Tianwen-1
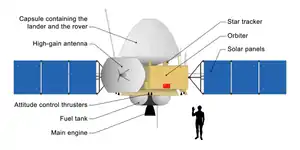
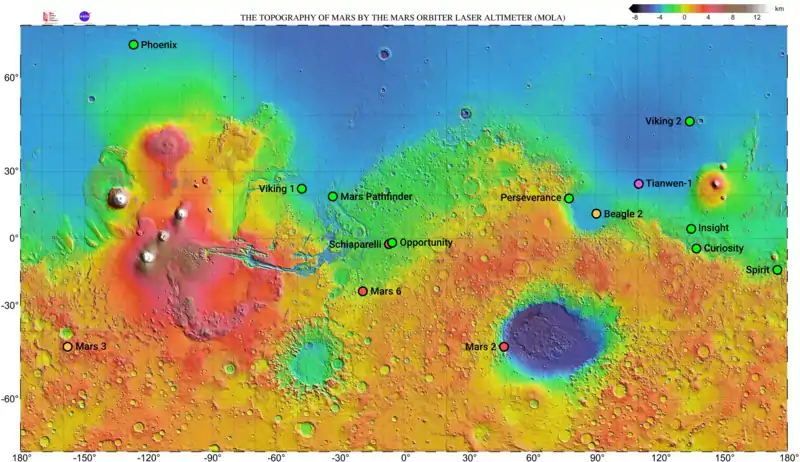
Tianwen-1 (chinesisch 天問一號 / 天问一号, Pinyin Tiānwèn Yīhào – „Himmelsfrage 1“)[1][2] ist nach Yinghuo-1 die zweite von der Volksrepublik China gebaute Marssonde. Sie besteht aus einem Orbiter, einem Landegerät und einem Rover. Die Sonde wurde am 23. Juli 2020 mit einer Trägerrakete vom Typ Langer Marsch 5 gestartet und erreichte am 10. Februar 2021 als erste chinesische Marssonde eine Umlaufbahn um den Planeten.[3] Der Rover Zhurong landete am 14. Mai 2021 um 23:18 Uhr UTC in der Utopia Planitia,[4] wo er seit 280 Sol aktiv ist.
| Tianwen-1 | |||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
 | |||||||||||||||||||
| NSSDC ID | 2020-049A | ||||||||||||||||||
| Missionsziel | Marsforschung | ||||||||||||||||||
| Auftraggeber | Nationale Raumfahrtbehörde Chinas | ||||||||||||||||||
| Trägerrakete | Langer Marsch 5 | ||||||||||||||||||
| Aufbau | |||||||||||||||||||
| Startmasse | ca. 5000 kg | ||||||||||||||||||
| Verlauf der Mission | |||||||||||||||||||
| Startdatum | 23. Juli 2020, 04:41 UTC | ||||||||||||||||||
| Startrampe | Kosmodrom Wenchang | ||||||||||||||||||
| |||||||||||||||||||
Name
Der Name bezieht sich auf ein Qu Yuan (340–278 v. Chr.) zugeschriebenes Gedicht,[5] in dem dieser die damalige Astronomie hinterfragte, wie sie auf Wandgemälden in den Ahnentempeln der Chu-Könige dargestellt war: „Warum ist die Ekliptik in 12 Abschnitte eingeteilt?“ Qu Yuan stellte sich Fragen betreffs des Himmels. Im Originalgedicht bleiben die Fragen ohne Antworten;[6][7] Tianwen-1 und ihre Nachfolgesonden sollen nun Antworten finden.[8][9]
Stellung innerhalb des Marsprogramms
Erste Vorgespräche für das Marsprogramm der Volksrepublik China gab es im Juni 2005. Der offizielle Start des Programms fand am 26. März 2007 mit der Unterzeichnung eines Partnerschaftsvertrags zwischen der China National Space Administration und der staatlichen russischen Raumfahrtorganisation Roskosmos statt. Das erste Ziel des Marsprogramms war die Entwicklung und der Bau eines Mars-Orbiters. Die russische Raumsonde Phobos-Grunt, die den chinesischen Orbiter Yinghuo-1 mitführte, kam jedoch nach dem Start am 9. November 2011 nicht über einen Parkorbit hinaus und verglühte am 15. Januar 2012 zusammen mit Yinghuo-1 über dem Ostpazifik. In der Folge begann China ein eigenes Mars-Projekt.[10]
Yinghuo-1 sollte die Marsoberfläche fotografieren, um geeignete Orte für eine spätere Landung ausfindig zu machen. Abgesehen davon hatten Wu Ji, der Chefwissenschaftler bei Yinghuo-1, und Wang Chi, der für die Nutzlasten der Sonde zuständig war, die Mission primär auf eine Erforschung der Mars-Ionosphäre ausgelegt. Diese beiden Aufgaben von Yinghuo-1 übernahm beziehungsweise übernimmt nun der Orbiter von Tianwen-1. Zur Vorbereitung der Roverlandung kartografierte er drei Monate lang die Marsoberfläche. Chefwissenschaftler und Ionosphärenspezialist Wan Weixing stellte die Nutzlasten für die Beobachtung des Weltraumwetters des Mars zusammen.
Planung, Entwicklung und Bau der Komponenten
Tianwen-1 wurde wie die Sonden des Mondprogramms von der Chinesischen Akademie für Weltraumtechnologie gebaut, wobei die Shanghaier Akademie für Raumfahrttechnologie den Orbiter beisteuerte.[11] Die wissenschaftlichen Nutzlasten (Instrumente) wurden unter Aufsicht des Nationalen Zentrums für Weltraumwissenschaften der Akademie der Wissenschaften in Peking entwickelt. Neben ihrer wissenschaftlichen Aufgabe dient die Marsmission auch der Erprobung neuer Technologie, die benötigt wird, um in den 2030er Jahren Marsproben zurück zur Erde zu bringen.
Die Sonde wog beim Start insgesamt ungefähr 5 t, davon entfielen 3175 kg auf den betankten Orbiter.[12] Der Lander wog zusammen mit dem Rover ohne den Hitzeschild 1285 kg.[13][14]
Orbiter
Nachdem Premierminister Li Keqiang das Projekt am 11. Januar 2016 genehmigt hatte und die Aufgaben verteilt worden waren, begannen die Ingenieure in Shanghai unter der Leitung von Zhang Yuhua (张玉花, * 1968)[15][16] mit der Konstruktion des Orbiters. Man wählte hierfür die Form einer dicken sechseckigen Münze mit einem Loch in der Mitte, wobei die Innenwand der Öffnung, über die der Druck beim Start und während der Bahnregelungsmanöver auf den Lander übertragen wird, nach ersten Versuchen nicht röhren- sondern konusförmig, auf den Lander hin zulaufend gestaltet wurde. Tests ergaben, dass auf diese Art bei gleichem Gewicht die Tragkraft der Konstruktion auf 130 % der Anforderungen stieg. Im breiten Ende der Öffnung befinden sich kugelförmige Treibstofftanks und das Haupttriebwerk, zwischen dem Tragkonus und der sechseckigen Außenwand die elektronischen Systeme und die von ausklappbaren Solarmodulen gespeisten Akkumulatoren.
Ein erster Prototyp wurde gebaut und mit an der Außenwand montierter Parabolantenne (horizontaler Durchmesser 2,5 m)[17] sowie ausgeklappten Solarzellenflügeln (Spannweite 13,6 m)[18] Stoß- und Temperaturtests unterzogen. Nachdem diese Tests zur Zufriedenheit ausgefallen waren, wurde 2018 ein mit der endgültigen Version identischer Prototyp gebaut, an dem die Elektronik getestet wurde, vor allem auf elektromagnetische Verträglichkeit, aber auch auf das Funktionieren der Schnittstellen für die Kommunikation des Orbiters mit der Trägerrakete, dem Rover und den Bodenstationen. Dann wurde der für die Mission bestimmte Orbiter gebaut und mit der Lander-Rover-Gruppe integriert.[19] Das Fluxgate-Magnetometer an Bord des Orbiters wurde von Wissenschaftlern der Chinesischen Universität für Wissenschaft und Technik in Hefei gemeinsam mit Kolleginnen und Kollegen vom Institut für Weltraumforschung der Österreichischen Akademie der Wissenschaften in Graz gebaut.[20][21][22]
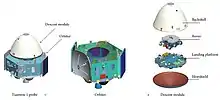
Lander
Der Lander benutzte für den Abstieg einen Fallschirm, hauptsächlich aber ein regelbares Bremstriebwerk mit 7,5 kN Schubkraft,[23][24] dasselbe, ab 2008 entwickelte YF-36A, das seit Chang’e 3 (2013) bei allen chinesischen Landern zum Einsatz kam.[25] Die Bodenplatte des Hitzeschilds hatte einen Durchmesser von 3,4 m. Der ablative Hitzeschild war ähnlich demjenigen der Landekapsel der Shenzhou-Raumschiffe ausgelegt, wurde aber mit einer Bienenwabenstruktur verstärkt. Für Tianwen-1 wurde die Rezeptur des Materials so geändert, dass es einerseits kräftiger wurde, andererseits aber auch eine geringere Dichte besaß, also leichter wurde. Außerdem wurde das stützende Bienenwabengitter an den stark gekrümmten Stellen, sozusagen den „Kanten“ der Bodenplatte, verstärkt, um sie angesichts der dort angreifenden aerodynamischen Kräfte formstabil zu halten. Die insgesamt 70.000 Wabenlöcher wurden bei der Herstellung der Bodenplatte mit dem Material ausgegossen. Der obere, um 20° nach innen geneigte Teil des Hitzeschilds[26] bestand dagegen aus einem nicht-ablativen kohlenstofffaserverstärkten Kunststoff von mittlerer Dichte, hoher Festigkeit und hoher Wärmeisolation. Darauf war wiederum eine ablative Farbschicht aufgetragen, die nicht nur dem Hitzeschutz diente, sondern den Lander auch vor den klimatischen Einflüssen auf dem Kosmodrom Wenchang mit seiner salzhaltigen Luft und vor Materialverlust durch Ausgasen im Vakuum schützte.[27]
Im April 2019 war man in die Systemintegrationsphase eingetreten und hatte unter der Aufsicht von Sun Zezhou, dem Chefkonstrukteur der Sonde, mit ersten Tests der Lander-Rover-Kombination begonnen.[28][29] Am 12. Oktober 2019 wurde das erste Foto veröffentlicht, das den Orbiter zeigt, auf dem die Lander-Rover-Kombination montiert ist, welche vom Hitzeschild umgeben ist.[30] Am 14. November 2019 fand auf dem Mehrzweck-Versuchsgelände für Landungen auf fremden Himmelskörpern des Forschungsinstituts für weltraumbezogenen Maschinenbau und Elektrotechnik eine öffentliche Vorführung des Landeablaufs statt, zu dem die Nationale Raumfahrtbehörde etwa 70 Diplomaten und Journalisten aus Ländern eingeladen hatte, mit denen China in der Vergangenheit bei Raumfahrtprojekten zusammengearbeitet hatte (u. a. Deutschland, Holland, Italien, Brasilien, Argentinien, Saudi-Arabien). Mit einer Seilkonstruktion wurde die im Vergleich zur Erde nur ein Drittel betragende Schwerkraft des Mars simuliert. Der Lander reduzierte zuerst seine Geschwindigkeit auf Null, suchte sich zwischen den auf dem Testgelände verteilten Felsbrockenimitaten einen freien Fleck und senkte sich dann dort ab.[31][32]
Am 10. April 2020 traf eine Gruppe von Dozenten und Studenten der Fakultät für Raumfahrttechnik der Universität für Luft- und Raumfahrt Nanjing auf dem Kosmodrom Wenchang ein, um die von ihnen konstruierte Notfallbake an der realen Sonde zu überprüfen.[33] Bei diesem hinten auf der Unterseite der Landerplattform angebrachten Gerät (das runde, bronzefarbene Teil im nebenstehenden Bild) handelte es sich um eine Art Flugschreiber, der im Falle einer unplanmäßig abgelaufenen Landung ein Signal aussenden und aufgezeichnete Daten zur Erde funken sollte.[34]
Rover
Der Rover ist 2 × 1,65 × 0,8 Meter groß und mit 240 kg fast doppelt so schwer wie der chinesische Mondrover Jadehase 2. Während auf dem Mond nur ein Sechstel der irdischen Schwerkraft herrscht, liegt dieser Wert auf dem Mars bei etwa einem Drittel. Der Marsrover muss daher robuster gebaut sein und benötigt stärkere Motoren als der Mondrover. Da die nächtlichen Temperaturen auf dem Mars in Äquatornähe mit −85 °C deutlich milder sind als auf dem Mond (bis −180 °C), besitzt der Marsrover kein Radionuklid-Heizelement, sondern bezieht seine Energie über Solarzellen, ergänzt durch zwei chemische Wärmflaschen.[35]
Missionsziele
Technische Ziele
- Einschwenken in eine Marsumlaufbahn, Abstieg durch die Marsatmosphäre, Landung
- Über einen längeren Zeitraum autonom agierender Orbiter und Lander
- Steuerung und Datenempfang über eine Entfernung von 400 Millionen Kilometer
- Erfahrungssammlung für die Entwicklung von Systemen für autonom agierende Tiefraumsonden
Wissenschaftliche Ziele
- Erforschung der Topographie und geologischen Zusammensetzung des Mars: Erstellung von hochauflösenden Karten ausgewählter Gebiete; Erforschung von Entstehungsursachen und Evolution der geologischen Zusammensetzung des Mars.
- Erforschung der Eigenschaften des Marsregolith sowie die Verteilung von Wassereis darin: Messung der mineralogischen Zusammensetzung des Marsregolith, von Verwitterung und Sedimentation sowie des Auftretens dieser Eigenheiten über den gesamten Mars; Suche nach Wassereis; Erforschung der Schichtstruktur des Marsregolith.
- Erforschung der Zusammensetzung des Oberflächenmaterials: Identifizierung der Gesteinsarten auf der Marsoberfläche; Erkundung von sekundären Erzlagerstätten, also magmatischen Erzlagerstätten, die durch Hebung an die Marsoberfläche gelangten; Bestimmung des Mineralgehalts der Erze auf der Marsoberfläche.
- Erforschung von Ionosphäre, Weltraumwetter und Oberflächenwetter des Mars: Messung von Temperatur, Luftdruck und Windsystemen auf der Oberfläche; Erforschung der Ionosphärenstruktur sowie der jahreszeitlichen Veränderungen des Marswetters.
- Erforschung der inneren Struktur des Mars: Messung des Magnetfelds; Erforschung der geologischen Frühgeschichte des Mars, der Verteilung der verschiedenen Gesteinsarten im Inneren des Planeten sowie Messung seines Schwerefeldes.[36][37]
Der Planetengeologe Ernst Hauber vom Deutschen Zentrum für Luft- und Raumfahrt kritisierte, dass es nicht beabsichtigt ist, die von der Sonde gesammelten Daten frei der wissenschaftlichen Öffentlichkeit zur Verfügung zu stellen, wie es bei der ESA üblich ist, sondern dass sie zunächst von der Nationalen Behörde für Wissenschaft, Technik und Industrie in der Landesverteidigung unter Verschluss gehalten werden.[38] Es gibt beim Bodensegment des Marsprogramms der Volksrepublik China drei Stufen der Zugangsberechtigung: Die Rohdaten werden prinzipiell nur an die Hersteller der Instrumente weitergegeben, damit diese ihre Geräte verbessern können. Aus den Rohdaten erstellte Tabellen, Bilder und Grafiken werden registrierten Nutzern zur Verfügung gestellt, die wiederum in einen „Inneren Kreis“ (内部用户, Nèibù Yònghù) und „Außenstehende“ (外部用户, Wàibù Yònghù) unterteilt sind.[39] Stand 12. Juni 2021, einen Monat nach der Landung des Rovers, wurden Rohdaten bereits an Institute in Österreich, Frankreich und Russland übermittelt, mit denen bei Entwicklung und Bau der Sonde eine Zusammenarbeit bestand.[40] Mitte August 2021 waren die ersten Daten dann zu Tabellen etc. aufbereitet, chinesische Forschergruppen konnten Antrag auf Dateneinsicht stellen. Weitere Daten wurden von da an in monatlichen Abständen veröffentlicht.[41] Im September 2021 waren 200 GB an Daten von der topografischen Kamera, der Wetterstation, dem Bodenradar und dem Laser-Spektrometer des Rovers veröffentlicht.[42]
Wissenschaftliche Instrumente
Orbiter
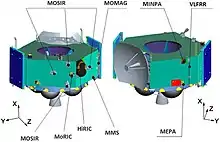
- Kamera mit Weitwinkelobjektiv und mittlerer Auflösung (MoRIC): 100 m pro Pixel über eine Breite von 400 km bei einer Höhe von 400 km; rot, grün, blau.[43]
- Panchromatische Kamera mit hoher Auflösung (HiRIC): 2,5 m (im Fokus 0,5 m) pro Pixel, Farbaufnahmen: 10 m (im Fokus 2 m) pro Pixel über eine Breite von 9 km bei einer Höhe von 265 km.
- Bodenradar (MOSIR) mit zwei Paaren von Antennen von jeweils 5 m Länge für den Frequenzbereich von 10–20 MHz bzw. 30–50 MHz mit einer Sendeleistung von 100 W zur Erforschung von unterirdischen Strukturen, bei Sand bis in eine Tiefe von einigen hundert Metern, bei den Eiskappen bis in eine Tiefe von einigen Kilometern, mit einer vertikalen Auflösung von 1 m und einer horizontalen Auflösung von 10 m.[44] Außerdem steht ein Niederfrequenzempfänger (VLFRR) für den Bereich zwischen 10 kHz und 10 MHz mit einer Auflösung von 1 kHz im Bereich 10–500 kHz und 20 kHz im Bereich 500 kHz – 10 MHz zur Verfügung. Der Niederfrequenzempfänger wurde für Beobachtungen während des Flugs zum Mars genutzt.
- Hyperspektraldetektor (MMS) mit 72 Kanälen für Marserze (sichtbares Licht und Nahinfrarot bzw. 0,45–3,40 μm; Auflösung 10 nm im sichtbaren Bereich, 12 nm bei 1,0–2,0 μm, 25 nm ab 2,0 μm). Die räumliche Auflösung dieses Geräts beträgt je nach Betriebsart 1,06 km – 3,2 km pro Pixel oder 265 m – 3,2 km pro Pixel.
- Marsmagnetometer (MOMAG) auf einem 3 m langen Ausleger für die Erforschung der Wechselwirkung zwischen Mars-Ionosphäre, Magnetosphäre und Sonnenwind (Messbereich: ±10.000 nT, Auflösung: 0,01 nT).
- Teilchendetektor für Ionen und neutrale Partikel (MINPA) zum Studium der Wechselwirkung zwischen Sonnenwind und Marsatmosphäre sowie der Untersuchung von deren Entweichen.[45] Gemessen werden Ionen mit einer kinetischen Energie zwischen 5 eV und 25 keV sowie neutrale Partikel zwischen 50 eV und 3 keV. Dieses Gerät kann verschiedene Ionen sowie die wichtigen neutralen Partikel Wasserstoff, Helium und Sauerstoff voneinander unterscheiden. Der MINPA wurde bereits vom 31. Oktober 2020 bis zum 25. Januar 2021, noch während des Flugs zum Mars eingeschaltet, um Regionen der Interaktion zwischen langsamem und schnellem Sonnenwind (stream interaction regions bzw. SIRs) zu beobachten.[46]
- Teilchendetektor für energetische Partikel (MEPA) zur Kartografierung von deren räumlicher Verteilung während des Flugs zum Mars und im marsnahen Raum. Gemessen werden Elektronen zwischen 0,1 MeV und 12 MeV, Protonen zwischen 2 MeV und 100 MeV sowie Schwerionen mit einer kinetischen Energie zwischen 25 MeV und 300 MeV.[18]
Rover

- Topografische Kamera (2048 × 2048 Pixel, Farbaufnahmen für Entfernungen ab 0,5 m)[47]
- Multispektralkamera (480 nm, 525 nm, 650 nm, 700 nm, 800 nm, 900 nm, 950 nm, 1000 nm, also blau bis infrarot)
- Bodenradar mit zwei Kanälen: Niederfrequenzkanal für eine Tiefe von 10–100 m mit einer Auflösung von einigen Metern sowie Hochfrequenzkanal für eine Tiefe von 3–10 m mit einer Auflösung von einigen Zentimetern[48]
- Gerät für die Messung der Zusammensetzung des Marsoberflächenmaterials mittels laserinduzierter Plasmaspektroskopie (Si, Al, Fe, Mg, Ca, Na, O, C, H, Mn, Ti, S etc.) und Infrarotspektrometer (850–2400 nm mit einer Auflösung von 12 nm)
- Gerät für die Messung des Magnetfelds auf der Marsoberfläche (Messbereich: ±2000 nT, Auflösung: 0,01 nT, temperaturstabil 0,01 nT/°C, arbeitet mit dem Magnetometer auf dem Orbiter zusammen)[49]
- Wetterstation (Temperatur: −120 °C bis +50 °C bei einer Auflösung von 0,1 °C, Luftdruck: 1–1500 Pa bei einer Auflösung von 0,1 Pa,[50] Windgeschwindigkeit: 0–70 m/s bei einer Auflösung von 0,1 m/s, Windrichtung: 0°–360° bei einer Auflösung von 5°, Mikrofon: 20 Hz–20 kHz mit einer Empfindlichkeit von 50 mV/Pa)[51]
Um nach der damals für den Frühsommer 2021 geplanten Landung möglichst schnell zu Ergebnissen zu kommen, begann das Zentrum für Monderkundungs- und Raumfahrt-Projekte der Nationalen Raumfahrtbehörde Anfang Juli 2019 unter der Leitung des Elektroingenieurs Jie Degang (节德刚, * 1978),[52] eine Gruppe von Wissenschaftlern zusammenzustellen, die sich bereits im Vorfeld mit den Instrumenten der Sonde vertraut machen sollten, um über konkrete Forschungsprojekte nachzudenken und die Daten nach Erhalt sofort nutzbar zu machen. Zielgruppe der Anwerbekampagne waren junge Wissenschaftler von chinesischen Hochschulen und Forschungsinstituten; Ausländer waren nicht teilnahmeberechtigt.[53]
Missionsablauf
Start und Transferbahn
.jpg.webp)
Als Trägerrakete für die Sonde fungierte eine Changzheng 5. Zwischen dem 23. Juli und dem 5. August 2020 gab es täglich ein Startfenster von jeweils 30 Minuten. Da sich Erde und Mars während dieser Zeitspanne relativ zueinander bewegten, erforderte dies alle zehn Minuten eine etwas andere Bahn. Es gab also insgesamt 42 mögliche Flugbahnen. Diese wurden in die Raketensteuerung einprogrammiert und die Rakete wählte die zum Startzeitpunkt passende Flugbahn.
Der Start der 5 t schweren Sonde erfolgte am 23. Juli 2020 um 04:41 Uhr UTC. Etwa drei Minuten nach dem Start trennten sich die vier Kerosin-Flüssigsauerstoff-Booster von der zweistufigen Trägerrakete ab. Sechs Minuten nach dem Start befand sich die Rakete außerhalb der Atmosphäre und die Nutzlastverkleidung wurde geöffnet und abgeworfen. Acht Minuten nach dem Start wurde die erste Stufe abgetrennt und die Oberstufe zündete ihre beiden Triebwerke. Nach weiteren dreieinhalb Minuten wurden die Triebwerke abgeschaltet und die Rakete ging für etwa 16 Minuten in einen antriebslosen Flug über, eine Technik, die am 27. Dezember 2019 beim dritten Flug dieses Raketentyps erprobt worden war. Die Triebwerke wurden danach erneut für 7 Minuten gezündet und die Bahn wurde korrigiert. 36 Minuten nach dem Start hatte die Rakete rund 10.000 km zurückgelegt und die geplante Transferbahn zum Mars in 200 km Höhe erreicht.[54][55] Die Sonde wurde von der Oberstufe der Rakete abgetrennt und flog mit einer Geschwindigkeit von 11,5 km/s (etwas mehr als die an sich nötige Fluchtgeschwindigkeit von 11,2 km/s) antriebslos weiter in Richtung Mars.[56][57] Hierfür wurde eine sogenannte „Hohmann-Bahn“ gewählt, die nur alle 26 Monate einmal für dreieinhalb Wochen möglich ist, aber beim Start weniger Treibstoff erfordert bzw. ein höheres Nutzlastgewicht ermöglicht.[13]

Um 05:21 Uhr UTC erfasste zuerst die Tiefraumstation Zapala in Argentinien (eine Außenstelle des Satellitenkontrollzentrums Xi’an) die Sonde. Um 13:37 Uhr folgte die Tiefraumstation Giyamusi und kurz nach 17 Uhr die Tiefraumstation Kashgar. Mittels Langbasisinterferometrie konnte von den drei Stationen bestätigt werden, dass sich die Sonde auf der korrekten Bahn befand.[58] Am 1. August 2020 um 23:00 Uhr UTC – nach 230 Stunden Flug bzw. 3 Millionen zurückgelegten Kilometern – erfolgte plangemäß ein erstes Bahnkorrekturmanöver. Das ursprünglich für die Mondsonde Chang’e 5 entwickelte Haupttriebwerk des Orbiters[59] mit einer Schubkraft von 3 kN wurde dazu 20 Sekunden lang in Betrieb gesetzt. Neben der Regulierung von Richtung und Geschwindigkeit diente dies vor allem auch dazu, Daten über das Verhalten des Triebwerks zu sammeln, die in die Berechnungen für weitere Bahnmanöver mit einflossen.[60] Das zweite Bahnkorrekturmanöver fand am 20. September 2020 um 15:00 Uhr bzw. nach 60 Tagen Flug und nach 160 Millionen zurückgelegten Kilometern statt. Hierbei wurden vier der acht Lageregelungstriebwerke mit jeweils 120 N Schubkraft für 20 Sekunden in Betrieb gesetzt. Neben einer kleinen Bahnkorrektur diente auch dieses Manöver primär dem Test der Triebwerke.[61]
Für eine Sichtkontrolle der Sonde während des Flugs hatte die für die Konstruktion des Orbiters zuständige Shanghaier Akademie für Raumfahrttechnologie ein System entwickelt, bei dem eine kleine Kamera von insgesamt 950 g mit niedrigem Kraftstoß ausgeworfen wird (die eigentliche Kamera wiegt 680 g, der Rest ist Teil des Mechanismus), die auf Vorder- und Rückseite mit jeweils einem Weitwinkelobjektiv und einem CCD-Sensor von 800×600 bzw. 1600×1200 Pixeln ausgestattet ist. Während die Kamera, sich ständig überschlagend, in den Weiten des Weltalls entschwindet, macht sie jede Sekunde ein Foto. Die Fotos werden von der Kamera über ein WLAN mit einer Reichweite von 400 m an die Sonde geschickt. Diese wiederum funkt die Bilder zurück an das Raumfahrtkontrollzentrum Peking. Tianwen-1 verfügt über mehrere dieser Einwegkameras, die erste davon wurde am 1. Oktober 2020, dem chinesischen Nationalfeiertag, eingesetzt.[62][63]
Am 9. Oktober 2020 um 15:00 Uhr UTC fand unter Mitwirkung der Tiefraumstationen Kashgar und Giyamusi ein größeres, gut 8 Minuten dauerndes Bahnänderungsmanöver statt.[64] Eine weitere, minimale Bahnkorrektur fand am 28. Oktober 2020 um 14:00 Uhr statt. Hierbei wurden 8 der 12 Lageregelungstriebwerke von 25 N kurz gezündet, auch um ihre Funktionsfähigkeit zu überprüfen. Zu diesem Zeitpunkt, 97 Tage nach dem Start, hatte die Sonde 256 Millionen Kilometer zurückgelegt, etwa die Hälfte der geplanten Strecke.[65] Ein letztes Bahnkorrekturmanöver vor dem Einschwenken in den Marsorbit fand am 5. Februar 2021 um 12:00 Uhr UTC in einer Entfernung von 1,1 Millionen Kilometern vom Mars statt, wobei erneut 8 der 12 Lageregelungstriebwerke von 25 N Schubkraft für 12 Sekunden gezündet wurden.[66] Bereits vorher hatte die Sonde aus einer Entfernung von 2,2 Millionen Kilometern das erste Foto vom Mars aufgenommen und an das Bodensegment in Peking geschickt. Zu diesem Zeitpunkt, 197 Tage nach dem Start, hatte die Sonde auf ihrer Transferbahn 465 Millionen Kilometer zurückgelegt.[67]
Parkorbit
Am 10. Februar 2021 um 11:52 Uhr UTC zündete die Sonde für 15 Minuten ihr Haupttriebwerk und schwenkte in einen um 10° zum Äquator geneigten, hochelliptischen Orbit (Flughöhe 400–180.000 km) um den Mars ein mit einer Umlaufzeit von 10 Tagen.[3] Dies war neben der Landung eines der kritischsten Manöver der Mission. Wenn die Zündung des Triebwerks nicht genau zum richtigen Zeitpunkt erfolgt wäre, wäre die Sonde entweder auf dem Mars zerschellt oder – wie 2003 die japanische Sonde Nozomi – an dem Planeten vorbei geflogen. Je nachdem, an welcher Stelle ihrer jeweiligen Umlaufbahn um die Sonne sich Erde und Mars befinden, beträgt der Abstand zwischen den beiden Planeten 56 bis 401 Millionen Kilometer. Daraus resultiert eine Signallaufzeit für die einfache Strecke von 3,1 bis 22,3 Minuten. Am 10. Februar 2021, zum Zeitpunkt des Einschwenkens der Sonde in den Marsorbit, betrug der Abstand zwischen Erde und Mars 192 Millionen Kilometer und die Signallaufzeit 10,7 Minuten.[68]
Wegen der langen Signallaufzeit ist die direkte Steuerung einer Marssonde nicht möglich. Die Ingenieure im Raumfahrtkontrollzentrum Peking umgehen dieses Problem, indem sie den Flug der Sonde mit den Antennen des Chinesischen Tiefraum-Netzwerks über einen Zeitraum von einer Woche vor einem Bahnmanöver ständig beobachten und ihre Bahndaten (Position, Richtung, Geschwindigkeit) mithilfe des Delta-DOR-Verfahrens präzise ermitteln. Unter Einbeziehung von Faktoren wie der Anziehungskraft der diversen Himmelskörper, Ausgasen an der Sonne zugewandten Oberflächen der Sonde etc. wird ein Computermodell der voraussichtlichen weiteren Bahn erstellt und der Zeitpunkt zur Zündung des Triebwerks berechnet. Dieser wird an die Sonde gefunkt, die ihre Triebwerke dann, wenn der Zeitpunkt gekommen ist, autonom zündet.[69]
Für die Bahnmanöver besitzt der Orbiter von Tianwen-1 insgesamt 21 Triebwerke: ein Haupttriebwerk mit 3 kN Schubkraft, acht Lageregelungstriebwerke mit 120 N Schubkraft und zwölf Lageregelungstriebwerke mit 25 N Schubkraft, alle von der Akademie für Flüssigkeitsraketentriebwerkstechnik hergestellt.[70] Am 12. Februar 2021, dem Chinesischen Neujahrsfest, veröffentlichte das Zentrum für Monderkundungs- und Raumfahrt-Projekte der Nationalen Raumfahrtbehörde zwei von verschiedenen Bordkameras aufgenommene Videos des Einschwenkvorgangs.[71][72]
Am 15. Februar 2021 um 09:00 Uhr UTC zündete die Sonde ihr 3-kN-Haupttriebwerk und schwenkte aus dem fast äquatorialen Orbit in eine polare Umlaufbahn ein. Gleichzeitig wurde der Periares (niedrigste Flughöhe) auf 265 km abgesenkt.[73] Ein weiteres Bahnmanöver fand am 20. Februar statt. Am 23. Februar 2021 um 22:29 Uhr UTC führte die Sonde schließlich das finale Bahnmanöver durch, mit dem sie in den Parkorbit eintrat. Auf einer um 86,9° zum Äquator geneigten Bahn mit einer Umlaufzeit von zwei Marstagen und aus einer Höhe von 280 km am marsnächsten und 59.000 km am marsfernsten Punkt erkundete sie anschließend etwa drei Monate lang die beiden möglichen Landegebiete:[74]
- Eine Senke am südlichen Ende der Utopia Planitia bei 110,318° östlicher Länge und 24,748° nördlicher Breite, die am Ende der Hesperianischen Periode vor etwa 2 Milliarden Jahren entstand. Dies war das Primärziel.
- Eine Stelle im Südosten der Utopia Planitia, wo Lava des Vulkans Elysium Mons auf die Ebene floss. Dies war das Reserveziel.[56][75]
Nun wurden alle sieben Instrumente des Orbiters in Betrieb genommen. Die wichtigsten hierbei sind die hochauflösende Kamera, mit der die Sonde – durch den sehr niedrigen Orbit – im Fokus des Objektivs Aufnahmen mit einer Auflösung von 0,5 m pro Pixel machen kann,[3] die Weitwinkelkamera mit mittlerer Auflösung sowie das Spektrometer zur Erkundung von Bodenschätzen. Während der Beobachtungsphase aus dem Parkorbit wurde nicht nur ein Augenmerk auf die Topographie gelegt, sondern es wurden entlang des für die Landung vorgesehenen Anflugkorridors auch detaillierte Wetterbeobachtungen durchgeführt, um einen Eindruck von der Häufigkeit und Dauer von Sand- und Staubstürmen zu erhalten.[76][77] Die hochauflösende Kamera kann das Gelände sowohl zeilenweise aufnehmen (push broom) als auch punktweise abtasten (planar array bzw. whisk broom), um wichtige Gegenden und Geländeformationen von Interesse genau zu vermessen. Die Weitwinkelkamera kann ihre Belichtungszeit sowohl selbstständig einstellen, als auch von der Erde ferngesteuert werden. Sie dient primär dazu, langfristige Veränderungen im Gelände zu dokumentieren. Am 4. März 2021 veröffentlichte die Nationale Raumfahrtbehörde die ersten aus dem Parkorbit aufgenommenen Bilder.[78]
Landung
Nachdem sich die Techniker für das Primärlandegebiet im Süden der Utopia Planitia entschieden hatten,[79] zündete die Sonde am 14. Mai 2021 um etwa 17:00 Uhr UTC für gut zwei Minuten vier der acht Lageregelungstriebwerke mit jeweils 120 N Schubkraft und senkte ihren Orbit ab. Drei Stunden später, um etwa 20:00 Uhr UTC wurde die Lander-Rover-Gruppe vom Orbiter abgekoppelt. Wenn es hierbei Probleme gegeben hätte, hätte die Sonde das selbstständig erkannt und den Trennungsvorgang abgebrochen. Sie wäre als Ganzes weitergeflogen und hätte auf einen späteren Zeitpunkt zur Landung gewartet.[80] 30 Minuten nach der Trennung kehrte der Orbiter mit einem weiteren Bahnmanöver in den Parkorbit zurück.[81]
Während des Landevorgangs fand eine rasche und starke Geschwindigkeitsveränderung statt – innerhalb von neun Minuten von 4,8 km/s auf Null – was durch den Doppler-Effekt dazu führte, dass sich die Frequenz der Trägerwelle für die Telemetrie-Signale im normalerweise genutzten X-Band um bis zu 200 kHz ändert; und zwar mit einer Geschwindigkeit von bis zu 3,5 kHz/s.[82] Daher fand die Kommunikation zwischen Lander und Orbiter ab dem Zeitpunkt der Abkoppelung im Dezimeterwellen-Bereich statt, wo dieser Effekt weniger ausgeprägt ist.[80][83] Für die Stromversorgung nach dem Abtrennen vom Orbiter griff der Lander auf von der China Electronics Technology Group Corporation entwickelte Lithium-Kohlenstofffluorid-Batterien zurück, die sich während des sieben Monate währenden Flugs auch bei starker Sonnenbestrahlung wenig entluden und 5 kg weniger wogen als ein entsprechender Satz Lithium-Ionen-Akkumulatoren.[44][84]
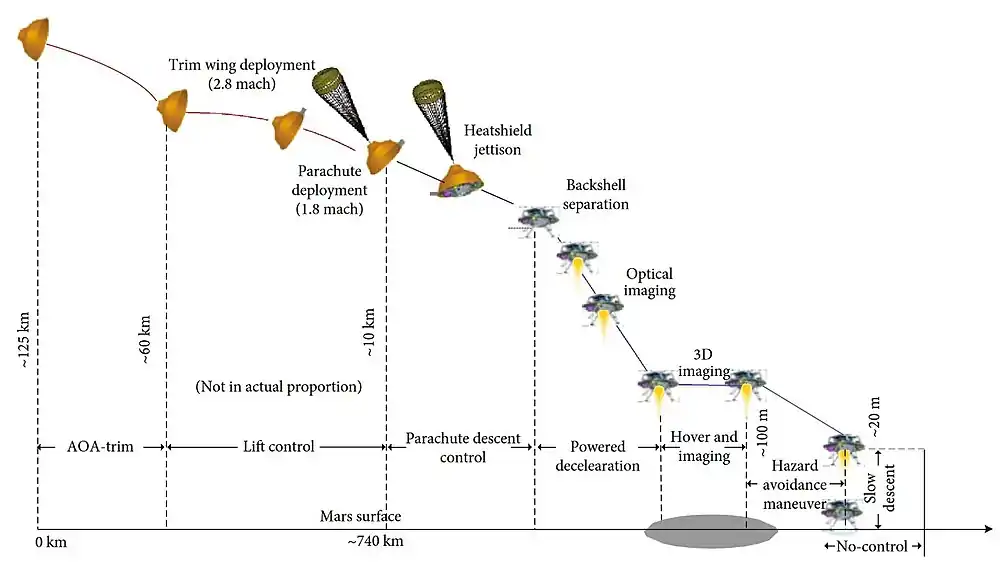
Die Lander-Rover-Gruppe trat etwa 3 Stunden nach der Trennung vom Orbiter in einer Höhe von 125 km unter einem Winkel von 11,2° in die Atmosphäre ein, wo sie zunächst für 5 Minuten alleine durch ihren Strömungswiderstand und dynamischen Auftrieb die Geschwindigkeit von 4,8 km/s (also 17.280 km/h) auf 460 m/s reduzierte.[40] Ihre Fluglage regelte die Kapsel während dieser Zeit zunächst über kleine Kaltgas-Steuertriebwerke, ab etwa 900 m/s mit einem ausgeklappten Trimmflügel.[85][86] Dann öffnete sich in einer Höhe von 4 km der Überschallfallschirm und bremste die Sonde während 90 Sekunden von 460 m/s auf 95 m/s ab. In einer Höhe von 1,5 km über der Oberfläche wurde der Fallschirm abgeworfen, das Bremstriebwerk zündete und reduzierte mit seiner Schubkraft von 7,5 kN die Fallgeschwindigkeit in weiteren 90 Sekunden auf nur noch 3,6 m/s, bei einer lateralen (seitlichen) Geschwindigkeit von maximal 0,9 m/s. 100 m über dem Boden blieb der Lander kurz in der Schwebe,[75] um sich wie bei den Mondsonden Chang’e 3 und Chang’e 4 mithilfe eines Laser-Entfernungsmessers, eines Mikrowellen-Geschwindigkeitsmessers und eines dreidimensional abbildenden Laserscanners mit einem Sichtfeld von 30° × 30° selbstständig einen ebenen und von Felsbrocken freien Platz zu suchen – zum Manövrieren verfügte der Lander über 20 kleinere Triebwerke mit jeweils 250 N Schubkraft und sechs mit 25 N –, auf den er sich dann langsam absenkte.[26] Der letzte Impuls beim Bodenkontakt um 23:18 Uhr UTC, neun Minuten nach dem Eintritt in die Atmosphäre,[4] wurde von den vier Landebeinen abgefangen.[87][88] Die Landestelle liegt bei 109,9° östlicher Länge und 25,1° nördlicher Breite.[89]
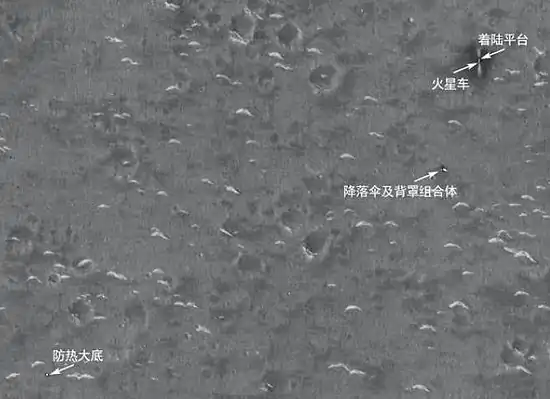
Am 2. Juni 2021 nahm der Orbiter mit seiner hochauflösenden Kamera ein Foto des Landegebiets auf, das die Nationale Raumfahrtbehörde fünf Tage später zusammen mit einem vor der Landung aufgenommenen Bild desselben Gebiets veröffentlichte. Von Südwesten nach Nordosten war dort zuerst die abgeworfene Bodenplatte, etwa 1,5 km weiter der obere Teil des Hitzeschilds mit dem Fallschirm, und noch einmal 400 m weiter der Lander mit dem sich zu jenem Zeitpunkt etwas südlich davon befindlichen Rover zu sehen.[90][91] Auf einer der Panoramaaufnahmen, die der Rover noch von der Landeplattform aus anfertigte, sind in der Ferne das auf der Seite liegende, rußgeschwärzte Oberteil des Hitzeschildes und der weiße Fallschirm zu sehen. Auf besagten Panoramaaufnahmen sind auch die sich nach Norden und Süden erstreckenden Verfärbungen des Marsbodens zu erkennen, die dadurch entstanden, dass nach der Landung die Treibstofftanks des Landers abgelassen wurden, um ein Explosionsrisiko zu vermeiden. Die dabei im Quasi-Vakuum des Mars entstehenden Gase und Aerosole schossen zu beiden Seiten heraus, um dann auf die Marsoberfläche abzusinken und zu gefrieren.[92]
Erste Erkundung
Der Rover führte nach der Landung zunächst eine Selbstüberprüfung seiner Systeme durch und fertigte Panoramaaufnahmen von der Landestelle an. Unterdessen führte der Orbiter am 17. Mai 2021 ein weiteres Bahnmanöver durch und nahm einen elliptischen Relais-Orbit von 265 × 15.000 km mit einer Umlaufzeit von 8,2 Stunden ein. Da ein Marstag 24,6 Erdstunden dauert, bedeutete das, der Orbiter umkreiste den Planeten genau dreimal pro Marstag.[93][79] Auf diese Art befand er sich an jedem Marstag einmal an seinem nächsten und einmal an seinem fernsten Punkt direkt über dem Rover und konnte ihm Steuersignale von der Erde übermitteln sowie vom Rover gesendete Daten zur Erde weiterleiten.[80][94] Am 22. Mai 2021 um 02:40 Uhr UTC rollte der Rover in Richtung Osten von der Ladefläche des Landers und begann mit der Erkundung.[95]
Während der ersten 90 Marstage (etwa 92 Erdtage, die ursprünglich erwartete Lebensdauer des Rovers) begann der Orbiter neben seiner Funktion als Relaissatellit bereits mit der wissenschaftlichen Erkundung der Marsoberfläche. Da der Rover am 15. August 2021, dem nominellen Ende seiner Primärmission, noch einwandfrei funktionierte, beschloss man, diesen Arbeitsmodus noch einen Monat beizubehalten. Der Datentransfer vom Orbiter zur Erde erfolgt über das X-Band mit einer Datenübertragungsrate von 16–4069 kbit/s. Empfangen werden die Signale mit den Antennen des Bodensegments des Marsprogramms in Miyun, Kunming und Wuqing. Am 8. Oktober 2021 fand jedoch eine Konjunktion von Erde, Sonne und Mars statt, die beiden Planeten befanden sich fast auf einer Linie, mit der Sonne in der Mitte. Die elektromagnetische Strahlung der Sonne stört um diese Zeit, für etwa 40 Tage von Mitte September bis Mitte Oktober 2021, die Funkverbindung zwischen dem Orbiter und den Bodenstationen auf der Erde. Daher stellten Orbiter und Rover während dieser Zeit ihre Erkundungsaktivitäten ein und gingen in einen Sicherheitsmodus über, wo sie nur noch Telemetriedaten übermittelten.[96]
Die Telemetriesignale des Orbiters wurden zusammen mit denen der europäischen Sonde Mars Express von einer internationalen Wissenschaftlergruppe genutzt, um die Konjunktion zu beobachten. Unter der Leitung des Astronomischen Observatoriums Shanghai, des Nationalen Zentrums für Weltraumwissenschaften, des Gemeinsamen Instituts für VLBI in Europa (JIVE),[97][98] und der University of Tasmania wurden die beiden Sonden mit den zusammengeschalteten Radioteleskopen bei Shanghai, Kunming, Ürümqi, Wettzell, Yebes, Medicina, Swetloje, Selentschukskaja, Tunkinski, Hobart und Johannesburg über Same Beam Interferometry (SBI) beobachtet. Mit dieser Methode können zwei Raumflugkörper, wenn ihr Winkelabstand gering ist, von zwei oder mehr Teleskopen auf einem gemeinsamen Funkstrahl beobachtet und ihre Position sehr genau bestimmt werden.[99] Während der Konjunktion wurden so 5 TB an Daten ermittelt. Wenn die Signale der beiden Sonden direkt an der Sonne vorbeilaufen, werden sie vom Sonnenwind beeinflusst. Aus den Veränderungen der Signale versuchen die Wissenschaftler nun Rückschlüsse auf die Mechanismen zu ziehen, mit denen Turbulenzen im Sonnenwind die Zu- und Abnahme der Elektronendichte im interplanetaren Raum beeinflussen und wie die mikroskopischen Turbulenzen mit der makroskopischen Strömungsgeschwindigkeit des Sonnenwinds zusammenhängen.
Missionsorbit
Nach dem Ende der Funkstörung am 20. Oktober fand am 8. November 2021 ein weiteres Bahnmanöver statt. Vier der acht Lageregelungstriebwerke mit jeweils 120 N Schubkraft wurden am marsnächsten Punkt der Bahn (Periares) für 260 Sekunden, also gut vier Minuten gezündet, was den Orbiter in seinen eigentlichen Missionsorbit von 265 × 10.700 km mit einer Umlaufzeit von 7,08 Stunden brachte. Das heißt, der Orbiter umkreist den Planeten nun 3,47 mal pro Marstag. Die Bahnneigung zum Äquator beträgt 87°.[100] Von dieser Polarbahn aus soll der Orbiter intensive Fernaufklärung betreiben.[18] Die Bahnparameter des im Vergleich zum ursprünglichen Plan (265 × 11.900 km mit einer Umlaufzeit von 7,8 Stunden) geänderten Missionsorbits wurden gewählt, weil der Orbiter so am Periares in die Ionosphäre des Mars eindringt, die sich zwischen 110 km und 400 km erstreckt. Auf dem Weg zum Apares bei 10.700 km durchquert der Orbiter die komplexen und variablen Schichten der Magnetosphäre des Mars: die Bugstoßwelle des Sonnenwinds, den sogenannten Magnetosheath zwischen Bugstoßwelle und Magnetopause und den Magnetschweif auf der sonnenabgewandten Seite des Mars. Die Wissenschaftler um Li Chunlai interessieren sich hierbei besonders für den Bereich zwischen 6100 km und 11.200 km über der Marsoberfläche, um die von der amerikanischen Sonde MAVEN bis in eine Höhe von 6228 km gemessenen Daten aus dem Ende des Magnetschweifs zu ergänzen. Mit dem Teilchendetektor, der niederenergetische Ionen im Bereich zwischen 5 eV und 25 keV registrieren kann, soll MAVENs Beobachtungslücke zwischen 50 eV und 3 keV gefüllt werden. Durch die im Vergleich zum ursprünglichen Plan kürzere Umlaufzeit kann der Orbiter für den Rover, der sich Anfang November noch in sehr gutem Zustand befand, besser als Relaissatellit fungieren, wodurch die Datensammel-Effizienz der Mission steigt.[101]
Neben der Erforschung von Ionosphäre und Magnetosphäre soll aus dem Orbit auch die Oberfläche des Mars untersucht werden. Wenn sich der Orbiter weniger als 800 km über der Oberfläche befindet, kann, ähnlich wie bei einem polarimetrischen Wetterradar die doppelte Polarisation (horizontal-horizontal oder horizontal-vertikal) des Bodenradars genutzt werden, das am 11. November 2021 in Betrieb genommen wurde,[42] um Wassereis auf oder unter der Oberfläche des Mars zu untersuchen. Außerdem ist es durch die kombinierte Verwendung mehrerer Instrumente möglich, eine genaue topografische Karte des Mars zu erstellen. Die von der Kamera mit mittlerer Auflösung gemachten Aufnahmen überlappen sich in Flugrichtung bis zu 60 %, die seitliche Überlappung der Schwads bei aufeinanderfolgenden Umläufen beträgt bis zu 15 %. Damit lassen sich dreidimensionale Geländemodelle erstellen (Luftbildmessung). Mit der hochauflösenden Kamera werden dann Details mit einer Auflösung von 50 cm hinzugefügt (Bildregistrierung) und die Höhe von Geländeformationen über das Bodenradar mit einer Genauigkeit von 1 m bestimmt. Neben der Geomorphologie rund um die Landestelle interessieren sich die Wissenschaftler besonders für von strömendem Wasser erzeugte Strukturen, Vulkane, Erosion durch Wind,[51] Einschlagkrater und die Gletscher der Polregionen.[18]
Bei dem gewählten Missionsorbit wandert der Periares durch periodische Bahnstörungen in einer sogenannten „Apsidendrehung“ von Süden nach Norden und dann wieder von Norden nach Süden.[102] Dies ermöglicht eine flächendeckende Beobachtung des Mars innerhalb von 200 Tagen. Die Ingenieure gehen davon aus, dass bis Juni 2022 ausreichend Informationen für die Planung der für Anfang Januar 2029 angesetzten Probenrückführmission gesammelt werden können. Es ist geplant, dass der Orbiter 14 Monate, also bis Ende 2022 in diesem Missionsorbit bleibt.[100] Anschließend wollen die Ingenieure, falls die Instrumente zu diesem Zeitpunkt noch funktionsfähig sind – die theoretische Betriebsdauer der Nutzlasten beträgt zwei Jahre – die Orbitalhöhe weiter absenken, um noch detailliertere Daten über den Mars zu erlangen.[103]
Im Dezember 2021 warf der Orbiter wie bereits auf dem Weg zum Mars eine WLAN-Kamera aus, um die Solarmodule sowie die korrekte Position der Bodenradar-Antennen und des Marsmagnetometer-Auslegers zu überprüfen. Da sich von der Kamera aus gesehen der Mars hinter der Sonde befand, entstanden dabei beeindruckende Aufnahmen der Nordpolregion mit dem eisgefüllten Korolev-Krater und den Olympia Undae, einem großen Dünenfeld.[104] Neben den WLAN-Kameras besitzt der Orbiter noch einen 1,6 m langen, nur 800 g schweren „Selfie-Stick“ aus Formgedächtnislegierung mit einer Videokamera am Ende. Nach dem Eintritt in den Marsorbit am 10. Februar 2021, dem 29. Tag des 12. Monats nach dem Bauernkalender, wurde der für den Transport zusammengefaltete Selfie-Stick durch Erwärmung ausgestreckt. Die Kamera ist auf die Unterseite des Orbiters gerichtet und dient zur Überprüfung der Triebwerke und der kugelförmigen Treibstofftanks auf Beschädigungen. Am 31. Januar 2022, genau ein Bauernjahr nach dem Einschwenken in den Orbit, veröffentlichte die Nationale Raumfahrtbehörde ein Kontrollvideo mit der im Hintergrund vorbeiziehenden Nordpolregion des Mars.[105]
Weblinks
- Überblick der Mission Tianwen-1 mit Einordnung in die Historie der chinesischen Raumfahrt (englisch mit einstellbaren Untertiteln in Deutsch und anderen Sprachen)
- Detaillierte Beschreibung des Fallschirms (chinesisch mit englischen Untertiteln)
- Website des Shanghaier Instituts für technische Physik (englisch)
- Sonderausgabe von Astrodynamics zur Landetechnik der Sonde (englisch)
Einzelnachweise
- 胡喆 – Hu, Zhe: 中国首次火星探测任务命名为“天问一号”. In: xinhuanet.com. 24. April 2020, abgerufen am 24. April 2020 (chinesisch).
- Rot-Weiß-Rot auf dem Weg zum Mars. Kleine Zeitung, Print, 23. Juli 2020, abgerufen 23. Juli 2020. – „Fragen an den Himmel“
- Andrew Jones: China’s Tianwen-1 enters orbit around Mars. Spacenews, 10. Februar 2021.
- 我国首次火星探测任务着陆火星取得圆满成功. In: cnsa.gov.cn. 15. Mai 2021, abgerufen am 15. Mai 2021 (chinesisch).
- 谭欣雨: China releases new Mars image taken by Tianwen 1 probe. 7. Juni 2021, abgerufen am 17. Juni 2021 (englisch).
- Helwig Schmidt-Glintzer: Geschichte der chinesischen Literatur. Scherz Verlag, Bern 1990, S. 36 f.
- 郭凯: China's first Mars mission named Tianwen 1. 24. April 2020, abgerufen am 16. Juni 2021 (englisch).
- 郭超凯: 中国首次火星探测任务被命名为“天问一号”. In: chinanews.com. 24. April 2020, abgerufen am 25. Juli 2020 (chinesisch). Video mit englischen Untertiteln.
- 从《天问》到“天问”. In: cnsa.gov.cn. 24. Juli 2020, abgerufen am 26. Juli 2020 (chinesisch).
- Wu Nan: Next stop – Mars: China aims to send rover to Red Planet within six years. In: scmp.com. South China Morning Post, 24. Juni 2014, abgerufen am 23. Februar 2016 (englisch).
- 张玉花 et al.: 我国首次自主火星探测任务中环绕器的研制与实践. (PDF; 2 MB) In: spaceflightfans.cn. 22. Juni 2020, abgerufen am 21. November 2020 (chinesisch).
- 小坦客: 天问一号-问鼎苍穹. In: zhuanlan.zhihu.com. 23. Juli 2020, abgerufen am 28. Juli 2020 (chinesisch).
- 焦点访谈:“天问一号”要成功奔向火星,还得闯多少关? In: yicai.com. 25. Juli 2020, abgerufen am 23. April 2021 (chinesisch).
- 天问一号火星车高清正脸照公开,国旗亮眼!额头上有一古代篆文. In: sohu.com. 6. April 2021, abgerufen am 16. Mai 2021 (chinesisch).
- 张玉花:与“嫦娥”相伴的“最美”科学家. In: news.sciencenet.cn. 12. September 2019, abgerufen am 21. November 2020 (chinesisch).
- 下个任务是嫦娥五号的采样返回. In: k.sina.com.cn. 22. Juni 2019, abgerufen am 21. November 2020 (chinesisch).
- 着陆火星——当年一起吹过的牛,只有中国实现了. In: zhuanlan.zhihu.com. 16. Mai 2021, abgerufen am 18. Mai 2021 (chinesisch).
- Li Chunlai, Zhang Rongqiao, Yu Dengyun et al.: China’s Mars Exploration Mission and Science Investigation. (PDF; 3,7 MB) In: springer.com. 25. Mai 2021, abgerufen am 11. Juni 2021 (englisch).
- 张玉花 et al.: 我国首次自主火星探测任务中环绕器的研制与实践. (PDF; 2 MB) In: spaceflightfans.cn. 22. Juni 2020, S. 8, abgerufen am 21. November 2020 (chinesisch).
- Gerlinde Tuscher: LOG-O-BUCH: FFG Logo ziert Kapsel der Chinesischen Rakete „Langer Marsch 5“. In: ffg.at. 20. Juli 2020, abgerufen am 25. Juli 2020.
- Tianwen-1. In: iwf.oeaw.ac.at. Abgerufen am 22. Juli 2021.
- Weltraummagnetometer. In: iwf.oeaw.ac.at. Abgerufen am 25. Juli 2020.
- Andrew Jones: China reveals more details of its 2020 Mars mission. In: gbtimes.com. 21. März 2016, abgerufen am 22. März 2016 (englisch).
- 邓剑峰 et al. – Deng, Jianfeng et al.: 基于改进多模型的火星大气进入自适应估计方法. In: jdse.bit.edu.cn. Abgerufen am 18. Mai 2019 (chinesisch).
- HOW ON EARTH did China succeed in landing Zhurong rover on Mars? Review of CNSA deep space missions (ab 0:15:10) auf YouTube, 13. Juni 2021, abgerufen am 17. Juni 2021.
- Andrew Jones: Here's What You Need to Know About China's Mars Rover. In: spectrum.ieee.org. 21. März 2021, abgerufen am 26. April 2021 (chinesisch).
- 探火新材料,表面“热浪滚滚”,里面“凉爽宜人”. In: spaceflightfans.cn. 24. Juli 2020, abgerufen am 24. Juli 2020 (chinesisch).
- 朱晓颖 – Zhu, Xiaoying: 孙泽洲:嫦娥五号预计今年底发射 “探火”将带巡视器. In: xinhuanet.com. 12. April 2019, abgerufen am 5. Mai 2019 (chinesisch).
- Andrew Jones: China’s first Mars spacecraft undergoing integration for 2020 launch. In: spacenews.com. 29. Mai 2019, abgerufen am 22. Juni 2019 (englisch).
- China unveils first picture of its Mars explorer. In: news.cgtn.com. 12. Oktober 2019, abgerufen am 13. Dezember 2019 (englisch).
- 国家航天局邀请多国驻华使节和媒体观摩中国首次火星探测任务着陆器悬停避障试验. In: clep.org.cn. 14. November 2019, abgerufen am 16. November 2019 (chinesisch).
- 中国首次火星探测任务着陆器悬停避障试验现场视频. In: clep.org.cn. 14. November 2019, abgerufen am 16. November 2019 (chinesisch). Video vom Test.
- 丁亮 – Ding, Liang: 我校隆重举行火星探测器应急信标试验队出征仪式. In: astro.nuaa.edu.cn. 10. April 2020, abgerufen am 14. April 2020 (chinesisch).
- 航天学院火星信标项目通过评审. In: youth.nuaa.edu.cn. 28. Februar 2019, abgerufen am 14. April 2020 (chinesisch).
- 火星探测步步惊心,不是探月的简单“复制”和“粘贴”. In: tech.sina.com.cn. 3. August 2020, abgerufen am 4. August 2020 (chinesisch).
- 耿言 et al.: 我国首次火星探测任务. In: jdse.bit.edu.cn. 28. Juni 2018, abgerufen am 23. April 2021 (chinesisch).
- Weijie Zhao: Tianwen-1 and China's Mars exploration program. In: National Science Review. Band 8, nwaa285, 1. Februar 2021, ISSN 2095-5138, doi:10.1093/nsr/nwab001 (englisch).
- Dirk Assendorpf: Hello Mars. In: DIE ZEIT. Nr. 24, 4. Juni 2020, Seite 33.
- 刘建军 – Liu, Jianjun: 中国首次火星探测任务地面应用系统. In: jdse.bit.edu.cn. 5. Mai 2015, abgerufen am 5. Juni 2020 (chinesisch).
- 李学磊: 国家航天局举办新闻发布会 介绍我国首次火星探测任务情况. In: gov.cn. 12. Juni 2021, abgerufen am 14. Juni 2021 (chinesisch).
- “祝融号”火星车完成既定探测任务,后续将开展拓展任务! In: spaceflightfans.cn. 17. August 2021, abgerufen am 17. August 2021 (chinesisch).
- Smriti Mallapaty: China’s Mars rover has amassed reams of novel geological data. In: nature.com. 30. November 2021, abgerufen am 30. November 2021 (englisch).
- Andrew Jones: China Space News Update - Issue #3. In: getrevue.co. 23. Februar 2021, abgerufen am 24. Februar 2021 (englisch).
- 中国电科以技术创新为“天问一号”乘风破浪保驾护航. In: cnsa.gov.cn. 23. Juli 2020, abgerufen am 25. Juli 2020 (chinesisch).
- 孔令高 et al.: 自主火星探测高集成离子与中性粒子分析仪. In: jdse.bit.edu.cn. 13. Dezember 2018, abgerufen am 25. Juli 2020 (chinesisch).
- Zhang Aibing, Peter Wurz, Wang Chi et al.: Tianwen-1 MINPA observations in the solar wind. In: eppcgs.xml-journal.net. 9. Dezember 2021, abgerufen am 29. Dezember 2021 (englisch).
- 李春来 et al.: 中国首次火星探测任务科学目标与有效载荷配置. In: jdse.bit.edu.cn. 21. März 2018, abgerufen am 27. Juli 2020 (chinesisch).
- Zhou Bin et al.: The subsurface penetrating radar on the rover of China’s Mars 2020 mission. In: ieeexplore.ieee.org. 22. September 2016, abgerufen am 5. Juli 2019 (englisch).
- 许琦敏: “天问一号”启程,探测火星它带上了哪些“神器”? In: sohu.com. 23. Juli 2020, abgerufen am 23. April 2021 (chinesisch).
- Der Luftdruck auf dem Nullniveau des Mars beträgt 600 Pa, die Primärlandestelle des Rovers liegt etwa 4000 m unterhalb des Nullniveaus.
- Jia Yingzhuo, Fan Yu, Zou Yongliao: Scientific Objectives and Payloads of Chinese First Mars Exploration. (PDF; 332 KB) In: nssc.cas.cn. 6. September 2018, abgerufen am 15. Juni 2021 (englisch).
- 闫明星 – Yan, Mingxing: 优秀毕业生节德刚:一个全面发展的当代大学生. In: cy.jxstnu.edu.cn. 14. April 2008, abgerufen am 21. September 2019 (chinesisch).
- 节德刚 – Jie, Degang: 首次火星探测任务科学目标先期研究团队招募公告. In: clep.org.cn. 5. Juli 2019, abgerufen am 21. September 2019 (chinesisch).
- 刘桢珂: 这次“大火箭”飞得更快,“天问一号”成功入轨! In: photo.china.com.cn. 23. Juli 2020, abgerufen am 23. Juli 2020 (chinesisch).
- 深空探测新一步!我国首次火星探测任务探测器成功起航. In: cnsa.gov.cn. 24. Juli 2020, abgerufen am 26. Juli 2020 (chinesisch).
- 奔火:飞向“乌托邦”. In: spaceflightfans.cn. 24. Juli 2020, abgerufen am 24. Juli 2020 (chinesisch).
- “胖五”为了“奔火”有多拼? In: cnsa.gov.cn. 24. Juli 2020, abgerufen am 26. Juli 2020 (chinesisch).
- 吕炳宏、付毅飞: 中国深空测控网将全程护送“天问一号”探火. In: stdaily.com. 24. Juli 2020, abgerufen am 24. Juli 2020 (chinesisch). Das Foto zeigt die Tiefraumstation Kashgar.
- 赵聪: 一文解读嫦娥五号月面起飞. In: spaceflightfans.cn. 5. Dezember 2020, abgerufen am 5. Dezember 2020 (chinesisch).
- 天问一号探测器完成第一次轨道中途修正. In: spaceflightfans.cn. 2. August 2020, abgerufen am 2. August 2020 (chinesisch).
- 胡喆: “天问一号”探测器完成第二次轨道中途修正. In: xinhuanet.com. 21. September 2020, abgerufen am 21. September 2020 (chinesisch).
- 马永香: 太空中的中国国旗!来自天问一号的自拍! In: spaceflightfans.cn. 1. Oktober 2020, abgerufen am 1. Oktober 2020 (chinesisch).
- 中国探月航天: 天外送祝福,月圆迎华诞——天问一号以“自拍国旗”祝福祖国71华诞. In: mp.weixin.qq.com. 1. Oktober 2020, abgerufen am 1. Oktober 2020 (chinesisch).
- 钱中兵: “天问一号”探测器顺利完成深空机动. In: xinhuanet.com. 10. Oktober 2020, abgerufen am 10. Oktober 2020 (chinesisch).
- 王世玉、杨璐: “天问一号”完成第三次轨道中途修正 已飞行97天. In: news.cctv.com. 29. Oktober 2020, abgerufen am 29. Oktober 2020 (chinesisch).
- 王亚平: 天问一号探测器顺利完成第四次轨道中途修正. In: spaceflightfans.cn. 6. Februar 2021, abgerufen am 6. Februar 2021 (chinesisch).
- 天问一号完成第四次轨道中途修正 传回首幅火星图像. In: clep.org.cn. 5. Februar 2021, abgerufen am 5. Februar 2021 (chinesisch).
- 天问一号探测器成功实施火星捕获 中国首次火星探测任务环绕火星获得成功. In: clep.org.cn. 10. Februar 2021, abgerufen am 1. März 2021 (chinesisch).
- 刘庆会: 火星探测VLBI测定轨技术. In: jdse.bit.edu.cn. 5. Mai 2018, abgerufen am 1. März 2021 (chinesisch).
- 蔡彬: 航天科技集团六院78台发动机千吨动力开启中国首次探火之旅. In: guoqing.china.com.cn. 23. Juli 2020, abgerufen am 24. Juli 2020 (chinesisch).
- 国家航天局发布天问一号探测器火星捕获过程影像1. In: clep.org.cn. 12. Februar 2021, abgerufen am 12. Februar 2021 (chinesisch).
- 国家航天局发布天问一号探测器火星捕获过程影像2. In: clep.org.cn. 12. Februar 2021, abgerufen am 12. Februar 2021 (chinesisch).
- 天问一号探测器完成远火点平面轨道调整. In: clep.org.cn. 15. Februar 2021, abgerufen am 15. Februar 2021 (chinesisch).
- 连政: “天问一号”探测器成功进入火星轨道. In: guancha.cn. 10. Februar 2021, abgerufen am 11. Februar 2021 (chinesisch). Enthält Video von den Bahnkorrekturmanövern.
- 陈立: 奔火:飞向“乌托邦”. In: mp.weixin.qq.com. 24. Juli 2020, abgerufen am 26. April 2021 (chinesisch).
- 天问一号探测器成功实施近火制动进入火星停泊轨道. In: cnsa.gov.cn. 24. Februar 2021, abgerufen am 24. Februar 2021 (chinesisch).
- 刘岩 et al.: 空间站、探火、重型火箭、可重复使用火箭等航天工程进展受关注. In: spaceflightfans.cn. 11. März 2021, abgerufen am 11. März 2021 (chinesisch).
- 天问一号探测器拍摄高清火星影像. In: cnsa.gov.cn. 4. März 2021, abgerufen am 4. März 2021 (chinesisch). Die hochauflösenden Schwarzweißbilder wurden aus einer Höhe von 330–350 km aufgenommen, mit einer Auflösung von 70 cm pro Pixel. Der große Krater auf dem zweiten Bild hat einen Durchmesser von 620 m.
- 天问一号着陆过程两器分离和落火影像发布. In: cnsa.gov.cn. 19. Mai 2021, abgerufen am 20. Mai 2021 (chinesisch). Das obere Foto wurde mit der Hindernisvermeidungskamera aufgenommen (rechts unten ein Vorderrad des Rovers), das zweite Foto mit der nach hinten gedrehten topografischen Stereokamera. Die Videosequenzen wurden vom Orbiter aufgenommen und zeigen das Abkoppeln der Lander-Rover-Gruppe vor der Landung am 14. Mai 2021.
- 肖欢欢: “祝融号”火星车即将驶出 即将实施两器互拍. In: 163.com. 17. Mai 2021, abgerufen am 20. Mai 2021 (chinesisch).
- 张建松、周琳: 2分钟为你模拟飞向火星全过程! In: xinhuanet.com. 23. Juli 2020, abgerufen am 23. Juli 2020 (chinesisch). Enthält Video vom Flug und den Bahnmanövern.
- 董光亮、李海涛 et al.: 中国深空测控系统建设与技术发展. In: jdse.bit.edu.cn. 5. März 2018, abgerufen am 20. Mai 2021 (chinesisch).
- 2020中国火星探测计划(根据叶院士报告整理). In: spaceflightfans.cn. 14. März 2018, abgerufen am 21. Mai 2021 (chinesisch).
- 乔学荣、郭际、米娟: 高比能量锂氟化碳电池在深空探测器上的应用试验研究. In: jdse.bit.edu.cn. 11. Februar 2020, abgerufen am 25. Juli 2020 (chinesisch).
- Zhurong (Tianwen1) Mars Rover Landing Simulation(CAST) 祝融号(天问一号)火星车着陆模拟(航天五院) 祝融號(天問一號)火星車著陸模擬(航天五院) (ab 0:01:00) auf YouTube, 15. Mai 2021, abgerufen am 25. Mai 2021.
- Huang Xiangyu et al.: The Tianwen-1 Guidance, Navigation, and Control for Mars Entry, Descent, and Landing. In: spj.sciencemag.org. 16. Oktober 2021, abgerufen am 20. Oktober 2021 (englisch).
- Andrew Jones: China’s first Mars spacecraft undergoing integration for 2020 launch. In: spacenews.com. 29. Mai 2019, abgerufen am 5. Juli 2019 (englisch).
- 2020中国火星探测计划(根据叶院士报告整理). In: spaceflightfans.cn. 14. März 2018, abgerufen am 5. Juli 2019 (chinesisch).
- 喻晓璇: “祝融号”火星车顺利发回遥测信号,着陆具体坐标公布. In: thepaper.cn. 15. Mai 2021, abgerufen am 20. Mai 2021 (chinesisch).
- 国家航天局发布我国首次火星探测天问一号任务着陆区域高分影像图. In: clep.org.cn. 7. Juni 2021, abgerufen am 7. Juni 2021 (chinesisch).
- 杨璐、陈刚、刘庆丰: 我国公布天问一号轨道器拍摄的祝融号火星车影像. In: spaceflightfans.cn. 7. Juni 2021, abgerufen am 7. Juni 2021 (chinesisch). Auf dem vergrößerbaren Bild ist Norden rechts.
- 祝融号两器合影亮点纷呈:进入舱背罩出镜,变推发动机蹲出大坑. In: sohu.com. 11. Juni 2021, abgerufen am 12. Juni 2021 (chinesisch).
- 中国首张火星表面照片来了!为什么用了4天,而美国只用20分钟? In: 360doc.com. 20. Mai 2021, abgerufen am 21. Mai 2021 (chinesisch).
- 中国火星车登陆 为什么还没照片?对地"网速"只有16bps. In: finance.sina.com.cn. 17. Mai 2021, abgerufen am 21. Mai 2021 (chinesisch).
- 金立旺: “祝融号”火星车成功驶上火星表面. In: xinhuanet.com. 22. Mai 2021, abgerufen am 22. Mai 2021 (chinesisch).
- 天问一号探测器进入日凌阶段. In: mp.weixin.qq.com. 5. Oktober 2021, abgerufen am 5. Oktober 2021 (chinesisch).
- 国家天文台正式加入欧洲VLBI联合研究所. In: cas.cn. 6. März 2006, abgerufen am 22. Oktober 2021 (chinesisch).
- About JIVE. In: jive.nl. Abgerufen am 22. Oktober 2021 (englisch).
- 韩松涛 et al.: 探月卫星同波束干涉测量技术应用研究. In: jeit.ie.ac.cn. 18. Februar 2019, abgerufen am 22. Oktober 2021 (chinesisch).
- 谢攀: 火星“劳模”又双叒变轨了,这回去的是... In: mp.weixin.qq.com. 9. November 2021, abgerufen am 14. November 2021 (chinesisch).
- 耿言、陈刚: 天问一号环绕器进入遥感使命轨道. In: mp.weixin.qq.com. 8. November 2021, abgerufen am 8. November 2021 (chinesisch).
- Daniel Estévez: Tianwen-1 remote sensing orbit. In: destevez.net. 10. November 2021, abgerufen am 14. Dezember 2021 (englisch).
- 单晓冰: “天问一号”环绕器进入遥感使命轨道 开展火星全球探测. In: ce.cn. 9. November 2021, abgerufen am 14. November 2021 (chinesisch).
- 天问一号探测器传回最新图像. In: cnsa.gov.cn. 1. Januar 2022, abgerufen am 1. Januar 2022 (chinesisch). Auf dem ersten Bild liegt der Korolev-Krater links oben, das dunkle Gebiet unter dem Orbiter sind die Olympia Undae, der Nordpol befindet sich rechts unten. Auf dem zweiten Bild ragt des Ausleger des Marsmagnetometers nach links oben. Die dünnen Stäbe sind die Antennen des Bodenradars.
- 天问一号传回“新春祝福”视频. In: mp.weixin.qq.com. 31. Januar 2022, abgerufen am 31. Januar 2022 (chinesisch).

„Mars“-Raumsonden (1960–1973) | Mariner 3,4,6–9 (1964–1971) | Zond 2 (1964) | Viking 1,2 (1975) | Fobos 1,2 (1988) | Mars Observer (1993) | Mars Global Surveyor (1996) | Mars 96 (1996) | Mars Pathfinder mit Sojourner (1996) | Nozomi (1998) | Mars Climate Orbiter (1998) | Mars Polar Lander mit Deep Space 2 (1999) | 2001 Mars Odyssey (2001) | Mars Express mit Beagle 2 (2003) | Mars Exploration Rover mit Spirit (2003) und Opportunity (2003) | Mars Reconnaissance Orbiter (2005) | Phoenix (2007) | Phobos-Grunt (2011) | Yinghuo-1 (2011) | Curiosity (2011) | Mars Orbiter Mission (2013) | MAVEN (2013) | ExoMars Trace Gas Orbiter (2016) | Schiaparelli (2016) | InSight (2018) | al-Amal (2020) | Tianwen-1 mit Zhurong (2020) | Perseverance mit Ingenuity (2020)
Geplante Missionen
ExoMars Rover (2022) |
Martian Moons Exploration (2024)
Kursiv geschriebene Missionen sind aktiv.
Gestrichene Missionen: Mars Surveyor 2001 | Mars Telecommunications Orbiter | Mars Science and Telecommunications Orbiter | P5A | Red Dragon
(Siehe auch: Liste von künstlichen Objekten auf dem Mars | Chronologie der Marsmissionen)