Laserscanning
Laserscanning (auch Laserabtastung) bezeichnet das zeilen- oder rasterartige Überstreichen von Oberflächen oder Körpern mit einem Laserstrahl, um diese zu vermessen, zu bearbeiten oder um ein Bild zu erzeugen. Sensoren, die den Laserstrahl entsprechend ablenken, heißen Laserscanner. Ein Laserscanner, der neben der Objektgeometrie zusätzlich die Intensität des reflektierten Signals erfasst, wird abbildender Laserscanner genannt. Die Aufnahme der Intensitätswerte des von den aufgenommenen Oberflächen reflektierten Laserlichtes erfolgt bei heutigen Lasermesssystemen in 16-bit-Graustufen. Im Ergebnis erhält man ein Abbild der Oberflächen ähnlich dem eines Schwarzweißfotos.

Der Laserscanner
Ein Laserscanner besteht aus einem Scankopf und einer Treiber- und Ansteuerelektronik. Die Elektronik besteht aus einem leistungselektronischen Teil, der die Ströme für die Antriebe liefert, und aus einer z. B. auf einem PC oder eingebetteten System laufenden Scannersoftware, die die Treiberelektronik anspricht.
Bei Messanwendungen wird das Ergebnis des Scanvorganges von Sensoren über den gleichen oder einen getrennten optischen Weg empfangen und üblicherweise von der gleichen Scannersoftware erfasst, die auch die anderen Komponenten anspricht und kontrolliert.
Scankopf
Im Scankopf wird der Laserstrahl abgelenkt, dessen Ablenkungswinkel gemessen und (meistens) elektronisch geregelt wird.
Scanmechanismen
Das Abtasten einer 3D-Oberfläche mit einem Laserstrahl erfordert unterschiedliche Scanmechanismen, um den Laser über die Oberfläche zu bewegen. Dabei werden folgende Grundscanmodi unterschieden:[1]
- Der Scanvorgang wird durch zwei orthogonal angebrachte Spiegel durchgeführt, was typisch für terrestrische Scanner mit einem eingeschränkten Sichtfeld ist.
- Der Laserstrahl scannt in eine Richtung mit dem Scanspiegel, und dieser rotiert mit Hilfe einer mechanischen Vorrichtung. Das ist typisch für terrestrische Scanner mit einem panorama- oder hemisphärischen Sichtfeld.
- Der Laserstrahl scannt in eine Richtung und ist in einem Flugzeug angebracht. In diesem Fall ist eine zweite Scanrichtung durch die Bewegung des Flugzeugs gegeben, und es wird ein aus GPS und IMS kombiniertes System genutzt, um die Position und die Orientierung zu messen.
- Im Fall eines Triangulationsscanners wird eine Linie anstatt eines einzelnen Punktes projiziert. In diesem Fall ist der Scan auf eine Richtung beschränkt. Projektionen von mehreren Linien oder Streifenmustern erlauben es, ganze Felder aufzunehmen.
- Klassisches Scannen kann durch die Flash-Lidar-Technik vermieden werden. Genauer gesagt, durch die Fortschritte in der CMOS-Technologie. Diese Systeme basieren auf einem Flutlichtgerät, das Licht auf eine zu untersuchende Fläche projiziert und eine zweidimensionale Erfassung der TOF-Daten ermöglicht.
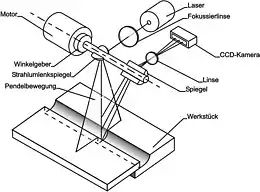
Spiegelscanner

Die einfachste Methode, um eine Scanbewegung zu erzeugen, ist die Veränderung der Orientierung eines Spiegels, an dem der Laserstrahl reflektiert wird. In einer räumlichen Dimension kann das durch einen Galvanometerantrieb (kurz: Galvo), durch einen sich kontinuierlich drehenden Spiegel oder durch ein sich kontinuierlich drehendes Spiegelprisma (Polygonspiegel) erfolgen, je nachdem, ob eine frei programmierbare Bewegung (Vektorsteuerung) oder eine periodische Bewegung (Zeile, Bild) gewünscht ist. Man unterscheidet daher üblicherweise Vektorscanner und Rasterscanner.
Zur zweidimensionalen Ablenkung muss entweder ein Spiegel in zwei Richtungen ausgelenkt werden – wie vor allem bei langsamen Systemen eingesetzt –, oder es werden zwei orthogonal drehbare stehende Spiegel nahe beieinander aufgestellt, über die der Laserstrahl reflektiert wird. Die beiden Plan- bzw. Polygonspiegel werden dann von je einem Galvanometerantrieb oder Elektromotor angetrieben. Zweidimensionale Scanköpfe für Hochleistungslaser spielen in der Materialbearbeitung eine wesentliche Rolle. Zweidimensionale Scanköpfe für Laser niedriger Leistung sind wesentliche Bestandteile von Konfokalmikroskopen.
Für einfache Showzwecke werden oft Planspiegel leicht verkippt auf einer Motorwelle montiert, sodass sich mit dem Lichtpunkt Lissajous-Figuren und Kardioiden erzeugen lassen.
Es gibt auch Laserscanner, bei denen eine zusätzliche Feder und entsprechende Ansteuerung für eine resonante Drehschwingung sorgen. Solche resonanten Laserscanner findet man sowohl in eindimensionaler als auch in zweidimensionaler Ausführung, in Barcodelesegeräten sowie in Spezialanwendungen in der Drucktechnik oder Raumfahrt.
Zudem existieren Scanköpfe zum dreidimensionalen Lasermarkieren, die neben den zwei Spiegeln für X- und Y-Achse noch eine verstellbare Optik für die Tiefe, also die Z-Achse besitzen. Damit ist es möglich, den Laser auch in der dritten Dimension anzusteuern. Der Laserfokus kann dann in allen drei Raumdimensionen frei positioniert werden.
Viele Laserscanner erlauben zusätzlich die Veränderung der Laserintensität.
Bei Laserprojektoren werden drei Laserstrahlen mit den drei Grundfarben rot, grün und blau in einem gemeinsamen Strahlengang über die zwei Ablenkspiegel geführt.
Mikrospiegelfelder werden in modernen Videoprojektoren eingesetzt und arbeiten prinzipiell wie viele einzelne kleine Laserscanner.
Schwenkspiegel
Viele kommerzielle Airborne-Laserscanning-Systeme nutzen die Technik des oszillierenden bzw. schwenkbaren Spiegels, in der der Laserstrahl durch diesen Schwenkspiegel gesteuert wird. Dabei werden Punktdaten in beide Richtungen des Scans erzeugt. Daraus resultiert ein Zick-Zack-Abtastmuster auf dem Grund. Der Punktabstand der Laserpunkte innerhalb der Scanlinie variiert dabei, weil der Spiegel ständig beschleunigt und verlangsamt wird. Dabei finden sich die größten Punktabstände in der Mitte der Scanlinie und die kleinsten Punkteabstände am Ende, da sich dort die Spiegelrichtung wieder ändert. Einer der Vorteile diese Scanner ist, dass der Abtastwinkel variabel ist (zwischen 0° und 75°) und dass auch die Abtastgeschwindigkeit variabel ist (von 0 bis 100 Hz). Scanwinkel, Abtastgeschwindigkeit, Flughöhe und Laserimpulsfrequenz bestimmen den maximalen Punktabstand. Dadurch kann der Scanner so gesteuert werden, dass er einen bevorzugten Abstand der Laserpunkte auf dem Grund beibehalten kann. Im Allgemeinen arbeiten solche Systeme von 100 m bis 6000 m über Grund. Auf Grund ihrer Flexibilität, können Airborne-Laserscanner mit einem Schwenkspiegel gut für unterschiedliche Einsatzanforderungen konfiguriert werden.[1]
Rotierender Polygonspiegel
In Rotationsspiegelsystemen wird ein rotierender Polygonspiegel zu Strahlenablenkung verwendet. Die Datenpunkte werden nur in einer Scanrichtung erzeugt. Die Scanlinien verlaufen parallel und, im Vergleich zum oszillierenden Spiegelsystem, zeigt sich hier ein gleichmäßig verteiltes Punktmuster auf dem Grund. Die Systeme mit rotierendem Polygonspiegel haben einen Scanwinkel zwischen etwa 30° und 60°.[1]
Palmer-Scanner
Die Spiegelvorrichtung, die den Laserstrahl ablenkt, ist so konstruiert, dass die Spiegelfläche und die Rotationsachse einen Winkel bilden, der ungleich 90° ist. Diese Scansysteme werde vorwiegend in terrestrischen Laserscannern verwendet. Im Falle von Airbournesystemen ergibt sich hier ein elliptisches Scanmuster auf dem Grund.[1]
Glasfaserscanner
Im Fall des Glasfaserscanners werden einzelne Laserimpulse vom Spiegel in anschließende benachbarte Glasfasern geleitet. Ein Vorteil dieses Scanmechanismus ist, dass er äußerst stabil ist, weil die Glasfasern während der Herstellung verklebt werden. Auch der Abtastwinkel wird bereits bei der Herstellung endgültig festgelegt. So eine typische Konstruktion hat 128 Glasfasern und einen Winkel von 14°. Diese Konfiguration erzeugt auf der Oberfläche einen unterschiedlichen Punktabstand.[1]
Prismenscanner
Mittels zwei axial drehbarer Prismen, sogenannten Risley-Prismen, können ebenfalls Laserstrahlen zweidimensional abgelenkt werden. Prismenscanner werden derzeit nur für wenige spezielle Anwendungen im militärischen Bereich eingesetzt.
Andere Technologien
Es gibt noch einige weitere Effekte, die das kontrollierte Ablenken eines Laserstrahls ermöglichen. Wichtige Beispiele sind akustooptische Deflektoren und elektrooptische Deflektoren. Diese Scanmethoden erreichen derzeit die höchsten Ablenkgeschwindigkeiten, sind aber auch deutlich teurer als Spiegel- oder Prismenscanner, und ermöglichen nur sehr viel kleinere Scanwinkelbereiche.
Flash-LiDAR
ist eine Erweiterung zum sequentiellen Scanning mit entweder einer Ansammlung von LEDs oder Laserdioden. Die Demodulation des zurückkehrenden Lichtes wird mit einer externen elektro-optischen Vorrichtung geregelt. Dies kann durch gesteuerte Mikrokanalplatten oder durch speziell designte CMOS-Chips geschehen. Im Gegensatz zu anderen Scannern wird hier sofort ein komplettes 3D-Bild erzeugt. Der Nachteil der Flash-LiDAR-Systeme im Vergleich zu anderen Scansystemen ist, dass Flash-LiDAR-Systeme nur über eine sehr begrenzte räumliche Auflösung und Reichweite verfügen, was mit der Ausbreitung der Impulsenergie über ein größeres Sichtfeld zusammenhängt.[1]
Lichtquellen
In der 3D-Bildgebung werden zwei Arten von Lichtquellen verwendet: inkohärente Lichtquellen (Glühlampen, lumineszierendes- oder Sonnenlicht) und Laser (Gas, Festkörper oder Halbleiter), wobei das Licht, das durch den Laser erzeugt wird, monochromatischer, gerichteter, heller und räumlich zusammenhängender ist als das anderer Lichtquellen. Diese räumliche Kohärenz ermöglicht es dem Laser, konzentriert zu bleiben, wenn er auf eine Fläche projiziert wird. Diese hohe räumliche Kohärenz hat aber leider zur Folge, dass sogenannte Speckle erzeugt werden, wenn eine raue Oberfläche mit dieser Laserquelle beleuchtet wird. Kompakte Laser für 3D-Messsysteme sind zurzeit für eine Vielzahl von unterschiedlichen Wellenlängen erhältlich.[1]
Laserstrahlausbreitung
Für das Verständnis vieler optischer Systeme und deren Einschränkungen ist es wichtig, die Manipulation und die Verwendung von Laserstrahlen mittels der Gauß-Strahlen zu verstehen. Diese sind eine Lösung der Maxwell-Gleichungen. Wegen der Beugung kann auch, in den besten laseremittierenden Bedingungen, die Kollimation mit dem Abstand nicht aufrechterhalten werden. Geometrische Optik kann zur Analyse von Laserscannern verwendet werden, aber auch der Gauß-Strahl muss mit einbezogen werden. Die räumliche Auflösung ist abhängig von der Strahlenqualität und seinen Eigenschaften. Auch mit einer hohen Abtastrate, die durch optische Scanmechanismen gegeben ist, ist die Auflösung durch die Beugung begrenzt.[1]
Photodetektoren
Jede Implementierung eines Laser-Scanners erfordert einen spezifischen Sensor, um das reflektierte Laserlicht zu sammeln. Traditionelle Fotosensoren für TOF-Systeme sind Pin-Photodioden, Avalanche-Photodioden und Photomultiplier. Die ersten beiden Sensoren sind Photovoltaikdetektoren. Die Avalanche-Photodioden und die Pin-Photodioden benutzen innere photoelektrische Effekte, während die Photomultiplier äußere photoelektrische Effekte verwenden. Fortschritte in CMOS-(Complementary Metal Oxide Semiconductor)-Architektur und der Gerätetechnik haben neue Sensoren hervorgebracht, die Photodioden-Arrays darstellen, um das Signal auf Pro-Pixel-Basis zu verarbeiten. Dies sind die Basissensoren für Flash-LiDAR, wo in einem Bereich die Bilder simultan erfasst werden.[1]
Ausbreitungsmedium und Oberflächeneffekte
Laserlicht muss zu einem Objekt und wieder zurück durch ein Übertragungsmedium (Luft, Wasser, Vakuum usw.) reisen. Im Falle der TOF-Systeme ist eine Korrektur im Berechnungsindex in Bezug auf ein Vakuum erforderlich. Diese liegt in der Größenordnung von 300 ppm. Solche Korrekturen können bereits im Kalibrierungsverfahren vorgenommen werden. Bei großen Flughöhen will man vielleicht auch die Temperaturgradienten zwischen der Flughöhe und dem Grund betrachten; für die Genauigkeitsanforderungen im Airborne-Laserscanning ist jedoch die durchschnittliche Luft- und Bodentemperatur und die Druckmessung in der Regel ausreichend. Die Stärke eines Impulsechos charakterisiert das Reflexionsvermögen des beleuchteten Fleckes auf dem Boden. Erweiterte Systeme erfassen die Amplitude (oft auch als „Intensität“ bezeichnet) von jedem der ankommenden Echos als 8- oder 16-Bit-Werte. Die Intensitätsbilder sehen aus wie Schwarz-Weiß-Fotografien, obwohl sie nur die relative Reflexivität von Objekten bei einer spezifischen Wellenlänge des Lasers zeigen. Ein Amplitudenbild als ergänzende Information zu den reinen 3D-Daten könnte zum Beispiel helfen, einzelne Objekte zu identifizieren, die sonst nur durch die Höhendaten schwer zu erkennen wären. Abhängig von der Oberfläche kommt es entweder zu einer gerichteten Reflexion, zu einer diffusen Reflexion oder zu einer Mischung von beiden. Ein Echo von einer wenig reflektierenden Oberfläche hat eine geringere Amplitude, als eine Reflexion von einer hoch reflektierenden Oberfläche.[1]
Neben der Reflexivität hat auch die Form einer Oberfläche einen Effekt auf das zurückkommende Echo. Das Reflexionsvermögen des beleuchteten Fleckes am Boden bestimmt nicht nur die Präzision und die Zuverlässigkeit der Abstandsmessungen, sondern auch den maximalen Arbeitsbereich. In der Regel geben die Hersteller von Laserscannern an, für welche spezifischen Ziele (Reflexivität, diffuse- oder gerichtete Reflexion) die angegebene maximale Reichweite gültig ist. Auch künstliche und natürliche Lichtquellen haben einen Einfluss auf den Scanner.[1]
Die zugrunde liegende Hypothese der aktiven optischen geometrischen Messung ist, dass die gemessene Oberfläche undurchsichtig, diffus reflektierend und gleichmäßig ist, und dass die Umgebung neben der Oberfläche, die gemessen wird, keine Störsignale erzeugt. Das heißt, dass nicht alle Materialien einwandfrei gemessen werden können. Marmor, zum Beispiel, weist eine Transluzenz und eine Inhomogenität auf, was zu einer Verzerrung in der Entfernungsmessung führt. Die Qualität von 3D-Daten kann auch nachlassen, wenn der Laserstrahl Objekte mit starken Diskontinuitäten, wie Kanten oder Löcher, kreuzt.[1]
Unterscheidungen und Anwendungsgebiete
Lidar
Lidar (englisch light detection and ranging) ist eine dem Radar verwandte Methode zur optischen Abstands- und Geschwindigkeitsmessung sowie zur Fernmessung atmosphärischer Parameter. Es ist eine Form des dreidimensionalen Laserscanning. Statt der Radiowellen wie beim Radar werden Laserstrahlen verwendet. Lidar wird zur Erstellung hochauflösender Landkarten mit Anwendungen in den Bereichen Vermessung, Geodäsie, Geomatik, Archäologie, Geographie, Geologie, Geomorphologie, Seismologie, Meteorologie, Forstwirtschaft und Airborne Laserscanning verwendet. Die Technologie wird auch in der Steuerung und Navigation autonomer Fahrzeuge verwendet.
Airborne Laserscanning
Airborne Laserscanning, kurz ALS, beziehungsweise die Laseraltimetrie ist eine Methode der Geodäsie, bei der eine Topografie mittels punktweiser Entfernungsmessungen erfasst wird. Dieses Verfahren dient im Allgemeinen zur Erfassung von Geländehöhen und Objekten auf dem Gelände und ersetzt zunehmend die klassische Photogrammetrie. Die Sensorik operiert von Flugzeugen oder Hubschraubern aus.
Komponenten eines Airborne-Laserscanners
Die Komponenten, aus denen ein Airborne-Laserscanner besteht, sind Scanner, flugzeuggetragene GPS-Antenne, Kontroll- und Datenspeicherungseinheit, Anwenderlaptop sowie das Flugmanagement-System. Der Scanner befindet sich im Flugzeugrumpf und sendet während des Fluges Laserimpulse aus. Abhängig von der Fluggeschwindigkeit sowie von der Flughöhe können Messdichten von 0,2 bis 50 Punkte/m² erreicht werden. Moderne Laserscanner sind mit einer Rollenkompensation ausgestattet. Dadurch überlappen sich die Flugstreifen, wodurch eine lückenlose Aufnahme der überflogenen Fläche möglich ist. Die GPS-Antenne befindet sich auf der Oberseite des Flugzeugs. Dadurch ist ein ungestörter Empfang der GPS-Satellitensignale möglich. Die Kontroll- und Datenspeichereinheit ist verantwortlich für die zeitliche Synchronisation und Kontrolle über das gesamte System. Hier werden die Entfernungs- und Positionsdaten, die durch den Scanner, das INS sowie das GPS aufgenommen wurden, gespeichert. Bei modernen Scannern, die 300.000 Laserimpulse pro Sekunde aussenden, können in einer Stunde mehr als 20 Gigabyte an Daten entstehen. Nur 0,1 Gigabyte pro Stunde entstehen durch das GPS oder das INS. Der Anwenderlaptop kommuniziert mit der Kontroll- und Datenspeichereinheit. Er ist für richtige Anwendung der Auftragsparameter sowie für die richtigen Systemeinstellungen während der Aufnahmen verantwortlich. Das Flugmanagement-System dient dem Piloten zur Orientierung. Hier werden Hilfestellungen geboten, um die vordefinierten Flugstreifen einzuhalten.
Für eine korrekte Georeferenzierung der Entfernungsmessung ist es erforderlich, dass Position und Orientierung des Sensors im Raum zum Zeitpunkt der Messung bekannt sind. Im Falle des luftgestützten Laserscanning wird dazu eine Kombination aus mindestens einem GPS-Empfänger und inertialem Navigationssystem (INS) verwendet. Hierbei ist es wichtig, dass die verschiedenen Messwerte der unterschiedlichen Sensoren synchron ermittelt oder über geeignete Verfahren zumindest synchronisiert werden können. Beim luftgestützten Laserscanning lassen sich gemäß Herstellerangaben bzw. Dienstleistungsunternehmen unter günstigen Bedingungen (vegetationslose Flächen, schwache bis mittlere Geländeneigung) Genauigkeiten in der Höhe von 5–15 cm und in der Lage von 30–50 cm erreichen. Mittels geeigneter Verfahren lassen sich dann aus den Daten der Entfernungsmessung und der Komponente GPS/INS dreidimensionale kartesische Koordinaten der gemessenen Punkte ableiten.
Messungen mittels Airborne-Laserscanner
Bei der Ermittlung der Entfernung zum zu erfassenden Objekt können unterschiedliche Messprinzipien zum Einsatz kommen. Verfahren unter Ausnutzung der Lichtlaufzeit nutzen einzelne, kurze Laserpulse, die vom Objekt reflektierte Strahlung wird per Sensor registriert. Die Zeit zwischen ausgesandten und empfangenen Pulsen ist ein Maß für die Entfernung zwischen der Sende- und Empfangseinheit. Alternativ kann eine Pulsfolge mit fester Frequenz ausgesandt und ihre Reflexion am zu vermessenden Objekt detektiert werden. Die Phasendifferenz zwischen ausgesandter und empfangener Pulsfolge ist ebenfalls ein Maß für die Entfernung.
Airborne-Laserscanner für Landaufnahmen arbeiten mit Wellenlängen zwischen 800 und 1550 Nanometer (Infrarot), deren Spektralweite bei 0,1 bis 0,5 Nanometer liegt. Die Art, wie ein Objekt die Laserstrahlen reflektiert, ist abhängig von der Wellenlänge und dem Lasersystem. So ist bei der Verwendung eines Lasers, dessen Wellenlängen nahe dem sichtbaren Teil des Spektrums liegen, die Absorption von Wasser hoch. Dadurch können Wasserflächen bei solchen Aufnahmen nur schwer ausgewertet werden. Eis und Schnee absorbieren stark ab einer Wellenlänge über 1550 Nanometer und können somit schwer in den Aufnahmen erkannt werden, weshalb je nach Fragestellung darauf geachtet werden muss, mit welcher Wellenlänge der Laser angewandt wird. Zudem muss bei der Verwendung eines Laserscanners auch darauf geachtet werden, dass der Laser nicht schädlich für das menschliche Auge ist, da bei Befliegungen nicht auszuschließen ist, dass sich Personen auf der Fläche befinden, die durch den Laser abgetastet wird.
Die von dem Laser abgetastete Oberfläche und auch deren Form sind dafür verantwortlich, wie stark das ausgesendete Lasersignal reflektiert wird. Trifft der Laser auf eine glatte Oberfläche auf, wird ein Echo reflektiert. Die Ausprägung der Wellenform ist ähnlich jener des ausgesendeten Signals. Wenn das ausgesandte Lasersignal beispielsweise auf den Teil eines Hausdaches und den Boden daneben auftrifft, entstehen zwei Echos, die reflektiert werden, ein Echo vom Boden und eines vom Haus. Da die zwei Echos unterschiedliche Wellenformen haben, werden diese vollständig in einer Wellenempfangseinheit gespeichert. Durch die Speicherung der Informationen eines zurückgesendeten Echos lassen sich Informationen über das Ziel der Untersuchung erhalten.
Airborne-Laserscanning mittels Drohnen
Eine weitere Form des Laserscannings ist das Laserscanning mittels Drohnen oder UAS (Unmanned Aerial Vehicle Systems) genannt. Da Drohnen eine weitaus geringere Flughöhe als flugzeuggestützte Laserscanner haben, sind sehr detailgetreue Aufnahmen mit einer Auflösung im Zentimeterbereich möglich. Diese Art des Laserscannings ist auch besonders kostensparend, da der Aufwand um einiges geringer ist. Ein weiterer Vorteil dieser Art des Laserscannings ist, dass man der Drohne ihre Flugroute vorab einspeichern kann, wodurch diese dann den Aufnahmeflug automatisch absolviert.[2]
Mittels Drohnen lassen sich bis zu 150 Hektar automatisiert vermessen. Die Objekte der Vermessung können Felder und Landschaften, Bau- und Planungsgebiete, Tagebauten, Hochspannungsleitungen, Waldkanten und Begrünungsstreifen, Straßenkreuzungen und Straßenverläufe sowie Fluss- und Bachverläufe inkl. Flussbett sein.
Zur Navigation ist eine Drohne mit einer GNSS(Globales Navigationssatellitensystem)-Einheit ausgestattet. Neben der GNSS-Einheit besitzt die Drohne auch einen LiDAR-Sensor, den eigentlichen Laser; dieser muss jedoch an die Tragkraft der Drohne angepasst werden. Zusätzlich besitzt die Drohne noch eine Kontrolleinheit sowie hochauflösende Kameras.[3]
Terrestrisches Laserscanning

Beim terrestrischen Laserscanning, kurz TLS, wird die Oberflächengeometrie von Gegenständen mittels Pulslaufzeit, Phasendifferenz im Vergleich zu einer Referenz oder durch Triangulation von Laserstrahlen digital erfasst. Dabei entsteht eine diskrete Menge von Abtastpunkten, die als Punktwolke bezeichnet wird. Die Koordinaten der gemessenen Punkte werden aus den Winkeln und der Entfernung in Bezug zum Ursprung (Gerätestandort) ermittelt.
Im Gegensatz zur luftgestützten Anwendung kann bei TLS von statischen Aufnahmesituationen ausgegangen werden. Mit fortschreitender Technik werden TLS-Systeme aber auch zunehmend auf mobilen Plattformen (Kfz, Schiff, Zug) installiert, um großräumige linienhafte Strukturen, wie Lichtraumprofile einer Eisenbahntrasse, zu erfassen. In diesem Falle spricht man zunehmend von kinematischem terrestrischen Laserscanning (k-TLS) bis hin zu Mobile-Mapping-Systemen, wie sie beispielsweise für die Datenerfassung bei Google Street View zum Einsatz kommen.
Eine weitere Untergliederung ermöglicht die dimensionale Betrachtungsweise für 2D- und 3D-Anwendungen.
Beim 2D-Laserscanning wird die Kontur von Gegenständen auf einer Ebene digital erfasst. In Sicherheitssystemen wird 2D-Laserscanning als berührungslos wirkende Schutzeinrichtung benutzt, um zu erkennen, ob Personen oder Gegenstände definierte (Gefahren-)Bereiche überschreiten, um dann entsprechende Maßnahmen einleiten zu können (z. B. Abschaltung von Maschinen). Vorteile gegenüber dem Lichtvorhang sind vor allem die Programmierbarkeit des abzusichernden Schutzfeldes und die Absicherung eines großen Bereiches von einem einzelnen relativ kleinen Gerät aus. Nachteilig ist die gegenüber Lichtvorhängen derzeit geringere rechnerische Auflösung, die einen größeren Sicherheitsabstand zur Gefahrenstelle bedingt. 2D-Laserscanner werden auch eingesetzt, um Objekte automatisch zu erkennen, so zum Beispiel auf den Lkw-Maut-Kontrollbrücken auf deutschen Autobahnen. Weitere Anwendungsgebiete sind die Erstellung von Karten in der Robotik sowie die Erkennung von Hindernissen bei autonomen mobilen Robotern.

Das 3D-Laserscanning liefert als Ergebnis dreidimensionale Punktwolken und somit ein vollständiges Abbild der Messszene. Anhand der Punktwolke werden entweder Einzelmaße wie z. B. Längen und Winkel bestimmt, oder es wird aus ihr eine geschlossene Oberfläche aus Dreiecken konstruiert (Vermaschung oder Meshing) und z. B. in der 3D-Computergrafik zur Visualisierung verwendet.[4][5]
Der Einsatz des terrestrischen 3D-Laserscanning umfasst zahlreiche Gebiete der Bestandsaufnahme und beginnt in der Architekturvermessung mit Schwerpunkten in der Bauforschung und Denkmalpflege. Verformte und beschädigte Bauwerke mit räumlich komplizierten Strukturen können im Groben schnell erfasst werden. Je komplexer die Gebäudestruktur jedoch ist, umso mehr Verschattungen weisen die einzelnen Scans auf und sind somit unvollständig, was nur durch weitere Messstandpunkte zu beheben ist. Bei möblierten Gebäuden (dies ist der Standardfall in der Denkmalpflege) sind die Scanergebnisse nur bedingt auswertbar. Weitere Anwendungsgebiete sind beispielsweise der Rohrleitungs- und Anlagenbau, die Archäologie, der Denkmalschutz, Reverse-Engineering und Qualitätssicherung sowie der Tunnelbau, die Forensik und die Unfallforschung.
Moderne Lasermesssysteme erreichen eine Punktgenauigkeit von bis zu einem Millimeter. Ein Laserscanner, dessen Entfernungsbestimmung nach dem Impuls- oder Phasenmessverfahren funktioniert, speichert zusätzlich den Reflexionsgrad des Laserlichtes ab. In Kombination mit einer (u. U. externen) Digitalkamera können die Punktwolken zudem mit fotorealistischen Texturen versehen werden. Im Bereich der Laserscanner, die nach dem Phasendifferenzverfahren (Phasenmessverfahren) arbeiten, wurden in den letzten Jahren enorme Fortschritte insbesondere in Hinblick auf die Abtastrate erzielt. So erreichen aktuelle Geräte Messgeschwindigkeiten von über 1 Mio. 3D-Messpunkten pro Sekunde (1 MHz). Dabei wird, im Gegensatz zum Impulslaufzeitverfahren, ein kontinuierlicher Laserstrahl ausgesandt. Die Amplitude des ausgesandten Laserstrahls wird mit mehreren sinusförmigen Wellen unterschiedlicher Wellenlänge moduliert. Der entstehende zeitliche Abstand des empfangenen Signals gegenüber dem gesendeten Signal ist eine Folge der Entfernung zum Objekt. Bei gleichzeitiger Betrachtung der Phasenlage des gesendeten und des empfangenen Signals ergibt sich eine Phasendifferenz, die die Bestimmung des Objektabstandes erlaubt.
Handgeführte 3D-Laserscanner
Zunehmend finden auch handgeführte (handheld) 3D-Laserscanner Verbreitung. Sie gestatten einen sehr flexiblen Einsatz, haben aber eine geringere Reichweite als terrestrische Laserscanner, da sie empfindlicher auf störende Umgebungseinflüsse wie beispielsweise helles Licht reagieren.
Anwendungsgebiete
Handgeführte 3D-Laserscanner werden heutzutage nicht mehr nur im Einzelhandel zur Ablesung des Barcodes verwendet, sondern finden auch in anderen Einsatzgebieten wie beispielsweise im Maschinenbau, in der medizinischen oder biomechanischen Forschung, bei der Rekonstruktion von Autounfällen, bei Vermessungen im Ingenieurs- oder Bauwesen oder bei Sanierungs- bzw. Restaurierungsprojekten Anwendung. Hierbei wird der Scanner zusammen mit einem Tablet verwendet und bietet Echtzeitvisualisierung der Punktewolkendaten während des Scanvorganges. Dabei ist es möglich, dass der Scanner aus einer Entfernung von bis zu drei Metern bis zu 88.000 Punkte/Sekunde mit einer Genauigkeit von unter 1,5 mm erfasst. Ein optisches Messsystem mit Selbstkompensation ermöglicht dabei das sofortige Scannen ohne Aufwärmphase.
Anwendungsbeispiele
Architektur und Innenausbau
- Vermessung komplexer Strukturen und Objekte
- Projektaufsicht
- Überwachung von Abweichungen
- Qualitätssicherung
- Ergänzung zu Focus3D-Scans bei größeren Projekten
Restaurierung und 3D-Modellierung
- Überwachung des Baufortschritts
- Erfassung des Baubestandes
- Inspektion von Freiformbauteilen
- Verformungskontrolle
- Rekonstruktion
- Restaurierung und Konservierung
Bauwesen und Objektmanagement
- Bestandsdokumentation
- Planung baulicher Veränderungen
- Neuplanung technischer Modifikationen
Forensik
- Tatortermittlung und Analyse
- digitale Beweissammlung
- Prozessintegration
- Verfügbarkeit
- Brandursachenermittlung
Unfallrekonstruktion
- Ermittlung und Analyse der Ursache von Verkehrsunfällen
- passive Fahrzeugsicherheit
- Rekonstruktion von Kollisionen
- digitale Beweissammlung
- digitale Verfügbarkeit
Funktionsweise
Bei einem Abstand von 0,5 bis 3 Metern können mit Handlesescannern Objekte und deren Umgebung aus unterschiedlichen Winkeln und Farben aufgenommen werden. Bereits während des Scans ist es möglich, die erfassten Bereiche auf einem angeschlossenen Tablet zu verfolgen. Auf diese Weise können bei der Datenerfassung keine Informationen verlorengehen. Die erfassten 3D-Daten (Punktwolken) werden auf einer SD-Karte gespeichert, die eine Datenübertragung auf einen PC für die weitere Verarbeitung ermöglicht. Die soeben aufgenommenen Punktwolken können anschließend mit verschiedenen Programmen bearbeitet werden. Zudem können die Daten für die Nutzung in einem CAD-System exportiert werden, die erhaltenen Punktwolken mit anderen Punktwolken zusammengeführt oder online geteilt werden.
Workflow
Als Erstes wird der gewünschte Bereich erfasst, indem der Scanner gestartet und auf das zu scannende Objekt gerichtet wird. Mittels Knopfdruck erfasst der Scanner alles, was sich in seinem Sichtfeld befindet, und speichert die Punktwolke auf ein Speichermedium ab, damit die Datenübertragung auf einen PC zur weiteren Verarbeitung möglich ist. Anschließend kann die Punktwolke in diversen Programmen (z. B. RiSCAN, Faro Scene, PointCap …) bearbeitet und mit anderen Punktwolken kombiniert werden. Um bereits verarbeitete Scan-Ergebnisse zu teilen, können diese beispielsweise mittels WebCloud geteilt werden.
Konfokales Laserscanning
Konfokales Laserscanning ist ein spezielles dreidimensionales Laserscanning-Verfahren, das in der Mikroskopie (siehe Laser-Scanning-Mikroskop und Augenspiegelung) eingesetzt wird. 1957 meldete Marvin Minsky ein Patent an, in dem erstmals das grundlegende Prinzip der Konfokalmikroskopie beschrieben wird. Aber es dauerte noch weitere 30 Jahre und die Entwicklung des Lasers als Lichtquelle, bis die Konfokalmikroskopie zu einer Standard-Mikroskopietechnik wurde.
Übliche Mikroskope ermöglichen durch eine zweistufige, vergrößernde Abbildung eine Detailbetrachtung eines Objekts. Bei dieser Abbildung weist die Optik des Mikroskops eine endliche Tiefenschärfe auf. Das heißt, das Bild des Objekts ist eine Überlagerung aus einer scharfen Abbildung der Punkte in der Fokalebene und einer unscharfen Abbildung von Punkten außerhalb der Fokalebene, die aber von dem Detektor (Auge, Kamerazeile) noch als „scharf“ erkannt werden. Diese Tiefenschärfe verhindert eine Auflösung von Objektdetails in axialer Richtung. Die konfokale Abbildung reduziert diesen Tiefenschärfebereich extrem und ermöglicht auch in axialer Richtung virtuelle optische Schnitte durch das Objekt mit entsprechenden Detailinformationen.[6]
Das Prinzip des konfokalen Laserscannings beruht auf einer Punkt-zu-Punkt-Abbildung, wobei ein fokussierter Laserstrahl eine Probe sequenziell Punkt für Punkt und Zeile für Zeile gescannt (in der Mikroskopie wird manchmal stattdessen das Objekt selbst bewegt) und das zurückfallende Licht hinter einer kleinen Punktblende detektiert wird, um ein Bild zu erstellen. Die Pixel-Informationen werden zu einem Bild zusammengefügt. So werden optische Schnitte der Probe mit hohem Kontrast und hoher Auflösung in x-, y- und z-Richtung abgebildet. Durch die Anordnung der Blende wird nur Licht aus der Brennebene detektiert, und man erhält ein Schnittbild nur aus dieser Ebene. Wie dick diese Ebene ist, hängt von der Schärfentiefe des verwendeten Mikroskops ab. Ändert man zwischen einzelnen Aufnahmen die Fokussierung, so kann man einen ganzen Bildstapel aufnehmen und erhält so einen 3D-Datensatz (siehe auch Konfokalmikroskop). Es gibt zwei Grundtypen von Konfokalmikroskopen, die sich in der Art der Rasterung in der x-y-Ebene unterscheiden: konfokale Laser-Rastermikroskope und konfokale Mikroskope mit rotierender Scheibe.[7]
Materialbearbeitung und Fertigung
Ist die Laserleistung ausreichend groß, kann die gescannte Oberfläche bearbeitet werden. Laserscanner werden insbesondere zum Gravieren, Schweißen und Härten eingesetzt. Auch beim Rapid Prototyping können Laserscanningverfahren zum Einsatz kommen, zum Beispiel, um einen Prototyp mit dem sogenannten Lasersinterverfahren aus lokal durch Lasererwärmung gesinterten Pulverschichten aufzubauen. Stereolithografiemaschinen nutzen Laserscanner, um flüssigen Kunststoff selektiv zu härten und dadurch dreidimensionale Kunststoffteile aufzubauen. Auch Laserbeschrifter und Maschinen zur Bearbeitung von Augenlinsen – zur Korrektur von Fehlsichtigkeit – setzen Laserscanner ein. Ein weiteres Anwendungsgebiet ist die Glasinnengravur.
Barcodeleser
Viele Barcodeleser setzen Laserscanner ein. Mehr hierzu unter Barcodeleser.
Siehe auch
Literatur
- E. Heritage: 3D laser scanning for heritage. Advice and guidance to users on laser scanning in archaeology and architecture. 2011. (historicengland.org.uk)
- G. Heritage, A. Large (Hrsg.): Laser scanning for the environmental sciences. John Wiley & Sons, 2009, ISBN 978-1-4051-5717-9.
- M. Maltamo, E. Næsset, J. Vauhkonen: Forestry Applications of Airborne Laser Scanning: Concepts and Case Studies. (= Managing forest ecosystems. Vol. 27). Springer Science & Business Media, 2014, ISBN 978-94-017-8662-1.
- J. Shan, C. K. Toth (Hrsg.): Topographic laser ranging and scanning: principles and processing. CRC press, 2008, ISBN 978-1-4200-5142-1.
- G. Vosselman, H. G. Maas (Hrsg.): Airborne and terrestrial laser scanning. Whittles Publishing, 2010, ISBN 978-1-4398-2798-7.
Weblinks
- Abbildende Laseraltimetrie
- Laserscanning – eine neue Methode der Stadtvermessung. Laserscanning-Flug mit einem zweisitzigen Leichtflugzeug der Diamond Airborne Sensing GmbH für die MA41-Stadtvermessung über Wien. Flugaufnahmen Zeggl GmbH 2007 für PID Wien. Aufrufbar: Video 2:33. – Unter jeder Tragfläche eine Apparategondel.
Einzelnachweise
- George Vosselman, Hans-Gerd Maas: Airborne and terrestrial laser scanning. Whittles Publishing, 2012, ISBN 978-1-904445-87-6.
- Punktwolken von Drohnen auswerten (UAV – Unmanned Aerial Vehicle). Abgerufen am 16. Februar 2016.
- RIEGL RiCOPTER with VUX-SYS. (Nicht mehr online verfügbar.) Archiviert vom Original am 31. Januar 2016; abgerufen am 16. Februar 2016.
- C. Teutsch: Model-based Analysis and Evaluation of Point Sets from Optical 3D Laser Scanners. (= Magdeburger Schriften zur Visualisierung. Band 1). Shaker Verlag, 2007, ISBN 978-3-8322-6775-9.
- C. Fröhlich: Aktive Erzeugung korrespondierender Tiefen- und Reflektivitätsbilder und ihre Nutzung zur Umgebungserfassung, Pro Universitate Verlag, 1996, ISBN 3-930747-91-X.
- Konfokale Scanning-Mikroskope. Abgerufen am 16. Februar 2016.
- Konfokalmikroskopie: Oberflächen zerstörungsfrei und hochauflösend messen. (Nicht mehr online verfügbar.) Archiviert vom Original am 2. Februar 2016; abgerufen am 16. Februar 2016.