Mars Exploration Rover
Die Mars Exploration Rover Mission 2003 (MER) war eine Raumfahrtmission der NASA, die im Jahr 2003 mit dem Start von zwei Trägerraketen zum Transport zweier Rover – Spirit und Opportunity – begann, um die Oberfläche und Geologie des Mars zu erforschen. Die Mission war Teil des Mars-Exploration-Programms der NASA, welches bereits drei erfolgreiche Raumsonden beinhaltet: Die zwei Viking-Lander von 1976 und Pathfinder von 1997.

Ziel der Mission war es, zwei automatische Geländewagen (englisch rover) unabhängig voneinander auf dem Mars abzusetzen, die geologischen Bedingungen dort zu erforschen und nach Hinweisen von Wasser zu suchen, dessen Vorhandensein als Grundvoraussetzung für Leben auf dem Mars gilt. Jeder Rover selbst war solarbetrieben und mit Instrumenten ausgerüstet, um die Marsoberfläche zu fotografieren und Steine zu analysieren. Aufgrund der Entfernung zur Erde war keine direkte Steuerung der Rover möglich, deshalb war die Software-Steuerung der Fahrzeuge intelligent genug, automatisch Ziele anzufahren und Hindernissen auszuweichen. Obwohl die Mission jeweils nur auf 90 Sols (Marstage) ausgelegt war, funktionierte Opportunity bis zum 12. Juni 2018 (5111 Sols). Spirits Mission wurde am 25. Mai 2011 für beendet erklärt, nachdem der Rover im März 2010 in einen Winterschlafmodus gefallen war. Es war zum ersten Mal der Nachweis direkt vor Ort gelungen, dass auch auf anderen Planeten flüssige Wasservorkommen existiert haben und es wurden zum ersten Mal Sedimentgesteine eines fremden Planeten untersucht. Erstmals wurde das Datenmaterial aus der Erkundung eines fremden Himmelskörpers über das Internet annähernd in Echtzeit öffentlich zugänglich gemacht, noch bevor die Projektbeteiligten es selbst auswerten konnten.
Die Mission wurde für die NASA vom Jet Propulsion Laboratory unterhalten, welches die Rover geplant und gebaut und betrieben hatte. Auch waren deutsche Forscher mit zwei Instrumenten an Bord vertreten: ein Mößbauer-Spektrometer von der Johannes Gutenberg-Universität Mainz und ein Alphapartikel-Röntgenspektrometer des Max-Planck-Instituts für Chemie in Mainz.
Vorgeschichte
Die ersten Ideen zu dieser Marsmission waren innerhalb einer Wissenschaftlergruppe Anfang der 1990er Jahre um Steve Squyres entstanden.[1][2] Ein Mars-Lander sollte geologische Informationen über den Mars mithilfe eines Instrumentenpaketes sammeln. Ein Paket bestand dabei aus einer Stereokamera, mehreren Spektrometer und einem Mikroskop. Mit dieser Nutzlast (genannt „Athena“ nach der griechischen Schutzgöttin der Wissenschaften) sollte der Lander ähnliche Aufgaben erledigen können wie ein Geologe auf der Erde. Eine erste Mission sollte bereits 1995 starten, wurde jedoch von der NASA abgelehnt.
Durch das NASA-Programm „besser, schneller, billiger“ sollte die wissenschaftliche Nutzlast dann stark eingeschränkt auf einem Rover zum Mars gebracht werden. Nachdem jedoch die Mars-Sonden Mars Climate Orbiter und Mars Polar Lander den Planet nicht erreichten, wurde die Entwicklung für diese Mission ebenfalls wieder gestoppt. Durch die vorhergegangenen Verluste von zwei Sonden stand nun die NASA unter starkem Erfolgsdruck. Erst nach einer Restrukturierung der NASA wurde die Mission im Jahr 2000 wieder in Gang gebracht, vor allem, um den einzigartigen Starttermin 2003 nicht zu versäumen: In diesem Jahr kamen sich Mars und Erde so nahe wie seit 60.000 Jahren nicht mehr. Deshalb konnte eine Marsrakete mit weniger Energie den Mars erreichen, oder es konnte mit gleicher Energie mehr Nutzlast transportiert werden. Zudem bestimmte der damalige NASA-Chef Daniel Goldin, dass gleich zwei Marsrover geschickt werden sollten. Durch diese Redundanz wurde das Risiko halbiert und die mögliche wissenschaftliche Ausbeute verdoppelt. Dies bedeutete jedoch auch die doppelte Arbeit, die beiden Rover innerhalb von drei Jahren auf die Reise zum Mars zu schicken.
Ziele
Die NASA definierte folgende sieben wissenschaftlichen Ziele, die sie mit den Mars Exploration Rovern zu erreichen hoffte:[3]
- Suchen nach Steinen und Böden, die Hinweise auf frühere Aktivität von Wasser enthalten. Insbesondere werden Proben gesucht, die Mineralien enthalten, die durch von Wasser beeinflussten Prozesse wie Niederschläge, Verdampfung, Sedimentation oder hydrothermale Prozesse entstanden sind.
- Bestimmung der Verteilung und der Zusammensetzung von Mineralien, Gesteinen und Böden rund um die Landestelle.
- Bestimmung der geologischen Prozesse, die die umgebende Landschaft geformt und deren Chemie geprägt haben. Solche Prozesse könnten Wasser- oder Winderosion, Sedimentation, hydrothermale Mechanismen, Vulkanismus oder Kraterbildung sein.
- Durchführung von Kalibrierung und Validierung von Oberflächenbeobachtungen, die mit Instrumenten von Sonden im Marsorbit gemacht wurden. Dadurch kann die Genauigkeit und Wirksamkeit der Fernbeobachtungsinstrumente aus dem Marsorbit bestimmt werden.
- Suche nach eisenhaltigen Mineralien, Identifizieren und Quantifizieren der relativen Anteile von Mineralientypen, die Wasser enthalten oder in Wasser geformt wurden, wie beispielsweise eisenhaltige Karbonate.
- Charakterisierung der Mineralogie und Oberflächenbeschaffenheit von Steinen und Böden und Bestimmung der Prozesse, die sie geprägt haben.
- Suche nach geologischen Hinweisen auf die Umgebungsbedingungen, die existierten, als flüssiges Wasser vorhanden war. Beurteilen, ob diese Umgebung dazu beitragen könnte, Leben hervorzubringen.
Auswahl des Landeorts
Während des Baus der Rover stellten Wissenschaftler und Ingenieure innerhalb von zwei Jahren eine Liste von 155 Kandidaten für Landeplätze zusammen, wobei sie die Aufnahmen von Mars Global Surveyor und Mars Odyssey Orbiter verwendeten. Gemäß der NASA-Strategie „follow the water“ wurden Orte ausgesucht, die Hinweise auf ehemaligen Einfluss von Wasser zeigen.[4][5] Neben den wissenschaftlichen Zielen mussten auch technische Randbedingungen eingehalten werden, um eine sichere Landung zu garantieren. So musste der Landeplatz wegen der Solarzellen in der Nähe des Marsäquators liegen. Damit der Fallschirm bei der Landung optimal funktioniert, musste der Landeplatz wegen des Atmosphärendrucks mindestens 1,3 km tiefer als das normale Marsniveau liegen. Zudem durften keine starken Winde vorherrschen und die Gegend durfte nicht zu steinig sein oder zu starke Höhenunterschiede aufweisen.
Als Landeort für Spirit wählte die NASA den Krater Gusev. Dieser hat einen Durchmesser von 166 km und zeigt Spuren eines ehemaligen Sees. Ein breites und nun trockenes Tal namens Ma'adim Vallis führt über 900 km zum Krater hin und scheint durch fließendes Wasser geformt worden zu sein. Das Wasser schnitt sich damals in den Kraterrand ein und füllte den Krater zu einem großen Teil. Auf dem Boden des Gusev-Kraters könnten deshalb Sedimente zu finden sein, welche diese damaligen Bedingungen konserviert haben. Ein Problem bei diesem Gebiet waren starke Winde, die die Landung beeinträchtigen könnten. Die NASA ging das erhöhte Risiko jedoch ein, da sie die zu erwartende wissenschaftliche Ausbeute hier sehr hoch einschätzte.
Opportunity sollte in der Meridiani-Planum-Ebene landen, die sich auf der entgegengesetzten Seite des Mars befindet. Durch die Orbiter waren Hinweise gefunden worden, dass hier in der Vergangenheit einmal Wasser existiert hat. Ein Instrument des Mars Global Surveyors hatte hier graues Hämatit gefunden, welches sich meist in der Anwesenheit von flüssigem Wasser bildet.
Start und Flug
Trägerrakete

Die Trägerrakete für die beiden Raumsonden war eine dreistufige Delta II vom Typ 7925 mit einer Gesamthöhe von 39,6 Metern. Die erste Stufe wurde mit Flüssigtreibstoff betrieben. Durch diese Stufe wurde ein Schub von 890.000 Newton erzeugt, verstärkt durch 440.000 Newton (Spirit) oder 550.000 Newton (Opportunity) zusätzlichen Schub von neun Feststoffraketen. Die zweite Stufe benutzte ebenfalls Flüssigtreibstoff, war wiederzündbar und lieferte einen Schub von 44.000 Newton. Die dritte Stufe besaß einen Feststoffantrieb, welcher einen letzten Schub von 66.000 Newton für den Weg zum Mars lieferte.
Start
Spirit wurde am 10. Juni 2003, 17:59 UTC vom Launch Complex 17A der Cape Canaveral Air Force Station mit einer Delta-II-7925 gestartet, Opportunity hob am 7. Juli 2003, 15:18 UTC vom Launch Complex 17B mit einer etwas stärkeren Rakete vom Typ Delta-II-7925H ab.[5]
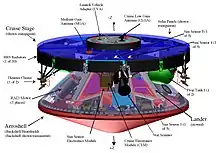
Konfiguration
Die Flugstufe war die Komponente, die für die Reise von der Erde zum Mars verwendet wurde. Sie hatte einen Durchmesser von 2,65 Meter und war 1,60 Meter hoch.[5] Die Hauptstruktur bestand aus Aluminium mit einem äußeren Ring von Rippen, die von Solarzellen bedeckt waren. Diese waren in fünf Sektionen unterteilt und lieferten zwischen 600 W (in Erdnähe) bis 300 W (in Marsnähe).[6] Die interne Elektronik wurde durch Heizungen und eine Mehrfachisolierung warm gehalten. Ein Kühlsystem mit Freon führte die Abwärme des Flugrechners und der Kommunikationselektronik innerhalb des Rovers nach außen, so dass diese nicht überhitzen. Während des Flugs wurde das Raumfahrzeug mit zwei Umdrehungen pro Minute stabilisiert. Die Zeit des Fluges wurde dazu benutzt, die Ausstattung und Software zu testen und auf die Ankunft auf dem Mars vorzubereiten.
Navigation
Ein Sternscanner und ein Sonnensensor erlaubten es dem Raumfahrzeug, seine Orientierung im Raum durch die Ermittlung der Positionen der Sonne und anderer Sterne zu bestimmen. Während des Flugs konnte das Raumfahrzeug geringfügig vom Kurs abkommen. Deshalb wurden sechs Kurskorrekturen eingeplant, bei denen dann auch gleich die Systeme kontrolliert wurden. Zur Kurskorrektur besaß es zwei Hydrazin-Tanks mit 31 kg Treibstoff. Mithilfe der Navigations- und Kontrollsysteme konnte damit das Raumfahrzeug auf Kurs gehalten werden. Zur Flugverfolgung wurden zwei traditionelle Ortungsverfahren mit einer neueren Triangulationsmethode kombiniert, um die Navigationspräzision zu verbessern.[5] Eine der traditionellen Methoden war das Ranging, welches die Entfernung zum Raumfahrzeug durch die genaue Messung der Signallaufzeit bestimmt. Die Messung der Doppler-Verschiebung des Radiosignals zur Geschwindigkeitsmessung wurde als zweite Methode angewandt. Das neue Delta-DOR-Verfahren (Delta – Differential One-Way Range) fügte Information über den Ort des Raumfahrzeugs senkrecht zur Sichtlinie hinzu. Zwei Antennenpaare des Deep Space Networks auf zwei unterschiedlichen Kontinenten empfingen gleichzeitig Signale von der Sonde. Danach wurden die gleichen Antennen benutzt, um natürliche Quellen von Radiowellen zu beobachten, deren Himmelsposition bekannt ist, wie zum Beispiel Quasare. Durch Verwendung dieser Methode konnte der gewünschte Landeort genauer als bisher möglich angepeilt werden.
Kommunikation
Das Raumfahrzeug benutzte während des Fluges das hochfrequente X-Band, um zu kommunizieren. Die Navigatoren sendeten Kommandos durch zwei Antennen auf der Flugstufe: Verwendet wurden eine Niedriggewinnantenne für die Kommunikation in der Nähe der Erde und eine Mittelgewinnantenne bei größerer Entfernung zur Erde. Die Niedriggewinnantenne war ungerichtet (omnidirektional), so dass die ausgestrahlte Leistung, die die Erde erreicht, sehr stark mit zunehmender Entfernung abfällt. Bei größerer Entfernung wurde die Mittelgewinnantenne verwendet, welche die Signale in einem gebündelten Strahl in Richtung Erde sendet.
Landephase
Nachdem bei der Landung des Mars Pathfinders zum ersten Mal erfolgreich Airbags eingesetzt worden waren, sollte auch der Mars Exploration Rover in derselben Art und Weise landen: Zuerst wurde das Raumfahrzeug mit dem Hitzeschild in der Marsatmosphäre abgebremst, danach wurde der Fallschirm geöffnet. Kurz vor der Marsoberfläche stoppten Raketen die Sonde vollständig ab, dann wurden um den Lander Airbags aufgeblasen, woraufhin der Lander im freien Fall auf die Oberfläche heruntergelassen wurde. Nachdem er zur Ruhe gekommen war, wurden die Airbags zurückgezogen und der darin enthaltene Rover konnte seine Arbeit aufnehmen.
Landeeinheit
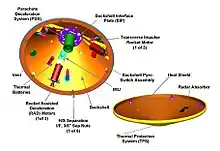

Hitzeschilde
Die Hitzeschilde dienten auch als Schutz für den Lander während der siebenmonatigen Reise zum Mars.[7] Der vordere Hitzeschild schützte den Lander während des Eintritts in die dünne Marsatmosphäre vor der intensiven Hitzeentwicklung. Der hintere Hitzeschild enthielt den Fallschirm, die elektronische Steuerung für den Landeablauf und Raketen, um den Lander in einer Höhe von 10 bis 15 Metern über der Marsoberfläche abzubremsen und um eine eventuell vorhandene Seitwärtsbewegung zu stoppen. Der Hitzeschutzschild bestand aus Aluminium in Sandwich-Wabenkern-Bauweise. Die Außenseite war mit einer Struktur aus Phenolharz in Wabenkern-Bauweise bedeckt. Diese Struktur war gefüllt mit einem wärmeabsorbierenden Material. Dieses bestand aus einer Mischung aus Kork, Bindemittel und kleinen Kieselglas-Kügelchen. Das Material führt die Wärme ab, die durch die Reibung in der Atmosphäre entsteht, und schützt dadurch die Kapsel. Diese Technik kam bereits bei den Viking-Lander-Missionen zum Einsatz.
Fallschirm
Das Design des Fallschirms basierte auf Erfahrungen der Viking- und Pathfinder-Missionen. Während der Öffnung musste der Fallschirm eine Kraft von über 80.000 Newton aushalten. Er hatte einen Durchmesser von 14,1 Metern[8] und bestand aus Polyester und Nylon. Während der Entwicklung des Fallschirms traten einige Probleme auf. So bestand er einen Testabwurf aus einem Hubschrauber heraus nicht oder er öffnete sich nur teilweise. Diese Fehler konnten durch eine Vergrößerung der Öffnung in der Mitte des Schirms behoben werden.[9] Der verfügbare Platz auf der Raumsonde für den Fallschirm ist so klein, dass der Fallschirm mit einer speziellen Vorrichtung unter hohem Druck verpackt werden musste.
Airbags
Für die Mars-Exploration-Rover-Mission wurden die gleichen Airbags benutzt wie beim Mars Pathfinder im Jahr 1997. Diese von ILC Dover (das ebenfalls die Raumanzüge und weitere Technik für die NASA mitentwickelt) hergestellten Airbags mussten so belastbar sein, um den Lander vor dem Aufprall auf Stein oder rauem Gelände abzufedern und etliche Sprünge in hoher Geschwindigkeit auf der Oberfläche zu vollführen. Zudem mussten die Airbags Sekunden vor dem Aufschlag aufgeblasen und nach der sicheren Landung wieder entleert werden. Das Material der Airbags besteht aus Vectran, welches die doppelte Stärke anderer synthetischer Materialien wie Kevlar hat und sich besser an niedrige Temperaturen anpasst.[10] Bei mehreren Tests wurde festgestellt, dass die Airbags durch die zusätzliche Masse (im Vergleich zum Vorgängermodell 1997) den höheren Belastungen nicht standhielten und zerrissen. Die Ingenieure verstärkten deshalb die Airbag-Stoffe, die bei der hohen Geschwindigkeit dem Aufprall auf Steine und Ähnliches auch standhalten.[11] Jeder Rover verfügte über vier Airbags, die aus sechs miteinander verbundenen Kammern bestanden. Durch diese Verbindungen wurden die Kräfte, die bei der Landung auftreten, verteilt und gedämpft. Der Stoff der Airbags war nicht direkt am Rover angebracht, sondern wurde durch gekreuzte Seile am Lander festgezurrt. Diese Seile gaben den Airbags die richtige Form, um das Aufblasen zu erleichtern. Während des Flugs waren die Airbags zusammen mit drei Gasgeneratoren verstaut, die zum Aufblasen benutzt wurden.
Lander
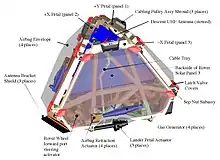
Der Lander der Raumsonde[12] war eine Kapsel, die den Rover beherbergte und während des Aufpralls mithilfe der Airbags beschützte. Der Lander selbst hatte eine leichtgewichtige Struktur, die aus einer dreieckigen Basisfläche und drei „Blütenblättern“ bestand, welche ihm die Form eines Tetraeders gaben. Diese Struktur bestand aus kohlenstofffaserverstärktem Kunststoff. Der Rover selbst wurde innerhalb des Landers mit Bolzen und speziellen Nuten festgehalten, die nach der Landung durch eine kleine Sprengladung entfernt wurden. Die drei Blätter waren mit der Basisfläche über ein Gelenk verbunden. Jedes Blattgelenk hatte einen Motor, der stark genug war, das Gewicht des gesamten Landers anzuheben. Dadurch war es dem Lander möglich, den Rover auf jeden Fall in eine aufrechte Position zu bringen, unabhängig davon, auf welcher Seite der Lander nach den vielen Sprüngen und Drehungen auf der Marsoberfläche zur Ruhe kam. Dies war bei Spirit nicht notwendig,[13] jedoch bei Opportunity.[14] Der Rover enthielt Sensoren, um die richtige Orientierung zur Oberfläche anhand der Schwerkraft zu ermitteln und dann zuerst das Blatt zu öffnen, damit der Rover senkrecht gestellt wurde. Nachdem dies geschehen war, wurden die beiden anderen Seitenteile geöffnet. Dabei wurde die Basisplatte waagrecht ausgerichtet, auch wenn der Lander auf größeren Steinen gelandet wäre.
Nach der Landung musste der Rover fähig sein, sicher vom Lander herunterzufahren, ohne dass sich seine Räder im Airbagmaterial verfangen. Um diesen Prozess zu unterstützen, enthielten die Blätter eine Vorrichtung, die die Airbags langsam zum Lander zurückziehen, damit sie den Rover nicht blockieren. Dies geschah noch bevor die Blätter geöffnet wurden. Zusätzlich waren kleine Rampen (bestehend aus Polyestergewebe „Vectran“) an den Seitenflächen angebracht, die sich ausbreiteten und dadurch eine Fläche bildeten, die den großen Raum zwischen den Blättern ausfüllte und eventuelle Unebenheiten überbrückte. Diese Stoffoberflächen bildeten somit eine kreisförmige Fläche, über die der Rover vom Lander herunterfahren konnte.
Landung
Die Eintritts-, Abstiegs- und Landephase begann, als die Sonde den Eintrittspunkt in die Marsatmosphäre erreichte, welcher 3522,2 Kilometer vom Marsmittelpunkt entfernt war.[15][16] Während dieser Phase erfolgte die Kommunikation über die Niedriggewinn-Antennen, die auf dem Schutzschild und auf dem Rover selbst montiert war. Dies war notwendig, da die Sonde mit dem Hitzeschild in Flugrichtung gedreht wurde und somit keine Antenne auf die Erde ausgerichtet werden konnte. Es wurden in dieser sechsminütigen Phase insgesamt 36 Zehn-Sekunden-Töne zur Erde gesendet. Anhand dieser Töne konnte die Landephase verfolgt werden. Bei einem Misserfolg könnten so wichtige Hinweise auf die Fehlerursache geliefert werden.
Zuerst erfolgte die Trennung des Landers von der Flugstufe. Der Lander trat nun streifend in die Marsatmosphäre bei einer Geschwindigkeit von 19.200 km/h bzw. 5,4 km/s ein. Dabei heizte sich die Außenseite des Hitzeschildes auf 1477 °Celsius auf. Innerhalb von vier Minuten wurde das Raumfahrzeug durch den Hitzeschild auf 1.600 km/h (0,4 km/s) abgebremst. Es befand sich nun in einer Höhe von 9,1 Kilometern über der Oberfläche und der Fallschirm wurde entfaltet. Nach zwanzig Sekunden wurde der Hitzeschild abgeworfen, da er nicht mehr benötigt wurde. Zehn weitere Sekunden später in einer Höhe von 6 km trennte sich der Lander vom rückwärtigen Schild und wurde an einem 20 Meter langen Seil herabgelassen. In 2,4 Kilometer Höhe wurde die tatsächliche Höhe und Sinkgeschwindigkeit über das Radarsystem des Landers bestimmt. Durch diese Messungen konnte das Landesystem bestimmen, wie lange die Bremsraketen gezündet werden müssen, um den Lander zu stoppen. Während der Radarmessungen nahm eine Kamera (descent imager) drei Bilder von der Oberfläche auf und ermittelte dadurch die horizontale Geschwindigkeit des Landers.
In einer Höhe von 284 Metern wurden die Airbags entfaltet. Nun wurden die drei Bremsraketen gezündet, damit der in die Airbags eingepackte Lander in einer Höhe von 10 Metern zum Stehen kam. Das Verbindungsseil wurde nun gekappt, und der Lander fiel auf die Oberfläche. Der Lander mit den Airbags hüpfte nun einige hundert Meter über die Marsoberfläche, bis er zur Ruhe kam.
Aufbau des Rovers
Aufbau
Im Gegensatz zu Mars Pathfinder hatte ein Rover keine feststehende Bodenstation, sondern alle Funktionen waren im Rover integriert. Er war 1,6 Meter lang, bis 1,5 Meter hoch und 185 Kilogramm schwer. Laut Spezifikation sollte er in der Lage sein, je nach Oberflächenbeschaffenheit am Tag etwa 100 m, insgesamt etwa 3 Kilometer zurückzulegen und bis zu sechs Monate auf der Planetenoberfläche einsatzfähig bleiben. Dies übertraf die Fähigkeiten des Vorgängers Sojourner von der Pathfinder-Mission 1997 etwa um den Faktor 60. Der Rover wurde von der NASA selbst als „Robot-Geologe“ (robotic geologist) bezeichnet und besaß sechs unabhängig voneinander angetriebene Räder an stelzenförmigen Teleskopbeinen.
Antrieb
Jeder Rover war mit sechs Rädern aus Aluminium von jeweils 26 cm Durchmesser ausgestattet, die wie bei früheren Marsmissionen von Elektromotoren des Schweizer Herstellers Maxon Motor angetrieben wurden.[17] Das speziell entwickelte Fahrgestell (rocker bogie) kam ohne Federn aus und erlaubten es, auch über Steine zu rollen, die höher als der Durchmesser eines Rades waren, ohne die Balance zu verlieren.[18] Der Schwerpunkt des Rovers lag genau auf der Achse des Fahrgestells. Dies erlaubte dem Fahrzeug eine Schräglage bis zu 45°, die Software verhinderte aber Schräglagen von mehr als 30°.[16] Ein zusätzliches Trägheitsmesssystem ermittelte die Neigung des Rovers und half dabei, präzise Bewegungen auszuführen.[19]
Der Rover erreichte auf flachem Boden eine Höchstgeschwindigkeit von 5 Zentimetern je Sekunde. Um eine sichere Fahrt zu gewährleisten, stoppte die Gefahrvermeidungssoftware den Rover alle 10 Sekunden, überprüfte dann die Umgebung innerhalb von 20 Sekunden und fuhr dann wieder 10 Sekunden weiter. Dadurch wurde eine Durchschnittsgeschwindigkeit von ca. einem Zentimeter pro Sekunde erreicht. Vorgesehen war während der Primärmission eine Strecke von 600 bis 1000 Metern, Opportunity erreichte in diesen 90 Sols 811 Meter, Spirit über 600 Meter.
Die Rekordstecke von 220 gefahrenen Metern legte Opportunity an Sol 410 (20. März 2005) zurück.[20] Bis zum Ende seiner Mission hatte Spirit eine Strecke von 7730 Metern zurückgelegt. Opportunity fuhr bis zum 10. Juni 2018 eine Strecke von 45,16 km.
Instrumentierung
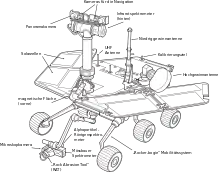
Jeder Rover hatte durch seine Instrumente Fähigkeiten, die es ihm ermöglichten, wie ein Geologe auf der Erde seine Umgebung nach interessanten Steinen und Böden zu durchsuchen und ihre Zusammensetzung und Struktur zu ermitteln.[5] Spirit und Opportunity hatten jeweils den gleichen Satz an Instrumenten:
- Eine Panoramakamera (PanCam, vom JPL)
- Ein Infrarotspektrometer („Miniature thermal emission spectrometer“, Mini-TES, von der Arizona State University, Tempe)
- Ein Mößbauer-Spektrometer (von der Johannes Gutenberg-Universität Mainz)
- Ein Alphapartikel-Röntgenspektrometer (APXS) (vom Max-Planck-Institut für Chemie in Mainz)
- Eine Mikroskopkamera (vom JPL)
Diese Instrumente wurden unterstützt durch das „Rock Abrasion Tool“ (RAT) der Firma Honeybee Robotics, New York. Dieses Werkzeug war quasi der „Geologenhammer“ der Rover, denn damit konnten einige Millimeter der verwitterten Oberflächen von Steinen entfernt werden, um dann die darunter liegenden Schichten zu untersuchen. Das Werkzeug konnte eine Fläche von 4,5 cm Durchmesser freilegen und bis in eine Tiefe von fünf Millimetern bohren. Das RAT war mit der Mikroskopkamera, dem APXS und dem Mößbauer-Spektrometer am Ende eines Roboterarms (entwickelt von Alliance Spacesystems, Pasadena) angebracht. Das RAT enthielt eine Abdeckplatte aus Überresten aus dem Zusammensturz des World Trade Centers 2001 in New York.
Der Marsstaub ist stark magnetisch. Dieser Staub wurde durch magnetische Flächen (entwickelt vom Niels-Bohr-Institut in Kopenhagen, Dänemark) eingefangen, um Proben davon zu untersuchen. Magnetische Mineralien in Staubkörnern könnten gefriergetrocknete Überreste aus der wasserreichen Vergangenheit des Mars sein. Eine periodische Untersuchung dieser Partikel und ihrer Ansammlungsmuster auf den Magneten könnte Hinweise auf ihre Zusammensetzung liefern. Das RAT trug ebenfalls Magnete, um den Staub der Steinoberflächen aufzufangen und zu studieren. Ein zweiter Satz Magnete war auf der Vorderfront des Rovers angebracht, um umherfliegenden Staub zu sammeln und mit dem Mößbauer-Spektrometer und dem APXS zu analysieren. Ein dritter Magnet war auf dem Roverdeck montiert und konnte mit der Panoramakamera fotografiert werden.
Panoramakamera

Diese hochauflösende Stereokamera bildete für jeden neu angefahrenen Ort das umgebende Gelände ab und bot dadurch den geologischen Kontext für Untersuchungen. Die beiden Objektive waren 30 Zentimeter voneinander entfernt und saßen auf einem Mast in 1,50 Meter Höhe über dem Boden. Das Instrument verfügte über 14 unterschiedliche Filter, mit denen sich nicht nur Farbbilder aufnehmen, sondern auch spektrale Analysen von Mineralien und der Atmosphäre machen ließen. Diese Bilder halfen dabei, Steine und Böden als Untersuchungsziele auszuwählen und neue Fahrziele für die Rover zu definieren.
Miniature Thermal Emission Spectrometer
Das MiniTES zeigte die Umgebung im infraroten Wellenbereich und diente dazu, Mineralien vor Ort zu identifizieren. Durch die Untersuchungen im Infrarotbereich ließ sich damit durch den alles bedeckenden Staub sehen, um Karbonate, Silikate, organische Moleküle und in Wasser entstandene Mineralien zu erkennen. Ebenso ließ sich abschätzen, wie Steine und Böden die Wärme innerhalb eines marsianischen Tages halten. Ein Ziel war die Suche nach charakteristischen Mineralien, die unter dem Einfluss von Wasser entstanden sind. Die Daten dieses Instruments und der Panoramakamera wurden verwendet, um wissenschaftliche Ziele auszusuchen und neue Regionen zu erforschen. Außerdem wurde es verwendet, um ein hochaufgelöstes Temperaturprofil der marsianischen Atmosphäre zu ermitteln. Diese Daten vervollständigten die Daten, die vom Mars Global Surveyor Orbiter ermittelt wurden.
Mößbauer-Spektrometer
Das Mößbauer-Spektrometer diente zur Identifikation eisenhaltiger Mineralien. Es war am Roboterarm angebracht und wurde auf Steine oder an den Boden gehalten. Es identifizierte eisenhaltige Mineralien und half dadurch den Wissenschaftlern herauszufinden, welche Rolle das Wasser bei der Entstehung der untersuchten Objekte gespielt hatte und bis zu welchem Ausmaß Steine verwittert waren. Zudem konnte es Mineralien identifizieren, die in einer heißen wasserhaltigen Umgebung entstanden waren, und die Hinweise auf ehemaliges Leben bewahrt haben könnten. Das Instrument benutzte zwei Kobalt57-Quellen um seine Messungen zu kalibrieren. Es war eine verkleinerte Version von Spektrometern, die Geologen verwenden, um Steine und Böden auf der Erde zu untersuchen. Da Kobalt57 eine Halbwertszeit von 271 Tagen hat, dauerten Untersuchungen hiermit inzwischen erheblich länger als während der Primärmission. Das Spektrometer konnte auch die magnetischen Eigenschaften von Oberflächen ermitteln.
Alpha Particle X-Ray Spectrometer

Mit dem APXS wurde die Zusammensetzung von Steinen bestimmt. Dieses Instrument war eine verbesserte Version des vom Sojourner Rover der Pathfinder-Mission verwendeten Geräts. Es war ähnlich aufgebaut wie Instrumente, die in geologischen Laboratorien auf der Erde benutzt werden. Es verwendete Curium244, um die Konzentration der wichtigsten Elemente (außer Wasserstoff) zu messen, aus denen Steine und Böden bestehen. Dadurch lässt sich die Herkunft der Proben feststellen und in welcher Weise sie im Laufe der Zeit verändert wurden.
Mikroskopkamera
Die Mikroskopkamera konnte von Objekten extreme Nahaufnahmen mit einer Auflösung von einigen hundert Mikrometern erstellen und damit einen Kontext zur Interpretation der Daten über Mineralien und Elemente bieten. Mit ihr ließen sich feinstrukturierte Eigenschaften von Steinen und Böden untersuchen. Diese kleinen Strukturen gaben wichtige Hinweise, wie Steine und Böden geformt wurden. Zum Beispiel ließ sich durch die Größe und Anordnung von Partikeln in Sedimenten ermitteln, wie diese transportiert und abgelagert wurden. Diese Kamera bot Großaufnahmen davon, um diese Prozesse zu untersuchen.
Weitere Instrumente
Auch die Räder der Rover konnte als Werkzeug dienen: Sie wurden einzeln bewegt und konnten dadurch auch als Schürfgeräte eingesetzt werden, um den Untergrund aufzuwühlen und damit einige Zentimeter des Bodenprofils mechanisch und fotografisch zu untersuchen.
Zur Kalibrierung der Panoramakamera wurde eine Art „Sonnenuhr“ benutzt, die auf der Oberseite des Rovers montiert war. Dieses Objekt wurde verwendet, um Korrekturen der aufgenommenen Bilder zu machen. An den Ecken der Sonnenuhr waren farbige Flächen angebracht, mit denen die Farben der Marsbilder kalibriert werden konnten.
Kommunikation
Jeder Rover besaß eine Niedriggewinn- und eine Hochgewinnantenne. Die Niedriggewinnantenne war omnidirektional und übertrug die Daten mit einer niedrigen Rate zu den Deep-Space-Network-Antennen auf der Erde. Diese Antennen wurden ebenfalls verwendet, um mit den Sonden im Orbit um Mars zu kommunizieren, wie Mars Odyssey und (bis zu seinem Ausfall) dem Mars Global Surveyor. Die Hochgewinnantenne war gerichtet, steuerbar und konnte die Daten mit einer höheren Rate zur Erde übertragen. Eine Kommunikation konnte auch über den Mars Express Orbiter[21] der ESA oder den Mars Reconnaissance Orbiter[22] erfolgen. Die Orbiter leiteten die Daten von und zur Erde weiter, die meisten Daten zur Erde wurden über Odyssey weitergegeben.
Die Übertragung über die Orbiter hatte den Vorteil, dass diese näher an den Roverantennen sind als die Erde und deshalb weniger Energie benötigt wurde. Zudem waren die Orbiter länger in Sichtweite der Erde als die Rover. Die Orbiter kommunizierten mit den Rovern über eine UHF-Antenne, die eine kleinere Reichweite hatten als die Niedriggewinn- und Hochgewinnantennen. Bei einer direkten Kommunikation mit der Erde betrug die Übertragungsrate zwischen 3.500 und 12.000 Bits je Sekunde.[23] Die Übertragungsrate zu den Orbitern betrug konstant 128.000 Bits je Sekunde. Ein Orbiter war während des Überflugs für ca. acht Minuten pro Sol in der Sichtweite des Rovers. Während dieser Zeit wurden ca. 60 Megabit Daten übertragen. Bei der direkten Übertragung zur Erde würde die Übertragung dieser Datenmenge zwischen eineinhalb und fünf Stunden benötigen. Die Rover konnten aufgrund von Einschränkungen in der Energieversorgung jedoch nur knapp drei Stunden Daten pro Tag zur Erde übermitteln.
Energieversorgung
Die Stromversorgung geschah durch Solarpaneele, welche die gesamte Oberseite des Rovers bedecken und eine Fläche von 1,3 m2 aufwiesen. Um die zur Verfügung stehende Fläche zu maximieren, waren die Paneele auf eigenen Flügeln angebracht, die nach der Landung ausgeklappt wurden.
Die aus Galliumarsenid bestehenden Solarzellen waren in drei Schichten angeordnet, um die Energieausbeute zu optimieren. Sie lieferten eine Energie von 900 Wattstunden pro Marstag. Am Ende der Primärmission war erwartet worden, dass nur noch 600 Wattstunden zu Verfügung stehen, weil sich Staub auf den Zellen absetzt und sich auch die Jahreszeit ändert.[16] Eigentlich waren die Planungen aufgrund von Erfahrungen der Pathfinder-Mission davon ausgegangen, dass sich mit der Zeit eine Staubschicht auf den Solarzellen absetzt und die Stromversorgung nach einigen Monaten abbricht. Jedoch war die Atmosphäre nicht so staubig wie erwartet (in Meridiani Planum) oder die Solarzellen wurden von Staubteufeln und Windböen unerwartet gereinigt, wodurch sie wieder fast soviel Strom wie zu Beginn der Mission lieferten. Während des Betriebs musste auch der Winkel zur Sonne berücksichtigt werden, der sich je nach Jahreszeit und Neigung des Rovers (z. B. an Berghängen) ändert. Die gewonnene Energie wurde in zwei Lithium-Ionen-Akkumulatoren mit einer Kapazität von je 8 Amperestunden gespeichert.
Technische Kameras
Jeder Rover hatte neben den wissenschaftlichen Kameras noch sechs weitere, um den Rover bei der Fortbewegung zu unterstützen. Dabei handelte es sich um vier HazCams (Hazard Avoidance Cameras, Hindernisvermeidungskameras) und zwei Navigationskameras.
Die HazCams waren jeweils paarweise im unteren Bereich der Vorder- und Rückseite des Rovers angebracht. Mit diesen Schwarzweiß-Kameras konnte ein dreidimensionales Abbild der Umgebung geschaffen werden. Dadurch konnte der Rover in Verbindung mit der Software Hindernissen ausweichen. Die Kameras hatten einen Blickwinkel von 120°. Mit ihnen konnte das Gebiet bis in eine Entfernung von drei Metern überblickt werden.
Auf dem Instrumentenmast war die Navigationskamera angebracht. Mit dieser konnte eine dreidimensionale Umgebungsaufnahme erzeugt werden. Die NavCam bestand aus zwei Kameras in einem Abstand von 30 cm, mit jeweils einem Blickwinkel von 45°. Mit diesen Bildern konnten die Wissenschaftler und Ingenieure auf der Erde eine Planung für die Navigation des Rovers erarbeiten. Die Kameras arbeiteten zusammen mit den HazCams, indem sie eine ergänzende Sicht zur umliegenden Landschaft lieferten. Durch diese Kameras war es dem Rover möglich, sich selbständig fortzubewegen und Hindernissen auszuweichen, ohne auf Kommandos von der Erde zu warten.
Temperaturkontrolle
Während eines Marstages kann die Temperatur um 113 Grad Celsius differieren. Die Elektronik des Rovers funktionierte jedoch nur in einem Temperaturbereich von −40 bis +40 Grad Celsius. Deshalb sind die wichtigsten Teile wie Batterien, Elektronik und Computer innerhalb des Rovers in einer isolierten Box eingepackt, in der Warm Electronics Box (WEB).[24] Durch eine Goldbeschichtung der Außenseite, eine Isolierung aus Aerogel und durch Heizelemente wurde der Innenbereich des Rovers warm gehalten. Überschüssige Wärme wurde über Radiatoren abgestrahlt. Eine Grundversorgung mit Wärme übernahmen acht Radioisotopenheizelemente. Jedes Element produzierte ein Watt Wärme und enthält 2,7 Gramm Plutoniumdioxid in einer kleinen Kapsel.[16] Diese Komponenten stellten sicher, dass der Rover im kalten Klima des Mars nicht einfror.
Software
Der Computer jedes Rovers verfügte über einen 32-Bit Rad 6000 Mikroprozessor, eine Version des PowerPC-Chips, der in älteren Macintosh-Computern verwendet wurde. Diese Variante war jedoch speziell gegen Strahlung gehärtet und wurde schon in vielen Raumfahrtmissionen eingesetzt. Der Prozessor arbeitete mit einer Geschwindigkeit von 20 Millionen Instruktionen pro Sekunde. Der Computerspeicher bestand aus 128 MiByte RAM, ergänzt um 256 MiByte Flash-Speicher. Zudem gab es noch einige kleinere Bereiche von nichtflüchtigem Speicher, der dazu verwendet wurde, Daten für das System auch ohne Stromversorgung zu speichern.[25] Der Computer verwendete das Echtzeitbetriebssystem VxWorks der Firma WindRiver, welches 2 Megabyte Speicher belegt. Die restliche Steuerungssoftware hatte einen Umfang von 30 Megabytes.[26] Die Software selbst wurde regelmäßig weiterentwickelt, um Fehler zu beheben oder um die Eigenständigkeit der Rover beim Fahren zu verbessern.
Der Rechner war auch zuständig für die Bildverarbeitung. Die qualitativ hochwertigen Aufnahmen der PanCam-Kameras mussten zur Datenübertragung komprimiert werden, da größere Bilder auch mehr kostbare Übertragungszeit benötigen. Die dafür am JPL entwickelte ICER-Bildkompression basierte auf Wavelets und verkleinerte Bilder von 12 Megabit auf nur ein Megabit. Zudem wurde das Bild in 30 unabhängige Bereiche aufgeteilt. Dadurch verringerte sich die Wahrscheinlichkeit, ein ganzes Bild auf einmal bei der Übertragung zur Erde zu verlieren.[27]
Missionsüberblick
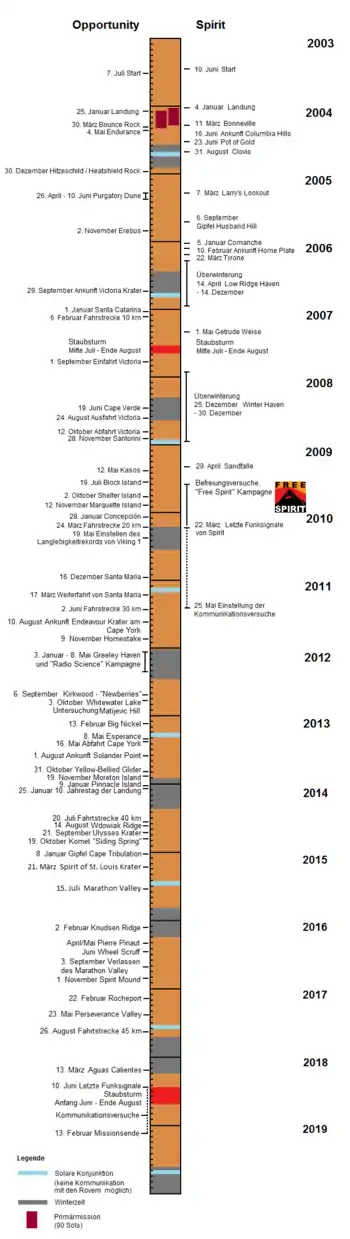
Dieser Abschnitt gibt jeweils eine kurze Zusammenfassung des Missionsablaufs der beiden Rover. Eine detailliertere Beschreibung findet sich in den Artikeln von Spirit und Opportunity.
Spirit

Primärmission
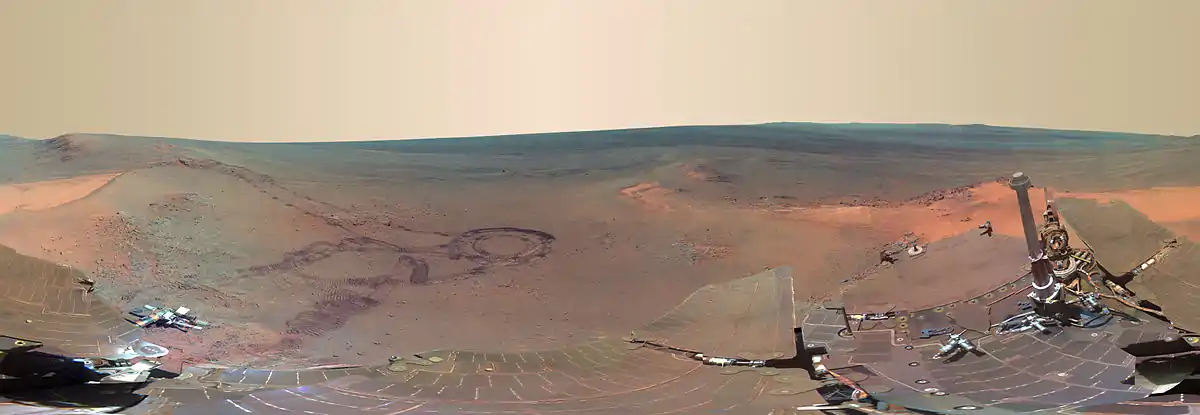
Spirit landete am 4. Januar im Gusev-Krater (14,57 Grad Süd und 175,47 Grad West) um 4:35 UTC (Erdzeit). Nach der problemlosen Landung sendete Spirit erste Aufnahmen der Umgebung, die relativ arm an größeren Steinen ist. Innerhalb von 12 Sols entfaltete sich der Rover und wurde zum Herabfahren vom Lander vorbereitet. Während dieser Zeit wurden auch die Instrumente getestet. Nachdem sich der Rover um 120° auf der Plattform gedreht hatte, fuhr er am 15. Januar von der Plattform herunter. Zuerst sollte ein Stein namens „Adirondack“ untersucht werden. Während dieser Untersuchung ging der Kontakt zu Spirit fast vollständig verloren, und es konnte erst einige Tage später wieder rudimentärer Kontakt aufgebaut werden. Grund war, dass durch einen Softwarefehler der Computer des Rovers permanent neu gestartet wurde. Nach der Neuformatierung der Flash-Speicher des Computers konnte der Rover an Sol 33 (6. Februar 2004) seine Arbeit an Adirondack wieder aufnehmen. Es stellte sich heraus, dass die Steine in Spirits Umgebung hauptsächlich vulkanischer Natur waren und keine eindeutigen Anzeichen von Wassereinfluss zeigten. Um an ursprüngliches Grundgestein heranzukommen, fuhr Spirit während der Primärmission in Richtung des größeren Kraters Bonneville. Hier stellte sich heraus, dass dieser fast vollständig mit Sand gefüllt war und keine der erhofften Gesteinsaufschlüsse zeigte.
Columbia Hills
Deshalb wurde beschlossen, Spirit zu den Hügeln von Columbia Hills in fast 2,5 Kilometern Entfernung zu bringen. Der Rover erreichte die Basis dieser Berge im Juni 2004. Innerhalb von mehr als einem Jahr und einer Strecke von 4,81 Kilometern erklomm Spirit dann den höchsten Berg namens „Husband Hill“ am 21. August 2005. Bei der Untersuchung der Steine an den Hängen des Berges wurden erste deutliche Hinweise auf Einfluss von Wasser entdeckt. Während des Aufstieges wurde die Stromversorgung schlagartig besser, weil Staubteufel die Solarpaneele fast vollständig vom abgelagerten Staub befreit hatte. Bis zum Februar 2006 fuhr Spirit wieder herunter und erreichte die Formation „Home Plate“, die geschichtete Steinablagerungen zeigte und wahrscheinlich vulkanischer Natur ist.
Home Plate
Nach Untersuchungen an der Home Plate sollte Spirit den Hügel McCool Hill untersuchen, wurde jedoch dadurch aufgehalten, dass ein Rad nun vollständig blockierte. Deshalb überwinterte Spirit an einem niedrigen Felsgrat namens „Low Ridge Haven“. Nach dem Winter führte Spirit die Untersuchungen der Home Plate weiter. Durch das festsitzende Vorderrad wühlte Spirit hellen Sand auf. Dieser bestand zu 90 % aus Silikaten, deren Entstehung nur durch die Existenz von Wasser erklärt werden konnte. Von Juni 2007 bis Ende August 2007 führte ein Staubsturm dazu, dass Spirit aufgrund der stark verminderten Sonneneinstrahlung keine Untersuchungen machen konnte. Anfang 2008 wurde Spirit auf der Nordseite an einem steileren Abstieg der Home Plate positioniert, um den aufkommenden Winter über die maximal mögliche Energie zu erhalten. Ab Mitte August 2008 begann Spirit wieder mit eingeschränkten Untersuchungen, da die Stromversorgung durch die wieder stark verstaubten Solarzellen weiterhin sehr gering war.
Spirit als stationäre Sonde am Ort Troy
Im Dezember 2008 begann Spirit mit einer längeren Fahrt zu zwei geologischen Formationen, die informell als „Goddard“ und „von Braun“ benannt wurden. Da die kürzere Route über die Home Plate nicht zu erreichen war, wurde beschlossen, die Home Plate auf der nördlichen Seite zu umfahren, und dann an dessen Westseite zu den beiden Zielen zu fahren. Während der Fahrt in Richtung „von Braun“ gruben sich Spirits Räder am 26. April 2009 im lockeren Sand so weit fest, dass vorerst kein Fortkommen mehr möglich war. Die NASA untersuchte an einem Testrover die Möglichkeiten, den Rover wieder freizubekommen. Mehrmals wurde erfolglos versucht, den Rover durch vorsichtiges Vor- und Zurückfahren wieder zu befreien. Anfang 2010 wurde von der NASA entschieden, den Rover an diesem Ort stehen zu lassen und nur noch die nähere Umgebung per Roboterarm zu untersuchen. Es wurde mit Vorbereitungen für den Winter begonnen (Ausrichten der Solarzellen), um die Energieversorgung sicherzustellen.[28] Durch den aufkommenden Marswinter konnte Spirit nicht mehr genug Energie erzeugen und schaltete sich in einen Winterschlafmodus. Die letzten Funksignale des Rovers wurden am 22. März 2010 empfangen – seither schwieg Spirit. Die NASA versuchte in den Monaten darauf erfolglos, mit dem Rover zu kommunizieren. Am 25. Mai 2011 wurde der Rover von der NASA aufgegeben, da davon ausgegangen wurde, dass es durch die lange Winterzeit ohne genug Energie zum Heizen zu irreparablen Defekten in der Elektronik gekommen sein muss.
Opportunity
Primärmission
Opportunity landete in Meridiani Planum (1,95 Grad Süd und 354,47 Grad West) am 25. Januar 2004 um 5:05 UTC. In dieser an Kratern armen Ebene kam der Lander mitten in einem kleinen Krater namens „Eagle Crater“ zur Ruhe. Bereits nach 6 Tagen konnte Opportunity vom Lander herunterfahren. Nur wenige Meter weiter konnte der Rover am Kraterrand einen kleinen geschichteten Gesteinsaufschluss untersuchen. Hierbei wurden Strukturen entdeckt, die nur in fließendem Wasser entstehen können und einen hohen Hämatitgehalt haben. Es stellte sich heraus, dass im Krater und in der ganzen Ebene größere Flächen durch kleine Kügelchen (genannt Spherules oder Blueberries) aus Hämatit bedeckt sind. Nach der Untersuchung des Eagle-Kraters wurde als neues Ziel der Endurance-Krater in 800 m Entfernung ausgewählt, der mit einer Tiefe von 20 m noch mehr von der Historie der Meridiani Ebene freigab. Opportunity erreichte den Krater am Ende der Primärmission. Der Rover umfuhr den Krater zuerst teilweise, um eine Einstiegsroute in den Krater zu finden. An den Kraterwänden wurden ebenfalls geschichtete Strukturen entdeckt. Im Juni 2004 begann der Abstieg in den Krater. Dabei wurden in regelmäßigen Abständen die Steinschichtungen mit dem Steinschleif-Werkzeug, dem Mikroskop und den Spektrometern untersucht. Nach der Untersuchung einer steilen Kraterwand verließ der Rover den Krater im Dezember 2004.
Auf dem Weg zum Victoria-Krater
Das nächste Ziel, welches mehr Informationen über die Geschichte der Ebene versprach, war der noch größere Victoria-Krater in 6000 m Entfernung in südlicher Richtung. Auf dem Weg dorthin wurden mehrere kleinere Krater untersucht. Dabei kam der Rover an seinem eigenen Hitzeschild vorbei, und es ergab sich die einzigartige Möglichkeit, dieses Bauteil nach seinem Einsatz zu untersuchen. Dabei stieß Opportunity auch auf einen Meteoriten aus Eisen, der ebenfalls untersucht wurde. Während der Reise in der Meridiani-Ebene kam der Rover sehr gut voran und fuhr teilweise 200 m pro Tag. Am 26. April 2005 fuhr sich der Rover in einer kleinen Sanddüne fest, aus welcher Lage er sich erst fünf Wochen später befreien konnte. Auf dem weiteren Weg wurden weitere kleine Krater passiert und erforscht, die teilweise stark unter dem Wüstensand begraben waren.
Victoria-Krater
Ende September 2006 hatte der Rover den Krater Victoria erreicht und konnte erste Fotografien des Kraterinneren machen. Auch hier wurden an den Kraterrändern geschichtete Steinstrukturen entdeckt. Nun umfuhr Opportunity den Krater zuerst zu einem Viertel nach Norden, um weitere Fotografien zu erstellen und wiederum einen Einstiegspunkt zu finden. Dabei wurde er aus dem Orbit durch hochauflösende Aufnahmen des Mars Reconnaissance Orbiters unterstützt. Der Krater selbst hat einen Durchmesser von 750 m und ist damit fünfmal größer als der bereits untersuchte Endurance-Krater. Im Juni 2007 sollte der Rover in den Victoria-Krater an jener Stelle hineinfahren, an der er ursprünglich angekommen war. Er wurde jedoch durch denselben Staubsturm wie Spirit vorerst daran gehindert und man musste sich um die Erhaltung der Energieversorgung kümmern. Nachdem sich der Sturm gelegt hatte und die Atmosphäre wieder aufklarte, fuhr der Rover in den Krater hinein und erreichte fast eine der geschichteten Klippen. Ende August 2008 fuhr Opportunity wieder aus dem Krater heraus, weil ein mögliches Blockieren des Vorderrades befürchtet wurde.
Cape York am Endeavour-Krater
Als nächstes Ziel für Opportunity wurde der 22 km große Krater Endeavour in ca. 12 km direkter Entfernung ausgewählt. Die Fahrtdauer wurde auf mindestens zwei Jahre geschätzt. Man hoffte, dort noch tiefere Gesteinsschichten untersuchen zu können. Da versucht wurde, möglichst über unproblematisches Gelände zu fahren, verlängerte sich die Fahrtstrecke auf 19 km. Am 16. Dezember (Sol 2450) erreichte der Rover den 80 m großen Krater „Santa Maria“ und untersuchte ihn bis in den März hinein genauer. Die restlichen 6 km konnte der Rover bis zum 10. August 2011 zurücklegen, und erreichte nach einer problemlosen Fahrt sein erstes Ziel am Rand des Endeavour-Kraters, Cape York. Insgesamt betrug die zurückgelegte Wegstrecke 21 km, die in fast 3 Jahren Fahrtzeit zurückgelegt wurden.[29] Am Cape York wurde ein Stein untersucht, der wohl durch heißes Wasser modifiziert wurde.[30] Zudem wurden zum ersten Mal Gipsadern auf dem Mars entdeckt, die ebenfalls durch Wasser entstanden sein müssen. Im Laufe des Jahres 2014 erklomm der Rover eines der Randgebirge des Kraters, „Cape Tribulation“, im Süden von Cape York. Im Jahr 2015 fuhr der Rover in das sogenannte Marathon-Valley, um weiter nach lehmhaltigen Gesteinen zu suchen. Danach fuhr der Rover weiter zum Perseverance Valley, bei dem in Orbitalaufnahmen ein Gully entdeckt wurde, der durch fließendes Wasser entstanden sein könnte. Diese Struktur wurde 2017 und 2018 untersucht. Im Juni 2018 kam ein Staubsturm auf, der rasch den ganzen Planeten umhüllte. Dadurch konnten die Solarpaneele keinen Strom mehr für die Sonde erzeugen, weshalb die Kommunikation abbrach. Seit dem 10. Juni, dem 5111. Marstag (Sol) seit der Landung, wurde von der Opportunity Raumsonde kein Signal mehr empfangen. Am 13. Februar 2019 stellte die NASA ihre Versuche ein, erneut Kontakt aufzunehmen, und erklärte die Mission Opportunity offiziell für beendet.[31]
Betrieb bei der NASA
Primärmission
Bereits während der Flugphase trainierte das Wissenschaftsteam den Missionsablauf mit zwei identischen Testmodellen der Rover. Dabei wurden dieselben Computerprogramme wie später bei der echten Operation verwendet, und auch der Zeitversatz bei der Kommunikation mit dem Mars wurde berücksichtigt. Diese Testläufe dauerten teilweise Wochen und dienten dazu, dass das Team die Steuerung der komplexen Maschinen kennenlernt und in der heißen Phase der Primärmission gut zusammenarbeitet.[32]
Während der Primärmission wurden die Arbeitszeiten für die Missionsbeteiligten an die Marszeit angepasst, damit keine Leerlaufzeiten während des Betriebs der Rover auftreten. Da ein Marstag ca. 40 Minuten länger als ein Erdtag dauert, verschoben sich auch die Arbeitszeiten jeden Tag. Die NASA stellte dafür auch spezielle Uhren zur Verfügung, die nach der Marszeit ausgerichtet waren und den Mitarbeitern bei der Koordination in den Meetings helfen sollten. Das Missionsteam mit den Ingenieuren und Wissenschaftlern wurde in zwei Mannschaften aufgeteilt, die jeweils einen Rover betreuten. Dazu richtete man in einem Gebäude im JPL-Komplex zwei Stockwerke her, die sich farblich unterschieden (rote Farbmarkierungen für Spirit, blaue für Opportunity), damit sich die Mitarbeiter besser orientieren können.[2]
Da die Rover an genau entgegengesetzten Plätzen auf dem Mars gelandet waren, begann eine Schicht der einen Mannschaft dann mit ihrer Arbeit, wenn das andere Team seine Schicht gerade beendet hatte. Bei Schichtanfang wurde in alter NASA-Tradition jeweils ein Wecklied (wake-up song) gespielt, um den Rover „aufzuwecken“. Dabei hatten die gewählten Lieder meist einen Bezug zur aktuellen Aufgabe des Tages. Als die Mission in die Verlängerung ging, wurde die Schichtarbeit wieder zu normalen Arbeitszeiten umorganisiert. Die Rover erhielten nicht mehr jeden Tag ihre Befehle, sondern nur noch jeden zweiten Tag, oder einen längeren Aktionsplan über das Wochenende.
Betrieb des Rovers
Da eine unmittelbare Steuerung des Rovers aufgrund der Signallaufzeit von durchschnittlich 20 Minuten nicht möglich war, musste jeder Einsatz im Vorhinein geplant werden. Dies geschah auf der Erde durch Einsatz von Simulations- und Planungssoftware. Zudem existierten auf der Erde noch zwei baugleiche Rover, mit denen gewünschte Aktionen vorher gefahrlos getestet werden konnten, bevor sie auf dem Mars ausgeführt wurden. Dies war zum Beispiel notwendig, um den festgefahrenen Rover Opportunity aus einer Sanddüne herauszumanövrieren.
Planung einer Roveroperation
Zuerst werteten die Ingenieure und Wissenschaftler die Ergebnisse der vorigen Auftrags an den Rover aus. Dabei wurde geprüft, ob der Rover alle Aktionen ausführen konnte oder ob und aus welchen Gründen er abbrechen musste. Aufgrund der aufgenommenen Bilder wurden 3D-Modelle entworfen, welche die Umgebung so weit wie möglich abbildeten. Hierbei half die „Science Activity Planner (SAP)“-Software.[33] Diese Software erstellte automatisch Panoramen der Umgebung, bot eine dreidimensionale Darstellung des Rovers in seiner Umgebung und eine Auswertung der aufgenommenen Spektren. Wichtig war dabei auch die Schnelligkeit, in der die Daten aufbereitet zur Verfügung gestellt werden, da ein neuer Plan bereits die nächsten Stunden vorliegen musste. Hilfreich waren zudem die hochauflösenden Bilder der Kameras der Mars Orbiter, mit denen auch ein grobes 3D-Modell der Landschaft erstellt werden kann. Diese Ergebnisse wurden von einer wissenschaftlichen Gruppe (Science Operating Working Group) ausgewertet, welche dann neue Ziele definierte. Bei der Planung der Aktivitäten und Beobachtungen für den nächsten Sol musste auch der Zustand des Rovers berücksichtigt werden, z. B. Ladezustand der Batterie, Strombedarf jeder Aktion, Sonnenstand, Berücksichtigung der Übertragungszeiten der Daten über die Orbiter.
Auch die Route, die der Rover zum nächsten Ziel zu fahren hatte, musste geplant werden. Hierbei gab es mehrere Möglichkeiten, den Rover zu navigieren. Bei der gesteuerten Fahrt wurde die Fahrtroute vorgegeben, und es wurden auch die Motoren genau gesteuert. Bei der Methode des „Visual Odometry“ wurde die ermittelte Wegstrecke anhand der gemessenen Radumdrehungen mit den Bildaufnahmen verglichen, um die tatsächliche Fortbewegung zu ermitteln. Dies war besonders auf sandigen Böden hilfreich, wenn der Rover auf dem Untergrund rutschte. Anhand der aufgenommenen Bilder erkannte der Rover selbständig die gefahrene Strecke.[34] Durch die Methode der „lokalen Pfadauswahl“ erkannte er auch Hindernisse auf der Strecke, ermittelte eine Ausweichstrecke und umfuhr das Objekt selbständig. Es wurden nur spezielle Verbotszonen definiert, in die der Rover nicht hineinsteuern durfte. Die weiten Fahrten über 100 m während der Mission konnten nur durch diese intelligente Software gelöst werden, da die Planung auf der Erde anhand von Stereobildern nicht so weit reichte. Durch die intelligente Steuerung konnte z. B. Spirit die Strecke zu den Columbia Hills 50 % schneller bewältigen als nur mit gesteuerter Fahrt. Unterstützung erhielt der Rover von der Sonne. Er konnte seine aktuelle Orientierung und Lage anhand der Sonnenposition bestimmen. Dies geschah durch eine Aufnahme der Sonne am erwarteten Ort und der anschließenden Analyse des Bildes, um die wahre Sonnenposition herauszufinden.[35]
Sonstiges
Einige Tage im Jahr verschwindet der Mars von der Erde aus gesehen hinter der Sonne (Konjunktion). Während dieser Zeit ist eine Kommunikation mit den Marssonden durch den Einfluss der Sonne nicht möglich. Die Rover standen während dieser Zeit still, nahmen aber Panoramafotos auf und untersuchten die Atmosphäre oder Steine mit dem Mößbauer-Spektrometer.
Für die Primärmission entstanden insgesamt 820 Millionen Dollar Kosten, davon entfielen 645 Millionen Dollar auf die Entwicklung der Raumfahrzeuge und der wissenschaftlichen Instrumente. Der Raketenstart kostete 100 Millionen Dollar, 75 Millionen Dollar entfielen auf die Missionsoperation und die wissenschaftliche Auswertung.[16] Die weiteren Betriebskosten für beide Rover lagen bei 20 Millionen Dollar pro Jahr.[36]
Zusammenarbeit mit anderen Marsmissionen
Bereits während der Landephase wurden auch Daten vom Mars Rover Lander über die UHF-Antenne an den Mars Global Surveyor Orbiter geschickt, um die Landung zu überwachen. Kurz nach der Landung konnte der Landeort von Spirit vom MGS Orbiter am 19. Januar 2004 in einer Auflösung fotografiert werden, bei der auch der Fallschirm, der Hitzeschild und die Abdrücke der Airbags identifiziert wurden. Gleiches konnte vom Landegebiet von Opportunity am 9. Februar 2004 erzielt werden.[37]
Diese Informationen dienten den Roverplanern dazu, den genauen Landeort zu bestimmen, die zu fahrenden Strecken zu planen und aufgenommene Objekte am Marshorizont zu identifizieren. Beide Landegebiete wurden in der Folge mehrmals aus unterschiedlichen Winkeln fotografiert, um daraus ein 3D-Modell der Topographie zu gewinnen. Dies war zum Beispiel wichtig, um während des Marswinters Hänge zu finden, an denen der Rover schräggestellt am besten überwintern kann, oder um eine Einfahrtsroute in einen Krater zu finden.
Nach der Ankunft des Mars Reconnaissance Orbiters mit seiner hochauflösenden Farbkamera HiRISE konnten detaillierte Aufnahmen der aktuellen Umgebung der Mars Rover gemacht werden, bei der selbst die Fahrspuren zu sehen waren. Es wurden auch gemeinsame Messungen der Atmosphäre und der Umgebung vom Boden und vom Orbit heraus vorgenommen. Der Rover Opportunity und der Orbiter Mars Global Surveyor besitzen ähnliche Instrumente: das MiniTES auf Opportunity und ein normales Thermal Emission Spectrometer (TES) im Orbiter. Opportunity analysierte die Atmosphäre mit Blick schräg nach oben, während der Global Surveyor diese mit Blick nach unten aufnahm. Damit konnte ein detailliertes Profil der Atmosphäre gewonnen werden, und auch die Staubzusammensetzung konnte genauer analysiert werden.[38]
Während des globalen Staubsturms im Jahr 2007 konnte dessen Ausbreitung von den Orbitern genau verfolgt werden, um Hinweise auf die zu erwartende Verschlechterung der Sonneneinstrahlung für die Rover am Boden zu geben. Die Kommunikation geschieht meistens über den Mars Odyssey Orbiter; es kann jedoch auch über den Mars Reconnaissance Orbiter und über den europäischen Orbiter Mars Express kommuniziert werden.[39]
Namensgebung
Die Namen der beiden Rover wurden durch einen Schülerwettbewerb ermittelt. Es siegte der Beitrag von Sofi Collis, einer neunjährigen russisch-amerikanischen Schülerin aus Arizona.
I used to live in an orphanage. It was dark and cold and lonely. At night, I looked up at the sparkly sky and felt better. I dreamed I could fly there. In America, I can make all my dreams come true. Thank you for the ‘Spirit’ and the ‘Opportunity’.
„Ich lebte einst in einem Waisenhaus. Es war dunkel und kalt und einsam. Während der Nacht schaute ich in den funkelnden Himmel und fühlte mich besser. Ich träumte, ich könnte dorthin fliegen. In Amerika kann ich alle meine Träume wahr machen. Danke für die Aufbruchsstimmung und die Gelegenheit.“
Während der Entwicklung der Rover wurden diese als MER-1 (Opportunity) und MER-2 (Spirit) bezeichnet. Intern bezeichnet die NASA sie als MER-A (Spirit) und MER-B (Opportunity), in der Reihenfolge der Landung auf dem Mars.
Medienecho
Bereits während der Planungsphase bis in die Primärmission hinein wurde die Mission von einem Filmteam begleitet. Daraus entstand der IMAX-Film „Roving Mars“.
Die Bilder waren kurz nach der Übertragung über das Internet frei und unbearbeitet verfügbar. Im Monat nach Spirits Landung zählte die NASA-Webseite 6,34 Milliarden Zugriffe, und 914 Millionen Webseiten wurden heruntergeladen. Insgesamt sahen 48.000 Menschen die NASA-Internetübertragung von Spirits Landung.[40] Dazu bildete sich eine Internetfangemeinde, welche diese regelmäßig aufarbeitete und daraus Farbbilder oder Panoramafotos generierte. Zudem wurde die Mission mit eigenen Blogs und Webseiten begleitet. Auch die Planungssoftware SAP war in einer eigenen Version namens Maestro frei verfügbar.[41]
Die Zeitschrift Science hatte die Entdeckung, dass einmal salziges, säurehaltiges Wasser auf der Marsoberfläche existiert hat, als „Breakthrough Of The Year 2004“ ausgezeichnet.[42] Das gesamte Missionsteam wurde 2007 mit dem Sir Arthur Clarke Award ausgezeichnet.[43]
2008 (deutsche Fassung: 2009) entstand die N24-Dokumentation Fünf Jahre auf dem Mars, die über die Aktivitäten der beiden Rover während ihrer ersten vier Jahre berichtet.
Wissenschaftliche Ergebnisse
Eine ausführlichere Beschreibung der Ergebnisse findet sich auf der Seite Wissenschaftliche Ergebnisse der Mars Exploration Rover Mission.
Geologische Untersuchungen
Die Rover haben wichtige Hinweise geliefert, um die primären wissenschaftlichen Ziele zu bestätigen: Suche und Charakterisierung unterschiedlicher Steine und Böden, die Hinweise auf ehemaligen Einfluss von Wasser zeigen. Insbesondere die Untersuchungen in Meridiani-Planum von Opportunity brachten viele Hinweise, dass Wasser in der Geschichte des Mars eine Rolle gespielt hat.[44] In der Umgebung von Opportunitys Landegebiet konnten erstmals sogenannte Spherules entdeckt werden, die als kleine Kügelchen ganze Flächen bedecken und aus Hämatit bestehen, welches sich meist in Wasser bildet. Auch mit Spirit konnten Steine gefunden werden, die durch Wassereinfluss verändert wurden. Zum Beispiel wurde in der Gesteinsformation Clovis durch das Mößbauer-Spektrometer das Mineral Goethit gefunden, welches sich nur in Wasser bildet. In der Gegend der Home Plate hatte Spirit den Boden aufgeschürft und dort weißen Sand gefunden, der zu 90 % aus Silikaten besteht. Solche Ablagerungen bilden sich aus Böden in Verbindung mit heißem Dampf auf vulkanischer Aktivität oder es bildet sich aus Wasser aus heißen Quellen.[45]
Bei der Untersuchung des Steins Bounce Rock von Opportunity zeigte sich, dass dessen Zusammensetzung stark von den bisher untersuchten Gesteinen abweicht, jedoch eine starke Ähnlichkeit zu den Shergottiten, einer Untergruppe der Marsmeteoriten, aufweist. Dies ist ein weiteres starkes Indiz dafür, dass die Marsmeteorite auch wirklich vom Mars herstammen.[46][47]
Atmosphärische Beobachtungen
Spirit konnte Staubteufel in Aktion fotografieren, die häufig im Gusev-Krater vorkommen. Regelmäßig wird der Himmel fotografiert, um die Entstehung von hohen Schleierwolken zu beobachten und die Durchsichtigkeit der Atmosphäre zu bestimmen. Während des globalen Staubsturms konnten die beiden Rover in Kombination mit den Mars-Orbitern den Anstieg und das Absinken des Staubgehalts der Atmosphäre beobachten. Weiterhin wurde durch gleichzeitige Messungen von Opportunity in Kombination mit dem Mars Global Surveyor ein detailliertes Temperaturprofil der marsianischen Atmosphäre erstellt.
Astronomische Beobachtungen
Die Rover führten astronomische Beobachtungen durch. Zum Beispiel wurde der Durchgang der Marsmonde vor der Sonne beobachtet, um bessere Bahnbestimmungen für diese zu erhalten[48] und das Sternbild Orion wurde aufgenommen, um die Kamera für zukünftige Nachtbeobachtungen zu testen. Es wurden auch andere Planeten beobachtet, wie Jupiter (Sol 681–694, Opportunity) oder die Erde.[49]
Weblinks
- Mars Exploration Rover Webseite der NASA (englisch)
- Artikelsammlung von der Planetary Society (englisch)
- Artikelsammlung von Astronews.com
- Mars Exploration Rover
- Zusammenstellung der wichtigsten wissenschaftlichen Resultate (NASA) (englisch)
- scinexx.de: Tausend Tage Mars - Die Mission Mars Exploration Rover 26. August 2005
Einzelnachweise
- Jim Bell: Postkarten vom Mars: Der erste Fotograf auf dem Roten Planeten. Hrsg.: Spektrum Akademischer Verlag. 1. Auflage. 2007, ISBN 978-3-8274-1969-9, S. 10–18.
- Steven W. Squyres: Roving Mars. Hrsg.: Hyperion. 1. Auflage. 2005, ISBN 1-4013-0149-5.
- The scientific objectives of the Mars Exploration Rover. NASA, 12. Juli 2007, abgerufen am 19. September 2008.
- Golombek, M. P., et al.: Selection of the Mars Exploration Rover landing sites. In: J. Geophys. Res. Vol. 108, E12, 10. Dezember 2003 (mars.asu.edu [PDF; abgerufen am 19. September 2008]).
- NASA (Hrsg.): Mars Exploration Rover Launches. Press Kit. Juni 2003 (marsrover.nasa.gov [PDF; abgerufen am 23. September 2008]).
- Spacecraft: Cruise Configuration. NASA/JPL, 5. Oktober 2005, abgerufen am 19. September 2008.
- Spacecraft: Aeroshell. NASA/JPL, 5. Oktober 2005, abgerufen am 19. September 2008.
- Allen Witkowski, Robin Bruno: Mars Exploration Rover Parachute Decelerator System Program Overview. (PDF; 2,9 MB) (Nicht mehr online verfügbar.) American Institute of Aeronautics and Astronautics, archiviert vom Original am 1. Mai 2009; abgerufen am 19. September 2008.
- Mission Fantastic to Mars (Part 3). NASA/JPL, 26. August 2006, abgerufen am 19. September 2008.
- Spacecraft: Airbags. NASA/JPL, 12. Juli 2007, abgerufen am 23. September 2008.
- In-situ Exploration and Sample Return: Entry, Descent, and Landing. NASA/JPL, 12. Juli 2007, abgerufen am 23. September 2008.
- Spacecraft: Lander. NASA/JPL, 12. Juli 2007, abgerufen am 23. September 2008.
- Spirit Lands On Mars and Sends Postcards. NASA/JPL, 4. Januar 2004, abgerufen am 23. September 2008.
- NASA Hears From Opportunity Rover On Mars. NASA/JPL, 25. Januar 2004, abgerufen am 23. September 2008.
- Step-by-Step Guide to Entry, Descent, and Landing. NASA/JPL, 12. Juli 2007, abgerufen am 30. September 2008.
- Mars Exploration Rover Landings. Januar 2004 (nasa.gov [PDF; abgerufen am 30. September 2008]).
- Once again, NASA relies on maxon technology. 2017, abgerufen am 14. Februar 2019.
- Spacecraft: Surface Operations: Rover. NASA, 2004, abgerufen am 23. September 2008.
- Technologies of Broad Benefit: Avionics. NASA, 2004, abgerufen am 23. September 2008.
- sol 408–414, March 31, 2005: Opportunity Continues to Set Martian Records. NASA, 2004, abgerufen am 23. September 2008.
- International Interplanetary Networking Succeeds. NASA, 13. Februar 2004, abgerufen am 30. September 2008.
- Opportunity All 2007, sol 1343–1348. NASA, 13. November 2007, abgerufen am 30. September 2008.
- Communications With Earth. NASA, 12. Juli 2007, abgerufen am 30. September 2008.
- Spacecraft: Surface Operations: Rover. NASA, 2003, abgerufen am 28. November 2020 (englisch).
- Technologies of Broad Benefit: Avionics. NASA/JPL, abgerufen am 23. September 2008.
- A Conversation with Mike Deliman. acm.org, 2004, abgerufen am 23. September 2008.
- Technologies of Broad Benefit: Software Engineering. NASA/JPL, abgerufen am 23. September 2008.
- Spacecraft: Nasa lässt Mars-Roboter im Sand stecken. NZZ, 27. Januar 2010, abgerufen am 18. Januar 2010.
- „NASA Mars Rover Arrives at New Site on Martian Surface“ vom 10. August 2011 auf nasa.gov, abgerufen am 8. August 2012.
- „At Mars Crater, NASA Rover Finds Evidence of Ancient Water Hotspot“ vom 1. September 2011 auf space.com, abgerufen am 8. August 2012.
- Nasa gibt Mars-Rover „Opportunity“ auf. Spiegel Online, 13. Februar 2019, abgerufen am selben Tage.
- Mission to Mars, WORKING CRUISE. NASA/JPL, September 2003, abgerufen am 30. September 2008.
- Mars Exploration Rover Operations with the Science Activity Planer. (PDF; 1,8 MB) (Nicht mehr online verfügbar.) NASA/JPL, archiviert vom Original am 27. Mai 2010; abgerufen am 16. April 2013.
- Week In Review July 3 – July 9. NASA/JPL, abgerufen am 24. September 2008.
- Mark W. Maimone and P. Chris Leger and Jeffrey J. Biesiadecki: Overview of the Mars Exploration Rovers' Autonomous Mobility and Vision Capabilities. In: IEEE International Conference on Robotics and Automation (ICRA) Space Robotics Workshop. 14. April 2007 (www-robotics.jpl.nasa.gov [PDF; abgerufen am 27. September 2008]).
- Budget Cuts Could Shut Down Mars Rover. space.com, 2006, abgerufen am 24. März 2008.
- MGS MOC Images of Mars Exploration Rover, Opportunity, on Mars. NASA, 9. Februar 2004, abgerufen am 28. September 2008.
- Constraints on dust aerosols from the Mars Exploration Rovers using MGS overflights and Mini-TES. NASA, 2. Juli 2006, abgerufen am 28. September 2008.
- International Interplanetary Networking Succeeds. NASA, 13. Februar 2004, abgerufen am 28. September 2008.
- NASA Portal Makes A Little Bit Of Mars Available To Everyone On Earth. NASA, 19. Februar 2004, abgerufen am 28. September 2008.
- New Mars Data for Maestro: Opportunity #1. SpaceRef, 13. Februar 2004, abgerufen am 23. April 2013 (englisch).
- Science's Breakthrough Of The Year: Salty, Acidic Soup Could Have Supported Life On Mars. Science, 2004, abgerufen am 25. September 2008.
- The Sir Arthur Clarke Awards – Recognising UK achievements in Space. (Nicht mehr online verfügbar.) 2007, archiviert vom Original am 9. Mai 2008; abgerufen am 25. September 2008.
- Opportunity Rover Finds Strong Evidence Meridiani Planum Was Wet. ESA, 2. März 2004, abgerufen am 30. September 2008.
- Silica-Rich Soil Found by Spirit. ESA, 21. Mai 2007, abgerufen am 30. September 2008.
- Week in Review April 10 – April 16. ESA, April 2004, abgerufen am 30. September 2008.
- „Marsmeteorite“ stammen tatsächlich vom Mars. ESA, 15. April 2004, abgerufen am 30. September 2008.
- J. F. Bell II, u. a.: Solar Eclipses of Phobos and Deimos Observed from the Surface of Mars. In: Nature. Vol. 436, Juli 2005, S. 55–57.
- Press Release Images: Spirit. NASA/JPL, 11. März 2004, abgerufen am 30. September 2008.

„Mars“-Raumsonden (1960–1973) | Mariner 3,4,6–9 (1964–1971) | Zond 2 (1964) | Viking 1,2 (1975) | Fobos 1,2 (1988) | Mars Observer (1993) | Mars Global Surveyor (1996) | Mars 96 (1996) | Mars Pathfinder mit Sojourner (1996) | Nozomi (1998) | Mars Climate Orbiter (1998) | Mars Polar Lander mit Deep Space 2 (1999) | 2001 Mars Odyssey (2001) | Mars Express mit Beagle 2 (2003) | Mars Exploration Rover mit Spirit (2003) und Opportunity (2003) | Mars Reconnaissance Orbiter (2005) | Phoenix (2007) | Phobos-Grunt (2011) | Yinghuo-1 (2011) | Curiosity (2011) | Mars Orbiter Mission (2013) | MAVEN (2013) | ExoMars Trace Gas Orbiter (2016) | Schiaparelli (2016) | InSight (2018) | al-Amal (2020) | Tianwen-1 mit Zhurong (2020) | Perseverance mit Ingenuity (2020)
Geplante Missionen
ExoMars Rover (2022) |
Martian Moons Exploration (2024)
Kursiv geschriebene Missionen sind aktiv.
Gestrichene Missionen: Mars Surveyor 2001 | Mars Telecommunications Orbiter | Mars Science and Telecommunications Orbiter | P5A | Red Dragon
(Siehe auch: Liste von künstlichen Objekten auf dem Mars | Chronologie der Marsmissionen)