Voigtsche Notation
Die Voigtsche Notation, benannt nach dem Physiker Woldemar Voigt, ist eine abkürzende mathematische Schreibweise für bestimmte mathematische Funktionen (symmetrische Tensoren), die eine bestimmte Anzahl von Vektoren auf einen Zahlenwert abbilden. Ausgehend von der Indexnotation für Tensoren werden dabei jeweils 2 Indizes nach einer bestimmten Vorschrift zu einem Index „zusammengezogen“. Ein Tensor zweiter Stufe hat in Anwendungsfällen oft 9 Komponenten, die in einer 3×3-Matrix zusammengefasst werden können:

Ein symmetrischer Tensor hat zwar auch 9 Komponenten – aber nur 6 Bestimmungsstücke, so dass man kürzer schreiben kann:

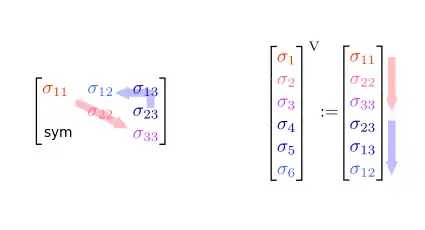
Die 6 Bestimmungsstücke lassen sich statt in einer quadratischen 3×3-Matrix auch in einer 6×1-Spaltenmatrix (Spaltenvektor) anordnen. Während die Elemente der 3×3-Matrix durch zwei Indizes gekennzeichnet sind, sind die Elemente der 6×1-Spaltenmatrix durch genau einen Index gekennzeichnet – so dass zu definieren ist, in welcher Weise die Indizes „zusammengezogen“ werden. Im Bild rechts sieht man die am häufigsten verwendete Zuordnung („Zusammenziehungs“-Regel) zwischen den Indizes des 6×1-Spaltenvektors und den Indizes der 3×3-Matrix.

Die Zusammenfassung der 6 Bestimmungsstücke eines symmetrischen Tensors zu einem 6×1-Spaltenvektor unter Anwendung einer „Zusammenziehungs“-Regel nennt man die Voigtsche Notation (der Komponenten) des Tensors.
Voigtsche Notation in der Elastizitätstheorie
Spannungstensor und Verzerrungstensor
Für den Spannungstensor definiert man:

Die 6×1-Voigt-Matrix ist hier im Artikel durch ein hochgestelltes V gekennzeichnet, und die Komponenten des Voigt-Spaltenvektors haben nur einen Index. Anhand dieser Merkmale lässt sich erkennen, ob für eine Größe die Voigt-Notation verwendet wird oder die klassische Notation. Die Komponenten des Spannungstensors haben in der klassischen Tensor-Notation zwei Indizes, die in der Matrix zusammengefasst werden. Die Zahl der Bestimmungsstücke ist wegen der Symmetrie 6, nämlich . In der Voigt-Notation werden diese Bestimmungsstücke in einem Spaltenvektor angeordnet, und können daher durch nur einen Index adressiert werden. Die 6 Komponenten des Voigtschen Spaltenvektors, nämlich , werden entsprechend der letzten Gleichung (Regel der „Zusammenziehung“) definiert.


Für den Verzerrungstensor wird eine etwas andere „Zusammenziehung“ verwendet, nämlich:

Neu ist der Faktor 2 bei den letzten 3 Komponenten des Voigt-Vektors. Durch diesen Faktor stellt man sicher, dass:

F ist hierbei die Freie Energie.[1]
Farbliche Kennzeichnung: Jeder roten Voigt-Vektor-Komponente wird genau eine Tensorkomponente zugeordnet. Und jeder blauen Voigt-Vektor-Komponente werden genau zwei Tensorkomponenten zugeordnet, also ist z. B.:

Steifigkeit
Wenn die Komponenten eines Tensors 4. Stufe im (i,j)-Indexpaar und im (k,l)-Indexpaar symmetrisch sind, lässt sich das vordere und das hintere Indexpaar mit derselben Index-„Zusammenziehung“ behandeln wie bei einem Tensor 2. Stufe. Die 3×3×3×3=81 Tensorkomponenten lassen sich dann einer 6×6-Voigt-Matrix zuordnen. Der Index, der aus dem vorderen Indexpaar entstanden ist, wird dabei der erste Index der 6×6-Matrix, so dass:


Jeder roten Voigt-Matrix-Komponente wird damit genau eine Tensorkomponente zugeordnet. Jeder blauen Voigt-Matrix-Komponente werden genau zwei Tensorkomponenten zugeordnet. Und jeder schwarzen Voigt-Matrix-Komponente werden genau vier Tensorkomponenten zugeordnet. Z. B.:

Es gibt 9 rote, 18 blaue und 9 schwarze (insgesamt 36) Voigt-Matrix-Komponenten. Und alle 3×3×3×3=81 Tensorkomponenten werden zugeordnet, denn:

Materialgesetz
Das Materialgesetz in der linearen Elastizitätstheorie ist eine lineare Abbildung zwischen Verzerrung und Spannung. In der Tensorschreibweise ist dies ein Tensor 4. Stufe, der die Tensoren 2. Stufe verknüpft.

Hierbei wird die Einsteinsche Summenkonvention verwendet. Eine dieser 9 Gleichungen lautet beispielsweise

In der Voigtschen Notation ist die entsprechende Abbildung eine 6×6 Matrix.

Aus der Forderung der Äquivalenz der beiden Schreibweisen ergibt sich der Zusammenhang für die Komponenten:

Für die Schreibweise mit 4 Indizes wird Symmetrie in den ersten und letzten beiden Indizes vorausgesetzt, also . Dies ist wegen der Symmetrie der Tensoren für Verzerrung und Spannung ohne Einschränkung der Allgemeinheit möglich und üblich. Wegen der Existenz eines Potentials ist symmetrisch, und für die Tensorschreibweise gilt äquivalent, dass ist. D. h., es gilt:




Nachgiebigkeit
Geht man anstelle von C von der Nachgiebigkeit S aus gemäß

und fordert man dieselben Symmetrien für S, die zuvor für C gefordert wurden, so gelangt man zu folgender Darstellung der Nachgiebigkeit in Voigtscher Notation

Vergleich der Tensorschreibweise mit der Voigt-Notation
Vor- und Nachteile der Voigt-Notation
Die Voigt-Notation ist deutlich kompakter als die vollständige Tensornotation und die Voigtsche Steifigkeitsmatrix lässt sich leicht invertieren. Des Weiteren ist leicht erkennbar, dass ein lineares Materialgesetz (für das die Symmetrien von C gelten) im Allgemeinen 21 unabhängige Werte (Material-Konstanten) enthält. Wenn C noch weitere Bedingungen/Symmetrien erfüllt, reduziert sich die Anzahl der Konstanten weiter.
Diesen Vorteilen stehen einige Nachteile gegenüber: Es sind auch andere „Zusammenziehungsvorschriften“ möglich, z. B. könnte auch sein: . Die Voigtsche Notation ist lediglich die gebräuchlichste Form. oder sind keine (weder ko- noch kontravariante) Vektoren. Sie transformieren sich bei Koordinatenwechsel also auch nicht wie Vektoren. Dasselbe gilt für Objekte in Voigt-Notation, die mehrere Indizes haben. Würde man z. B. die „Vektoren“ in Voigt-Notation als Vektoren auffassen und auf dem zugehörigen Vektorraum eine Norm wie üblich definieren, dann müsste man feststellen, dass im Allgemeinen gilt




- wobei rechts die übliche Norm auf dem Vektorraum der 3×3-Matrizen gemeint ist.

Äquivalenz der Schreibweisen
Die Voigtsche Notation ist äquivalent zur ausführlichen Indexnotation für Tensoren. Genauer gesagt gilt:

Man kann die Äquivalenz beider Schreibweisen leicht zeigen. z. B. ist

Alternative Notationen
Auch andere „Zusammenziehungsvorschriften“ sind möglich. Z. B. ist die nach Nye benannte Notation der Komponenten des Spannungstensors:

Und die Nye-Notation für die Komponenten des Verzerrungstensors ist:

Weitere Notationen sind benannt nach Kelvin (1856)[2][3] und Mandel (1965)[4]. Die Kelvin-Mandel-Notation des Spannungstensors ist:

Diese Notation hat den Vorteil, dass die zugehörige Tensorbasis normiert ist. Beispielsweise gilt bezüglich dieser Notation die Identität

Aufgrund der Normierung der Basis können die üblichen Matrix-Rechenoperationen wie z. B. die Inversion, Eigenwerte auf die Steifigkeits- und Nachgiebigkeitstensoren übertragen werden[5].
Siehe auch
Weiteres zur Spezialfällen der Anisotropie und damit zur Besetztheit der Steifigkeitsmatrix/Nachgiebigkeitsmatrix:
Literatur
- Woldemar Voigt: Lehrbuch der Kristallphysik: mit Ausschluß d. Kristalloptik. Teubner, Leipzig u. a. 1910.
- J. F. Nye: Physical Properties of Crystals: Their Representation by Tensors and Matrices. Oxford University Press, 1985, ISBN 0-19-851165-5.
- I. Müller, P. Strehlow: Rubber and Rubber Balloons, Paradigms of Thermodynamics (= Lect. Notes Phys. Nr. 637). 2004, ISBN 978-3-540-20244-8.
Einzelnachweise
- Näheres hierzu siehe z. B. doi:10.1007/b93853.
- S.C. Cowin und M.M. Mehrabadi: The Structure of Linear Anisotropic Elastic Symmetries (1992), J. Mech. Phys. Solids (40) No. 7 pp. 1459–1471.
- W. Thomson: Elements of a mathematical theory of elasticity (1856), Phil. Trans. R. Soc. (146), 481–498.
- Jean Mandel: Généralisation de la théorie de plasticité de WT Koiter. In: International Journal of Solids and structures. 1, 1965, S. 273–295.
- R. Brannon: Rotation, Reflection, and Frame Changes: Orthogonal tensors in computational engineering mechanics (2018), IOP Publishing Ltd, Kapitel 26