei der die Bremsung nur durch den Strömungswiderstand stattfindet. Bei Mach 3 wurde dann jedoch ein Trimmflügel ausgefahren, der die Eintrittskapsel in einem bestimmten Winkel ausrichtete, sodass auf sie nicht nur Strömungswiderstand, sondern auch dynamischer Auftrieb einwirkte, wie bei einem Raumgleiter. Vor dem Auslösen des Fallschirms musste die Kapsel dann erneut gekippt werden, damit der Luftstrom am Heck den Fallschirm optimal entfaltete.[26]
Der Überschallfallschirm wurde 2018 auf dem Abfangraketen-Testgelände Korla mit Höhenforschungsraketen vom Typ Tianying 6 immer wieder in Höhen von 30–54 km geschossen, wo die irdische Atmosphäre so dünn ist wie auf dem Mars in 4 km Höhe.[28][29] Außerdem erprobten Sun Zezhou und seine Leute in der Wüste Xinjiangs einen Monat lang, teilweise während Sandstürmen, einen Prototyp des Rovers. Da auf dem Mars, anders als auf dem Mond, eine relativ große Gefahr besteht, dass eines oder mehrere Räder im Sand einsinken, wurde hier – weltweit erstmals bei einem auf einem fremden Himmelskörper eingesetzten Fahrzeug – eine aktive Radaufhängung gewählt, die es dem Rover ermöglicht, festgefahrene Räder aus dem Sand zu ziehen und – sich wie eine Spannerraupe bewegend – auch steilere Hänge zu erklimmen.[26]
Das autonome Hindernisvermeidungssystem des Landers wurde anschließend mehr als zwei Monate auf dem Mehrzweck-Versuchsgelände für Landungen auf fremden Himmelskörpern des Forschungsinstituts für weltraumbezogenen Maschinenbau und Elektrotechnik in Huailai getestet, wo man mit künstlichen Felsbrocken die Marsoberfläche nachbaute. Außerdem wurde der Lander über den Steppen der Inneren Mongolei immer wieder aus Flugzeugen abgeworfen, wie einst in den 1960er Jahren bei der Entwicklung der ersten Rückkehr-Satelliten.[30] Um das Bodenradar des Rovers zu testen, begaben sich die Entwickler auf den Laohugou-Gletscher (老虎沟1冰川), auch bekannt als Touming-Mengke-Gletscher, im Kreis Subei am Nordhang des Qilian Shan in Gansu. Da das Eis des Gletschers eine ähnliche Permittivität wie der Regolith des Mars besaß, war dies ein idealer Ort. Die Höhe von 4400 m und teilweise schwerer Schneefall stellten jedoch eine erhebliche Belastung für die Entwickler dar.[31]
Sonstige Projekte
Als leitender Ingenieur ist Sun Zezhou auch an der Konstruktion der Sonden für die Asteroidenmission 2024 und die Erkundung des äußeren Sonnensystems beteiligt. Abhängig vom konkreten Startdatum (um 2030) ergeben sich für letzteres Projekt verschiedene Missionsprofile. Bei einer Festveranstaltung am 22. Februar 2022 erwähnte Sun Zezhou neben dem Jupiter und der Heliopause auch den Saturn.[32]
Weblinks
Einzelnachweise
- Die Studentenproteste, die sich im Dezember 1986 von Hefei über Nanjing, Shanghai und Peking auf das ganze Land ausgebreitet hatten, hatten bereits im Januar 1987 ein Ende gefunden. Stephen Uhalley Jr.: A History of the Chinese Communist Party. Hoover Institution Press, Stanford 1988, S. 227f und Joachim Glaubitz: China unter wachsendem innenpolitischem Druck. In: Wolfgang Wagner et al. (Hrsg.): Die Internationale Politik 1987–1988. R. Oldenbourg Verlag, München 1991, S. 323.
- Man vergleiche hierzu die völlig entgegengesetzten Erfahrungen von Zhang Bainan, heute Chefkonstrukteur der bemannten Raumschiffe Chinas, an der Universität für Wissenschaft und Technik der Landesverteidigung.
- 钱钰: “嫦娥”总师孙泽洲受聘母校南航大. In: news.carnoc.com. 6. März 2014, abgerufen am 8. Dezember 2019 (chinesisch).
- Story. In: cbers.inpe.br. 5. Februar 2018, abgerufen am 9. Dezember 2019 (englisch).
- Phoenix Eye in der Encyclopedia Astronautica, abgerufen am 9. Dezember 2019 (englisch).
- Gunter Dirk Krebs: CBERS 1, 2, 2B / ZY-1 01, 02, 02B. In: space.skyrocket.de. Abgerufen am 9. Dezember 2019 (englisch).
- 凤眼平台. In: cast.cn. 31. Juli 2015, abgerufen am 9. Dezember 2019 (chinesisch).
- ZY in der Encyclopedia Astronautica, abgerufen am 9. Dezember 2019 (englisch).
- 钱钰: “嫦娥”总师孙泽洲受聘母校南航大. In: news.carnoc.com. 6. März 2014, abgerufen am 8. Dezember 2019 (chinesisch).
- 孙泽洲. In: ceie.nuaa.edu.cn. 20. September 2017, abgerufen am 6. Mai 2019 (chinesisch).
- China Exclusive: Scientists looking for site for giant solar telescope. In: spacedaily.com. 29. August 2012, abgerufen am 9. Dezember 2019 (englisch).
- 孙家栋 et al.: “十一五”空间科学发展规划. 国防科工委, 北京 2007.
- 孙泽洲. In: ceie.nuaa.edu.cn. 20. September 2017, abgerufen am 6. Mai 2019 (chinesisch).
- 叶培建: 科学院院士叶培建. In: cast.cn. 3. August 2015, abgerufen am 9. Dezember 2019 (chinesisch).
- 资源二号卫星ZY-2. In: cast.cn. 3. August 2015, abgerufen am 9. Dezember 2019 (chinesisch).
- 2002年10月27日 “中国资源二号”卫星成功发射. In: people.com.cn. 1. August 2003, abgerufen am 9. Dezember 2019 (chinesisch).
- 凤眼平台. In: cast.cn. 31. Juli 2015, abgerufen am 9. Dezember 2019 (chinesisch).
- Gunter Dirk Krebs: ZY-2 01, 02, 03 (JB-3 1, 2, 3). In: space.skyrocket.de. Abgerufen am 9. Dezember 2019 (englisch).
- 孙泽洲从“探月”到“探火” 一步一个脚印. In: cast.cn. 26. Oktober 2016, abgerufen am 12. Dezember 2019 (chinesisch).
- 徐超、黄治茂: “嫦娥一号” 副总设计师孙泽洲. In: news.163.com. 8. November 2007, abgerufen am 6. Mai 2019 (chinesisch).
- 德先生: 孙泽洲:嫦娥四号传回月球近景图离不开他13年的付出,月背软着陆为中国实现载人登月打下契机. In: zhuanlan.zhihu.com. 8. Januar 2019, abgerufen am 11. Dezember 2019 (chinesisch).
- Lunar-based Ultraviolet Telescope (LUT). In: nao.cas.cn. Abgerufen am 12. Dezember 2019 (englisch).
- “嫦娥”“玉兔”再入梦乡,“天问一号”正在征途. In: spaceflightfans.cn. 27. Juli 2020, abgerufen am 27. Juli 2020 (chinesisch).
- 嫦娥四号任务团队优秀代表首获国际宇航联合会世界航天最高奖. In: tech.sina.com.cn. 11. Juni 2020, abgerufen am 10. August 2020 (chinesisch).
- 2020 IAF Award Recipients. In: iafastro.org. Abgerufen am 10. August 2020 (englisch).
- 李学磊: 国家航天局举办新闻发布会 介绍我国首次火星探测任务情况. In: gov.cn. 12. Juni 2021, abgerufen am 14. Juni 2021 (chinesisch).
- 孙泽洲从“探月”到“探火” 一步一个脚印. In: cast.cn. 26. Oktober 2016, abgerufen am 12. Dezember 2019 (chinesisch).
- 中国探空火箭成功实验火星探测器降落伞技术. In: guancha.cn. 5. September 2018, abgerufen am 20. Mai 2021 (chinesisch).
- HOW ON EARTH did China succeed in landing Zhurong rover on Mars? Review of CNSA deep space missions (ab 0:14:10) auf YouTube, 13. Juni 2021, abgerufen am 17. Juni 2021.
- “祝融号”火星车即将驶出 即将实施两器互拍. In: beijingtoday.com.cn. 17. Mai 2021, abgerufen am 20. Mai 2021 (chinesisch).
- Ling Xin: Tracking China’s rapid rise in lunar exploration. In: physicsworld.com. 1. September 2021, abgerufen am 20. September 2021 (englisch).
- China Aerospace Science and Technology Corporation: 中国航天人下一步将去向何方?孙泽洲:我们的目标不止一个. In: m.weibo.cn. 22. Februar 2022, abgerufen am 22. Februar 2022 (chinesisch).