Spannungstensor
Ein Spannungstensor ist ein Tensor zweiter Stufe, der den Spannungszustand in einem bestimmten Punkt innerhalb der Materie beschreibt. Er ist eine wesentliche Größe der Kontinuumsmechanik, in der er bei der Formulierung physikalischer Gesetze auftritt. Eine Kraft wird über Stoffschluss von Körpern durch ein sie ausfüllendes Spannungstensorfeld übertragen, das den Kraftfluss im Körper darstellt. Die Leistung des Spannungstensors an Verzerrungsgeschwindigkeiten trägt zur Energiebilanz bei.
Der Spannungstensor fasst die Normalspannungen in Normalenrichtung, sowie tangential wirkende (transversale) Scherspannungen zu einem mathematischen Objekt zusammen. Die Komponenten des Spannungstensors haben die Dimension M L−1 T −2 also Kraft pro Fläche, für die in der Festkörpermechanik die Einheiten Megapascal (MPa) und Newton pro Quadratmillimeter (N/mm²) üblich sind. Eingeführt wurde der Spannungstensor von Augustin-Louis Cauchy.
Verwendet wird dieser Tensor vor allem in der Physik (Festkörperphysik, Strömungsmechanik und klassische Mechanik, teilweise Geophysik) und in der Elektrodynamik.
Definition
Spannungstensoren können in zwei Gruppen eingeteilt werden:
- Spannungstensoren, die in der Impulsbilanz eingesetzt werden und
- Spannungstensoren, die in der Materialtheorie eingesetzt werden.
Der Cauchy’sche Spannungstensor gehört beiden Gruppen an und ist das am meisten benutzte Spannungsmaß. Er wird oftmals ohne Namenszusatz einfach nur Spannungstensor genannt. Die Spannungstensoren können alle jederzeit und überall ineinander umgerechnet werden, weswegen alle Spannungstensoren physikalisch gleich relevant sind. Sie sind in verschiedenen Kontexten lediglich mehr oder weniger praktisch in der Anwendung. Die Formelzeichen für die Spannungstensoren sind in der Literatur nicht einheitlich. Bei kleinen Verzerrungen braucht nicht zwischen diesen Spannungstensoren unterschieden zu werden. Die Spannungstensoren sind objektive, bezugssysteminvariante Tensoren, d. h. zwei verschiedene Beobachter nehmen die Spannungstensoren immer in gleicher Weise wahr.

Spannungstensoren, die in der Impulsbilanz eingesetzt werden
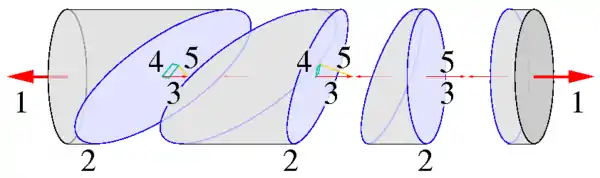
In einer gedachten Schnittfläche durch die Materie übt die in Gedanken weggeschnittene Materie dem Schnittprinzip folgend auf die verbliebene Materie eine Spannung aus, die sich als Cauchy’scher Spannungsvektor (auch Traktionsvektor genannt) aus einer Normalspannungskomponente (rechtwinklig zur Schnittfläche wirkend) und zwei Schubspannungskomponenten (in der Schnittfläche wirkend) zusammensetzt, die von der Ausrichtung der Fläche abhängen, siehe Bilder.




Am jeweiligen Ort schneiden sich drei solche gedachten Schnittflächen mit den Basiseinheitsvektoren des Koordinatensystems als Normalen, siehe den freigeschnittenen Würfel im Bild. Die drei Spannungsvektoren in den drei Schnittflächen definieren den dortigen Spannungszustand vollständig und werden zeilenweise zum Spannungstensor zusammengefasst:


Dabei bezeichnet das dyadische Produkt (Tensorprodukt zweier Vektoren). Die Wahl des Koordinatensystems ist dabei ohne Belang, denn als Tensor ist der Spannungstensor koordinatenunabhängig. Mit dem so definierten Spannungstensor berechnet man den Spannungsvektor an einer infinitesimalen Schnittfläche mit dem Normalenvektor gemäß:



Die Transposition „( · )T“ ist der Bedeutung der Indizes der Komponenten geschuldet. Zu Ehren seines Urhebers wird dieser Tensor auch Cauchy’scher Spannungstensor genannt, der sich aus den „wahren“ oder „aktuellen“ Spannungen zusammensetzt. Er ist auf Grund des zweiten Cauchy-Euler’schen Bewegungsgesetzes (Drehimpulsbilanz) symmetrisch und wird in der Euler’schen Betrachtungsweise benutzt.
Bei der Umrechnung der Spannungsvektoren von der räumlichen Euler’schen in die materielle Lagrange’sche Darstellung muss die Änderung der Oberflächenelemente berücksichtigt werden. Darin ist F der Deformationsgradient, FT−1 die Inverse seiner Transponierten und det(F) seine Determinante. Die Normaleneinheitsvektoren und sind genauso wie die Differentiale da und dA in der räumlichen bzw. der materiellen Darstellung definiert. Damit lautet ein „Oberflächenkraftelement“:



Darin ist N der Nennspannungstensor (englisch nominal stress), der die Spannungen bezogen auf die Ausgangsfläche repräsentiert, und P ist der erste Piola-Kirchhoff'sche Spannungstensor. Diese beiden Tensoren sind im Allgemeinen unsymmetrisch, aber die Produkte F · N und P · FT müssen symmetrisch sein, siehe #Drehimpulsbilanz oder zweites Cauchy-Euler’sches Bewegungsgesetz
Weitere in der Materialtheorie eingesetzte Spannungstensoren
Beim Spannungstensor handelt es sich um ein Tensorfeld, das an jedem materiellen oder räumlichen Punkt innerhalb eines Körpers definiert ist. Erstere materielle Sichtweise entspricht der Lagrange’schen Darstellung und letztere räumliche der Euler’schen Darstellung. Beide Betrachtungsweisen definieren mehrere Spannungstensoren:
- Den räumlichen Cauchy’schen Spannungstensor
- Den räumlichen gewichteten Cauchy’schen oder Kirchhoff’schen Spannungstensor , der in der Metall-Plastizität angewendet wird, wo die plastische Inkompressibilität J konstant gehalten wird,
- Den materiellen zweiten Piola-Kirchhoff’schen Spannungstensor , der beispielsweise bei der Cauchy-Elastizität angewendet wird,
- Den materiellen konvektiven Spannungstensor[1]
- Viskoser Spannungstensor in fließenden Medien




Darin ist F der Deformationsgradient, F−1 seine Inverse, FT−1 die Inverse der Transponierten und J = det(F) seine Determinante. Diese Spannungstensoren sind auf Grund der Drehimpulsbilanz symmetrisch. Die Benutzung dieser Tensoren wird im Abschnitt #Energiebilanz vorgestellt.
Umrechnung der Spannungstensoren ineinander
Die Tabelle fasst die Umrechnung der Tensoren zusammen.









































Darin ist F der Deformationsgradient, F−1 seine Inverse, FT−1 seine transponiert Inverse, J = det(F) seine Determinante und C = FT · F der rechte-Cauchy-Green-Tensor.
Schreibweisen
In Matrizenschreibweise wird ein Spannungstensor in folgenden, üblichen Formen angegeben:

Manchmal, wie in der linken Matrizenschreibweise, wird der Index der Normalspannungskomponente nur einfach notiert (wie in σx = σxx), denn bei ihr ist Normalen- und Wirkrichtung gleich. Es muss jedoch gewährleistet sein, dass eine Verwechselung mit den Hauptspannungen (σ1,2,3 oder σI,II,III) ausgeschlossen ist.
Die symmetrischen Spannungstensoren, insbesondere der Cauchy’sche Spannungstensor, bestehen nicht aus neun unabhängigen Größen, sondern nur aus sechs und können in der Voigt’schen Notation als ein 6×1-Vektor geschrieben werden, wodurch die Notation deutlich vereinfacht wird:

Eigenschaften der symmetrischen Spannungstensoren
Für Matrizen wie für Spannungstensoren sind Eigenwerte σi und Eigenvektoren bedeutsam, die das Eigenwertproblem


lösen. Die Eigenwerte sind bezugssysteminvariant, aber es gibt noch weitere Invarianten (die aus den drei Eigenwerten ableitbar sind), die für die Beurteilung des Spannungszustands geeignet sind.
Bei den symmetrischen Spannungstensoren sind die Eigenwerte sämtlich reell und die Eigenvektoren paarweise senkrecht oder orthogonalisierbar.
Hauptspannungen und maximale Schnittspannungen
Die Eigenwerte werden Hauptspannungen und die (auf die Länge eins normierten und deshalb mit Hut geschriebenen) Eigenvektoren Hauptspannungsrichtungen genannt, siehe Hauptspannung und Hauptspannungsrichtung. In den Hauptspannungsrichtungen gibt es nur Normalspannungen und keine Schubspannungen.
Die Eigenwerte ergeben sich aus der charakteristischen Gleichung

worin die Koeffizienten für die Hauptinvarianten

stehen und die Komponenten die Spannungskomponenten im kartesischen xyz-System sind. Der Operator „Sp“ bildet die Spur, „det“ die Determinante und 1 ist der Einheitstensor.

Die Hauptspannungsrichtungen sind paarweise senkrecht zueinander oder orthogonalisierbar und bilden somit eine Orthonormalbasis. In diesem Basissystem besitzt der Spannungstensor Diagonalgestalt:

Die Beträge der Schnittspannungsvektoren

nehmen in zwei der drei Hauptspannungsrichtungen Extremwerte an.

| Beweis |
|---|
| Weil die Wurzelfunktion monoton mit ihrem Argument wächst, kann einfacher nach den Extremwerten der Betragsquadrate gesucht werden:
Darin ist λ ein Lagrange’scher Multiplikator für die Nebenbedingung Im Extremum ist und daher wie gewünscht Des Weiteren verschwindet die Richtungsableitung in allen Richtungen weshalb der Vektor in den runden Klammern der Nullvektor ist und folgt. Demnach ist Eigenvektor von und diese Vektoren stimmen mit den Eigenvektoren von überein wegen |








Üblicherweise sind die Hauptspannungen σI, II, III so benannt, dass σI ≥ σII ≥ σIII gilt. Dann liegt in der I-Richtung der betraglich größte und in III-Richtung der betraglich kleinste Schnittspannungsvektor.
Maximale Schubspannungen
Die maximalen Schubspannungen treten in einer Ebene e auf, die senkrecht zu einer Hauptspannungsrichtung ist. Der Mohr’sche Spannungskreis zeigt, dass die maximale Schubspannung im 45°-Winkel zu den Hauptspannungsrichtungen in der Ebene e vorkommt und betraglich gleich der halben Differenz der entsprechenden Hauptspannungen ist. Damit resultiert für die maximale Schubspannung:

Falls σI = σIII ist, befindet sich der materielle Punkt unter hydrostatischem Zug/Druck und in keiner Ebene finden sich Schubspannungen.
Ist die 1-3-Ebene die xy-Ebene und in ihr ein ebener Spannungszustand (σx, σy, τxy) gegeben, dann lautet die maximale Schubspannung

| Beweis |
|---|
| Eine Herleitung der maximalen Schubspannungen gelingt durch Extraktion der Schubspannungen aus dem Spannungstensor über
Die Basiseinheitsvektoren gehen durch Drehungen aus Basiseinheitsvektoren einer beliebigen Orthonormalbasis hervor und es ist diejenige Drehung gesucht, die stationär werden lässt. Drehungen werden mit orthogonalen Tensoren Q dargestellt, die die Eigenschaften Q · QT = 1 mit dem Einheitstensor 1 aufweisen. Sei also . Dann soll stationär werden unter der Nebenbedingung Q · QT = 1. Der Doppelpunkt „:“ bildet das Frobenius-Skalarprodukt zweier Tensoren A und B mittels der Spur A : B := Sp(AT · B). Die Nebenbedingung wird mit einem tensoriellen Lagrange’schen Multiplikator L in der Zielfunktion berücksichtigt: Stationarität tritt ein, wenn die Richtungsableitungen in allen Richtungen H für beide Argumente der Zielfunktion verschwinden. Wenn in allen Richtungen H gilt, dann ist wie gewünscht die Nebenbedingung notwendig erfüllt. Für die Variation des orthogonalen Tensors errechnet sich unter Ausnutzung der Eigenschaften des Skalarprodukts Weil H beliebig ist und Q vollen Rang hat, verschwindet der Tensor in den eckigen Klammern, und weil der Tensor B symmetrisch ist, ist es der Tensor A ebenfalls. Im 123-System zeigt sich Also ist τ13 = τ32 = 0, σ11 = σ22 und bei einem symmetrischen Spannungstensor folgt: Damit ist Eigenvektor des Spannungstensors. Sei , sodass Q um die z-Richtung dreht. Dann berechnet sich mit dem Drehwinkel φ, den Winkelfunktionen sin und cos und ihren Doppelwinkelfunktionen: Aus der letzten Bedingung und den Doppelwinkelfunktionen resultiert der Tangens des doppelten Drehwinkels woraus sich schließlich mit den gegenseitigen Darstellungen der Winkelfunktionen die maximale Schubspannung ermittelt zu Die letzte Form mit den Hauptspannungen σI,II ergibt sich aus im ebenen Spannungszustand. |

















Invarianten
Wenn der Spannungstensor bei einem Wechsel des Basissystems wie in

bezüglich eines anderen Basissystems ausgedrückt wird, dann ändern sich seine Komponenten von nach in charakteristischer Weise, so wie sich auch die Komponenten eines geometrischen Vektors beim Wechsel des Basissystems ändern. Der Betrag des Vektors ändert sich dabei aber nicht und genauso gibt es beim Spannungstensor sogenannte Invarianten, die sich bei einem Basiswechsel nicht ändern. Solche invarianten oder objektiven Größen sind in der Materialtheorie von Interesse, denn jedwedes Material verhält sich bezugssysteminvariant. Invariant sind:



- die Hauptinvarianten
- die Hauptspannungen
- die Spuren der Potenzen
- der Betrag
- die Invarianten
des Spannungsdeviators und - die Haigh–Westergaard-Koordinaten[2]






siehe Abschnitt Eigensystem. Darin sind der Spannungsdeviator, die mittlere Normalspannung und der Lodewinkel. Der Doppelpunkt „:“ bildet das Frobenius-Skalarprodukt zweier Tensoren A und B mittels der Spur A : B := Sp(AT · B). Von diesen Invarianten sind aber nur drei voneinander unabhängig und aus denen können dann alle anderen abgeleitet werden. Insbesondere gilt nach dem Satz von Vieta:




Die von Mises Vergleichsspannung

ist eine Funktion der zweiten Hauptinvariante des Spannungsdeviators, weswegen sie auf hydrostatische Spannungen (gleich große Normalspannungen in allen drei Raumrichtungen) nicht reagiert.
Zusammenhang mit anderen Größen
Der Cauchy’sche Spannungstensor beinhaltet die „wahren“ oder „aktuellen“ Spannungen im deformierten Körper (in der Momentankonfiguration). Diese Spannungen stehen mit dem Druck im Körper, der auf ihn wirkenden Kraft und seinen Verformungen im Zusammenhang.
Der Maxwell’sche Spannungstensor aus der Elektrodynamik ist eine Untermatrix des Energie-Impuls-Tensors.
Druck
Der Druck in einem Material ist der negative Mittelwert der Normalspannungen

und weil die Spur eine Invariante ist, ist der Druck bezugssysteminvariant. Für die mittlere Normalspannung sind noch die Formelzeichen σm und σH gebräuchlich. Der Kugelanteil des Spannungstensors wird Drucktensor genannt:[3]

Für die Divergenz des Drucktensors gilt nach der Produktregel:

Darin bildet grad den Gradienten.
Insbesondere bei Flüssigkeiten und Gasen ist der Druck und der Drucktensor bedeutsam.
Bei Flüssigkeiten liegt oftmals (in guter Näherung) Inkompressibilität vor. Hier ist der Druck eine „Zwangsspannung“, die als Reaktion der Flüssigkeit auf Kompressionsversuche die Inkompressibilität aufrechterhält. Mathematisch ist der Druck hier ein Lagrange’scher Multiplikator für die Nebenbedingung „Inkompressibilität.“ Inkompressibilität kommt auch in Festkörpern vor, wo der Druck dann dieselbe Rolle spielt wie in inkompressiblen Fluiden. Bei Festkörpern kann auch negativer Druck auftreten.
Kraft
In der Realität und der Kontinuumsmechanik werden Kräfte, die auf einen Körper wirken, immer flächig eingeleitet, d. h. auf einen Teil aσ der Oberfläche a mit Normalenvektor wirken Spannungsvektoren auf den Körper:


Mit der Vereinbarung, dass auf dem Rest der Oberfläche Nullspannungsvektoren wirken ( auf a \ aσ), und wenn die Oberfläche hinreichend glatt ist, kann diese Beziehung mit dem Divergenzsatz umgeformt werden:


Darin ist v das Volumen des Körpers und div der Divergenzoperator.
Eine von außen einwirkende Kraft induziert im Körper ein Spannungstensorfeld, das den ganzen Körper ausfüllt.
Diese Tatsache hat mit den Eigenschaften des Körpers zunächst nichts zu tun: Das Tensorfeld existiert in Starrkörpern, Festkörpern, Flüssigkeiten und Gasen, sofern sie als Kontinuum modelliert sind. Nach obiger Gleichung kann die Divergenz des Spannungstensors als „spezifische Kraft“ (Kraft pro Volumen) angesehen werden, um zu unterstreichen, dass der Spannungstensor am materiellen Punkt ein eingeprägter Einfluss ist.
Die Kraft wird den Körper deformieren und/oder in Bewegung versetzen, was auf die Spannungen aber auch auf die Kraft selbst zurückwirkt, siehe auch den Abschnitt #Berechnung der Spannungen unten.
Verzerrungstensor
Ein mit Kräften belasteter und mit Spannungen beanspruchter Körper wird in Bewegung versetzt und/oder verformt, siehe #Berechnung der Spannungen unten. Beides hängt von den Materialeigenschaften ab, ersteres vorrangig von der Dichte. Bezüglich der Materialeigenschaften sind zwei Materialgruppen voneinander zu unterscheiden: Die Flüssigkeiten und Gase, die zusammen als Fluide bezeichnet werden, und die Festkörper.
Fluide zeichnen sich unter anderem dadurch aus, dass sie isotrop sind und im mechanischen Gleichgewicht keine Schubspannungen übertragen können. Im Gleichgewicht ist der Spannungstensor also ein Drucktensor, siehe oben. Festkörper vermögen im Gleichgewicht sowohl Schubspannungen als auch unixialem und biaxialem Zug/Druck standzuhalten. Bei Festkörpern kann der Spannungstensor demnach im Gleichgewicht voll besetzt sein.
In der Modellvorstellung der Kontinuumsmechanik erzeugen Materialien bei Verformung eine Reaktionsspannung, die der Deformation entgegenwirkt. Die von außen eingeleitete Spannung infolge einer Belastung wird vom Material übertragen und muss jederzeit und überall im Gleichgewicht mit der vom Material entgegen gebrachten Reaktionsspannung sein. Die Materialtheorie beschäftigt sich mit dem Zusammenhang zwischen dem Spannungstensor und der Verformung, die mit dem Green-Lagrange’schen Verzerrungstensor E bemessen wird. Das allgemeinste Materialmodell eines einfachen Materials, das per definitionem deterministisch, lokal und objektiv ist, lautet:[4]

Darin ist ein tensorwertiges Funktional, t die Zeit, τ ein Zeitparameter und ein materieller Punkt. Die explizite Abhängigkeit des Funktionals vom materiellen Punkt liegt an möglicherweise örtlich wie zeitlich variierenden Materialeigenschaften. Der Index τ ≤ t symbolisiert, dass die gesamte vergangene Geschichte des materiellen Punkts und die in ihm stattgefundenen Verzerrungen in den Wert des Funktionals eingehen kann, so wie es beispielsweise bei der Warmumformung eines Metalls der Fall ist.


Physikalischer Kontext
Dieser Abschnitt handelt vom Einsatz des Spannungstensors in physikalischen Gesetzen und der Technik.
Impulsbilanz
Eine Kraft, die auf einen realen Körper wirkt und wie oben gezeigt mit dem Spannungstensor ausgedrückt werden kann, wird den Körper nach dem Gesetz „Kraft gleich Masse mal Beschleunigung“ in Bewegung versetzen. Dieses Gesetz wird auch Impulsbilanz genannt.
Wenn aus einem Körper ein (infinitesimal) kleiner Teilkörper freigeschnitten wird und dessen Oberfläche gegen null gehen gelassen wird, folgt aus der Impulsbilanz, dass der Zusammenhang zwischen dem Normalenvektor an eine Schnittfläche und dem Schnittspannungsvektor linear sein muss, da der Spannungszustand homogen ist, wenn die betrachtete Fläche gegen Null geht, da Spannungszustände üblicherweise stetig sind. Das ist die Aussage des Cauchy’schen Fundamentaltheorems, mit dem Augustin-Louis Cauchy den Spannungstensor als linearen Operator zwischen den Normalenvektoren und den Schnittspannungsvektoren einführte.
Das Volumen eines (infinitesimal) kleinen Körpers geht schneller gegen null als seine Oberfläche, weswegen Masseneffekte bei obiger Betrachtung vernachlässigt werden konnten. Geht nun das Volumen des Teilkörpers gegen null, dann folgt das erste Cauchy-Euler’sche Bewegungsgesetz.
Cauchysches Fundamentaltheorem
Wird ein (infinitesimal) kleiner Tetraeder mit Kantenlänge L aus einem belasteten Körper herausgeschnitten, dann übt die in Gedanken weggeschnittene Materie auf jeder Schnittfläche Spannungen aus, die über ihre Angriffsfläche nach dem Gesetz „Kraft gleich Masse mal Beschleunigung“ den Tetraeder beschleunigen. Weil die Masse eines kleiner werdenden Tetraeders mit L³ gegen null geht, seine Oberfläche aber nur mit L², können bei L → 0 Masseneffekte vernachlässigt werden und müssen die flächenverteilten Kräfte im Gleichgewicht sein. Das ist genau dann der Fall, wenn der Zusammenhang zwischen den Normalenvektoren und den Schnittspannungsvektoren linear ist:

Darin ist
- der Schnittspannungsvektor an einer Fläche mit Normalenvektor ,
- ein Faktor, Normalenvektoren und ein Normaleneinheitsvektor,
- der Spannungstensor, seine Transponierte,
- sind die Komponenten des Spannungstensors, die des Spannungsvektors und die des Normaleneinheitsvektors bezüglich eines kartesischen Koordinatensystems und
- „·“ ist das Skalarprodukt von Vektoren.







Das ist die Aussage des Cauchy’schen Fundamentaltheorems. Die Benutzung eines Tensors stellt sicher, dass obige Zusammenhänge koordinatenunabhängig sind.
In der räumlichen Darstellung betrifft besagtes den Cauchy'schen Spannungstensor und in der materiellen Darstellung den Nennspannungstensor.
Erstes Cauchy-Euler’sches Bewegungsgesetz
Betrachtet wird ein freigeschnittener Quader in einem Körper, der einer Schwerebeschleunigung unterliegt, siehe Bild. Die Schnittspannungen an Schnittebenen mit Normalen in positiver Koordinatenrichtung sind am positiven Schnittufer und die Schnittspannungen an Schnittebenen mit Normalen in negativer Koordinatenrichtung sind am negativen Schnittufer und wirken in entgegengesetzter Richtung zu ersteren. Zwischen positivem und negativem Schnittufer liegt eine (infinitesimal) kleine Distanz über die sich die Schnittspannungen ändern können. Bei einem (infinitesimal) kleinen Quader können die Schnittspannungen als über die Flächen des Quaders, die Dichte, die Beschleunigung und die Schwerebeschleunigung als über das Volumen konstant angenommen werden. Bilanzierung der Kräfte am Quader mit Kantenlängen dx1, dx2 und dx3 in 1-, 2- bzw. 3-Richtung liefert nach dem Gesetz „Kraft gleich Masse mal Beschleunigung“ in i-Richtung


für i=1,2,3. Darin ist die Beschleunigung und die Schwerebeschleunigung in i-Richtung und ρ ist die Dichte des Quaders. Division durch das Volumen dx1 dx2 dx3 führt im Grenzgang dx1,2,3 → 0 auf



Dies ist die i-te Komponente der Vektorgleichung

in einem kartesischen Koordinatensystem wie im Bild. Diese Vektorgleichung ist das erste Cauchy-Euler’sche Bewegungsgesetz, das die lokale Form der Impulsbilanz ist, die, wenn sie in jedem Punkt eines Körpers erfüllt ist, sicherstellt, dass die Bewegung des Körpers als Ganzes – inklusive Verformungen – der Impulsbilanz gehorcht.
Die Herleitung hier basiert auf kleinen Verschiebungen. Die Effekte großer Verschiebungen sind im Hauptartikel nachzuschlagen.
Drehimpulsbilanz oder zweites Cauchy-Euler’sches Bewegungsgesetz
Das zweite Cauchy-Euler’sche Bewegungsgesetz ist die Anwendung des Drallsatzes auf ein Kontinuum. Von außen angreifende Drehmomente ändern den Drehimpuls des Körpers. Der Anteil, der die Bahndrehimpulse seiner Partikel betrifft, entfällt auf Grund der Impulsbilanz. Übrig bleibt ein wirkungsloser Momentenbeitrag, der von Schubspannungen zwischen den Partikeln verrichtet wird, und damit dieser Beitrag verschwindet, muss der Cauchy'sche Spannungstensor in der räumlichen und der zweite Piola-Kirchhoff’sche Spannungstensor in der materiellen Betrachtungsweise symmetrisch sein:

Das ist das zweite Cauchy-Euler’sche Bewegungsgesetz in räumlicher und materieller Formulierung, das die lokale Form der Drehimpulsbilanz ist, die, wenn sie zusammen mit dem ersten Cauchy-Euler’schen Bewegungsgesetz in jedem Punkt eines Körpers erfüllt ist, sicherstellt, dass die Bewegung des Körpers als Ganzes – inklusive Verformungen – der Drehimpulsbilanz gehorcht.
Energiebilanz
Die Spannungstensoren, die in der Materialtheorie benutzt werden, kommen in den physikalischen Gesetzen in Kombination mit Verzerrungsmaßen vor, wie beispielsweise im Prinzip von d’Alembert oder in der Energiebilanz. Letztere soll beispielgebend behandelt werden.
Damit die zur Energiebilanz beitragende spezifische Spannungsleistung bezugsysteminvariant ist, werden in der räumlichen Formulierung die objektiven Zeitableitungen

benötigt, die mit dem Geschwindigkeitsgradient l = Ḟ · F−1 gebildet werden. Der Überpunkt bezeichnet genauso wie unten die materielle Zeitableitung. Mit den Verzerrungstensoren[5]


berechnen sich die objektiven Verzerrungsgeschwindigkeiten

und die spezifische Spannungsleistung

Darin ist ρ0 = ρ det(F) die Dichte des Materials, ρ die Dichte im verformten Körper und der Doppelpunkt „:“ bildet das Frobenius-Skalarprodukt zweier Tensoren A und B mittels A : B := Sp(AT · B). Physikalisch relevant sind auch die inkrementelle Spannungsleistung

und die „Ergänzungsleistung“

In den Klammern stehen die Arbeitsausdrücke

von Spannungen an Dehnungen.
Berechnung der Spannungen
In der Auslegung von Bauteilen ist oftmals aus sicherheitstechnischen Gründen ein Nachweis zu erbringen, dass die Spannungen gewisse Grenzen nicht überschreiten. Relevant sind hier die oben definierte von Mises Vergleichsspannung und die maximale Schubspannung, für die der vollständige Spannungszustand oder Spannungstensor vorzulegen sind. Die physikalischen Gesetze machen keine Aussagen über das Materialverhalten und reichen daher für die Bestimmung des Spannungstensors nicht aus.
Im allgemeinen Fall resultieren die Bewegung und der Spannungszustand aus einem nichtlinearen Zusammenspiel aus Lagerung, eingebrachter Belastung, Bauteil- und Materialeigenschaften. Die Reaktionskräfte in den Lagern und andere Belastungen induzieren ein Spannungstensorfeld, das über ein Materialmodell mit einem Verzerrungstensorfeld verknüpft ist, das sich wiederum aus Bewegungskomponenten ergibt, die den Lagerungen genügen. Das Gleichungssystem aus
- Impulsbilanz und evtl. weiteren physikalischen Gesetzen,
- kinematischen Gleichungen (Lagerungen und Verzerrungszustand) sowie
- konstitutiven Gleichungen (Relation zwischen Spannungen und Verzerrungen)
ist abgeschlossen und führt zur prinzipiellen Vorhersagbarkeit des Spannungs- und Bewegungszustands.
Beispiele
Zugversuch
Bei einachsialem Zug eines geraden prismatischen Stabes in x-Richtung lautet der Spannungstensor

Im statischen Gleichgewicht und in Abwesenheit einer volumenverteilten Kraft liefert die Impulsbilanz die Bedingung

Im statischen Gleichgewicht ist die Normalspannung σ also in x-Richtung konstant. Die Seitenflächen des Stabes sind wegen spannungsfrei.

Biegung des geraden Balkens
Bei der Biegung des geraden Balkens in der x-z-Ebene lautet der Spannungstensor

Im statischen Gleichgewicht und in Abwesenheit einer volumenverteilten Kraft liefert die Impulsbilanz die Bedingung

Also muss auch hier σ in x-Richtung konstant sein und die Seitenflächen des Balkens können bei kleinen Verschiebungen wegen als in guter Näherung spannungsfrei gelten. Siehe auch das Beispiel bei den Kompatibilitätsbedingungen.
Torsion
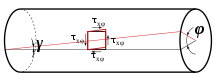
Bei der Torsion des geraden Kreiszylinders um seine Figurenachse, die in Zylinderkoordinaten (r,φ,z) in Richtung der z-Achse liegt, lautet der Spannungstensor

mit einer Schubspannung τ. Im statischen Gleichgewicht und in Abwesenheit einer volumenverteilten Kraft liefert die Impulsbilanz die Bedingung

die erfüllt ist, wenn τ in z- und φ-Richtung konstant ist. Eine Koordinate nach einem Komma im Index bedeutet hier eine Ableitung nach der Koordinate wie in

Die Mantelfläche des Zylinders ist wegen spannungsfrei.

Eigensystem
Der Cauchy’sche Spannungstensor habe die Form

Seine charakteristische Gleichung lautet

die die Lösungen

besitzt. Mit dem Ansatz

bekommt man

mit der Lösung und der Konsequenz


Entsprechend ermittelt man

Die Eigenvektoren sind paarweise senkrecht aufeinander. In dem Basissystem der Eigenvektoren hat der Spannungstensor Diagonalgestalt:

was die Invarianz seiner Spur bestätigt.
Siehe auch
Einzelnachweise
- Bezeichnung nach Haupt (2010), der auf C. Truesdell: Die Nicht-Linearen Feldtheorien der Mechanik. In: S. Flügge (Hrsg.): Handbuch der Physik. Band III/3. Springer, 2013, ISBN 978-3-642-46017-3. verweist.
- N.S. Ottosen, M. Ristinmaa: The Mechanics of Constitutive Modeling. Elsevier, Amsterdam 2005, ISBN 0-08-044606-X, S. 149 f. (google.de [abgerufen am 14. Januar 2017]).
- Brandt, Dahmen: Mechanik: Eine Einführung in Experiment und Theorie. Springer, 2004, S. 326 (springer.com).
- Haupt (2010), S. 283
- Bei Haupt (2010) ist AHaupt = eWikipedia, eHaupt = -AWikipedia und aHaupt = -aWikipedia
Literatur
- Holm Altenbach: Kontinuumsmechanik. Einführung in die materialunabhängigen und materialabhängigen Gleichungen. 2. Auflage. Springer Vieweg, Berlin u. a. 2012, ISBN 978-3-642-24118-5.
- P. Haupt: Continuum Mechanics and Theory of Materials. Springer, 2010, ISBN 978-3-642-07718-0.
- Richard P. Feynman, Robert B. Leighton, Matthew Sands: The Feynman Lectures on Physics. Band 2. Addison-Wesley, Reading, Massachusetts 1964, 31-6 The tensor of stress (englisch, caltech.edu – anschauliche Beschreibung).