Hilbert-Kurve
In der Mathematik ist die Hilbert-Kurve eine (stetige) Kurve, die, wie in der nebenstehenden animierten Abb. 1 veranschaulicht, als Grenzkurve von Polygonzügen die Fläche eines Quadrats vollständig ausfüllt. Sie ist eine sogenannte FASS-Kurve, somit eine raumfüllende Kurve (engl. space-filling curve, abgekürzt SFC) und wurde 1891 von dem deutschen Mathematiker David Hilbert entdeckt.[1] Die Möglichkeit, mit einer stetigen eindimensionalen Kurve ein zweidimensionales Gebiet komplett abdecken zu können, war den Mathematikern des neunzehnten Jahrhunderts neu (siehe auch Monsterkurve).
Die Hilbert-Kurve wird durch rekursive Iteration definiert und konstruiert. Die -te Rekursionsstufe wird Hilbert-Kurve der -ten Iteration[2], , und der die Teilquadrate verbindende Polygonzug Hilbert-Polygon der -ten Iteration genannt. Die Hilbert-Kurven und die Hilbert-Polygone endlicher Iterationen haben denselben Grenzwert, nämlich die Hilbert-Kurve im engeren Sinn. Die euklidische Länge des Hilbert-Polygons ist , das heißt, sie wächst mit der Nummer der Iteration über alle Grenzen. Die Hilbert-Kurve hat im Limes eine Hausdorff-Dimension von exakt 2, genau wie das Quadrat.




Mithilfe der Hilbert-Kurve endlicher Iteration kann man die Teilquadrate und mithilfe des Limes die Punkte im Quadrat in eine lineare Reihenfolge bringen, die Hilbert-Ordnung genannt wird. Mit ihr lassen sich (effiziente) Verfahren, die auf einer linearen Ordnung beruhen, ins Mehrdimensionale übertragen. Dazu gehört binäres Suchen, binärer Suchbaum, Skip-Liste und andere.
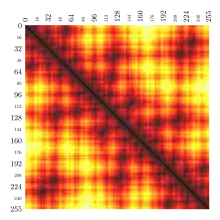
Beim direkten Zugriff steht die Hilbert-Ordnung in Konkurrenz zu einem Zugriff, bei dem die linearen Ordnungen der Dimensionen in unterschiedlicher Rangigkeit zu einer lexikographischen Ordnung hintereinander geschaltet sind – im internen Speicher über ein mehrfach indiziertes Feld resp. im externen Speicher per wahlfreien Zugriff (Random Access). Wenn sich dies gut organisieren lässt, schneidet sie etwas schlechter ab. Sie ist aber überlegen, wenn es sich um eine ungefähre Suche handelt, an die sich eine sequentielle Suche anschließt, bei der Nachbarschaftsbeziehungen (engl. clustering) vorteilhaft ausgenutzt werden können. Dies ist bei -dimensionalen Räumen , bei denen Nachbarschaft durch die euklidische Metrik definiert ist, häufig der Fall – beispielsweise, wenn auf geographische Merkmale eines Objekts über die Schlüssel Länge und Breite zugegriffen werden soll. Die Hilbert-Kurve ist beliebt aufgrund ihrer guten Nachbarschaftserhaltung.[3][4] Bei der Z-Kurve ist die Rechnung geringfügig einfacher, aber die Nachbarschaftserhaltung deutlich schlechter.[5]


Die Zuordnung der Hilbert-Kurve einer (endlichen) -ten Iteration ist umkehrbar und kann zu beliebiger Feinheit gesteigert werden. Dieses und die gute Nachbarschaftserhaltung hat eine Vielfalt von Anwendungen der Hilbert-Kurve in der Informatik eröffnet, so in der Bildverarbeitung, Datendarstellung, im Hochleistungsrechnen[6] und in anderen Gebieten.[7]

Konstruktion
.svg.png.webp) Abb. 3a: 1. Iteration der Hilbert-Kurve
Abb. 3a: 1. Iteration der Hilbert-Kurve.svg.png.webp) Abb. 3b: Hilbert-Kurve der 2. Iteration
Abb. 3b: Hilbert-Kurve der 2. Iteration.svg.png.webp) Abb. 3c: Hilbert-Kurve der 3. Iteration
Abb. 3c: Hilbert-Kurve der 3. Iteration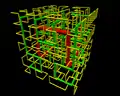 Abb. 3d: 3D-Hilbert-Kurven, 1. bis 3. Iteration
Abb. 3d: 3D-Hilbert-Kurven, 1. bis 3. Iteration



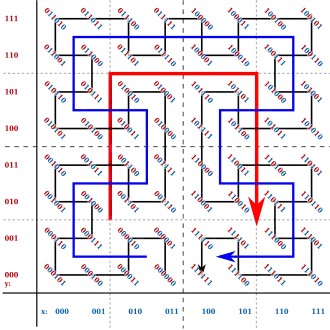
Die Abb. 3a bis 3c aus dem definierenden Artikel[1] zeigen die drei ersten Iterationen der Hilbert-Kurve. Bei der -ten Iteration bringen Nummern die Intervalle (Teilstrecken der Linie oben in den Grafiken) und die Quadrate mit gleichen Nummern zur Entsprechung. Die verstärkten polygonalen Linien bringen genau diese Reihenfolge der Quadrate heraus.[8]

Eine nachfolgende Iteration verfeinert – bei Intervallen wie bei Quadraten – die Schachtelung um den Faktor 4.
Iterationsschritt
Die Konstruktion der Hilbert-Kurve als einer raumfüllenden Kurve

beruht auf einem rekursiven Verfahren:
- Das Verfahren beginnt mit dem (mehrdimensionalen Einheits-Intervall) als dem zu füllenden -dimensionalen Gebiet.
- Jedes Gebiet wird aufgeteilt in kongruente Teilgebiete (-dimensionale Intervalle) der halben Seitenlänge und auf der Eingabeseite ein Intervall in gleichlange Teilintervalle. Das Verfahren überführt damit 1D-Schachtelungen von Intervallen in 2D-Schachtelungen von Quadraten (oder in 3D-Schachtelungen von Würfeln), ist also inklusionserhaltend.[8]
- Für jedes Teilgebiet ist eine raumfüllende Kurve zu finden, die durch verkleinerte Verschiebung, Spiegelung und/oder Rotation der Vorgängerkurve gebildet wird. (Prinzip der Selbstähnlichkeit)[9]
- Die Spiegelungs- und Rotationsoperationen lassen sich so wählen, dass sich die Teilkurven zu einer einzigen gerichteten Kurve zusammenfügen.


Eine Hilbert-Kurve wird wesentlich durch die Reihenfolge charakterisiert, in der die Teilgebiete hintereinander aufgesucht (traversiert) werden. Mit wachsender Dimensionszahl wächst die Anzahl der unterschiedlichen Hilbert-Kurven, die sich dann auch in ihrer Nachbarschaftserhaltung stark unterscheiden können.
Dieser Artikel beschränkt sich fast ausschließlich auf die Dimensionszahl , also auf die Abbildung des Einheitsintervalls auf das Einheitsquadrat . Bei dieser Dimensionszahl treten alle einschlägigen mathematischen Phänomene bereits in Erscheinung.



Während die Hilbert-Kurve (auf der Ausgabeseite) ein „Teilquadrat“ durchläuft (füllt), soll auch der Parameter auf der Eingabeseite das ihm entsprechende Teilintervall durchlaufen. Dies entspricht der Vorgabe, dass die Hilbert-Kurve in allen Bereichen »gleich schnell« voranschreitet.

Um dies sicherzustellen, wird als Intervallschachtelung auf der Parameterseite die („4-adische“) Darstellung von im Quaternärsystem mit gewählt.[10] Es sei gesetzt, so dass




ein Intervall in der -ten Schachtelung des Parameters ist. Auf der Seite des Quadrats (Ausgabeseite) werden die Koordinaten und im Binärsystem („2-adisch“) dargestellt mit . Die (abbrechenden) Koordinaten mit und stehen dabei für das Teilquadrat, das diese Koordinaten zur linken unteren Ecke hat. Und die Folge der durch spezifizierten Quadrate, die die Seitenlänge und die Fläche haben, macht eine 2D-Intervallschachtelung in der Ebene aus. Diese D-Schachtelungen seien als die „Rasterschachtelung“ (der Hilbert-Kurve) bezeichnet.










Die -te Iteration der „Hilbert-Kurve“ ist eine geordnete Folge von an genau einer Quadratseite mit dem Folgequadrat zusammenstoßenden Quadraten (oder deren linken unteren Eckpunkten resp. deren Mittelpunkten). Diese Folge wird am besten durch einen gerichteten Polygonzug von Quadratmittelpunkt

zu Quadratmittelpunkt (Parameter ) verdeutlicht. Dieser Polygonzug enthält alles Wichtige und wird häufig als das Hilbert-Polygon (engl. auch approximating curve[12] und Hilbert pseudo curve) der -ten Iteration bezeichnet (Beispiele finden sich in den Hilbert-Kurven der 1. bis 3. Iteration der obigen Abbildungen).

Polygonzug
Im Folgenden wird gezeigt, wie die Quadrate eines Rasters sämtlich in eine Reihenfolge gebracht werden, derart, dass sie bei wachsendem immer kleiner werden, einander näher rücken und im Limes eine Kurve bilden.


Im Sinn des obigen Programms sei rekursiv angenommen, dass in einem Teilquadrat ein Kurvenpunkt der selbstähnlichen Hilbert-Kurve berechnet ist. Es geht nun darum, diesen Punkt (resp. dieses Teilquadrat) so zu den anderen drei Teilquadraten in das Quadrat zu holen, dass alle solche Punkte zusammen genommen eine zusammenhängende Kurve (resp. eine zusammenhängende Folge von Teilquadraten des Rasters ) ergeben. Eine solche Transformation lässt sich zerlegen in:


die Verkleinerung des Quadrats linear um den Faktor , (Skal) eine (die Hilbert-Kurve charakterisierende) Parallelverschiebung und (Parv) eine Isometrie (= orthogonale Abbildung = Drehung und/oder Spiegelung). (Ausr)

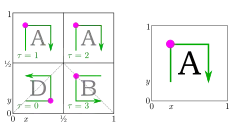
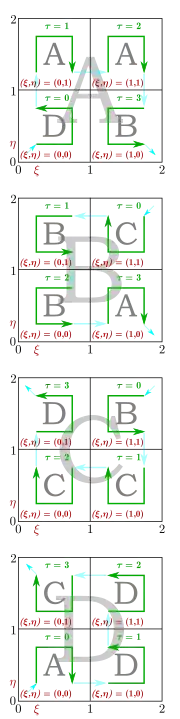
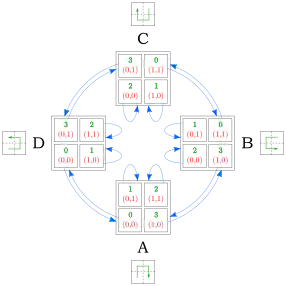
Für die Wahl der passenden Drehungen und/oder Spiegelungen ist die Festlegung hilfreich, wo ein Quadrat einer Rasterschachtelung von der Kurve betreten und wo es verlassen wird. Bei der Hilbert-Kurve sind dies die Ecken genau einer Quadratseite.[13] Da es auch auf die Richtung und Orientierung ankommt, werde dieses Charakteristikum eines Quadrats im Raster mit dem Begriff „Ausrichtung“ (engl. orientation[3], state[14]) versehen und die Ausrichtung „hoch—rechts—runter“ (in Koordinaten resp. die Strecke für „Eintritt links unten—Austritt rechts unten“) mit dem Buchstaben gekennzeichnet.[15]



Aber auch die bloße Platzierung des Teilquadrats hängt von der Ausrichtung ab. Ist das große Quadrat (links in der Abbildung 4) gemäß ausgerichtet, dann wird bei der Hilbert-Kurve das Quadrat abhängig von der Quaternärziffer in eines der vier Teilquadrate platziert, und zwar platziert die Quaternärstelle nach links unten, nach links oben, nach rechts oben und nach rechts unten, also nach dem „Grundmuster“ (engl. base pattern[12] oder basic pattern[16])
![]() .[17][18] Ein Grundmuster für die 3-dimensionale Hilbert-Kurve ist
.[17][18] Ein Grundmuster für die 3-dimensionale Hilbert-Kurve ist ![]() (s. a. den Abschnitt Ausblick auf 3 Dimensionen).
(s. a. den Abschnitt Ausblick auf 3 Dimensionen).





Andere Ausrichtungen (als , und auch Platzierungsmuster) lassen sich durch eine vorgeschaltete Isometrie aus der Diëdergruppe des Quadrats darstellen.

Die zur Herstellung des einfachen Zusammenhangs (und damit der Stetigkeit im Limes) erforderlichen Drehungen und/oder Spiegelungen sind ebenfalls Isometrien aus und zusammen mit der Platzierung auszuführen. Diese Kombination wird im folgenden Abschnitt unter dem Begriff „Transformation“ beschrieben.
Transformation der rekursiven Teilquadrate auf das Einheitsquadrat


Um den Wechsel der Ausrichtung von einer Iteration zur nächsten präzise zu erfassen, sei angenommen, dass beide Quadrate, das große (links in der Abbildung 4) wie das Teilquadrat (rechts) gleich, bspw. gemäß , ausgerichtet sind.
Die benötigten vier Transformationen[19][20] hängen von der Quaternärziffer ab und seien mit und bezeichnet:







Alle Transformationen skalieren zunächst die übergebenen Koordinaten des Punktes mit dem Faktor , da die Teilquadrate die halbe Seitenlänge haben, und enthalten eine Verschiebung in das durch (s. o.) bestimmte Teilquadrat. Zudem ist von einer Transformation je nach Lage ggf. eine (von abhängige) Viertelrotation, Spiegelung, d. h. eine Kongruenzabbildung durchzuführen:



- Bei kommt die Transformation zum Zuge. Sie spiegelt ihr Argument an der »Hauptdiagonalen« (strichpunktiert in Abbildung 4), wodurch sich der Drehsinn des Quadrats ändert. Die Eintrittsecke ins Teilquadrat (links unten) bleibt erhalten.
(Alle Übertritte von einem Quadrat zum nächsten sind in der Abbildung 7 als kurze blaugrüne Pfeile vom Grundmuster des einen Quadrats diagonal zur Austrittsecke und von der Eintrittsecke des anderen Quadrats diagonal zu dessen Grundmuster dargestellt.)
Die Austrittsecke dieses Teilquadrats ist nachher links oben und führt zum nächsten Teilquadrat mit . - Die Zielquadrate bei den Transformationen und haben dieselbe Ausrichtung mit Eintrittsecke links unten und Austrittsecke rechts unten, daher ist keine Spiegelung (und keine Drehung) erforderlich. Jedoch wird die Kurve skaliert in je eines der oberen Teilquadrate verschoben.
verschiebt bei die Kurve um in -Richtung, also ins linke obere Teilquadrat. verschiebt für die Kurve diagonal ins rechte obere Teilquadrat.
Die Eintrittsecke des Teilquadrats mit fällt mit der Austrittsecke von und die Austrittsecke von mit der Eintrittsecke von zusammen. - Die Transformation spiegelt für ihr Argument an der »Nebendiagonalen« (strichpunktiert in Abbildung 4), wodurch sich der Drehsinn des Quadrats ändert. Danach wird das gespiegelte Ergebnis um in -Richtung, also ins rechte untere Teilquadrat verschoben, so dass die Eintrittsecke rechts oben liegt – an der Stelle der Austrittsecke des vorangehenden Teilquadrats mit – und die Austrittsecke mit der Austrittsecke des Ausgangsquadrates übereinstimmt (rechts unten).









Ersichtlich sind die Punkte über die sie enthaltenden Quadrate in eine Reihenfolge gebracht, die der Reihenfolge der Intervalle des Parameters entspricht – sowohl bezüglich der 4 Teilquadrate als auch bei den Anschlüssen zwischen zwei Quadraten .
Dabei findet der Übertritt von einem Quadrat zum nachfolgenden Nachbarquadrat immer nur über eine gemeinsame Quadratseite statt (s. kurze blaugrüne Pfeile in der Abbildung 7), sodass sich beim Polygonzug von Quadratmittelpunkt zu Quadratmittelpunkt ausschließlich Teilstrecken gleicher Länge, der Seitenlänge, ergeben, die alle zu den Koordinatenachsen parallel und miteinander in einer linearen Kette verbunden sind – mit der offensichtlichen Konsequenz, dass die Hilbert-Kurve im Limes stetig ist. Die Teilstrecken des Polygons erfahren dabei nur Richtungswechsel .

Die Abbildung 4 zeigt darüber hinaus, dass ausgehend von der Ausrichtung zwei neue (absolute) Ausrichtungen (:= „rechts—hoch—links“) und (:= „links—runter—rechts“) hinzukommen, und die Abbildungen 7 und 5, dass nur noch eine weitere Ausrichtung (:= „runter—links—hoch“), genannt , fehlt, so dass es bei insgesamt vier Ausrichtungen bleibt. Sie seien im Folgenden in der Menge zusammengefasst. Die zugehörige Gruppe der benötigten Isometrien ist eine Untergruppe der Diedergruppe des Quadrats, wird erzeugt von der Drehung um 180° (Spiegelung am Quadratmittelpunkt) und einer Spiegelung an einer Diagonalen, hat also die Gruppenordnung vier, den Exponenten zwei und ist isomorph zur Kleinschen Vierergruppe.





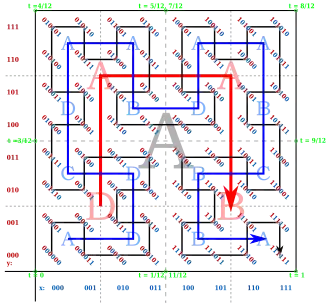
Die Quadratmittelpunkte sind in der Reihenfolge des Hilbert-Index (Schrift gedreht) miteinander verbunden.
Der Hilbert-Index eines Teilquadrates mit Mittelpunkt findet sich am Schnittpunkt von -Spalte mit -Zeile.
(Alle Angaben im Binärsystem)
Blass in den Quadratmitten die „absolute Ausrichtung“.
Bei 8 Punkten der finalen Hilbert-Kurve sind zugehörige Werte des Parameters angegeben (grün).

Der Mittelpunkt des großen (und jedes) Quadrats ist ein Tripelpunkt. Er hat .


In der Abbildung 5 ist das große Quadrat, das Quadrat der -ten Iteration (= Quadrat des Rasters ), gemäß ausgerichtet – und dementsprechend in seiner Mitte gekennzeichnet. Die relativen Ausrichtungen der Quadrate höherer Iterationen sind rekursiv von Iteration zu Iteration den Regeln dieses Abschnitts entsprechend entwickelt und die Ergebnisse als absolute Ausrichtungen im Zentrum der Quadrate eingetragen. Als solche sind sie auf die initiale (absolute) Ausrichtung, hier , des Ausgangsquadrates bezogen. Die absolute Ausrichtung eines Quadrats ist also die Akkumulation (Komposition, Verkettung) der relativen Ausrichtungen aller seiner rekursiven Vorgänger mit der initialen Ausrichtung am Rekursionsanfang.[21]


Bemerkung 1
Weil im vorstehenden Abschnitt das Quadrat der Iteration »zeitlich« vor dem großen Quadrat als »vorhanden« angesehen wird, könnte man anzunehmen versucht sein, dass die (Ausrichtungen der) großen Quadrate (links) der höherwertigen Ziffern durch diejenigen späterer Iterationen (rechts) beeinflusst würden. Das Gegenteil ist jedoch der Fall:
- Die absolute Ausrichtung des großen Quadrats beeinflusst (zusammen mit der Quaternärziffer ) direkt die absolute Ausrichtung des Teilquadrats.

Das kann man übrigens schon beim Zeichnen von Hilbert-Polygonen zweier aufeinander folgender Iterationen feststellen, spielt für die Umkehrbarkeit der (s. Abschnitt #Hilbert-Polygon) eine große Rolle und wirkt sich auf die (Art der) Stetigkeit von (s. Abschnitt #Hilbert-Kurve) aus. Diese Abhängigkeit ist in der tabellarischen Abbildung 7 und im gleichwertigen Übergangsdiagramm der Abbildung 8 für alle vier vorkommenden Varianten (= Ausrichtungen) herausgearbeitet. Eine darauf basierende explizite Rekursionsformel für wird im entsprechenden Abschnitt vorgestellt.

Diskrete Mathematik
In diesem Kapitel wird mit die endliche Iterationsstufe bezeichnet, die Einheitsintervalle und sind oben halboffen, und für , bspw. oder , ist







eine diskrete Menge von Elementen.

Hilbert-Polygon
Die Zuordnung der Hilbert-Kurve der -ten Iteration ist

Das Bild ist eine diskrete Menge, und zwar ist

- .

Die Koordinaten stehen dabei für linke untere Ecken von Quadraten des Rasters . In graphischen Darstellungen wird die Reihenfolge der Quadrate, deretwegen ja der ganze Aufwand getrieben wird, am einfachsten durch Verbindungsstrecken zwischen den Quadraten sichtbar gemacht. Am deutlichsten wird diese Reihenfolge, wenn man statt der Ecken die Quadratmittelpunkte


nimmt, weil die Verbindungsstrecken verschiedener Iterationsstufen dann getrennt bleiben und Symmetrien klarer herauskommen. Dieser Polygonzug in der Ebene von Quadratmittelpunkt zu Quadratmittelpunkt wird häufig als das Hilbert-Polygon der -ten Iteration bezeichnet.[22]
Die diskrete Funktion , d. i. die Einschränkung von auf die diskrete Menge , ist umkehrbar und hat die Umkehrfunktion , die im Abschnitt Hilbert-Index behandelt wird. Nach Konstruktion ist ferner




woraus die Implikation

(und im Limes die gleichmäßige Stetigkeit) folgt.
Das Hilbert-Polygon ist eine einfache Kurve mit Anfang, Ende und ohne Berührungen oder Überschneidungen. Wie in der Einleitung erwähnt, hat es die euklidische Länge , die also mit über alle Grenzen wächst. Alle Hilbert-Polygone derselben Iteration sind einander ähnlich.
Die Animation der nebenstehenden Abb. 6 gibt einen Eindruck, wie lang die Wege in höheren Iterationen werden. Sie deutet auch an, wie das Hilbert-Polygon nach und nach den ganzen Ersten Quadranten der -Ebene ausfüllen könnte: Wenn ein Quadrat fertig ist, dann ist der Polygonzug in der Richtung weg vom Ursprung fortzusetzen.
Die Bild- und die Definitionsmenge von lassen sich aufgrund ihrer Diskretheit in einfacher Weise so skalieren, dass sie ganzzahlig werden.

Bei den beiden folgenden Algorithmen t2xyR und t2xyI und beim Algorithmus xy2tR erfolgt die Auswertung (Hintereinanderausführung) der verketteten Transformationen wie bei Operatoren üblich rechts-assoziativ, also von rechts nach links.[23] Innerhalb des Programms findet die Auswertung im rekursiven Aufstieg – also »auf dem Rückweg« (im hinteren Abschnitt) – statt, weshalb die Auswertungsrichtung als »fein zu grob« zu charakterisieren ist.
Damit sich bei dieser Auswertungsrichtung überhaupt etwas ergibt, muss der »Hinweg« abgebrochen werden.
Beim wie immer gearteten Abbruchkriterium (im Pseudocode t2xyR formuliert mit der Genauigkeitsvariablen eps) wird der Punkt , wie in der Abb. 4 dargestellt, in dasjenige Rasterquadrat gebracht, das dem eingegebenen Teilintervall von entspricht, und dieses Vorgehen wird wiederholt bei jedem iterativen Schritt zurück.
Bemerkung 2
Wie weiter oben schon bemerkt, suggeriert die Abb. 4 eine solche Auswertungsrichtung. Gleichwohl existiert eine Abhängigkeit des -ten Quadrats von Teilen der -sten oder höherer Iterationsstufe überhaupt nicht, weder hinsichtlich der Ziffern (mit ) des Parameters noch hinsichtlich der Ziffern der Koordinaten noch hinsichtlich der Ausrichtung der Quadrate. Wenn es eine Rekursion gibt, dann kann sie in der Richtung von »grob zu fein« aufgesetzt werden, bei der die Auswertung im rekursiven Abstieg erfolgt. Die hieraus hervorgehende Rekursionsformel hat den Vorteil, dass ein »Abbruchkriterium« nicht gebraucht wird. (Ein Ergebnis liegt bei einem Abbruch unmittelbar vor – einschließlich einer Angabe über die möglicherweise eingegangene Ungenauigkeit.) Sie zählt damit zu den potentiell unendlichen Verfahren und wird im Abschnitt #Explizite Rekursionsformel beispielhaft vorgestellt. Der einzige erkennbare Nachteil ist, dass die Eigenschaft der Ausrichtung eines Quadrats explizit gemacht werden muss und nicht in den Formeln für die Transformationen versteckt werden kann.




Rekursiver Algorithmus
Der nachfolgende Pseudocode t2xyR[24] implementiert rekursiv die Abb. 4 mit als Ausrichtung für Zwischen- wie Endergebnis. Er nimmt als Argument einen Parameter und eine Begrenzung eps der Iterationstiefe. Zurückgegeben werden die Koordinaten der linken unteren Ecke eines Quadrates der -ten Iteration.


| Eingabe: | Parameter |
| Ausgabe: | Koordinaten |
| Auswertungsrichtung: | fein zu grob |

function t2xyR(t, eps) begin
if eps > 1 then
return (0, 0); // im Ergebnisquadrat die linke untere Ecke
else
q = floor(4*t);
// Die Quaternärstelle q ∈ {0, 1, 2, 3} bestimmt,
// in welches Teilquadrat der Punkt gehört
// und wie er zu transformieren ist.
r = 4*t − q;
(x,y) = t2xyR(r, eps*2); // r ∈ I ↦ (x,y) ∈ Q
switch q do
case 0: return (y/2, x/2);
case 1: return (x/2, y/2 + 1/2);
case 2: return (x/2 + 1/2, y/2 + 1/2);
case 3: return (1−eps − y/2, 1/2−eps − x/2);
end switch
end if
end function
tabellen vom 4-adischen Parameter zu den zwei 2-adischen Koordinaten


– und zurück.
Pro „Ausrichtung“ eine Tabelle.
Iterativer Algorithmus mit ganzzahligen Ein-/Ausgabewerten
Bei der folgenden iterativen Lösung ist die Nummer der Iteration und die Anzahl der 1D-Teilintervalle. Zurückgegeben wird die linke untere Ecke eines Quadrats.
Der folgende Pseudocode t2xyI hat ganzzahlige Ein-/Ausgabe (d. h. es wird nicht auf Einheitsintervall oder -quadrat skaliert).

| Eingabe: | Parameter |
| Ausgabe: | Koordinaten |
| Auswertungsrichtung: | fein zu grob |


function t2xyI(t, p) begin
(x, y) = (0, 0); // im Ergebnisquadrat die linke untere Ecke
for (m = 1; m < p; m *= 2) do // m wächst exponentiell
rx = 1 & t/2; // Binärziffer[1]: 0=links/1=rechts
ry = 1 & (t ^ rx); // Binärziffer[0]
(x, y) = rot(x, y, rx, ry, m);
x += m * rx;
y += m * ry;
t /= 4; // zur nächsten Quaternärziffer
end for
return (x, y);
end function
// Drehspiegelung eines Quadrates
function rot(x, y, rx, ry, p) begin
if (ry == 0) then
if (rx == 1) then
x = p−1 − x;
y = p−1 − y;
end if
// vertausche x und y
z = x;
x = y;
y = z;
end if
return (x, y);
end function
Hierbei kommen die C-Operatoren ^ für bitweises XOR, & für bitweises UND, += für Inkrementieren, *=2 für Verdoppeln und /=2 für Halbieren zum Einsatz.
In der Funktion t2xyI bedeutet die Variable rx das Übereinstimmen des vorletzten Bits bei x und t; analog für ry und y mit dem letzten Bit.
Die Funktion (und ihre Umkehrung s. u.) benutzen die Funktion rot, um die Koordinaten x und y in einem Teilquadrat so zu spiegeln und zu drehen, dass die Teilstücke konsekutiv (stetig) zusammengefügt werden.
Explizite Rekursionsformel
| Eingabe: | Parameter |
| Ausgabe: | Koordinaten |
| Auswertungsrichtung: | grob zu fein |
Ist eine 4-adische Darstellung des Parameters, dann lässt sich die (unendliche) Folge auch als Rekursion[25] über die Quadratmittelpunkte



und die „absolute“ Ausrichtung mit dem Rekursionsanfang




und dem Rekursionsschritt
(RFh_ξ), (RFh_η)[28] und (RFh_a)






für schreiben. Die drei (4×4)-Matrizen


sind äquivalent zu den vier Übersetzungstabellen der Abbildung 7. Sie werden an ihrem ersten Index, dem Zeilenindex, durch die absolute Ausrichtung indiziert. Das Ergebnis ist bei , und jeweils eine vierstellige Zeile, die zusammen genommen eine der Übersetzungstabellen darstellen. Jede Stelle (Spalte) einer solchen Zeile wird durch die Quaternärziffer indiziert. Daraus resultiert (Gl.n RFh_ξ und RFh_η) das neue Ziffernpaar für den Punkt und (Gl. RFh_a) die neue absolute Ausrichtung.





Die Folge der Quadratmittelpunkte mit und , steht für die 2D-Intervallschachtelung




die zum Limes hat.

| Beweis der Rekursionsformel |
|
Die Gleichung RFh_a akkumuliert – wie in der Erläuterung zur Abb. 7 ausgeführt – die relativen Ausrichtungen[29] (Teil Ausr) zwischen Viertelquadrat und großem Quadrat und implementiert damit (zusammen mit der 2D-Intervallschachtelung (Teil Skal) der Gl.n RFh_ξ und RFh_η) die Transformationen und (Teil Parv) des Abschnitts #Transformation der rekursiven Teilquadrate auf das Einheitsquadrat. |
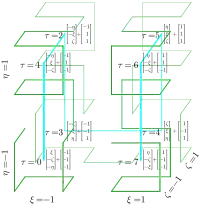
| Erläuterungen zu den Abbildungen 7 und 8 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Die oberste der vier Graphiken der Abb. 7, die für die Ausrichtung , ist ein Auszug aus der Abb. 4. Aus der Abb. 5 kann man die Daten zur zweiten und vierten Ausrichtung und direkt ablesen; für die dritte Ausrichtung ergeben sie sich durch Übergang zum 4. Iterationsschritt in der Abb. 5. Da die Abb. 5 anhand der Regeln des Abschnitts #Transformation der rekursiven Teilquadrate auf das Einheitsquadrat erstellt ist, werden diese Regeln auch von der Abb. 7 (und von den Matrizen (s. o.) und den Hypermatrizen (s. u.)) eingehalten. Die vier Graphiken unterscheiden sich hinsichtlich des Charakteristikums Ausrichtung durch eine der Isometrien aus der Gruppe . Anmerkungen
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||







































































Hilbert-Index
Die Funktion hat die Definitionsmenge , die Einschränkung die Definitionsmenge , beide haben die Bildmenge , die eine diskrete Menge ist. Die Funktion ist umkehrbar mit der Umkehrfunktion




welche Hilbert-Index genannt wird. Sie hat ihrerseits die Bildmenge . Unter den Einschränkungen auf die diskreten Mengen resp. sind die Funktionen wie umkehrbar eindeutig und es gilt und .[34]



Werden ihre Argumente und gleichermaßen als Binärbrüche entwickelt, dann kann man auch beliebige (-stellige) Koordinaten und zulassen, in der zu definierenden Funktion als erstes die Stellen rechts ab der -ten Stelle abschneiden,[35] sodann ausführen, die Einschränkung auf die diskrete Menge wieder aufheben und somit das ganze Einheitsquadrat zur Definitionsmenge der Funktion








erklären, so dass deren Einschränkung der Funktion vom Eingang des Abschnitts entspricht. Somit ergibt sich für alle sowohl


wie

Die Rückabwicklung der Transformationen und ist in den nachfolgenden Algorithmen im Einzelnen ausgeführt.
Rekursiver Algorithmus
Die Auswertungsrichtung des Algorithmus xy2tR[36] ist entgegen der Intervallschachtelung.
| Eingabe: | Koordinaten |
| Ausgabe: | Parameter |
| Auswertungsrichtung: | fein zu grob |
function xy2tR(x, y, eps) begin
if eps > 1 then
return 0; // im Ergebnisintervall der linke Rand
end if
eps *= 2;
if x < 1/2 then
if y < 1/2 then
return ( 0 + xy2tR(2*y, 2*x, eps) )/4;
else
return ( 1 + xy2tR(2*x, 2*y − 1, eps) )/4;
end if
else
if y >= 1/2 then
return ( 2 + xy2tR(2*x − 1, 2*y − 1, eps) )/4;
else
return ( 3 + xy2tR(1−eps − 2*y, 2−eps − 2*x, eps) )/4;
end if
end if
end function
Iterativer Algorithmus mit ganzzahligen Ein-/Ausgabewerten
Auch diese Aufgabe lässt sich iterativ programmieren.
Die iterative Funktion xy2tI arbeitet in Richtung Schachtelung, in der Binär- oder Quaternärdarstellung also von hochrangigen Ziffern zu niedrigrangigen, geometrisch von einem großen Quadrat zu einem der 4 Teilquadrate. Sie benutzt die bei t2xyI eingeführte Unterfunktion rot.
Ist die Nummer der Iteration, dann ist die Anzahl der 1D-Teilintervalle.
| Eingabe: | Koordinaten |
| Ausgabe: | Parameter |
| Auswertungsrichtung: | grob zu fein |
function xy2tI(x, y, p) begin
t = 0; // Summationsanfang
for (p /= 2; p >= 1; p /= 2) do
rx = (x & p) > 0;
ry = (y & p) > 0;
t += p * p * ((3 * rx) ^ ry);
(x, y) = rot(x, y, rx, ry, p);
end for
return t;
end function

Die runden Pfeile verweisen auf den großen Kasten mit dieser Ausrichtung.
Rekursionsformel für den Hilbert-Index
| Eingabe: | Koordinaten |
| Ausgabe: | Parameter |
| Auswertungsrichtung: | grob zu fein |
Sind und Darstellungen der Koordinaten im Binärsystem, dann lässt sich die (unendliche) Folge auch als Rekursion mit dem Rekursionsanfang

und (Start mit der initialen Ausrichtung )[37]


und dem Rekursionsschritt
(RFk_τ) (RFk_a)




für schreiben. Die zwei (4×2×2)-Hypermatrizen

sind zusammen genommen äquivalent zu den vier Übersetzungstabellen der Abbildung 7. Sie werden an ihrem ersten Index durch die absolute Ausrichtung indiziert. Das Ergebnis ist bei wie bei eine (2×2)-Untermatrix. Jedes solche Paar von Untermatrizen stellt eine Übersetzungstabelle dar. Eine Untermatrix wird durch das Binärziffernpaar indiziert. Daraus resultiert (Gl. RFk_τ) die neue Quaternärziffer für den Parameter und (Gl. RFk_a) die neue absolute Ausrichtung .



| Beweis der Rekursionsformel für die Umkehrfunktion Hilbert-Index |
|
Das kleine Quadrat (rechts in der Abb. 4) bekommt gemäß (Gl. RFk_τ) im großen Quadrat eine Nummer , die der (absoluten) Ausrichtung des großen Quadrats sowie der Lage des kleinen Quadrats im großen Quadrat, nämlich den Ziffern , entspricht. Erstere legt fest, welche der 4 Übersetzungstabellen in Abb. 7 anzuwenden ist, und letztere legen fest, ob das kleine Quadrat ins linke untere (bei ), ins linke obere (bei ) etc. Teilquadrat gehört, woraus die Ziffer resultiert. |





Analysis
Im Limes, also bei exakt , kommt – wie ein Blitz aus heiterem Himmel – ein neues Problem auf, nämlich der plötzliche Verlust der umkehrbaren Eindeutigkeit sowohl bei der 4- wie bei der 2-adischen Darstellung.

Darüber hinaus müssen wegen der Limites anstelle der halboffenen Intervalle und ihre abgeschlossenen Hüllen und betrachtet werden.



Hilbert-Kurve
Mit den Hilbert-Kurven (und den Hilbert-Polygonen ) lässt sich zu jedem positiven Abstand eine Iterationsstufe angeben, so dass es zu jedem Punkt des Einheitsquadrats einen Punkt des Rasters gibt, der einen kleineren Abstand hat. Das bedeutet aber nicht die vollständige Füllung des Quadrats. Diese kann nur durch den Übergang zum Limes erreicht werden. Der Limes





existiert immerhin, da er aus der 2D-Intervallschachtelung

hervorgeht. Die Konvergenz ist eine gleichmäßige im folgenden Sinn: Für jedes ist so, dass für alle Parameter und alle mit



gilt.
Eigenschaften
- ist rechtseindeutig, somit wohldefiniert und eine Funktion.
- ist surjektiv.
- ist nicht injektiv.
- ist stetig, definiert also eine Kurve. Die Stetigkeit ist eine gleichmäßige.
- Die Bilder des durch 3 geteilten Rasters sind genau die Eckpunkte der entsprechenden Rasterquadrate.
- .
- Ist die initiale Ausrichtung, dann ist symmetrisch zur Geraden :
Für jedes ist und .
Bei als initialer Ausrichtung wäre es die Gerade
und und . - Ist , dann ist
. - Ist rational, dann ist seine 4-adische Darstellung periodisch, bspw. mit der Periodenlänge . Die Koordinaten von sind dann beide ebenfalls rational mit einer 2-adischen Periodenlänge , wobei die Mächtigkeit der Menge der Ausrichtungen ist.[39]
- ist nirgends differenzierbar.[1][8]
- ist Maß-erhaltend: Für jede Punktmenge mit ein-dimensionalem Lebesgue-Maß hat das Bild das -dimensionale Lebesgue-Maß .[12] Das bedeutet auch, dass jedes Intervall in eine zusammenhängende (möglicherweise unendliche) Folge von Quadraten der Rasterschachtelung abgebildet wird.






















| Beweise der Eigenschaften | ||||||||||||||||||||||||||||||||||||
In der Tat ist nicht von vorne herein wohldefiniert, weil beim Übergang von einer reellen Zahl zu ihrer Quaternärentwicklung eine Weggabelung existiert: Zu einem gekürzten Bruch mit Zweierpotenz im Nenner, also zu einem Element [40], gibt es zwei Möglichkeiten der Darstellung. Beispielsweise hat der Bruch die Darstellung mit einem periodischen 04. …0-Ende (die als die »abbrechende Darstellung« bezeichnet wird, weil sie auch als endliche 4-adische Summe geschrieben werden kann) und die mit einem 04. …3-Ende
Diese Wahlmöglichkeit (Gleichheit) ist bei endlicher Stellenzahl (entspricht hier der Iterationsstufe) nicht gegeben, wo zwei verschiedene Ziffernfolgen immer verschiedene Werte haben; sie stellt aber im Fall die Forderung der Rechtseindeutigkeit an die Relation in Frage. Im Folgenden wird aber gezeigt, dass sie sich nicht auf das Ergebnis von auswirkt.[41]
Da bei jeder Iterationsstufe aus jedem Teilquadrat genau vier kleinere Teilquadrate gemacht werden, überdecken die Teilquadrate einer Iterationsstufe immer das ganze Ausgangsquadrat. Das Teilquadrat wird im Limes zum Kurvenpunkt. Somit füllt die Menge der Kurvenpunkte das ganze Ausgangsquadrat aus.
( kann als surjektive und stetige (s. u.) Funktion von 1D nach 2D nach dem Satz von der Invarianz der Dimension nicht injektiv sein.) Die oben gebildeten zwei 1D-Intervallschachtelungen sind genau dann mehrdeutig, wenn eine der beiden Koordinaten in liegt.[40] Beispielsweise ist
Jedes Teilquadrat enthält einen Tripel- und einen Quadrupelpunkt und damit abzählbar unendlich viele. Die Menge der Doppelpunkte ist überabzählbar. Zu einem Punkt gibt es maximal vier verschiedene Parameterwerte mit .[1] Zu Bildpunkten gibt es nur ein Urbild.
ist sogar Hölder-stetig[42] (was die gleichmäßige Stetigkeit[19] einschließt), und zwar zum Exponenten mit als der Dimension des Zielraums . bildet zwei benachbarte Intervalle stets auf zwei benachbarte Quadrate (mit gemeinsamer Seite) ab. Und da alle Quadrate späterer Iterationen den früheren treu bleiben (s. Abb. 4), folgt die gleichmäßige Stetigkeit.[43]
Die Drittelwerte von Ganzzahlen haben in ihrer 4-adischen Darstellung 04.0-, 04.1- oder 04.2-Enden. Durch den Algorithmus werden daraus 02.0- oder 02.1-Enden, also ganze Zahlen. Die Division durch exakte Zweierpotenzen ändert an den periodischen Enden der Darstellungen nichts.
Ist , dann ist ein abbrechender 4-adischer Bruch. Folglich sind auch die Koordinaten zwei abbrechende 2-adische Brüche. Nimmt man für die nicht-abbrechende 4-adische Darstellung mit 0-Ende, dann werden gemäß Abb. 7 bei den Koordinaten auch nur Nullen angehängt, da die Ausrichtungen zwischen und alternieren und bei beiden Ausrichtungen aus der Ziffer die Koordinatenziffern resultieren. Damit ist
Schon für alle gilt aus Symmetriegründen ; genauso . (S. a. den Beweis für denselben Sachverhalt im Abschnitt #Explizite Rekursionsformel.)
ist eine direkte Folge der Transformation . Iteriert ergibt sich .
Der Pseudocode Die Wiederkehr einer Konstellation Die Datenfelder function t2xyQ(tn,td) begin // 0 ≤ tn ≤ td (> 0)
if tn = td then return (1,1, 0,1); end if
// Ab hier ist stets 0 ≤ tn < td.
pos = 0;
xp = 0; yp = 0;
a = 0; // initiale Ausrichtung
key = a+tn*4; // die Konstellation (a,tn) als Schlüssel
while not defined(occurs[key]) do
occurs[key] = pos; // die Nummer der Stelle mit (a,tn)[44]
ti = floor(tn*4/td); // Quaternärziffer ti: 0 ≤ ti ≤ 3
tn = tn*4 − ti*td; // 0 ≤ tn < td
xp = xp*2 + X[a,ti]; // obige Matrix X
yp = yp*2 + Y[a,ti]; // obige Matrix Y
a = A[a,ti]; // obige Matrix A
key = a+tn*4;[44]
pos += 1;
end while
pl = pos−occurs[key]; // Vielfaches der beiden 2-adischen
// Periodenlängen von x und y
pot = 2**pl;
per = pot−1;
xd = per * 2**(pos−pl); // Nenner von x und y
xn = xp div pot; // Vorperiode von x
xp = xp−xn*pot; // Periode von x
xn = xn*per+xp; // Zähler von x
yn = yp div pot; // Vorperiode von y
yp = yp−yn*pot; // Periode von y
yn = yn*per+yp; // Zähler von y
return (xn,xd, yn,xd);
end function |
































































































Umkehrfunktion
Da im Limes nicht injektiv ist, ist es auch nicht umkehrbar. Dies ist so, obwohl die diskreten für alle endlichen umkehrbar sind und sowohl wie gilt. Die Nicht-Umkehrbarkeit drückt sich auch darin aus, dass der Limes




nicht existiert an den Punkten, wo eine der beiden Koordinaten oder eine abbrechende Binärdarstellung hat, also in

liegt. Nach der im Beweis der Nicht-Injektivität von gemachten Bemerkung hat genau an diesen Stellen mehr als ein Urbild.
Eine Art Umkehrung kann jedoch auch an diesen Stellen definiert werden durch die Vorschrift, dass die betreffende(n) Koordinate(n) oder/und , wenn sie bei einem Rekursionsschritt genau auf die Mitte eines Intervalls der Schachtelung fallen,

| der rechten (der oberen) Intervallhälfte zuzuschlagen und damit als 02. …0-Ende | (Vorschrift „+“ oder ) |

oder
| der linken (der unteren) Intervallhälfte und somit als 02. …1-Ende | (Vorschrift „−“ oder ) |

zu behandeln sind. Da stetig ist, erfüllen die so konstruierten Urbilder die Beziehung . Es gibt somit (mindestens) vier verschiedene[45] Funktionen
- ,
- ,
- und
- ,




die sich an den Stellen unterscheiden, an denen eine der beiden Koordinaten in liegt. An diesen Stellen sind die Funktionen auch nicht stetig.


Eine solche Funktion wird als Rechtsinverse (auch „Koretraktion“) von bezeichnet.[46] Sie erfüllt die Beziehung
- ,

die gleichbedeutend ist mit der Implikation
- .

Eigenschaften
- Alle sind Funktionen.
- Die Lösungsmenge zu einem Punkt ist[1]
.
Alle Elementeanzahlen, 1, 2, 3 und 4, kommen vor. - Alle Funktionen sind injektiv.
- Eingeschränkt auf ist eindeutig, also
für - Die Urbilder der Eckpunkte
der Rasterquadrate liegen im entsprechenden linearen Raster geteilt durch 3. - Keine der Funktionen ist stetig. Die Unstetigkeitsstellen sind
- Keine der Funktionen ist surjektiv.
- Sind die Koordinaten beide rational mit den beziehentlichen 2-adischen Periodenlängen , dann ist
ebenfalls rational mit einer 4-adischen Periodenlänge wo die Mächtigkeit der Menge der Ausrichtungen ist.[39]











| Beweise der Eigenschaften | ||||||||||||||||
Der Limes der #Rekursionsformel für den Hilbert-Index definiert die Funktion .[47]
S. Beweis von: ist nicht injektiv.
Eine Rechtsinverse ist injektiv.
haben nur ein Urbild .
(Die Argumentation ist analog zur Eigsch. 5 der Hilbert-Kurve.)
An den Mehrfachpunkten unterscheiden sich mindestens 2 der Funktionen , d. h. linksseitiger oder/und rechtsseitiger Grenzwert. Also ist keine der Funktionen dort stetig.
Wie gezeigt, gibt es mehrere Rechtsinversen . Gemäß Abschnitt Rechtsinverse ist davon keine surjektiv.
(Die Argumentation ist analog zur Eigsch. 9 der Hilbert-Kurve.) Der folgende Pseudocode Die Datenfelder function xy2tQpp(xn,xd, // 0 ≤ xn ≤ xd (> 0)
yn,yd) // 0 ≤ yn ≤ yd (> 0)
begin
pos = 0;
tp = 0;
a = 0; // initiale Ausrichtung
key = a+4*(xn+xd*yn); // die Konstellation (a,xn,yn) als Schlüssel
while not defined(occurs[key]) do
occurs[key] = pos; // die Nummer der Stelle mit (a,xn,yn)
xi = floor(xn*2/xd); // Binärziffer xi: 0 ≤ xi ≤ 2
if xi > 1 then xi = 1; end if
xn = xn*2 − xi*xd; // 0 ≤ xn ≤ xd
yi = floor(yn*2/yd); // Binärziffer yi: 0 ≤ yi ≤ 2
if yi > 1 then yi = 1; end if
yn = yn*2 − yi*yd; // 0 ≤ yn ≤ yd
tp = tp*4 + T[a,xi,yi]; // obige Hypermatrix T
a = A[a,xi,yi]; // obige Hypermatrix A'
key = a+4*(xn+xd*yn);[48]
pos += 1;
end while
pl = pos−occurs[key]; // die 4-adische Periodenlänge von t
pot = 4**pl;
per = pot−1;
td = per * 4**(pos−pl); // Nenner von t
tn = tp div pot; // Vorperiode von t
tp = tp−tn*pot; // Periode von t
tn = tn*per+tp; // Zähler von t
return (tn,td);
end function
Ersetzt man in diesem Pseudocode die 2 Zeilen xi = floor(xn*2/xd); // Binärziffer xi: 0 ≤ xi ≤ 2
if xi > 1 then xi = 1; end if
(die bei xi = ceil(xn*2/xd−1); // Binärziffer xi: −1 ≤ xi ≤ 1
if xi < 0 then xi = 0; end if
(die bei |









Einige Zahlenwerte
| Punkt | |||||||||
| Parameter |






Mehrfachpunkte
















































Darstellung als Lindenmayer-System
Die Hilbert-Kurve kann als Termersetzungssystem (Lindenmayer-System) formuliert werden.[49]
- Variablen:
A, B, C, D - Terminale:
↑, →, ↓, ← - (blaugrüne Pfeile in der Abb. 7)
- Startsymbol:
A - Ersetzungsregeln:
A ⇒ D ↑ A → A ↓ BB ⇒ C ← B ↓ B → AC ⇒ B ↓ C ← C ↑ DD ⇒ A → D ↑ D ← C
Die Ersetzungsregeln legen fest, welche Ausrichtung (welche Variable) in der nächsten Iteration durch welche Ausrichtung verbunden durch welche Pfeile (Terminale) ersetzt werden sollen.
Weiter gefasste Konstruktionsprinzipien
Die Bits im Index (Schrift gedreht) auf gerader Stelle in blau, auf ungerader in rot.
Der Moore-Index eines Quadrates mit Mittelpunkt findet sich am Schnittpunkt von -Spalte mit -Zeile. (Alle Zahlen im Binärsystem)
Die Hilbertkurve ist (bis auf Spiegelungen und Rotationen) die einzige zweidimensionale FASS-Kurve des Quadrats mit Start und Ende an zwei Ecken („vertex-gated“).[50]
Die Hilbert-Kurve nach Moore, kurz: die Moore-Kurve (engl. Moore curve) ist eine geschlossene Form der Hilbert-Kurve. Sie hat dasselbe Grundmuster wie diese. Die Übergänge zwischen den Quadraten wenden sich jedoch sowohl nach außen als auch nach innen. Sie ist genauso raumfüllend und hat sehr ähnliche Nachbarschaftseigenschaften wie die Hilbert-Kurve. Bei den Transformationen kommen alle acht Isometrien vor.
Weitere Kurven auf ähnlicher Konstruktionsbasis wurden gefunden.[51][7]
Die Konstruktionsprinzipien können noch weiter – unter Aufrechterhaltung der stetigen Raumfüllung – gelockert werden. Insbesondere die Aufgabe der Selbstähnlichkeit eröffnet eine Abundanz an Möglichkeiten. Hinweise dazu finden sich im Artikel Raumfüllende Kurve.
Ausblick auf den 3-dimensionalen Fall

Die nebenstehende Abbildung 10 zeigt Grundmuster und erste Iteration der Hilbert-Kurve beta[52] – eines von vielen Beispielen einer -dimensionalen Hilbert-Kurve.

Wie im 2-dimensionalen Fall stehen die verschiedenen Ausrichtungen über Isometrien des in Beziehung zueinander. Wie dort bilden diese Isometrien eine Gruppe, und zwar hier: eine Untergruppe der 48-elementigen Würfelgruppe. Das Beispiel der Abb. 10 zeigt eine Variante mit einer 24-elementigen Isometriengruppe, die zur symmetrischen Gruppe isomorph ist.

Es gibt im 3-dimensionalen Fall signifikant mehr Möglichkeiten für die Konstruktion einer Hilbert-Kurve, die sich durch die „Traversierung“ (engl. traversal, grün in der Abb.) charakterisieren lassen. H. Haverkort[52] klassifiziert alle 3-dimensionalen Hilbert-Kurven und zählt 920 „face-continuous“ (deutsch etwa: Zellen-stetig), bei denen zwei aufeinanderfolgende Nachbarwürfel ein Quadrat (eine -dimensionale Zelle) gemeinsam haben, und insgesamt 10 694 807 verschiedene 3-dimensionale Hilbert-Kurven (p. 20), wobei er auch Grundmuster zulässt, bei denen sich die Nachbarwürfel nur an einer Kante oder Ecke berühren (Figure 13). Er weist auch darauf hin, dass es (wie im 2-dimensionalen Fall) unendlich viele Hilbert-Kurven gibt, wenn man auf Selbstähnlichkeit verzichtet.

In der Abb. 10 ist das Grundmuster des Ausgangswürfels durch den Polygonzug in der Farbe türkis dargestellt. Dieses Grundmuster bringt in der ersten Iterationsstufe die 8 Teilwürfel innerhalb des Ausgangswürfels in eine zusammenhängende Reihenfolge.
In der zweiten Iterationsstufe wiederholt sich zwar dieses Grundmuster pro Teilwürfel, für die Traversierung der Teil-Teilwürfel der zweiten Stufe bleiben dennoch sehr viele Freiheitsgrade, die die Hilbert-Kurve als Ganze charakterisieren. Im Beispiel werden sie durch den grünen Polygonzug festgelegt. Die für die Traversierung erforderlichen Drehungen, Kippungen und/oder Spiegelungen an den 7 inneren Übergangsstellen des Grundmusters kann man anhand der Abb. verifizieren. (Nachbarschaften werden durch die bei der rekursiven Einbettung anfallenden Isometrien nicht geändert.) Bei den Übergängen zwischen den Teilwürfeln (den „gates“[52] S. 13) gibt es weitere Wahlmöglichkeiten. H. Haverkort klassifiziert die gezeigte Hilbert-Kurve beta als „facet-gated“ (deutsch etwa: Zellen-verbunden), weil die (Übergänge an den) Enden der Teilwürfel 0 und 7 im Innern einer Quadratseite liegen. Es gibt aber auch „edge-gated“ (deutsch etwa: Kanten-verbundene) und „vertex-gated“ (deutsch etwa: Ecken-verbundene) Hilbert-Kurven.[53]
In der Abb. 10 ist in den Teilwürfeln die Transformation eingetragen, die einen Würfel, der gleich wie der Ausgangswürfel ausgerichtet ist, abhängig von der Oktalziffer in den Teilwürfel der Nummer einbettet. Diese Transformation hat vier Komponenten, die Isometrie (gezeigt als Funktion der Koordinaten ), einen additiven Vektor, der die Parallelverschiebung, also das Zentrum des Teilwürfels der Ziffer angibt, die Skalierung um den Faktor und eine Angabe, in welcher Richtung das Grundmuster bei dieser Ziffer einzusetzen ist.



Nach H. Haverkort hat die Hilbert-Kurve beta als (die einzige) Zellen-verbundene (engl. facet-gated curve) hervorragende Nachbarschafts-erhaltende Eigenschaften. Bei 3 von Haverkorts 6 Kriterien („metrics“) steht sie auf Platz eins, bei den anderen 3 auf Platz zwei und ist ≤4 % vom Optimum entfernt (section 7.3 Locality-preserving properties).
Die Faltung des Genoms ähnelt einer dreidimensionalen Hilbert-Kurve.[54]
Erweiterungen
Hilbert-Kurven lassen sich auch effizient für Räume, die nicht Quadrate sind, implementieren. Durch Variation der »Geschwindigkeit« können unterschiedliche Dichten berücksichtigt werden.
Auch in höheren Dimensionen lassen sich Hilbert-Kurven generieren.[52][55][56]
Siehe auch
Literatur
- Michael Bader: Space-Filling Curves - An Introduction with Applications in Scientific Computing, Vol. 9 of Texts in Computational Science and Engineering. Springer-Verlag, 2013.
- Nicholas J. Rose: Hilbert-Type Space-Filling Curves. Abgerufen am 21. Dezember 2017.
- Herman Haverkort: How many three-dimensional Hilbert curves are there?, 2016. Abgerufen am 28. Juli 2018.
- Herman Haverkort: Sixteen space-filling curves and traversals for d-dimensional cubes and simplices, 2017. Abgerufen am 1. Januar 2018.
- Hans Sagan: Space-Filling Curves, (Springer) New York 1994.
- Walter Wunderlich. Über Peano-Kurven. Elemente der Mathematik, 28(1):1–24, 1973.
- Theodore Bially. Space-filling curves: Their generation and their application to bandwidth reduction. IEEE Transactions on Information Theory, IT-15(6):658–664, 1969. (Zitiert nach #Lawder)
Weblinks
- David Hilbert: Über die stetige Abbildung einer Linie auf ein Flächenstück. Mathematische Annalen 38 (1891), 459–460.
- Michael Bader: Raumfüllende Kurven (Memento vom 17. März 2005 im Internet Archive) TUM Informatik (PDF-Datei; 637 kB)
- Jonathan Lawder: Techniques for Mapping to and from Space-filling Curves, 1999.
- Java-Applet zur Konstruktion von Hilbert-Kurven
- David Hilbert (Memento vom 24. Dezember 2007 im Internet Archive)
- Hilbert- und Peano-Kurve
- Interaktive Demonstration der Hilbert-Kurve
- Die DNA liegt in einer dreidimensionalen Hilbert-Kurve im Zellkern vor
- Video mit 360-Grad-Flug um eine dreidimensionale Hilbert-Kurve
Einzelnachweise
- #Hilbert
- Michael Bader: Space-Filling Curves. An Introduction with Applications in Scientific Computing (= Timothy J. Barth, Michael Griebel, David E. Keyes, Risto M. Nieminen, Dirk Roose, Tamar Schlick [Hrsg.]: Texts in Computational Science and Engineering. Band 9). 1. Auflage. Springer-Verlag, 2013, ISBN 978-3-642-31045-4, ISSN 1611-0994, doi:10.1007/978-3-642-31046-1 (englisch, 278 S.). S. 18.
- B. Moon, H.V. Jagadish, C. Faloutsos, and J.H. Saltz: Analysis of the clustering properties of the Hilbert space-filling curve. IEEE Transactions on Knowledge and Data Engineering, Vol. 13, No.1, January/February 2001.
- H. K. Dai, H. C. Su: Clustering Performance of 3-Dimensional Hilbert Curves. Lecture Notes in Computer Science. Springer-Verlag, 2014.
- Michael Bader: Space-Filling Curves. An Introduction with Applications in Scientific Computing (= Timothy J. Barth, Michael Griebel, David E. Keyes, Risto M. Nieminen, Dirk Roose, Tamar Schlick [Hrsg.]: Texts in Computational Science and Engineering. Band 9). 1. Auflage. Springer-Verlag, 2013, ISBN 978-3-642-31045-4, ISSN 1611-0994, doi:10.1007/978-3-642-31046-1 (englisch, 278 S.). S. 172.
- M. Bader: Partitionierung der Menge der Variablen am Beispiel der Berechnung der Temperaturverteilung auf einer Metallplatte.
- C. Pérez-Demydenko, I. Brito Reyes, E. Estevez-Rams, B. Aragón Fernández: Locality preserving homogeneous Hilbert curves by use of arbitrary kernels.
- #Sagan
- Das Prinzip der Selbstähnlichkeit kann als ein Charakteristikum der Hilbert-Kurve angesehen werden. Andere Kriterien, wie z. B. die gleichförmige »Geschwindigkeit« oder die Berührung zweier Nachbargebiete an einer gemeinsamen -dimensionalen Zelle werden von den Autoren nicht so einheitlich der Hilbert-Kurve zugesprochen, denn auch die Berührung an nur Kanten oder nur Ecken führt im Limes zur Stetigkeit (s. a. den Abschnitt #Weiter gefasste Konstruktionsprinzipien).
- Um Undeutlichkeiten oder Verwechslungsmöglichkeiten mit dem Komma der Notationen für Intervalle oder Koordinatenpaare gering zu halten, wird im Folgenden als Trennzeichen zu den Stellen mit negativen Exponenten der Punkt verwendet. Der Text folgt diesbezüglich M. Bader wie auch in der Platzierung der Basis als Präfix bei diesem Punkt.
- Wie üblich bedeutet bei einer -adischen Entwicklung ein Strich über den letzten Ziffern eine unendliche Wiederholung dieser Zifferngruppe, eine Periode.
- H. Haverkort, 2017
- Entscheidet man sich für die Mitte einer Quadratseite statt für die Ecken, dann erhält man eine Abwandlung der hier definierten Hilbert-Kurve, nämlich die geschlossene Hilbert-Kurve nach Moore.
- J. Lawder S. 53ff
- Michael Bader: Space-Filling Curves. An Introduction with Applications in Scientific Computing (= Timothy J. Barth, Michael Griebel, David E. Keyes, Risto M. Nieminen, Dirk Roose, Tamar Schlick [Hrsg.]: Texts in Computational Science and Engineering. Band 9). 1. Auflage. Springer-Verlag, 2013, ISBN 978-3-642-31045-4, ISSN 1611-0994, doi:10.1007/978-3-642-31046-1 (englisch, 278 S.). S. 31.
- So M. Bader in der Vorlesung. „Grundmotiv“ bei Wunderlich
- Das Grundmuster fällt in diesem Fall der 2-dimensionalen Hilbert-Kurve exakt mit der Ausrichtung zusammen.
- Im Gegensatz dazu hat die nicht-stetige Z-Kurve die parallele (nicht antiparallele) Anordnung
 , bei der die Winkel (0,1,2) und (1,2,3) beliebig spitz werden können.
, bei der die Winkel (0,1,2) und (1,2,3) beliebig spitz werden können. - #Rose
- Michael Bader: Space-Filling Curves. An Introduction with Applications in Scientific Computing (= Timothy J. Barth, Michael Griebel, David E. Keyes, Risto M. Nieminen, Dirk Roose, Tamar Schlick [Hrsg.]: Texts in Computational Science and Engineering. Band 9). 1. Auflage. Springer-Verlag, 2013, ISBN 978-3-642-31045-4, ISSN 1611-0994, doi:10.1007/978-3-642-31046-1 (englisch, 278 S.). S. 49.
- Ist die initiale Ausrichtung, dann gibt es im Raster (für ) Quadrate der (absoluten) Ausrichtung , Quadrate der Ausrichtungen und und Quadrate der Ausrichtung .
- Im Gegensatz dazu ist eine endliche Ansammlung von Rasterpunkten ohne Verdeutlichung der Reihenfolge.
Der Parameter parametrisiert übrigens nicht die Verbindungsstrecken des Polygonzugs - Diese Auswertungsrichtung von den niedrigrangigen Ziffern der -adischen Darstellung zu den hochrangigen ähnelt dem Additionsverfahren abbrechender reeller Zahlen im Dezimalsystem, wie es in der Grundschule gelehrt wird.
- Michael Bader: Space-Filling Curves. An Introduction with Applications in Scientific Computing (= Timothy J. Barth, Michael Griebel, David E. Keyes, Risto M. Nieminen, Dirk Roose, Tamar Schlick [Hrsg.]: Texts in Computational Science and Engineering. Band 9). 1. Auflage. Springer-Verlag, 2013, ISBN 978-3-642-31045-4, ISSN 1611-0994, doi:10.1007/978-3-642-31046-1 (englisch, 278 S.). S. 52.
- T. Bially
- mit als Symmetrieachse. In der Literatur findet sich auch die Symmetrieachse , wohin man mit dem des hiesigen Artikels als initialer Ausrichtung kommt.
- Wird hier die von einer eventuellen Vorgängerkette als letzte (in Gl. RFh_a) errechnete Ausrichtung angegeben, dann ist der Funktionswert der Verkettung gleich der Verkettung des Funktionswerts der Vorgängerkette mit dem Funktionswert dieser Ziffernkette:
wobei die Ergebnisse der beiden Koordinaten separat zu verketten sind. - Mit nur an Stelle von erhält man die linken unteren Ecken der Quadrate.
- Michael Bader: Space-Filling Curves. An Introduction with Applications in Scientific Computing (= Timothy J. Barth, Michael Griebel, David E. Keyes, Risto M. Nieminen, Dirk Roose, Tamar Schlick [Hrsg.]: Texts in Computational Science and Engineering. Band 9). 1. Auflage. Springer-Verlag, 2013, ISBN 978-3-642-31045-4, ISSN 1611-0994, doi:10.1007/978-3-642-31046-1 (englisch, 278 S.). S. 63.
- T. Bially zitiert nach J. Lawder section 4.3.1 Generating State Diagrams by Hand S. 54
- Michael Bader: Space-Filling Curves. An Introduction with Applications in Scientific Computing (= Timothy J. Barth, Michael Griebel, David E. Keyes, Risto M. Nieminen, Dirk Roose, Tamar Schlick [Hrsg.]: Texts in Computational Science and Engineering. Band 9). 1. Auflage. Springer-Verlag, 2013, ISBN 978-3-642-31045-4, ISSN 1611-0994, doi:10.1007/978-3-642-31046-1 (englisch, 278 S.). S. 60.
- J. Lawder
- Die Ausrichtungen und sind also symmetrisch (zu sich selbst), wogegen symmetrisch ist zu und zu .
- Das lässt sich durch Abzählen leicht feststellen, denn bei jedem Iterationsschritt von werden genau 4 Teilintervalle in genau 4 Teilquadrate abgebildet.
- Andere Rundungsregeln führen nur zu Verschiebungen des Ergebnisses.
- Michael Bader: Space-Filling Curves. An Introduction with Applications in Scientific Computing (= Timothy J. Barth, Michael Griebel, David E. Keyes, Risto M. Nieminen, Dirk Roose, Tamar Schlick [Hrsg.]: Texts in Computational Science and Engineering. Band 9). 1. Auflage. Springer-Verlag, 2013, ISBN 978-3-642-31045-4, ISSN 1611-0994, doi:10.1007/978-3-642-31046-1 (englisch, 278 S.). S. 58.
- Wird hier die von 2 eventuellen Vorgängerketten und als letzte (in Gl. Fk_a) errechnete Ausrichtung angegeben, dann ist das Ergebnis für die verketteten Koordinaten gleich der Verkettung des Funktionswerts der Vorgängerkette mit dem Funktionswert dieser Ziffernkette.
Fazit
Bei beiden Richtungen, und , kann die Bildung der Ziffernkette(n) beliebig unterbrochen werden, wenn bei der Wiederaufnahme der Rekursion die zuletzt produzierte (absolute) Ausrichtung als initiale Ausrichtung eingegeben wird. - Michael Bader: Space-Filling Curves. An Introduction with Applications in Scientific Computing (= Timothy J. Barth, Michael Griebel, David E. Keyes, Risto M. Nieminen, Dirk Roose, Tamar Schlick [Hrsg.]: Texts in Computational Science and Engineering. Band 9). 1. Auflage. Springer-Verlag, 2013, ISBN 978-3-642-31045-4, ISSN 1611-0994, doi:10.1007/978-3-642-31046-1 (englisch, 278 S.). S. 63.
- #Wunderlich
- Die Menge ist dicht in und hat das Maß 0.
- Michael Bader: Space-Filling Curves. An Introduction with Applications in Scientific Computing (= Timothy J. Barth, Michael Griebel, David E. Keyes, Risto M. Nieminen, Dirk Roose, Tamar Schlick [Hrsg.]: Texts in Computational Science and Engineering. Band 9). 1. Auflage. Springer-Verlag, 2013, ISBN 978-3-642-31045-4, ISSN 1611-0994, doi:10.1007/978-3-642-31046-1 (englisch, 278 S.). S. 52f.
- Michael Bader: Space-Filling Curves. An Introduction with Applications in Scientific Computing (= Timothy J. Barth, Michael Griebel, David E. Keyes, Risto M. Nieminen, Dirk Roose, Tamar Schlick [Hrsg.]: Texts in Computational Science and Engineering. Band 9). 1. Auflage. Springer-Verlag, 2013, ISBN 978-3-642-31045-4, ISSN 1611-0994, doi:10.1007/978-3-642-31046-1 (englisch, 278 S.). S. 167f.
- Bemerkung zur einfachen Stetigkeit: Die beiden Möglichkeiten der Intervallschachtelungen (der Quaternärbruchdarstellungen) liefern so etwas wie einen linksseitigen und einen rechtsseitigen Grenzwert für an der Stelle . Die Stetigkeit von stellt sicher, dass diese beiden Grenzwerte gleich sind.
- Wegen
0≤a,a'<4ist(a,tn) = (a′,tn′)gleichbedeutend mita+4*tn = a′+4*tn′. - Es sind noch andere Funktionsvorschriften für die Umkehrfunktion denkbar. Zum Beispiel folgende:
Ist ein Punkt, bei dem im Laufe der -ten Iteration bspw. die Koordinate genau auf die Intervallmitte fällt, dann sollen (nicht einheitlich wie in den vorigen Beispielen, sondern) abhängig von der absoluten Ausrichtung oder einer anderen Gegebenheit des Rasters die restlichen Ziffern (mit ) als 02. …10-Ende oder eben als 02. …01-Ende aufgefasst werden. Das Ergebnis an diesem Punkt entspricht sicherlich einem für ein Paar , ohne mit ihm an anderen Punkten übereinzustimmen. - Zu jeder surjektiven Funktion gibt es Koretraktionen, und wenn sie nicht injektiv ist (wie hier), deren mehrere. Für eine Konstruktion bedarf es hier – wie gezeigt – nicht des Auswahlaxioms.
- Denn ein abbrechender 2-adischer Bruch wird »natürlicherweise« mit einem 02. …0-Ende entwickelt.
Für die Funktionen gibt es ähnliche Rekursionsformeln. - Wegen
0≤a<4und0≤xn<xdfolgt ausa+4*(xn+xd*yn) = a′+4*(xn′+xd*yn′)die Gleichheit der Konstellation(a,xn,yn) = (a′,xn′,yn′). - Michael Bader: Space-Filling Curves. An Introduction with Applications in Scientific Computing (= Timothy J. Barth, Michael Griebel, David E. Keyes, Risto M. Nieminen, Dirk Roose, Tamar Schlick [Hrsg.]: Texts in Computational Science and Engineering. Band 9). 1. Auflage. Springer-Verlag, 2013, ISBN 978-3-642-31045-4, ISSN 1611-0994, doi:10.1007/978-3-642-31046-1 (englisch, 278 S.). S. 32.
- Michael Bader: Space-Filling Curves. An Introduction with Applications in Scientific Computing (= Timothy J. Barth, Michael Griebel, David E. Keyes, Risto M. Nieminen, Dirk Roose, Tamar Schlick [Hrsg.]: Texts in Computational Science and Engineering. Band 9). 1. Auflage. Springer-Verlag, 2013, ISBN 978-3-642-31045-4, ISSN 1611-0994, doi:10.1007/978-3-642-31046-1 (englisch, 278 S.). S. 26.
- X. Liu. Four alternative patterns of the Hilbert curve. Applied Mathematics and Communication, 147:741–752, 2004.
- H. Haverkort, 2016
- Die 2-dimensionalen selbstähnlichen Hilbert-Kurven sind alle „vertex-gated“.
- Brandon Keim: The Human Genome in 3 Dimensions. Wired, 10. August 2009, abgerufen am 28. August 2013 (englisch).
- Michael Trott: The Mathematica GuideBook for Programming. Springer 2004. (2.3.9 Hilbert Curves in Higher Dimensions, S. 93–97)
- Arthur Butz, Alternative algorithm for Hilbert’s space filling curve, IEEE Trans. On Computers, vol. 20, April 1971, S. 424–442.

























