Wasserschall
Wasserschall ist Schall, der im Wasser übertragen wird. Das zugehörige Fachgebiet der Akustik ist die Hydroakustik. Gelegentlich wird der Begriff Wasserschall auch als Synonym für die technische Anwendung der Hydroakustik gebraucht.
Da sich elektromagnetische Wellen wie Radiowellen und Licht wegen ihrer stärkeren Absorption in Wasser viel schlechter ausbreiten können als Wasserschall und Reichweiten von wenigen Metern bis maximal 100 m besitzen, hat Wasserschall viele technische Anwendungen. Dies umfasst Kommunikation, Navigation und Ortung sowie die Messung von physikalischen, chemischen und biologischen Größen. Der hierbei verwendete Frequenzbereich umfasst etwa 10 Hz bis 1 MHz.
Wasserschallwellen hinreichender Sendeleistung können im tieffrequenten Bereich über jede nicht durch Land unterbrochene Wasserstrecke auf der Erde wahrgenommen werden.
Geschichte
Eine frühe Aussage zu Wasserschall findet sich bei Leonardo da Vinci, der 1490 schrieb: „Wenn Du ein Rohr in das Wasser tauchst und das andere Ende an Dein Ohr hältst, kannst Du Schiffe auf sehr große Entfernungen hören.“[1]
Im Jahr 1827 beschrieben Colladon und Sturm eine Messung der Schallgeschwindigkeit im Wasser im Genfersee. Ihnen ging es dabei um die Bestimmung der Kompressibilität des Wassers.[2]
Etwa um 1900 wurde damit begonnen, Wasserschall als Hilfsmittel für die Navigation zu nutzen.[3]
Vermutlich als Erster hat der amerikanische Ozeanograph Maury 1855 auf die Nutzung von Schall zur Echolotung der Wassertiefe hingewiesen. Seine eigenen Versuche blieben jedoch erfolglos.[3] Als Erfinder des Echolotes in den Jahren 1912 bis 1914 gelten daher Behm,[3] Fessenden und Richardson[1] völlig unabhängig voneinander, aber offenbar alle drei unter dem Eindruck des Untergangs der Titanic. Damals hielt man die Echos von Eisbergen für leichter zu bekommen als vom Meeresgrund.
Zum Ende des Ersten Weltkrieges standen auch die Kenntnisse zur Verfügung, die eine Echo-Ortung von U-Booten mit Schall ermöglichten, zur technischen Nutzung kam es jedoch nicht mehr. Dagegen kam die Passivortung von U-Booten schon im Ersten Weltkrieg zum Einsatz. Diese Technik, die zunächst in Großbritannien unter der Bezeichnung ASDIC lief, wurde später in Anlehnung zum Radar als Sonar bezeichnet.
Die U-Boot-Ortung nahm im Zweiten Weltkrieg einen erheblichen Aufschwung. Trotzdem war für die nachlassende Wirksamkeit der U-Boote im Zweiten Weltkrieg weniger die Nutzung des Wasserschalls als vielmehr das neu erfundene Radar und die Bekämpfung von U-Booten aus der Luft maßgeblich.
Nach dem Zweiten Weltkrieg entwickelten sich die bis dahin eher als „Tauchboote“ zu bezeichnenden U-Boote, die nur kurzfristig vorm Angriff oder bei akuter Bedrohung tauchten, zu echten Unterwasserfahrzeugen, die als konventionelle U-Boote zum Laden der Batterien nur noch kurz auftauchen oder schnorcheln. Nuklear angetriebene U-Boote oder konventionelle AIP-U-Boote sind fast nur noch mit Wasserschall bzw. Sonar zu orten. Deswegen hat die Entwicklung und Erforschung des Wasserschalls und von militärischen Sonargeräten einen erheblichen Aufschwung genommen. Hierzu hat beigetragen, dass man inzwischen auch Seeminen überwiegend mit Hilfe von Sonar detektiert.
Grundlegende Wasserschallphänomene
Schallwellen sind Druckwellen, die sich longitudinal ausbreiten, d. h., die Moleküle schwingen in die Richtung der Schallausbreitung. Sie brauchen also ein Medium, in dem sie sich ausbreiten können. Wie auch bei anderen Wellen gilt:

Hierbei ist:
- die Schallgeschwindigkeit im Wasser, die Frequenz des Schalls und die Wellenlänge des Schalls im Wasser.



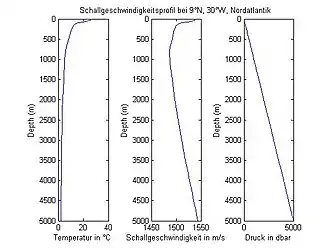
Im Ozean ist der Schall mit etwa 1480 m/s wesentlich schneller als in der Luft, wo er sich unter normalen Bedingungen mit ungefähr 340 m/s ausbreitet. Die Schallgeschwindigkeit nimmt mit der Temperatur, dem Druck und dem Salzgehalt zu. Da der Druck nahezu linear zur Tiefe verläuft, nimmt man oft diese, um die Schallgeschwindigkeit zu berechnen. Es gibt einige empirisch ermittelte Formeln, mit denen sich die Schallgeschwindigkeit relativ gut berechnen lässt. Diese Formeln sind alle recht ähnlich, eine einfache davon lautet:
- ,

wobei die Temperatur in °C, der Salzgehalt in psu und die Tiefe in Metern ist.



Für die Abhängigkeit der Schallgeschwindigkeit kann man sagen:
- In der oberen Schicht ist die Temperatur bestimmend, da sich diese Größe am stärksten ändert.
- Unterhalb der Temperatursprungschicht ist die Änderung der Temperatur sehr gering, hier ist die Tiefe der bestimmende Parameter.
- Der Salzgehalt hat kaum einen Einfluss auf die Schallgeschwindigkeit, da er an den meisten Stellen im Ozean einen fast konstanten Wert von etwa 3,5 % hat und damit der dazugehörige Term sehr klein ist. Man kann ihn oft vernachlässigen.
Weil Salzgehalt und Temperatur auch zu Dichteänderungen führen und in Flüssigkeiten horizontale Dichteänderungen statisch keinen Bestand haben, ist das Wasser mit nur schwachen horizontalen Gradienten geschichtet. Entsprechend ist der Gradient der Schallgeschwindigkeit und damit des Brechungsindex ebenfalls horizontal schwach. Dies hat zur Folge, dass Schallstrahlen, die senkrecht verlaufen, kaum gebrochen sind. Der Schall breitet sich in senkrechte Richtung sehr regulär aus, wie im freien, unbegrenzten Medium ohne Schallgeschwindigkeitsänderungen.
Wasserschallpegel
Als wichtigste Messgröße für den Wasserschall wird wie beim Luftschall der Schalldruckpegel verwendet. Obwohl formal die gleichen Methoden verwendet werden, sind Wasserschall- und Luftschallpegel nur schwer vergleichbar und führen bei Laien immer wieder zu Missverständnissen. Pegel sind logarithmische Größen und nur sinnvoll zu interpretieren, wenn die jeweils verwendeten Bezugswerte beachtet werden. Als Bezugswert für den Schalldruckpegel wird beim Luftschall 20 µPa gewählt, beim Wasserschall dagegen 1 µPa. Der Bezugswert beim Luftschall wurde in Anlehnung an die menschliche Hörschwelle gewählt und entspricht bei Ausbreitung einer ebenen Welle im Ausbreitungsmedium Luft einem Schalldruck von etwa 2 · 10−5 Pascal (20 µPa). Dieser Referenzschalldruck entspricht einer Intensität von etwa 10−12 W/m².
Bekanntlich ist Wasser wesentlich härter als Luft, so dass bei gleicher Intensität die akustisch relevante Partikelgeschwindigkeit wesentlich kleiner, dafür aber der Schalldruck größer ist. Aus diesem Grund ist ein Vergleich der Schalldrücke ohnehin wenig aussagekräftig. Wenn man schon vergleichen will, sollte man eher die Energieflussdichte (Intensität) heranziehen. Weil messtechnisch der Schalldruck besser zugänglich ist, zieht man ihn trotzdem vor. Die Bezugsintensität des Wasserschalls ist etwa 0,65 · 10−18 W/m² entsprechend dem dabei verwendeten Referenzdruck von 1 µPa. Die Beziehungen zwischen Schalldruck und Schallintensität sind einerseits vom statischen Druck, andererseits von Temperatur und Salzgehalt des Wassers abhängig. Näherungsweise unterscheiden sich gleiche Pegelangaben für Luft und Wasser bei ihrem jeweiligen Bezugsdruck in ihrer Intensität um etwa 62 dB.
Für eine – ohnehin fragliche – Vergleichbarkeit sind also vom Wasserschall etwa 62 dB abzuziehen. Weiterhin werden beim Luftschall oft frequenzbewertete Schalldruckpegel angegeben, um den Frequenzgang des menschlichen Gehörs zu berücksichtigen. Dies ergibt unter Wasser keinen Sinn und wird daher dort nicht angewendet, wodurch der Unterschied scheinbar gleicher Pegelwerte noch vergrößert wird. Die schwere Vergleichbarkeit von Schallpegelangaben für Luftschall und Wasserschall sorgt z. B. bei der Diskussion über die Schädlichkeit von Sonaren und Echoloten für Meerestiere häufig für Verwirrung.
Moderne Hochleistungs-Sonare und -Echolote erzeugen in einer Entfernung von 1 Meter einen Schalldruckpegel von etwa 220 bis 240 dB bezogen auf 1 µPa.
Schallabsorption
Die Schallabsorption wandelt Schallenergie in thermische Energie um. Nach der klassischen akustischen Theorie erfolgt dies einmal durch die adiabatische Temperaturänderung als Folge des Schallwechseldrucks. Durch Wärmeleitung bzw. Wärmestrahlung wird dem Schallfeld dabei Energie entzogen. Dieser Effekt ist im Wasser vernachlässigbar. Die andere klassische Absorptionsursache ist innere Reibung bei der Kompression und Dekompression. Sie spielt bei hohen Frequenzen (über 100 kHz) und in Süßwasser eine Rolle.
Diese beiden sogenannten klassischen Ursachen sind aber im Seewasser unter 100 kHz gegenüber der Relaxationsdämpfung, d. h. der durch die verzögerte Einstellung des Gleichgewichtsvolumens bei Druckänderung bewirkten Dämpfung, vernachlässigbar. Einige Komponenten des Seewassers liegen in verschiedenen chemischen Zuständen vor, deren Verhältnis zueinander druckabhängig ist und sich verzögert einstellt, wodurch dem Schallfeld akustische Energie entzogen wird, die in Wärme umgesetzt wird. Diese Relaxationsdämpfung wird bei tiefen Frequenzen (unter 10 kHz) durch Borsäure und höheren Frequenzen durch Magnesiumsulfat verursacht. Die Absorptionsdämpfung kann mit Technical Guides – Calculation of absorption of sound in seawater berechnet werden.[4]
Trotz dieser Effekte ist die Absorptionsdämpfung im Seewasser wesentlich geringer als in Luft und nimmt zu tieferen Frequenzen ab. Absorption tritt auch bei Reflexion am Meeresboden und z. B. an Eis sowie an Blasen im Wasser auf.
Der Schall nimmt mit dem Abstand von der Schallquelle nicht nur durch Absorption, sondern auch durch Divergenz ab. Dies führt in einem unendlichen Raum konstanter Schallgeschwindigkeit zu einer Abnahme der Schallintensität mit dem Quadrat der Entfernung (1/r²) bzw. des Schalldrucks mit der linearen Entfernung (1/r). Obwohl diese Divergenz-Dämpfung weitgehend frequenzunabhängig ist, stellt sie wegen der Schallgeschwindigkeitsschichtung im Meer und den Randreflexionen das Hauptproblem bei der Schallfeldberechnung dar.
Mehrwegeausbreitung
Weil die Schallstrahlen infolge der Temperaturschichtung (aber auch wegen der Druckzunahme mit der Tiefe und bei Salzgehaltschichtung) gekrümmt sind, werden sie bei größeren Übertragungsdistanzen normalerweise an der Meeresoberfläche oder am Boden oder beiden reflektiert. Daher gibt es mehrere Übertragungswege, aber häufig keinen direkten Weg ohne Randreflexion. Diese verschiedenen Wege zwischen Schallquelle und Empfänger haben insbesondere im Flachwasser nahezu die gleiche Laufzeit und werden deswegen am Empfänger häufig gar nicht als verschiedene Übertragungswege wahrgenommen. Sie haben aber unterschiedliche Phasen, was zu Interferenzen führt. Geringe Änderungen der Übertragungswege durch Reflexion an den rauen Berandungen, durch Brechungsindexvariationen infolge beispielsweise internen Wellen verändern diese Interferenzen, wodurch die Schallübertragung fluktuiert. Insbesondere bei größeren Entfernungen im Tiefwasser treten aber auch zeitlich deutlich voneinander abgesetzte Laufzeitgruppen auf.
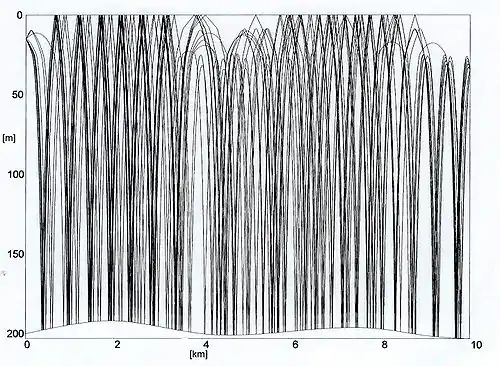
Die Mehrwegeausbreitung ist kennzeichnend für die Schallübertragung im Flachwasser, spielt aber auch im Tiefwasser über größeren Entfernungen eine Rolle.
In dem Bild handelt es sich um eine typische Situation, wie sie in der Nordsee im Sommer auftritt, wobei allerdings entgegen der Realität die Schallgeschwindigkeitsschichtung horizontal unveränderlich angenommen ist und die Berandungen, außer der erkennbaren leichten Welligkeit des Bodens, glatt sind. Die Realität ist also unvergleichlich komplizierter als hier dargestellt. Die Strahlen sehen wegen der Stauchung der Horizontalachse um etwa den Faktor 36 sehr steil aus, verlaufen aber in Wirklichkeit recht flach. Insbesondere gibt es bei diesem Schallgeschwindigkeitsprofil keine flacheren Strahlen.
Flachwasser-/Tiefwasser-Schallausbreitung
Im Flachwasser tritt schon bei relativ geringen horizontalen Abständen Mehrwegeausbreitung auf. Bei tieferen Frequenzen bilden außerdem die schallweiche Berandung an der Meeresoberfläche und die schallharte Berandung am Meeresboden einen Wellenleiter, der allerdings insbesondere durch unvollständige Reflexion am Meeresboden gedämpft ist. Bei sehr tiefen Frequenzen wird schließlich die Grenzfrequenz des Wellenleiters unterschritten, was zu einer sehr großen Dämpfung führt.
Im Tiefwasser spielt außer einer zusätzlichen Reflexion an der Meeresoberfläche beim flachen Sender die Mehrwegeausbreitung dagegen erst bei sehr großen Entfernungen eine Rolle. Sonst sind zumindest die Laufzeitunterschiede sehr groß. Durch den Anstieg der Schallgeschwindigkeit durch die Druckzunahme mit der Tiefe wird schließlich eine Schallübertragung über beliebige Distanzen ohne Bodenreflexion möglich. Von polarnahen Gewässern (und Randmeeren) abgesehen ist die Wassertemperatur an der Meeresoberfläche immer höher als im tiefen Wasser, wo sie auch am Äquator im Tiefenwasser nur wenig über 0 °C liegt. Dort gibt es also eine Schallübertragung ohne Randreflexionen (s. SOFAR-Kanal). Die Wassertiefe, in der die Schallgeschwindigkeit infolge des Druckanstieges so groß ist wie an der Oberfläche durch die Wirkung der Temperatur, nennt man „kritische Tiefe“. Sonarexperten reden erst dann von Tiefwasser, wenn die Wassertiefe größer als die kritische Tiefe ist.
Für die Abgrenzung zwischen Flachwasser und Tiefwasser gibt es also aus akustischer Sicht mehrere Kriterien, die zum Teil frequenzabhängig aber kaum entfernungsabhängig und zum Teil entfernungsabhängig aber frequenzunabhängig sind.
- Flachwasser liegt vor, wenn die Übertragung den Charakter eines Wellenleiters mit wenigen akustischen Moden hat. Dies ist der Fall wenn die Wassertiefe nur wenige Wellenlängen beträgt. Als Faustformel kann man ansetzen, dass Flachwasserausbreitung vorliegt, wenn das Produkt von Wassertiefe in m und Frequenz in kHz kleiner als 100 ist.
- Tiefwasser liegt vor, wenn die Wassertiefe größer als die kritische Tiefe ist.
- Bei hohen Frequenzen spricht man auch dann von einer Tiefwasserübertragung, wenn die horizontale Entfernung zwischen Sender und Empfänger die Größenordnung der Wassertiefe nicht übersteigt. Dann stellen die Mehrwege kein Problem dar.
Diese Definitionen sind natürlich unbefriedigend, weil nach ihnen das gleiche Gebiet mal Tiefwasser, mal Flachwasser ist. Sie werden deswegen nur im Zusammenhang der Kennzeichnung der Übertragungsverhältnisse (zum Beispiel „Tiefwasserbedingungen“) verwendet. Häufiger benutzen auch Sonarfachleute die Begriffstrennungen „Blaues Wasser“ für unstrittiges Tiefwasser, größer als die kritische Tiefe, die meistens bei 1000 bis 2000 m liegt. Dies ist die Hohe See insbesondere in den Tiefseebecken. „Grünes Wasser“ ist der Übergangsbereich, auch gekennzeichnet durch die ausschließliche Wirtschaftszone mit Wassertiefen geringer als die kritische Tiefe, aber tiefer als der typische Schelfrand bis 200 m Wassertiefe und schließlich „braunes Wasser“, als Küstengewässer auf dem Schelfsockel, zudem mit zusätzlichen Problemen für die Schallausbreitung etwa durch Flussmündungen, starken Tidenströmungen usw. Dieses „braune“ Flachwasser wird in der NATO zusammen mit sonstigen Gewässern besonderer Schwierigkeiten im Sonarbereich, wie zum Beispiel Fjorden, als „Confined Water“ bezeichnet.
Lloyd-Mirror-Effekt
Der Lloyd-Mirror-Effekt ist auch bei der elektromagnetischen Wellenausbreitung bekannt. Beim Wasserschall hat er deswegen Bedeutung, weil die Wasseroberfläche eine sehr schallweiche Begrenzung ist, das heißt, der Schalldruck ist im Verhältnis zur Schallschnelle an der Meeresoberfläche für Wasserschallverhältnisse nur verschwindend gering. Dies bedeutet, dass eine Schallwelle bei der Reflexion an der Meeresoberfläche die Phase um 180° dreht. Dadurch wird der Schalldruck an der Oberfläche durch Interferenz ausgelöscht. Mit zunehmendem Abstand von der Oberfläche nimmt dieser Phasenwinkel weiter zu, so dass keine Auslöschung mehr auftritt. Die Formel hierfür lautet bei großem Abstand


mit dem aktuellen Schalldruck im Vergleich zu Schalldruck im Freifeld ohne Berandung, den Abständen von Sender und Empfänger zur Oberfläche und sowie der akustischen Wellenlänge .




Bei tiefen Frequenzen im Flachwasser ist dieser Effekt modifiziert, weil man die Reflexionen am Meeresboden nicht vernachlässigen kann. Eine entsprechende Wirkung geht hier davon aus, dass alle Moden einen Schalldruckknoten an der Meeresoberfläche haben, wodurch eine ähnliche Schalldruckabnahme, schließlich als Folge der gleichen physikalischen Ursache, auftritt. Der Lloyd-Mirror Effekt wird ferner durch das Schallgeschwindigkeitsprofil beeinflusst und ist dann häufig von der Schallgeschwindigkeitsprofilwirkung der Schattenzone („Zone des Schweigens“) kaum zu trennen.
Die Bedeutung dieser Effekte liegt darin, dass Schallsender und -empfänger häufig am Schiffsrumpf, also sehr dicht an der Wasseroberfläche, befestigt sind.
Schattenzone
Meistens ist die Temperatur in der Nähe der Oberfläche am höchsten, so dass dort auch die Schallgeschwindigkeit größer ist. Der Schall wird daher nach unten gebrochen, so dass oberhalb des obersten möglichen Strahls (Grenzstrahl) keine Strahlen mehr hingelangen können. Dies gilt im Tiefwasser. Im Flachwasser kann dieses Gebiet durch die bodenreflektierten Strahlen aufgehellt werden. Oberhalb des Grenzstrahls beginnt die Schattenzone oder die „Zone des Schweigens“. Bei tieferen Frequenzen setzt als Folge von Beugung dieser akustische Schatten weich ein.
Diese Schattenzone tritt auch auf, wenn an der Oberfläche das Wasser vom Seegang völlig durchmischt wird (durchmischte Schicht, mixed Layer). In diesem Fall setzt die Schattenzone in der sogenannten Sprungschicht unter der durchmischten Schicht ein (bei der die darüber konstante Temperatur nach unten sinkt), während bei höheren Frequenzen in der durchmischten Schicht der Schall sich durchaus ausbreiten kann, weil hier wegen des Anstiegs des Wasserdrucks die Schallstrahlen leicht nach oben gekrümmt werden. Die Schallausbreitung in der durchmischten Schicht ist wegen der Reflexionen an der Meeresoberfläche stark seegangsabhängig. Die Streuung an der rauen Oberfläche kann die Schattenzone ein wenig aufhellen.
Hier gibt es also viele gegenläufige Effekte: Die durchmischte Schicht wird meistens durch Seegang erzeugt, der die Schallausbreitung in der durchmischten Schicht dämpft, die Schattenzone aber aufhellt. Die Schallausbreitung in der durchmischten Schicht ist nur bei höheren Frequenzen wegen des Lloyd Mirror-Effektes möglich. Die höheren Frequenzen werden aber wiederum von Seegang stärker beeinflusst.
Welcher der Effekte jeweils gewinnt, ist nur mit viel Erfahrung oder mit Hilfe numerischer Modelle vorherzusagen.
Afternoon-Effekt
Bereits vor dem Zweiten Weltkrieg hatte die amerikanische Marine festgestellt, dass man morgens ganz gute Sonarbedingungen erhielt, die nachmittags schlechter wurden, so dass häufig eine Ortung gar nicht mehr möglich war. Die Ursache besteht darin, dass morgens häufig durch die nächtliche Abkühlung eine bei den damals üblichen Aktivsonar-Frequenzen von 20 bis 30 kHz wirksame durchmischte Schicht aufgetreten war. Im Laufe des Tages steigt die Oberflächentemperatur durch Sonneneinstrahlung wieder an, so dass die durchmischte Schicht ihre Schallführungsfähigkeit verliert und die Schattenzone schon an der Oberfläche beginnt. Dieser Effekt ist am deutlichsten bei windarmen und sonnigem Wetter im Tiefwasser.
SOFAR-Kanal
Das bereits erwähnte Zusammenspiel der Schallgeschwindigkeitserhöhung an der Meeresoberfläche durch die Temperatur und in großen Tiefen durch den Druckanstieg führt dazu, dass eine Schallausbreitung, und zwar eine Mehrwegeausbreitung, ohne Reflexion an den Berandungen möglich ist. Die Achse dieses Kanals, d. h. die niedrigste Schallgeschwindigkeit, tritt ungefähr in 1000 m Tiefe auf. Dabei breitet sich Schall ähnlich wie Licht in einem Lichtwellenleiter aus. Dies trifft wegen der beträchtlichen Abmessungen im Tiefwasser durchaus auch für recht tiefe Frequenzen zu, die im freien Wasser wenig absorbiert werden. Dadurch werden sehr große Übertragungsreichweiten möglich, die schließlich nur noch durch die Ränder der Weltmeere begrenzt sind. Diesen Schallkanal im Tiefwasser nennt man SOFAR-Kanal (Sound Fixing And Ranging). Er spielt eine große Rolle bei der weiträumigen Überwachung des Meeres mit stationären Passivsonaranlagen SOSUS und bei der akustischen Meerestomografie.
Den SOFAR-Kanal gibt es nur im Tiefwasser. In der Ostsee gibt es im Sommer in den Becken auch einen ähnlichen Schallkanal, wobei der Schallgeschwindigkeitsanstieg unten nicht durch den Druck, sondern durch das Zusammenspiel von höherem Salzgehalt und höherer Temperatur verursacht wird (Baltic Duct). Weil dieser Kanal wesentlich geringere Abmessungen hat, wirkt er nur bei deutlich höheren Frequenzen und wird auch dort durch die starke Variabilität der Schichtung häufig gestört.
Konvergenzzonen-Ausbreitung
Bei größeren Wassertiefen als der kritischen Tiefe, wenn also die temperaturbedingte höhere Schallgeschwindigkeit durch den Druckanstieg in der Tiefe überschritten wird, tritt ein Phänomen ein, dass der Schall von der Quelle an der Oberfläche zunächst in die Tiefe abtaucht (mit Schattenbildung schon in recht kurzen Abständen von wenigen km) und in größerer Entfernung, typisch irgendwo zwischen 50 und 70 km stark gebündelt wieder auftaucht. Diese sogenannte Konvergenzzone wirkt wie eine erneute Schallquelle, so dass sich die Konvergenzzonen in Vielfachen dieses Abstandes als Ringe um die ursprüngliche Schallquelle wiederholen. Dies war zunächst ein wichtiger Effekt für die Passiv-Sonarortung. Die tieffrequenten Schleppantennen (Towed arrays) sind besonders wirkungsvoll für die Konvergenzzonen.
Die Konvergenzzonen sind erst neuerdings mit der Einführung des LFAS (Low Frequency Active Sonar) auch für Aktiv-Sonar nutzbar, weil bei höheren Frequenzen die Absorptionsdämpfung im Wasser für eine Echo-Ortung zu groß ist.
Die Konvergenzzonen-Ortung geht nur bei Wassertiefen größer als die kritische Tiefe, weswegen der kritischen Tiefe eine besondere Bedeutung für die Sonarortung zukommt.
Akustische Wirkung von Blasen
Blasen bilden mit der Masse des umgebenden Wassers und der Kompressibilität des eingeschlossenen Gases ein Schwingungssystem hoher Güte. Bei der Resonanzfrequenz ist der Rückstreuquerschnitt sehr groß im Vergleich zum geometrischen Querschnitt der Blase. Blasen sind daher akustisch äußerst wirksam als Ursache für die Streuung von Schall, aber auch für die Dämpfung und für die Geräuscherzeugung.
Die Resonanzfrequenz einer Blase von a mm Durchmesser in z m Tiefe (Wasserdruck) beträgt[1]
- ,

also hat eine Blase von 1 mm Durchmesser nahe der Wasseroberfläche eine Resonanzfrequenz von 3,26 kHz.
Unterhalb der Resonanzfrequenz nimmt der Streuquerschnitt mit der vierten Potenz der Frequenz ab. Oberhalb geht er schließlich auf den geometrischen Querschnitt zurück.
In der Praxis haben folgende Blasen besondere Bedeutung
- die durch brechende See eingespülten Blasen, wobei auch schon kleinste Schaumköpfe wirksam sind
- die Schwimmblasen von Fischen
- die Blasen im Kielwasser von Schiffen
- aufsteigende Blasen von Methangas-Lagerstätten
Die brechende See stellt im mittleren Frequenzbereich die Hauptursache des natürlichen Umgebungsgeräuschs im Wasser dar und kann eine sehr starke Dämpfung des Schalls vor allem im Flachwasser bewirken.
Das Fishfinder-Sonar nutzt die Rückstreuwirkung der Schwimmblasen. Spezielle Forschungslote, z. B. das Simrad EK60, verwenden mehrere Frequenzen, wodurch es möglich wird, die Anzahl von Fischen nach Größenklassen zu bestimmen, weil die verschiedenen Größenklassen Resonanz bei unterschiedlichen Frequenzen zeigen.
Kielwassersuchende Torpedos nutzen nach oben gerichtete Echolote bei zwei Frequenzen, eine mit starker Resonanz-Streuwirkung und eine zweite bei sehr hoher Frequenz, entsprechend einem Blasendurchmesser von wenigen µm, bei denen die Zahl und Wirksamkeit der Blasen relativ gering ist. Dadurch kann der Torpedo erkennen, wann er das Kielwasser kreuzt.
Umgebungsgeräusch im Meer
Als Geräusch bezeichnet man alle nicht erwünschten beobachteten Schallereignisse im Gegensatz zu den erwarteten „Signalen“. Dabei ist zwischen dem Eigengeräusch (self noise) zu unterscheiden, dem Geräusch, das durch den Schallempfänger oder seine Plattform selbst erzeugt wird, und dem Umgebungsgeräusch, das auch ohne den Schallempfänger vorhanden ist.
Das Eigengeräusch kann echter Wasserschall sein, der am Empfänger (Hydrophon) oder der Trägerplattform (Schiff) entsteht, oder Körperschall, der auf den Schallempfänger über seine Befestigung übertragen wird, oder auch durch elektrische Störungen unmittelbar am Empfänger verursacht sein.
Das Umgebungsgeräusch kann einmal aufgeteilt werden in natürliche Schallquellen oder solche, die auf die Tätigkeit oder Einrichtungen des Menschen zurückzuführen (man made noise) sind, zum anderen ist zwischen dauerndem im Pegel nur langsam schwankendem Schall und kurzen Schallereignissen (Transienten) zu unterschieden, die ebenfalls natürlich Ursprungs oder vom Menschen verursacht sein können.
Im Frequenzbereich werden nach Urick[1] fünf Bereiche unterschieden:
- Unterhalb 1 Hz. Hier empfängt man im Wesentlichen „Pseudoschall“, d. h. Druckschwankungen, die nicht auf wellenartige Ausbreitung zurückzuführen sind, sondern auf den hydrostatischen Druck durch den veränderlichen Wasserstand oder strömungsinduzierte Druckschwankungen durch den Bernoulli-Effekt. Als Transienten fallen in diesen Frequenzbereich auch die Auswirkungen von Erdbeben, die echter Schall (mit sich ausbreitenden Wellen) sein können. Ein systematischer Frequenzgang ist nicht angebbar.
- Zwischen 1 Hz und etwa 20 Hz (10 bis 30 Hz) fällt das Umgebungsgeräuschspektrum mit etwa 8 bis 10 dB/Oktave ab. Bei 1 Hz beträgt es etwa 120 dB rel. 1 µPa und 1 Hz Bandbreite. Als Ursache werden auch hier im Wesentlichen Bernoullische Druckschwankungen durch Turbulenz vermutet. In flacherem Wasser bewirkt aber auch der Seegang unmittelbar derartige Druckschwankungen.
- Je nach Dichte des Seeverkehrs erhält man zwischen 10 Hz und 200 Hz (bei starkem Schiffsverkehr und geringem Seegang auch bis 1 kHz) ein relatives Maximum in erster Linie durch die Geräusche entfernter Schiffe. Aber auch an den wenigen Orten, wo das weittragende Geräusch von Schiffen nicht wahrnehmbar ist (einige Gegenden des Südpazifik) fällt in diesem Bereich das Geräusch mit zunehmender Frequenz weniger ab, weil dann ferne Geräusche von Wellenschlag an der Küste und von der Packeisgrenze wahrnehmbar sind. Das relative Maximum bei etwa 80 Hz beträgt bei schwachem Schiffsverkehr etwa 70 dB rel. 1 µPa und 1 Hz und bei starkem Schiffsverkehr (ohne ein einzelnes Schiff in der Nähe des Empfängers) etwa 90 dB rel. 1 µPa und 1 Hz.
- Oberhalb von etwa 200 Hz bis etwa 20 kHz, bei starkem Seegang bis etwa 100 kHz, wird das Umgebungsgeräusch durch die brechende See („Klingeln“ von Blasen in der brechenden See) oder bei stärkerem Regen durch die vom Regeneinschlag erzeugten Blasen verursacht. Aber auch in diesem Frequenzbereich überwiegen die Geräusche von nahen Schiffen (vorwiegend Kavitationsgeräusch vom Schiffspropeller oder zum Beispiel das Geräusch vom Schleppgeschirr von Fischern, wenn sie in der Nähe sind).
- Oberhalb von 20 kHz gewinnt schließlich das thermische Rauschen durch Brownsche Molekularbewegung. Es beträgt bei 100 kHz etwa 25 dB rel. 1 µPa und 1 Hz, steigt mit der Frequenz an und ist entsprechend dem geringen Variationsbereich der Wassertemperatur im Meer wenig variabel.
Nachhall
Als Nachhall bezeichnet man kontinuierliche Reflexionen von Schallwellen (Schallreflexionen) in einem geschlossenen Raum oder in einem natürlich begrenzten Bereich. Echos sind dagegen Reflexionen von einzelnen Objekten.
Beim Luftschall wird der Nachhall durch die Nachhallzeit charakterisiert. Beim Wasserschall – bei dem der Nachhall nur bei der Aktivortung (und multistatischen) Ortung von Bedeutung ist – interessiert man sich dagegen für den Entfernungsverlauf des Nachhalls im Vergleich zum Zielecho.
Unter Sonaroperateuren hört man oft die Faustregel, dass die erzielbare Ortungsweite so groß sei wie die Nachhallweite. Dies klingt plausibel, weil sowohl für das Echo als auch für den Nachhall die Ausbreitungsdämpfung des Schalls maßgeblich ist. Andererseits kann gerade starker Nachhall – der deswegen weit reicht – das Zielecho maskieren. Dadurch entsteht eine inverse Beziehung zwischen Nachhallweite – d. h. der Entfernung (oder Zeit), in der der Nachhall im Geräusch verschwindet – und der maximalen Ortungsentfernung.
Je nachdem, ob die Nachhallentfernung oder die maximale Ortungsentfernung größer ist, spricht man von nachhallbegrenzter oder geräuschbegrenzter Reichweite. Wenn die Reichweite nachhallbegrenzt ist, führt eine Erhöhung des Sendepegels zu keiner größeren Reichweite. Im Flachwasser erhält man meistens nachhallbegrenzte und im Tiefwasser eher geräuschbegrenzte Reichweiten. Aus dem Grund verfügen Sonaranlagen, die für Flachwasser optimiert sind, üblicherweise über eine geringere Sendeleistung als typische Tiefwasser-Sonaranlagen.
Zur Verringerung des Nachhalleinflusses gibt es im Wesentlichen zwei Möglichkeiten. Die eine besteht darin, dass die Echos von Ortungszielen durch die Fahrtgeschwindigkeit des Ziels eine Dopplerverschiebung erfahren, die zumindest bei sich schnell nähernden Objekten größer als der Dopplerfrequenzbereich des Nachhalls ist. Dadurch wird das Ziel durch „Dopplerselektion“ vom Nachhall unterschieden. Die andere Möglichkeit besteht darin, die Zeit- und Winkelauflösung der Anlage zu erhöhen, weil damit die gleichzeitig illuminierte Fläche verringert und damit der Nachhall relativ zum Ziel gesenkt wird. Neben den erhöhten Anforderungen an die Technik der Sonaranlage stößt diese Maßnahme aber an zwei Grenzen: Zum einen verfügen Signale hoher Zeitauflösung grundsätzlich über eine geringe Frequenzauflösung, können daher den Dopplereffekt schlechter nutzen. Zum anderen verliert bei hoher Auflösung der Nachhall unter Umständen seinen diffusen Charakter. Im Nachhall treten einzelne lokale Spitzen als „Falschziele“ hervor, die vom gesuchten Ziel schwer zu unterscheiden sind.
Man unterscheidet drei Arten von Nachhall nach dem Ort ihrer Entstehung, den Oberflächennachhall, den Volumennachhall und den Bodennachhall.
Im Flachwasser spielt normalerweise der Bodennachhall die größte Rolle. Der Boden ist die Berandung, die durch das Schallgeschwindigkeitsprofil mehr und unter steilerem Winkel getroffen wird (siehe Bild von der Mehrwegeausbreitung im Flachwasser). Je nach Art des Bodens ist der Nachhall sehr unterschiedlich. Je rauer der Boden ist, desto mehr Nachhall verursacht er. Das räumliche Wellenzahlspektrum bestimmt über die Bragg-Gleichung dabei die Frequenzabhängigkeit des Nachhalls. Bei Sand nimmt der Nachhall daher z. B. zwischen einigen 100 Hertz und einigen Kilohertz zu. Zerklüfteter felsiger Grund führt zu kräftigem, aber wenig diffusen Nachhall mit starkem Falschzielcharakter. Schlickboden hat üblicherweise eine sehr glatte Oberfläche, kann aber starken Nachhall erzeugen. Dies beruht darauf, dass Schall in den Schlick gut eindringt und der Nachhall dann von Gasblasen im Schlick oder der Rauigkeit der Strukturen unter dem Schlick bestimmt ist. Weil die Dämpfung des Schalls im Schlick stark frequenzabhängig ist, tritt hierdurch bevorzugt tieffrequenter Nachhall auf.
Der Nachhall von der Meeresoberfläche spielt insbesondere im Winter (keine Temperaturerhöhung des Wassers zur Meeresoberfläche hin) eine Rolle. Er wird stärker durch Reflexionen an vom Seegang eingespülten Blasen als durch die Seegangsrauigkeit verursacht. Weil er nur vom Wind (und dem mit dem Wind zusammenhängenden Seegang) abhängig ist, aber kaum vom Ort, haben Chapman und Harris bereits 1962 eine sehr brauchbare empirische Beschreibung des Oberflächennachhalls vorgestellt.[5]
Volumennachhall wird durch Streukörper in der Wassersäule verursacht. Er ist normalerweise wesentlich schwächer als der Nachhall von den Berandungen und wird in erster Linie im Tiefwasser und in Echoloten beobachtet. Seine wichtigste Ursache ist bei hohen Frequenzen Plankton und bei mittleren bis tiefen Frequenzen Fisch, oder genauer gesagt, die luftgefüllten Schwimmblasen von Fischen. Die Verteilung der Nachhallquellen im Wasser ist nicht gleichmäßig, entsprechend dem bevorzugten Aufenthaltsort von Plankton (dem auch die Fische folgen). Unter bestimmten Bedingungen, etwa im Ostseeschallkanal oder bei Anwesenheit großer Fischschwärme, wird der Volumennachhall auch im Flachwasser wirksam.
Technische Anwendungen
Man unterscheidet im Wesentlichen zwischen Anwendungszielen:
- Tiefenmessung: Echolot
- Ortung: von Ubooten (Ujagd), Minen (Minenjagd), mit Aktiv- und Passivsonar
- Fishfinder für die Suche nach Fischen und Fischschwärmen
- Unterwasserbildgewinnung: Seitensichtsonar
- Unterwasserkommunikation: Unterwassertelefon
- Unterwassernavigation: z. B. Posidonia
- Bestimmung der Strömungsgeschwindigkeit
- Ocean Acoustic Tomography
Echolote
Das traditionelle Echolot wird zur Unterscheidung von den Sonderformen als Navigationslot bezeichnet, weil es als Standardausrüstung eines Schiffes zur sicheren Navigation dient. Es hat meistens einen begrenzten Tiefenbereich, weil bei großen Tiefen die Wassertiefe für die Navigation unerheblich ist, und ist üblicherweise nicht gegen die Schiffsbewegungen stabilisiert und wenig gebündelt.
Forschungslote oder Vermessungslote sind wesentlich aufwändiger gebaut. Für eine präzise Orts- und Tiefenbestimmung sind sie eng gebündelt (Narrow Beam Sounder, Schelfrandlot), damit die Tiefe nicht als Schrägentfernung bei geneigten Meeresböden gemessen wird. Sie müssen daher auch hinsichtlich der Schiffsbewegungen stabilisiert sein.
Heute werden für Forschung und Vermessung vorwiegend Fächerlote verwendet. Bei ihnen wird die Richtungsauflösung zwischen Sender (hohe Auflösung in Vorausrichtung, breit in Querrichtung) und Empfänger (mehrere Empfangskeulen durch elektronisches Schwenken der Richtkeulen simultan für viele Richtungen – daher Fächer) geteilt. Sie erlauben flächige Erfassung des Meeresbodens statt Profillinien unter dem Schiff. Für Vermessungszwecke ist das aktuelle Schallgeschwindigkeitsprofil vor Ort und der momentane Wasserstand zu berücksichtigen.
Sedimentpenetrierende Lote erlauben je nach Leistung und Frequenz die Durchschallung der oberen Sedimentschichten. Sie sind relativ tieffrequent und stellen einen gleitenden Übergang im technischen Bau und in der Anwendung zu seeseismischen Systemen (Seismik) dar. Sedimentpenetrierende Lote sind deswegen tieffrequent, weil die Dämpfung im Boden sehr groß und näherungsweise linear frequenzproportional ist.
Für Sportschiffer und Taucher gibt es auch kleine Handlote in der Form einer Taschenlampe.
Militärische Sonare
- Ujagdsonar
- Ubootsonar
- Minenjagdsonar, Minenmeidesonar
- Waffensonar
Beim Ujagdsonar unterscheidet man zwischen Aktivsonar (Echo-Ortung) und Passivsonar. Neuerdings werden auch Mischformen eingesetzt: Bistatisches Sonar, d. h., Sender und Empfänger sind auf örtlich getrennten Plattformen angeordnet.
Nach dem Zweiten Weltkrieg spielten zunächst Aktivsonare am Bug des Schiffes eine große Rolle (Bugsonar, Hull mounted Sonar). Sie wurden dann Anfang der 1970er Jahre ergänzt durch Schleppsonare (Towed Array Sonar, TA). Die weitere Geräuschminderung auch bei nuklear betriebenen U-Booten machte die Rückkehr zu Aktivsonar (Echoortung) notwendig, heute vorwiegend durch tieffrequente Schleppsonare, bei denen dem Towed Array eine tieffrequentes nachgeschlepptes Sendeaggregat zugefügt ist („Active Adjunct“). Heute werden aber für diesen Zweck kaum noch die alten Towed Arrays mit ihrer Ausrüstung für sehr große Bandbreiten (z. T. 10 Hz bis 1 kHz) verwendet, die in der Richtung zwischen rechts und links nicht unterscheiden konnten. Stattdessen verwendet man Kardioid- (Triplet-) oder Twin-Arrays, die diese Unterscheidung erlauben, aber im Frequenzbereich auf die Sendefrequenz beschränkt sind. Diese Anlagen arbeiten anders als die herkömmlichen Aktivsonaranlagen, die im Mittelfrequenzbereich (3 kHz bis 20 kHz) betrieben wurden, im Tieffrequenzbereich (100 Hz bis 3 kHz).
Während des Kalten Krieges hatte die amerikanische Marine weltweit an verschiedenen Orten stationäre Passiv-Sonaranlagen auf dem Meeresgrund installiert zur großräumigen Überwachung gegnerischer Uboote. Diese damals streng geheim gehaltenen Anlagen werden SOSUS (Sound Surveillance System) genannt. Erst nach Ende des Kalten Krieges wurde dieses System bekannt gegeben und wird heute für zivile Zwecke verwendet, soweit es nicht inzwischen abgeschaltet ist.
An Minenjagdsonaranlagen werden wesentlich geringere Anforderungen hinsichtlich der Reichweite (< 1 km) gestellt, dafür umso höhere an die Auflösung, damit die vergleichsweise kleinen Ziele sicher erkannt und möglichst auch klassifiziert werden können. Entsprechend arbeiten sie bei sehr hohen Frequenzen zwischen 100 kHz und 1 MHz. Etwas geringer sind die Anforderungen an Minenmeidesonaranlagen, die nur den Träger (z. B. Fregatte oder U-Boot) vor Minen, vor allem Ankertauminen, rechtzeitig warnen sollen um ein Ausweichmanöver zu ermöglichen. Minenmeidesonare verwenden ähnliche Frequenzen wie Minenjagdsonare, sind im Allgemeinen aber bescheidener insbesondere hinsichtlich der Klassifizierungsmöglichkeiten gebaut.
Als Waffensonar bezeichnet man die Aktiv- oder Passivsonaranlage, über die viele Torpedos verfügen. Streng genommen müssten auch die akustischen Sensoren von Minen als passive Waffensonare bezeichnet werden. Dort werden sie jedoch als akustische Sensoren erfasst.
Aus Raummangel und wegen des geringeren Reichweitenbedarfs sind die Frequenzen des Waffensonars deutlich höher als beim Ujagdsonar, aber üblicherweise tiefer als die des Minenjagdsonars. Es gibt Aktiv- und Passivsonare als Torpedosonare, wobei gegenüber Ubooten üblicherweise Aktivsonare und gegenüber Oberflächenschiffen Passivsonare eingesetzt werden.
Bekannte Forschungseinrichtungen für Wasserschall sind in Deutschland die Wehrtechnische Dienststelle für Schiffe und Marinewaffen der Bundeswehr, Maritime Technologie und Forschung, in Europa das Centre for Maritime Research and Experimentation der NATO und in den USA das Naval Research Laboratory (NRL) sowie das Naval Undersea Warfare Center (NUWC). In anderen Ländern sind meist zentralisierte militärische Forschungseinrichtungen mit der Wasserschallforschung befasst.
Fishfinder Sonar
Es handelt sich um hochfrequente Aktivsonare, die Echos der Schwimmblasen orten. Die meisten Fishfinder nutzen nicht akustische Resonanzwirkung der Schwimmblasen, sondern arbeiten bei höheren Frequenzen. Es gibt aber insbesondere für Forschungszwecke (z. B. Simrad EK 60) Mehrfrequenz-Sonare, die mit Hilfe der Resonanzfrequenz eine Unterscheidung der Größe der Fische ermöglichen.
Abbildende Sonare
Hierunter wurde zunächst nur das Seitensichtsonar (Side-Scan-Sonar, SSS) verstanden. Einige moderne hochauflösende Fächerlote stellen hinsichtlich der erzielbaren Abbildungsqualität eine echte Konkurrenz zum SSS dar. Zudem geht der Trend zu Mischformen zwischen diesen beiden ursprünglich recht unterschiedlichen Verfahren.
Das Fächerlot arbeitet wie ein traditionelles Echolot mit Lotlinien, von denen es aber simultan mehrere parallel aufnimmt, wodurch ein zweidimensionales Tiefenprofil entsteht, also im Grunde (mit der Tiefe) eine dreidimensionale Abbildung.
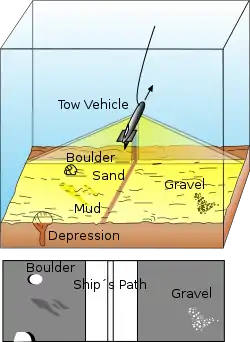
Das SSS erfasst seitlich je gesendetem Ping eine Linie auf dem Meeresboden, die durch die lokale Rückstreustärke des Meeresbodens längs dieses seitlichen Streifens moduliert ist. Mit der Abfolge der Pings entsteht so ein „Bild des Meeresbodens“, in dem sich z. B. Sand und Schlick deutlich unterschieden. Ebenso sind einzelne Objekte auf dem Grund durch eine starke Rückstreuung mit anschließender Unterbrechung der Rückstreuung durch die Schattenbildung gekennzeichnet. Dadurch ergeben sich in der Abfolge der Pings mit den „Zeilen“ je Pings Bilder mit dem intuitiven Eindruck von Schwarz-Weiß-Fotos. Sie enthalten aber keine unmittelbare Tiefeninformationen. Die Höhe von Objekten lässt sich aus der Schattenlänge abschätzen.
Moderne Entwicklungen bei SSS, etwa durch Nutzung des interferometrischen Effekts erlauben aber auch die Auswertung von Tiefeninformationen. Da andererseits auch Fächerlote durch geschickte Nutzung der Echosignale über die reine Abstandsbestimmung weiterentwickelt werden, nähern sich beide Verfahren immer mehr an.
Reichweite und Auflösung sind austauschbare, komplementäre Anforderungen an ein SSS. Übliche hochauflösende SSS mit Frequenzen von 200 kHz bis 1 MHz sind sehr beschränkt in der Reichweite, bei hohen Frequenzen auf einige 10 m. In der Meeresforschung werden aber auch SSS im unteren kHz-Bereich eingesetzt, die im Tiefwasser Reichweiten von nahezu 100 km erreichen können. Ein wesentlicher Parameter beim SSS ist auch die Höhe des Systems über Grund. Grundsätzlich wird die Abbildung umso fotoähnlicher, je dichter das Gerät über Grund gefahren wird. Weil aber horizontale Strahlen durch das Schallgeschwindigkeitsprofil gekrümmt sind, wird die Reichweite umso geringer, je dichter das Gerät über dem Boden betrieben wird.
Unterwasserkommunikation
Obwohl Wasserschall den heutigen Kommunikationsanforderungen nur sehr unzureichend genügt, sind bei Übertragungsstrecken über (je nach Trübung des Wassers) von 10 bis 300 m hinaus elektromagnetische Wellen praktisch ungeeignet, der Wasserschall also ohne Alternative. Bereits im Zweiten Weltkrieg wurde das Unterwassertelefon, UT oder Gertrude, eingesetzt. Es handelte sich um eine analoge Sprachübertragung in SSB-Technik im oberen Seitenband mit 9 kHz als Träger und dem aus der damaligen Telefonie gebräuchlichen Frequenzbereich 300 Hz bis 3 kHz. Insbesondere im Flachwasser war der Empfang wegen der Mehrwegeübertragung schlecht. Es stand auch nur dieser eine Frequenz-Kanal zur Verfügung. Inzwischen werden Übertragungsverfahren aus der modernen Mobilfunktechnik eingesetzt, die wegen der schlechten Ausbreitungsverhältnisse und der geringen verfügbaren Bandbreite (vorwiegend Frequenzen zwischen 5 kHz und 40 kHz) aber auch nur geringe Informationsmengen und Reichweiten zulassen.
Akustische Unterwassernavigation, Releaser
Obwohl die Anwendung des Wasserschalls mit der Navigationshilfe angefangen hat, gibt es heute praktisch kein absolutes (die Koordinaten bestimmendes) Navigationsverfahren mehr. Hier haben sich die elektromagnetischen Überwassernavigationsverfahren durchgesetzt. Es werden nur noch lokale relative Systeme verwendet, insbesondere um die Ortsbestimmung eines getauchten Systems relativ zu einer Überwasserplattform zu bestimmen.
Dazu werden eine oder mehrere Schallquellen verwendet, mit deren Empfang (mit mehreren Empfängern gebräuchlicher als mit mehreren Sendern) die Position zentimetergenau bestimmt werden kann. Dies erlaubt die genaue Ortsbestimmung von Geräten, die von einem Schiff aus abgesetzt (z. B. ROVs) sind oder geschleppt werden. Aber auch AUVs und Unterwasser-Lander werden mit ähnlich arbeitenden Systemen relativ zur Mutterplattform oder zu unterseeischen Bezugsstationen positioniert.
Derartige Systeme wurden lange Zeit auch zur dynamischen Positionierung verwendet, d. h., um schwimmende Plattformen durch geregelten Antrieb ortsfest zu halten (genauer als es durch Verankerung möglich wäre). Sie besaßen große Bedeutung für schwimmende Bohrplattformen und Bohrschiffe. Sie sind aber inzwischen weitgehend durch GPS-Systeme abgelöst, für die keine Bodensensoren genau positioniert werden müssen.
Große Bedeutung haben in der Meeresforschung so genannte Releaser, bei denen die Ortsbestimmung nur Nebenfunktion ist.[6] Sie werden bei verankerten getauchten Messsystemen eingesetzt, insbesondere wenn sie nicht durch eine Oberflächenboje markiert sind. Bei Ihnen wird je nach gesendetem Signal ein Antwortsignal geliefert, das einmal zur Funktionskontrolle, zum anderen aber auch zur Ortsbestimmung des Systems verwendet wird, oder es wird die Verbindung zu einem Grundgewicht gelöst, so dass das System aufschwimmen kann.
Akustische Strömungsmessung
Das heute wichtigste Messgerät zur Strömungsmessung ist der Acoustic Doppler Current Profiler (ADCP), ein Aktivsonar, das die Doppler-Frequenzverschiebung des Nachhalls von Streukörpern im Wasser (vorwiegend Plankton) zur Bestimmung der lokalen Strömungsgeschwindigkeit nutzt. Grundsätzlich ist die Auflösung durch die Nachhallunschärfe-Relation

begrenzt, wobei die Auflösung der Strömungsgeschwindigkeit, die Abstandsauflösung, die Schallgeschwindigkeit und die Mittenfrequenz des Sendesignals sind. Je höher die Frequenz, desto besser ist also die erzielbare Auflösung, desto kürzer ist wegen der frequenzabhängigen Dämpfung auch die Länge des Strömungsprofils. Die Auflösung lässt sich mit Hilfe großer Sendesignalbandbreite gegenüber der Nachhallunschärferelation erhöhen (Breitband-ADCP, BB-ADCP).




Akustische Meerestomographie (Ocean Acoustic Tomography, OAT)
Bei tomographischen Methoden handelt es sich durchweg um physikalisch-mathematische Methoden für die Gewinnung dreidimensionaler Felder bzw. für die Abbildung von Schnitten mit Hilfe inverser Verfahren. Diesen grundlegenden Ansatz hat die akustische Meerestomographie mit anderen tomographischen Verfahren gemeinsam. Durch eine Vielzahl von Schallsendern und -Empfängern soll die Laufzeit der Empfangssignale ausgewertet werden, um daraus die dreidimensionale Schallgeschwindigkeit bzw. die Temperaturverteilung innerhalb des eingeschlossenen Feldes zu erfassen. Allerdings weckt der Begriff Tomographie Erwartungen, die von der akustischen Tomographie nicht erfüllt werden können. Die Schallwellen breiten sich nicht geradlinig aus, wodurch die Beziehung zwischen der Laufzeit und der Temperaturschichtung nicht linear ist. Das erschwert die Invertierung. Man ist daher auf ein funktionales Modell der Wasserschichtung angewiesen, das über eine begrenzte Zahl freier Parameter verfügt, die mit Hilfe der Messung bestimmt werden. Da die Ergebnisse nur dann genau sein können, wenn das zugrunde liegende Modell genau ist („man kann nur etwas genau bestimmen, was man vorher schon kennt“), eignet sich die OAT nur für großräumige Phänomene und für Untersuchungen von zeitlichen Änderungen. Gerade für die Untersuchung der Variabilität hat sich diese anspruchsvolle, aufwendige Methode durchaus bewährt. Als Wegbereiter der OAT gelten Walter Munk und Carl Wunsch.
Relativ bekannt wurde das große Experiment ATOC (Acoustic Thermography of the Ocean Climate) im Pazifik, mit dem die nötigen großräumigen Mittelungen zur Bestimmung der globalen Erwärmung erreicht werden sollten.[7] Es nutzt sehr großräumig die Methoden der OAT.
Wasserschall und Wale
Angesichts der Überlegenheit des Wasserschalls als Kommunikationsmittel unter Wasser verwundert es nicht, dass auch Tiere den Wasserschall nutzen. Bekanntes Beispiel sind Walgesänge zur Kommunikation oder die Echoortung von Walen oder Delfinen. Aufgrund der technischen Nutzung kommt es somit zu Nutzungskonflikten. Nach heutiger Kenntnis betrifft dies insbesondere Meeressäuger. Sie sind ganz entschieden auf das Gehör als wichtigstem Sinn angewiesen. Das Geräusch unter Wasser wird auf der nördlichen Halbkugel inzwischen dauerhaft durch ein diffuses Geräusch von den Schiffen im Frequenzbereich zwischen 100 und 300 Hz geprägt, sofern es nicht durch sehr kräftiges natürliches Geräusch von der Meeresoberfläche bei Stürmen übertönt wird.
Zu den lautesten Geräuschen im Meer gehören neben Seebeben, unterseeischen Vulkanen und kalbenden Eisbergen seismische Hochenergie-Sonare (sogenannte Air Guns, auch Schallbomben genannt), die zur Suche von Erdöl und Erdgas im Meeresboden verwendet werden. Sie sind extrem laut (bis über 220 dB[8]) und werden rund um die Uhr im Abstand von wenigen Sekunden erzeugt.
Zunehmend geraten aber auch technische Einrichtungen unter Kritik. Zwar sind die festgestellten Schäden durch technischen Schall relativ gering, allerdings ist unbekannt, wie groß die Dunkelziffer ist.
Inzwischen kann als gesichert angesehen werden, dass mittelfrequente militärische Sonaranlagen im Frequenzbereich von 2 bis 5 kHz zu Strandungen von Schnabelwalen führen können.[9][10]
Bei mehreren Einzelereignissen sind seit 1996 etwa 50 Schnabelwale gestrandet und dadurch zu Tode gekommen. Bei den einzelnen Ereignissen waren jeweils etwa 10 Wale betroffen. Die Ursache ist eine panische Auftauch-Reaktion der tieftauchenden Schnabelwale, die zu der Taucherkrankheit führen, einer Embolie durch Ausperlen von Stickstoff.[11] Die Gefährdung der Wale durch Schall ist signifikant, aber immer noch gering im Vergleich zur Gefährdung durch Walfang (auch Beifang) und durch Kollisionen mit Schiffen.[12]
Literatur
- X. Lurton: An Introduction to Underwater Acoustics, Principles and Applications. 2. Auflage. Springer/Springer Praxis Books, 2010, ISBN 3-540-78480-2.
- R. J. Urick: Principles of Underwater Sound. 2. Auflage. McGraw-Hill, New York 1975, ISBN 0-07-066086-7.
- H. G. Urban: Handbuch der Wasserschalltechnik, STN Atlas Elektronik, Bremen 2000.
- P. C. Wille: Sound Images of the Ocean, Springer Verlag, 2005. ISBN 3-540-24122-1.
- J. R. Apel: Principles of Ocean Physics. Academic Press, London 1987. ISBN 0-12-058866-8
- Robert J. Urick: Principles of Underwater Sound. McGraw-Hill, New York 1967, 1975, 1983. ISBN 0-07-066087-5
- P. C. Wille: Sound Images of the Ocean. Springer Verlag, 2005, ISBN 3-540-24122-1 (zu den abbildenden Sonaren)
Einzelnachweise
- R. J. Urick: Principles of Underwater Sound. Mc Graw-Hill New York e.a. 1975
- J. D. Colladon, J.K. Sturm: Über die Zusammendrückbarkeit der Flüssigkeiten. In: Annalen der Physik und Chemie, Band 12, 1928, S. 161–197
- G. H. Ziehm: Kiel – Ein frühes Zentrum des Wasserschalls. In: Deutsche Hydrogr. Z., Ergänzungsheft Reihe B Nr. 20, 1988
- R. E. Francois, G. R. Garrison: Sound absorption based on ocean measurements. Part II: Boric acid contribution and equation for total absorption. In: J. Acoust. Soc. Am., 72, 1982, S. 1879–1890
- R. P. Chapman, J. H. Harris: Surface Backscattering Strengths Measured with Explosive Sound Sources. In: J. Acoust. Soc. Am., 34, 1962, S. 547
- Accoustic Release Transponders. (Memento vom 19. März 2014 im Internet Archive) (PDF) Boating Brochures
- NPAL Acoustic Thermometry
- Unterwasserlärm: Wale im Dauerstress, auf greenpeace.de
- D’Amico A. (Ed.) 1998. Summary Record, SACLANTCEN Bioacoustics Panel. La Spezia, Italy, 15–17 June 1998. Saclant Undersea Research Centre, M-133
- Schall-Bomben töten Meeressäuger
- P. L. Tyack et al.: Extreme Diving of Beaked Whales. In: Journ. Experim. Biology, 206, 1960, S. 4238–4253
- R. Thiele: Sonar: Gefahr für Wale?. In: Marineforum, 3, 2007, S. 33–36