Sonar
Sonar ist ein „Verfahren zur Ortung von Gegenständen im Raum und unter Wasser mittels ausgesandter Schallimpulse“.[1] Das Wort ist ein englisches Akronym von sound navigation and ranging, was sich mit Schall-Navigation und -Entfernungsbestimmung übersetzen lässt.

Sonar-Messtechniken nutzen die Tatsache aus, dass sich Schall unter Wasser insbesondere bei hohen Frequenzen sehr viel verlustärmer ausbreitet als in der Luft. Aus historischen Gründen wird begrifflich unterschieden zwischen Sonargeräten (kurz als „Sonare“ bezeichnet), die überwiegend horizontal, und Echoloten, die überwiegend vertikal orten.
Schallsignale können bei der Echoortung (aktives Sonar, hierzu zählt auch das Echolot) oder zur Lokalisation von Objekten eingesetzt werden, die selbst Schall emittieren.
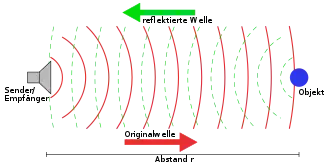
Aktive Sonare benutzen das Echoprinzip wie Radaranlagen, strahlen also selbst ein Signal aus, dessen Echo sie empfangen, aus dem sie über Laufzeit des Echos die Entfernung bestimmen. Echolote gehören zu diesem Typ.
In der Literatur wird oft von passivem Sonar gesprochen, wobei sich diese Angabe auf den passiven Betriebsmodus eines auch zum aktiven Senden fähigen Ortungssystems beziehen kann. Dabei werden nur die von Objekten eigenständig generierten Signale bzw. Geräusche empfangen, was die Tarnung des ortenden Systems schützt. In beiden Betriebsarten kann die Richtung des einfallenden Schalles bestimmt werden, eine präzise und verlässliche Entfernungsmessung ist jedoch oft nur im aktiven Betriebsmodus möglich.
Die Abgrenzung zwischen „Sonaranlagen“, die neben dem aktiven auch einen passiven Betriebsmodus haben können, und „Horchanlagen“, die ausschließlich die passive Schallortung erlauben, ist besonders in der englischsprachigen Literatur oft nicht eindeutig.
Geschichte
Die passive Ortungsmöglichkeit durch Wasserschall wurde von dem Universalgenie Leonardo da Vinci im Jahr 1490 erstmals erwähnt: „Wenn Du ein Rohr in das Wasser tauchst und das andere Ende an Dein Ohr hältst, kannst Du Schiffe auf sehr große Entfernungen hören.“ Ob er dies jedoch erfolgreich angewandt hat, ist fraglich, da Schiffe ohne Motor vergleichsweise wenige Geräusche erzeugen. Aber vielleicht war es möglich, den Trommelschlag des Taktgebers für die Ruderer, das rhythmische Eintauchen der Riemen oder das Knarzen des Holzschiffkörpers auf diese Weise zu hören.
Es werden drei Männer genannt, die etwa gleichzeitig völlig unabhängig voneinander ein aktives System zur Ortung von Eisbergen patentiert haben, das zwar gegen Eisberge nicht erfolgreich war, sich jedoch zur Tiefenortung als Echolot eignete. Alle drei standen offenbar unter dem Eindruck des Untergangs der Titanic: Dies sind einmal Alexander Behm (siehe Echolot), ferner der kanadische Erfinder Reginald Fessenden und schließlich Lewis Fry Richardson.
Im Ersten Weltkrieg stieg das Interesse an einer Weiterentwicklung des aktiven Sonars, um U-Boote zu orten. Der französische Physiker Paul Langevin entwickelte 1915 zusammen mit dem aus Russland emigrierten Elektrotechniker Constantin Chilowski das erste aktive Sonar-System, das schließlich geeignet war, U-Boote auf etwa 1500 m Entfernung zu orten. Auf britischer Seite wurde parallel intensiv unter der Bezeichnung ASDIC an einem aktiven Sonar gearbeitet. Zu einem operativen Einsatz von Aktivsonar kam es im Ersten Weltkrieg nicht mehr. Hingegen wurden schon verschiedene Versionen von passiven Anlagen verwendet.

Obwohl die Entwicklung zwischen den Weltkriegen nur relativ langsam voranging, standen im Zweiten Weltkrieg ausreichend entwickelte passive und aktive Systeme zur Verfügung. Dennoch wurden U-Boote anfangs vor allem im aufgetauchten Zustand geortet, weil diese damals nur zeitweilig bei Gefahr oder zum Angriff tauchten („Tauchboote“). Die Bedeutung des aktiven Sonars bestand darin, einen einmal gewonnenen Kontakt zu einem getauchten U-Boot unabhängig von seinen Eigengeräuschen aufrechterhalten und vor dem Wasserbombeneinsatz seine Entfernung, Kurs und Geschwindigkeit bestimmen zu können.
Die Tauchtiefe des U-Bootes konnte dagegen wegen der Schallbrechung im Wasser und anfangs fehlender Schwenkmöglichkeit der Sonaranlagen in der vertikalen nur geschätzt werden. Der Sonarkontakt ging unmittelbar vor Wasserbombenangriffen meist verloren, weil das angreifende Schiff mit hoher Geschwindigkeit aus einiger Entfernung anlaufen musste, um von den mit Zeitverzögerung in der Tiefe explodierenden Wasserbomben nicht selbst beschädigt zu werden.
Wegen der Eigengeräusche des Schiffs war ab mittlerer Geschwindigkeit sowie im achteren Bereich keine Sonarortung möglich. Auch bereits explodierte Wasserbomben stören diese für einige Zeit. Die Reichweite der Sonaranlagen ist stark von den Wasser- und Wetterverhältnissen abhängig, die Unterscheidung zwischen realen und scheinbaren Ortungszielen oft schwierig. Dies gab den U-Booten, die einmal ihre größtmögliche Tauchtiefe erreicht hatten, gute Möglichkeiten, Wasserbombenangriffen durch eigene Manöver auszuweichen und auch aktiver Sonarortung zu entkommen.
Das typische Aktivsonar war das Suchstrahl-Sonar („Search Light Sonar“) im Frequenzbereich zwischen 15 kHz und 40 kHz. Dabei wurden jeweils kurze Schallimpulse, sogenannte Pings, ausgesendet.
Die Überdeckung eines Sektors mit Aktivsonar war wegen der Signallaufzeit (für jeden Winkel-Schritt) sehr zeitaufwändig. Deswegen war eine Gebietsüberwachung wenig erfolgreich. Im Gegensatz dazu ist beim Radar trotz ähnlichem Funktionsprinzip eine Gebietsüberwachung möglich, weil dabei elektromagnetische Wellen genutzt werden können, die in Luft eine um mehrere Größenordnungen höhere Ausbreitungsgeschwindigkeit haben als Schallwellen in Wasser.
Sobald der Kontakt zu einem Objekt aufgenommen wurde, kann ein Suchstrahl-Sonar das Ziel gut halten. Eine Hilfe bietet dabei die „Split-Beam“-Technik, bei der mit einem zweigeteilten Empfänger festgestellt werden kann, ob sich das Ziel aus der Strahlachse herausbewegt.
Das Panorama-Sonar (englisch PPI – Plane Position Indication) kam erst nach dem Zweiten Weltkrieg auf. Damit wird rundum oder sektorweise gesendet, und beim Empfang wird simultan (oder sehr schnell elektronisch geschwenkt) mit einer elektronischen Richtungsbildung des Strahls durch entsprechende Phasen- beziehungsweise Laufzeitänderungen ein Sektor- oder Rundumbild von einem Sonarping gebildet. Dies war die gängige Technik der ersten 20 Jahre nach dem Zweiten Weltkrieg.
Eine wesentliche Neuerung der 1970er Jahre war die Einführung von Schleppantennen (englisch Towed Array Sonar, TAS). Bei diesem passiven Ortungssystem wird eine Kette von Hydrophonen in einem ölgefüllten Schlauch an einem langen Kabel hinter dem Schiff hergeschleppt. Durch das Öl schwebt der Schlauch ohne Auftrieb unter Wasser. Zwischen Hydrophon-Schlauch und Schleppkabel sind mechanische Dämpfer zur akustischen Entkopplung angebracht, damit Vibrationen des Schiffs möglichst wenig störenden Einfluss haben. Mit dieser Technik können sehr tiefe Frequenzen bis unter 100 Hz nutzbar gemacht werden. Sie werden im Tiefwasser wenig gedämpft, können aber mit einer Antenne am Schiff nicht entkoppelt werden und erforderten wegen der großen Wellenlänge sehr große Abmessungen.
Die neueste Entwicklung ab etwa 1985 ist das aktive tieffrequente Schleppsonar oder LFAS (Low Frequency Active Sonar), das bei Frequenzen unter 2 kHz arbeitet, zum Teil bei wenigen hundert Hz.
Während des Kalten Krieges wurde ein erheblicher Aufwand für die Entwicklung der Sonartechnik getrieben, parallel zu den großen Fortschritten in der U-Boot-Technik. Auch nach dem Ende des Kalten Krieges ist die Sonartechnik von großer Bedeutung wegen der unterseeischen terroristischen Bedrohung und der Entwicklung unbemannter Unterwasserfahrzeuge (UUV, Unmanned Underwater Vehicles), vor allem der autonomen Unterwasserfahrzeuge (AUV, Autonomous Underwater Vehicles), die zunehmend die Seekriegssituation bestimmen.
Sonarforschungsinstitute sind in den USA das United States Naval Research Laboratory, in der NATO das NATO Undersea Research Centre in La Spezia, Italien, und in Deutschland die Wehrtechnische Dienststelle für Schiffe und Marinewaffen, Maritime Technologie und Forschung.
Aktives Sonar

Es gibt niederfrequente (50 Hz bis 3 kHz), mittelfrequente (3 kHz bis 15 kHz) und hochfrequente Aktivsonare.
Niederfrequente Sonare werden als Weitbereichssonare mit Übertragungsdistanzen von über 20 km oder Überwachungs(Surveillance)-Anlagen für die U-Jagd, d. h. die Ortung von U-Booten verwendet. Dies ergibt sich aus der geringen Dämpfung tiefer Frequenzen. Die Ausführung erfolgt normalerweise als Schleppsystem. Mittelfrequente Anlagen sind die traditionellen U-Jagdanlagen. Das Torpedosonar im Kopf eines Torpedos verwendet 20 kHz bis 60 kHz. Minenjagd- und Minenmeidesonare verwenden Frequenzen über 100 kHz wegen der erforderlichen hohen Auflösung und des geringen Entfernungsbedarfs. Seitensichtsonare sind abbildende Sonaranlagen, die in der Forschung und der Minenjagd eingesetzt werden.
Im zivilen Bereich werden beispielsweise Fischschwärme mit der Fischlupe geortet. Die Abgrenzung zum Echolot ist dort fließend. Neben der Ortung der Fischschwärme werden gerade in der pelagischen Schleppnetzfischerei auf dem Prinzip des Echolots basierende Netzsonden eingesetzt, die sowohl die Tiefansteuerung des Fanggeschirrs ermöglichen, wie auch die Überwachung des Abstandes der Scheerbretter oder der Netzgeometrie.[2][3]
Der Vorteil des Aktivsonars gegenüber dem Passivsonar besteht darin, dass es neben der Richtung auch die Entfernung zum Ziel einfach bestimmen kann und dass es auch für Ziele geeignet ist, die keine Geräusche abstrahlen. Daher sind Minenjagd- und Minenmeidesonare immer Aktivsonare. Ihr Nachteil besteht darin, dass sie die Anwesenheit eines aktiv sendenden Sonarträgers deutlich über die Auffassreichweite der Anlage hinaus verraten und dass sie eine Belastung für die Umwelt, insbesondere für Meeressäuger, darstellen können. U-Boote verwenden Aktivsonar – wenn überhaupt – nur äußerst sparsam.
Sogenannte Search Light-(„Suchscheinwerfer“-)Sonare sind mittlerweile veraltet und finden kaum noch Anwendung. Bei dieser Anlagenart wird der Sender/Empfänger mechanisch gedreht. Dadurch kann man immer nur in eine Richtung detektieren. Die meisten heutigen U-Jagd-Sonare (außer Schleppsonare) verwenden eine Kreis- oder Teilkreisanlage. Dort werden die Sender/Empfänger im Kreis und zu mehreren übereinander angeordnet. Auf diese Art kann man gleichzeitig alle Richtungen überwachen und trotzdem gezielt detektieren. Elektronisch kann man dann einzelne Gruppen oder auch alle ansteuern und so einen Rundum-Ping senden oder aber nacheinander gestaffelt pingen.
Passives Sonar

Das passive Sonar besteht aus mindestens einem Hydrophon (Unterwasser-Mikrofon) und wird verwendet, um Unterwassergeräusche und andere akustische Signale aufzuspüren. Das passive Sonar sendet selbst keine Schallwellen aus und ist daher, im Gegensatz zum aktiven Sonar, nicht zu orten.
Normalerweise werden umfangreiche Hydrophonanordnungen zur Richtungsbestimmung und zur Trennung des gesuchten Geräusches von anderen Geräuschquellen angewendet. Damit wird die Richtung des Zieles bestimmbar, aber nicht seine Entfernung. Die Entfernung versucht man durch aufwendige Strategien mit Algorithmen, die die eigene Bewegung und die mutmaßliche Entfernung des Ziels mit Hilfe der Änderung der Richtungspeilung auszuwerten (Target Motion Analysis – TMA). Ein anderer, neuerer Ansatz versucht aus der vertikalen Verteilung des Schallfeldes durch inverse Modellierung den Abstand (und die Tiefe) des Zieles zu bestimmen.
Passivsonar wird vor allem von U-Booten eingesetzt, weil es den Standort dieses U-Bootes nicht durch Schallemission verrät. Seit etwa 1975 verwendet man auch akustische Schleppantennen von bis zu mehreren Kilometern Länge, um von Oberflächenschiffen U-Boote mit Hilfe der schwer verringerbaren tieffrequenten Abstrahlung zu orten. Erfolge bei der Geräuschminderung von U-Booten schränken jedoch die Verwendbarkeit inzwischen ein. Deswegen ergänzt man diese Schleppantennen wieder durch akustische Sender (Active Adjunct), man geht also wieder zum Aktivsonar über (bei der Ortung durch Oberflächenschiffe, nicht von U-Booten aus).
Oberflächenschiffe sind im Allgemeinen vor allem durch das Kavitationsgeräusch zu orten, das durch den Kollaps von Blasen hervorgerufen wird, die durch „Reißen“ des Wassers im Unterdruckbereich des Propellers entstehen. Es können aber auch die Geräusche des Antriebsdieselmotors, Pumpengeräusche, Getriebegeräusche, alle möglichen Knack- und Klappergeräusche (Transienten) und sonstige Geräusche geortet werden, die auch die Klassifizierung der Art der Geräuschquelle ermöglichen können.
Bi- und multistatisches Sonar
Um den optimalen Kompromiss zwischen den Eigenschaften des Aktiv- und des Passivsonars zu finden, wendet man sich neuerdings dem bi- bzw. dem multistatischen Sonar zu. Bei einem bistatischen Sonar handelt es sich im Prinzip um ein Aktivsonar, bei dem sich jedoch der Sender auf einer anderen Plattform als der Empfänger befindet. Beide können sehr weit voneinander entfernt sein. Der Vorteil besteht darin, dass so durch das Aktivsignal der Empfänger nicht verraten wird. Dadurch kann sich der Gegner beim militärischen Sonar taktisch nicht so leicht auf die Situation einstellen.
Der Nachteil besteht darin, dass Sender und Empfänger auf irgendeine Weise koordiniert werden müssen, um den Vorteil der Entfernungsbestimmung und damit der schnellen Zielpositionierung zu nutzen. Es ist auch viel schwieriger, die Leistungsfähigkeit der Anlage abzuschätzen und ein vernünftiges Display aufzubauen.
Beim multistatischen Sonar werden mehrere Empfänger (jeweils auf einer eigenen Plattform, also beispielsweise Schiff oder U-Boot) für einen Sender, unter Umständen auch mehrere Sender verwendet, die alle miteinander koordiniert werden müssen. Dies führt schließlich zu verteilten Systemen.
Einzelne Sonartypen




Neben den genannten grundsätzlichen Sonarversionen gibt es eine Reihe Sonare, die sich durch Aufbau und Anwendung unterscheiden:
HMS
HMS steht für englisch Hull Mounted Sonar (Rumpfmontiertes Sonar). Das (U-Jagd-)Sonar ist direkt am Schiff befestigt, am häufigsten in einem speziellen Wulst am Bug (Bugsonar, Bow Sonar). Dieser Wulst hat eine andere Form und einen anderen Zweck als der heute verbreiteten Wulstbug zur Minderung des Strömungswiderstandes. Der eher linsenförmige Sonar-Wulst liegt vorne und eher tiefer als die tiefste Stelle des Rumpfs, um gute Sicht nach vorne und hinten zu erreichen.
TAS
TAS (englisch Towed Array Sonar), Schleppantennen-Sonar oder Schleppsonar, bezeichnet ein passives tieffrequentes Sonar für die U-Jagd. Es wird als lange Linienantenne, einem Schlauch mit Hydrophonen, nach einem Kabel hinter dem Schiff hergeschleppt. Dadurch kann die Antenne in der günstigsten Tiefe betrieben werden und ist vom Geräusch der eigenen Plattform entfernt.
FAS
FAS (englisch Flankarray Sonar), Seitenantennen-Sonar, bezeichnet bei U-Booten ein passives Sonar an beiden Seiten des Rumpfes.
LFAS
LFAS (englisch Low Frequency Active Sonar), tieffrequentes aktives Sonar, bezeichnet aktive Sonare mit tiefen Frequenzen je nach Typ zwischen ca. 100 Hz und 3 kHz.
VDS
VDS (englisch Variable Depth Sonar): Sonar für variable Tiefen, bezeichnet ein Schleppsonar, das im Gegensatz zum neueren TAS oder LFAS keine lange Linienantenne, sondern ein kompaktes Gerät, das an einem Kabel hinter dem Schiff geschleppt wird, verwendet.
Minenjagdsonar
Minenjagdsonar (z. B. Minenjagdsonar DSQS11M) sind hochfrequente Sonare zur Detektion und Klassifikation von Seeminen (Grund-/Ankertau-Minen). Die Identifikation erfolgt anschließend optisch durch Minentaucher oder Drohnen.
Minenmeidesonar
Minenmeidesonare sind hochfrequente Aktivsonare zur Warnung vor Minen.
Tauchsonar
Ein Tauchsonar englisch Dippingsonar ist ein Sonar, das vom Hubschrauber aus abgehängt wird. Früher wurden auch einfache Hydrophone verwendet, daher ähnlich wie eine Sonarboje, heute werden vorzugsweise Aktivsonare ähnlich einem VDS genutzt.
Sonoboje (Sonarboje)
Sonobojen (Sonarbojen) werden zur U-Jagd vom Flugzeug oder Hubschrauber aus abgeworfen. Sie hängen ein Hydrophon in einer vorgegebenen Tiefe ab und senden empfangene Signale über UHF-Funkfrequenzen zum Flugzeug zurück. Es gibt auch kompliziertere Sonobojen mit mehreren Hydrophonen zur Richtungsbildung und aktive Sonobojen.
Passive Sonobojen können auch unbemerkt zum Aufnehmen von akustischen „Fingerprints“ von Über- und Unterwasserfahrzeugen eingesetzt werden. Dafür werden sie auch von Schiffen/Booten ausgesetzt.
Seitensichtsonar
Das Seitensichtsonar (englisch Side-Scan-Sonar) ist ein abbildendes Sonar für die Forschung und für die Minenjagd.
Schädigende Auswirkungen auf Meeressäuger
Wie aus Autopsien von gestrandeten Meeressäugern hervorgeht, stehen seit 1985 eine ganze Reihe von Delfin- bzw. Walstrandungen in Zusammenhang mit der militärischen Nutzung von Sonargeräten.
Im Dezember 2001 räumte die US Navy eine Mitschuld an der Strandung und dem Tod mehrerer Meeressäuger im März 2000 ein.[4] Der von ihr mitverfasste Zwischenbericht[5] kommt zu dem Schluss, dass die Tiere durch das aktive Sonar einiger Navy-Schiffe getötet oder verletzt wurden.
Für die dB-Einheit bei Wasserschall-Druck wird die Bezugsgröße 1 µPa verwendet, bei Luftschall 20 µPa. Für identische Absolutdrücke liegt daher der Wasserschall-Druckpegel um 26 dB höher,[6] ein für Wasser angegebener Schalldruckpegel von 26 dB entspricht einem Schalldruckpegel von 0 dB für Luft (etwa menschliche Hörschwelle). (Die Bezugsgrößen für Intensitätspegel unterscheiden sich noch stärker, der Bezugswert ist für Luft 10−12 Watt/m² und für Wasser 6,7·10−19 Watt/m², so dass sich bei gleichem Absolutwert ein Unterschied von 61,7 dB ergibt.)[6]
Die im militärischen Bereich eingesetzten aktiven Niederfrequenz-Sonarsysteme (Low Frequency Active Sonar, LFAS) können mit ihrem Schalldruck von bis zu 240 Dezibel Meeressäuger wie Wale und Delfine erschrecken, betäuben und vermutlich durch darauf folgende zu schnelle Tiefenänderungen (Dekompressionskrankheit) auch töten.[7] können ähnlich hohe Schalldrücke erzeugen. Hinter dem Kopf von Pottwalen wurden Ortungssignale von lediglich bis zu 180 Dezibel gemessen, der Schalldruckpegel vor dem Kopf liegt wohl um bis zu 40 Dezibel höher[8], mithin um den Faktor 8 weniger als die militärischen Systeme. Für Blauwale werden mehr als 180 Dezibel angegeben.[9]
Die untersuchten Tiere weisen schwere physiologische Schäden auf, unter anderem Gehirnblutungen, Gefäßverletzungen, Bläschenbildungen im Blut und Herz-Kreislauf-Kollapse. Es muss zudem von einer hohen Dunkelziffer ausgegangen werden, da Tiere, die auf dem offenen Meer sterben, auf den Meeresgrund sinken und unentdeckt bleiben.
Siehe auch
- SODAR
- Radargrammetrie
- Sound Surveillance System
- Menschliche Echoortung
- Seitenlinienorgan – Fische nehmen Druckschwankungen ausgelöst durch Bewegungen auf
Literatur
- Robert J. Urick: Principles of Underwater Sound. 2nd edition. McGraw-Hill Book Company, New York NY 1975, ISBN 0-07-066086-7.
- Heinz G. Urban: Handbuch der Wasserschalltechnik. STN Atlas Elektronik, Bremen 2000.
- Gerhard Aretz: Sonar in Theorie und Praxis für Unterwasser-Anwendungen. Monsenstein und Vannerdat, Münster 2006, ISBN 3-86582-393-9.
- Philippe Blondel, Bramley J. Murton: Handbook of seafloor sonar imagery. Wiley u. a., Chichester u. a. 1997, ISBN 0-471-96217-1 (Wiley Praxis Series in Remote Sensing).
- Harrison T. Loeser (Hrsg.): Sonar engineering Handbook. Peninsula Publishing, Los Altos CA 1992, ISBN 0-932146-02-3.
- Verlassen die Sonare das Schiff? In: Hansa – International Maritime Journal. Januar 2003, S. 38–42.
Weblinks
- Klangbeispiel eines Sonars (MP3) whalesong.info
- Unterwasserlärm: Wale im Dauerstress. Greenpeace, 22. November 2007
- Why whales strand – the deadly hunt for submarines. Sounds Of The Seas, 2011
Einzelnachweise
- Sonar. duden.de; abgerufen am 13. August 2011.
- Trålsonde. Scanmar, abgerufen am 5. Oktober 2018 (amerikanisches Englisch).
- Netzsondensysteme. Thünen-Institut, abgerufen am 5. Oktober 2018.
- Navy Admits Sonar Killed Whales. Science, 7. Januar 2002; abgerufen am 26. Januar 2022.
- Joint Interim Report, Bahamas Marine Mammal Stranding, Event of 15-16 March 2000, (Memento vom 4. Oktober 2013 im Internet Archive) (PDF; 1,6 MB) bahamaswhales.org, Dezember 2001; abgerufen am 2. September 2013.
- Reinhard Lerch, Gerhard Martin Sessler, Dietrich Wolf: Technische Akustik. Grundlagen und Anwendungen. Springer, Berlin / Heidelberg 2009, ISBN 978-3-540-23430-2, S. 539 (Kapitel 17.1 Schallausbreitung im Wasser).
- Ulf Marquardt: Höllenlärm im Reich der Stille. (PDF) WDR, 9. Oktober 2007, abgerufen am 9. Mai 2017.
- Mit dem Mikrophon in die Tiefsee. NZZ.ch, 20. November 2002; abgerufen am 28. September 2011.
- Unsere tierischen Freunde – wahre Superohren. Planet Schule; abgerufen am 28. September 2011.