Bodenradar
Ein Bodenradar, auch Georadar, engl. Ground Penetrating Radar (GPR) oder Radio Echo Sounding (RES), erlaubt eine zerstörungsfreie Charakterisierung des Untergrundes mit hochfrequenten elektromagnetischen Wellen. In der Geophysik dient es im Wesentlichen zur Untersuchung der oberen Schichten der Erdkruste. In militärischen Anwendungen wird es zum Aufspüren von Landminen eingesetzt.

Beschreibung
Als Bodenradar können verschiedene Radar-Technologien verwendet werden. Das Impulsradar verwendet eine Amplitudenmodulation als Ultrabreitband-Verfahren im Zeitbereich. Möglich ist auch das Dauerstrichradarverfahren -- entweder kontinuierlich oder diskret frequenzmoduliert (SFCW).[1] Beim Pulsradar ergibt sich die Entfernung aus der Zeitdifferenz zwischen dem Senden eines kurzen Pulses und dem Eintreffen der reflektierten Signale am Empfänger. Bei FMCW- und SFCW-Radaren wird die Differenzfrequenz bzw. Differenzphase zwischen Sende- und Empfangssignal ausgewertet.
Generell wird eine möglichst große Bandbreite des Sendesignals angestrebt. Eine Möglichkeit zur technischen Realisierung einer großen Bandbreite ist, die untere Grenzfrequenz gegen Null streben zu lassen. Die Signalform wird dann nicht auf eine Trägerfrequenz moduliert, sondern es wird nur ein extrem kurzer Hochspannungsimpuls im Bereich von wenigen Pikosekunden bis zu einigen Nanosekunden auf die Sendeantenne gegeben. Die resultierende Art von Sendesignalen wird als Basisbandpuls bezeichnet. Gesendet wird dann eine Impulsform als ein sogenannter „Mexikanischer Hut“, der durch die zweite Ableitung einer Glockenkurve gebildet wird. Die Bandbreite ergibt sich aus der Kürze des Hochspannungsimpulses. Der Empfänger wird dann auf die Mittenfrequenz der Bandbreite abgestimmt. Als Antenne dient meist ein elektrisch verkürzter Dipol oder Spreizdipol,[2] der manchmal sogar in direktem Kontakt mit der Erdoberfläche steht um Einkopplungsverluste beim Übergang von der Luft in das Erdreich zu verringern. Das gesamte Bodenradar wird dann zum Beispiel auf einer Plane über den Boden geschleift. Bei einem größeren Abstand zur Erdoberfläche werden auch kurze TEM-Hornstrahler genutzt,[2] die dann wegen des tiefen Frequenzbereiches relativ große Ausmaße haben.
Bei Dauerstrichradargeräten werden getrennte Sende- und Empfangsantennen mit einem gewissen Abstand zueinander genutzt. Dauerstrichradare sind meist schmalbandig und erzielen die notwendige Bandbreite durch schrittweise oder kontinuierliche Änderung der Mittenfrequenz. Diese Radargeräte können beliebige Breitbandantennen verwenden, die das Spektrum des Senders abdecken.[2] Sie senden zwar mit geringerer Leistung, haben aber durch die Integration der Echosignale über die Zeit eine bessere Rauschunterdrückung. Die Messungen dauern deshalb länger, das Bodenradar darf höchstens im Schritttempo über den Untergrund bewegt werden. Impulsradargeräte können dagegen in Fahrzeuge eingebaut während des schnell fließenden Verkehrs genutzt werden.
Die Arbeitsfrequenzen liegen im Bereich von 1 bis 2400 MHz. Die Wahl des Frequenzbereichs ist ein Kompromiss zwischen der gewünschten Auflösung, der zu erzielenden Eindringtiefe und des frequenzabhängigen Effekts von Bodeninhomogenitäten. Spezielles Minensuchradar kann auch höhere Frequenzen bis 4 GHz verwenden, da die meisten Minen nur bis in eine Tiefe von 20 cm ausgebracht sind.[3]
Radargramm
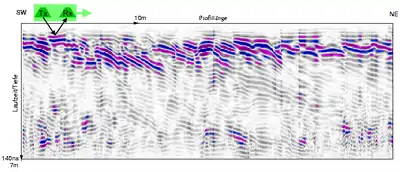
Das Bild zeigt ein Beispiel eines Bodenradarbildes. Der Abstand zwischen dunkelgrüner Sende- zur Empfangsantenne ist konstant. Jede Messung erzeugt eine Spalte im Bild. Durch Verschieben der Sende- und Empfangseinheit entlang der Profillinie erhält man eine zweidimensionale Darstellung der Reflexionen im Untergrund.
Die Ausbreitung der elektromagnetischen Wellen im Untergrund ist stark abhängig von den im Boden befindlichen Strukturen, die Reflexion, Streuung, Beugung und Transmission der eingestrahlten Welle hervorrufen. Durch die tiefen Frequenzen können die Antennen keine große Richtwirkung erhalten. Ein reflektierendes Objekt im Boden wird deswegen schon aus größerer Entfernung geortet. Diese Signale ergeben bei der Überfahrt über das Objekt in der Summe eine hyperbelförmige Form in dem Radarbild.
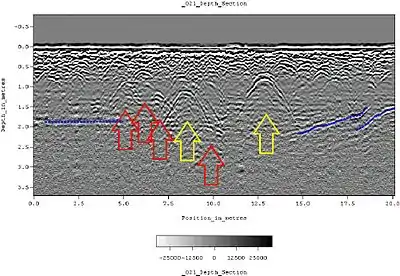
Für die Umwandlung der Laufzeit des Signals in eine Tiefenangabe (Zeit-Tiefen-Konversion) wird die jeweilige Ausbreitungsgeschwindigkeit des elektromagnetischen Signals in den von ihm durchlaufenen Medien benötigt, die von den spezifischen elektrischen Eigenschaften der jeweiligen Medien abhängt. Bei der Berechnung der Tiefe muss also die Bodenstruktur beachtet werden. Dafür gibt es Tabellen, die abhängig von der Bodenart und der Feuchtigkeit die Ausbreitungsgeschwindigkeit in Meter pro Nanosekunde angeben.[4] Zur Zeit-Tiefen-Konversion müssen daher weitere geologische Informationen (z. B. aus Kernbohrungen) herangezogen werden. Dies ist jedoch nicht die einzige Möglichkeit, die Ausbreitungsgeschwindigkeit zu bestimmen. Durch Analyse der Hyperbel, die ein einfacher Reflektor, wie zum Beispiel ein Rohr, im Radargramm hinterlässt, kann man ebenfalls auf die Ausbreitungsgeschwindigkeit schließen.
Anwendungsbereiche
Zur Erkundung des flachen Untergrundes wird das Bodenradar als nicht-invasive Methode bei geologischen und geotechnischen Fragestellungen, etwa zum Deichmonitoring und Hochwasserschutz[5], sowie in der Rohstoffexploration (Sand, Kies), der Leitungsverlaufs-Erkundung und für ingenieurgeologische Untersuchungen eingesetzt. Weitere Anwendungsmöglichkeiten liegen im Bereich der Archäologie, der technischen Untersuchungen von Altlasten-Standorten (unterirdische Einbauten und Hohlräume, Auffüllungen, Leitungen und Bodenschichtverläufe) sowie im Berg- und Tunnelbau.
Die Raumsonde Mars Express untersucht mit dem Radar MARSIS den Marsboden in einer Tiefe von bis zu 5 km. Der Abstand der Antenne zum Boden beträgt mehr als 300 km bis maximal 800 km. MARSIS ist auch in der Lage, die Ionosphäre zu sondieren. Die Messfrequenz liegt bei 1,8–5 MHz, 0,1–5 MHz bei Ionosphärenmessung.
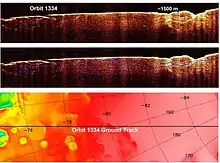
Die amerikanische Sonde Mars Reconnaissance Orbiter trägt ein ähnliches Bodenradar, das SHARAD (Shallow Radar). Die höhere Messfrequenz von 15–25 MHz liefert eine höhere Auflösung als MARSIS, dafür aber eine geringere Eindringtiefe. Das Bild rechts zeigt ein SHARAD-Radargramm entlang der im unteren Teilbild gezeigten Spur. Die Farben charakterisieren das Höhenprofil von Grün (Senke) zu Rot (Erhebung). Die Abschätzung der Profiltiefe erfolgte über eine Schätzung der Signalausbreitungsgeschwindigkeit im Gestein.
GPR kann zur Vermessung der Dicke von Gletschereis dienen.
Ein Beispiel ist der Fund eines 1942 verloren gegangenen Flugzeuges 91 m unter dem Grönland-Eis mittels GPR an Bord einer Drohne.[6]
Neuere Entwicklungen ermöglichen, Bodenradar mit einem Hubschrauber in unzugänglichen Gegenden zum Beispiel zur Kartierung vom Grundwasserspiegel, von Gletschern oder Sedimentschichten einzusetzen. Die typische Arbeitshöhe des Bodenradars liegt bei 15 bis 25 m über der Oberfläche. In der Datenverarbeitung wird die genaue momentane Position des Radars durch GPS erfasst und erlaubt ein Hinterlegen der Messergebnisse mit digitalem Kartenmaterial. Der Messvorgang erlaubt eine Fluggeschwindigkeit über Grund zwischen 40 und 80 km/h.[7]
Bohrlochradar
Eine weitere Anwendung des Bodenradars ist das Bohrlochradar, welches speziell für Bohrlöcher konzipiert ist. Eine Methode der Geophysik sind Testbohrungen zur Materialanalyse. In diesem Zusammenhang bieten Bohrlochradarsysteme eine wesentliche Möglichkeit der Charakterisierung der Umgebung dieser Bohrungen unter Einsatz eines nicht-invasiven Bodenradarsystems. Hauptsächlich werden Bohrlochradarsysteme mit omnidirektionalen Empfangsantennen eingesetzt, die den Abstand von Reflektoren messen, jedoch keine Information über den azimutalen Winkel. Richtungssensitive Antennen hingegen ermöglichen die Messung der Entfernung und Richtung der reflektierten Echos.
Literatur
- Jürg Leckebusch: Die Anwendung des Bodenradars (GPR) in der archäologischen Prospektion – 3D-Visualisierung und Interpretation. Leidorf, Rahden 2001, ISBN 3-89646-403-5.
- D. J. Daniels: Ground-penetrating radar. Inst. of Electrical Engineers, London 2004, ISBN 0-86341-360-9.
- C. S. Bristow: Ground penetrating radar in sediments. Geological Society, London 2003, ISBN 1-86239-131-9.
- Harry M. Jol: Ground Penetrating Radar – Theory and Applications. Elsevier, Amsterdam 2009, ISBN 978-0-444-53348-7.
- Günter Schlögel: Modellierung und Lokalisierung kleinräumiger Einlagerungen (Kriegsrelikte) im Untergrund mit Georadar. Dipl.-Arb., Montanuniv. Leoben 2007, (pdf, 3,5 MB, abgerufen 9. März 2009).
- Olaf Borchert: Receiver Design for a Directional Borehole Radar System. Dissertation. Bergische Universität, Wuppertal 2008, (pdf, 8,2 MB, abgerufen 12. Oktober 2009).
- Jan-Florian Höfinghoff: Untersuchungen zur Anwendbarkeit von Georadar in der Bohrgarnitur. Dissertation. Leibniz Universität, Hannover 2013, ISBN 978-3-944586-23-6.
Weblinks
Einzelnachweise
- Merrill Skolnik: Radar Handbook, Third Edition McGraw-Hill Professional, 2008, ISBN 978-0-07-148547-0, S. 21.20
- D. J. Daniels: Ground-penetrating radar. Inst. of Electrical Engineers, London 2004, ISBN 0-86341-360-9, S. 177f (eingeschränkte Vorschau in der Google-Buchsuche)
- Martin Fritzsche, Anwendung von Verfahren der Mustererkennung zur Detektion von Landminen mit Georadaren in „Forschungsberichte aus dem Institut für Höchstfrequenztechnik und Elektronik der Universität Karlsruhe“; Karlsruhe, Univ., Diss., 2001 Band 30 Seite 8
- Knödel, Klaus,: Geophysik : mit 57 Tabellen. 2. Auflage. Springer, Berlin 2005, ISBN 978-3-540-22275-0.
- Georadar - Stabilität von Deichen ermitteln, (Memento vom 18. November 2015 im Internet Archive) Portal „planeterde“, abgerufen am 18. November 2015.
- https://crev.info/2018/08/ww2-aircraft-found-300-ft-greenland-ice/ David F. Coppedge: WW2 Aircraft Found Under 300 Ft of Greenland Ice, abgerufen am 20. Okt. 2019
- technische Spezifikation des HERA (HElicopter RAdar) der Firma RST in der Schweiz.