Echolot
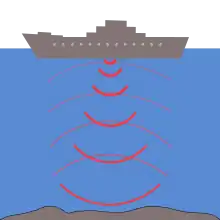
Das Echolot ist ein in der Schifffahrt verwendetes Gerät zur elektroakustischen Messung von Wassertiefen (Lotung). Gemessen wird die Zeit, die zwischen der Aussendung eines Schallimpulses (Wasserschall) und der Ankunft der vom Gewässerboden reflektierten Schallwellen verstreicht. Man unterscheidet zweckmäßig zwischen Echoloten für die sichere Navigation, solchen für Vermessungszwecke zur Erstellung von Seekarten und Bestimmung des Bedarfs an Baggering insbesondere von Wasserwegen und Forschungsecholoten. Eine sehr ähnliche Funktion haben aktive Sonargeräte. Diese werden aber nicht zur senkrechten Bestimmung der Wassertiefe, sondern für die überwiegend horizontale Unterwasserortung vor allem für militärische Zwecke eingesetzt.
Geschichte

Das Echolot wurde kurz vor dem Ersten Weltkrieg in verschiedenen Staaten gleichzeitig und weitgehend unabhängig voneinander entwickelt. In Deutschland gelang dem Physiker Alexander Behm der Durchbruch mit seinen Reichspatenten Nr. 310690 vom 7. Januar 1916[1] und Nr. 367202 vom 1. Juni 1920.[2][3] Zur wirtschaftlichen Verwertung seiner Erfindung gründete er 1920 in Kiel die Behm-Echolot-Gesellschaft.
Funktionsweise
Für ein Echolot benötigt man eine impulsartige Schallquelle, den reflektierenden Boden, einen Schallempfänger, eine Einrichtung zur Zeitmessung zwischen dem Sendezeitpunkt des Impulses und Empfang des Echosignals sowie eine Umrechnungsmethode für die Laufzeit in die Entfernung zwischen Sende-/Empfangseinrichtung und dem Boden.
Heute verwendet man vorwiegend kurze sinusförmige, elektronisch erzeugte Signale, die mit einem Schallwandler (engl.: Transducer) – auch Schwinger oder Geber genannt – in ein akustisches Signal gewandelt werden. Als Wandler werden üblicherweise Zylinder aus piezoelektrischem Blei-Zirkonat-Titanat (PZT) verwendet, deren Zylinderhöhe die Resonanzfrequenz und deren Durchmesser die Richtungsauflösung bestimmt. Meist wird mit dem gleichen Schallwandler auch das akustische Empfangssignal in ein elektrisches Signal gewandelt. Die Empfangssignale werden meist mit einem Schreiber in vertikalen Linien dargestellt, moduliert mit der Intensität des Empfangssignales. Dadurch erhält man in der Abfolge dieser Linien eine Profillinie des Meeresbodens. Früher verwendete man dazu ein Wachs-Kohlepapier, bei dem die helle Wachsschicht je nach Intensität des Stromes weggebrannt wurde. Dieser Echogrammschreiber ist heute durch ein elektronisches Display ersetzt, das die gleiche Funktion erfüllt.
Nicht nur der Meeresboden verursacht Echos, sondern auch Fische, Wasserpflanzen und andere Objekte. Besonders wirksame Reflektoren sind Luftblasen. Die Anzeige von Fischen entsteht durch Echos der Luft in den Schwimmblasen der Fische. Der sonstige Fischkörper hat hingegen eine ähnliche akustische Impedanz wie das Wasser und reflektiert den Schall nicht. Diese Echos liefern wertvolle Informationen für Angler und Fischer, beispielsweise über Steilkanten, Löcher und Bewuchs wo sich Fische besonders gern aufhalten. Entsprechend genutzte Echolote nennt man „Fishfinder“.
Je nachdem, ob es sich um ein Navigationslot, ein Vermessungslot oder ein Echolot für die Meeresforschung handelt, unterscheidet sich die Ausgestaltung der Elemente eines Echolotes erheblich, so dass sie getrennt diskutiert werden.
Frequenz, Öffnungswinkel und Pulsfolge
Die verwendete Frequenz hängt von der Aufgabenstellung ab. Die Schalldämpfung im Wasser steigt mit der Frequenz stark an. Tiefwasser-Echolote verwenden deswegen recht tiefe Frequenzen, normalerweise 10 bis 20 kHz. Noch tiefere Frequenzen werden bei Sedimentloten gewählt wegen der starken Dämpfung des Schalls im Boden. Navigationslote nutzen heute überwiegend Frequenzen über 50 kHz.
In der Standardausführung werden zylinderförmige Schallwandler verwendet. Die Zylinderhöhe ist maßgeblich für die Frequenz, während der Zylinderdurchmesser relativ zur Zylinderhöhe (also zur Wellenlänge des Schalls) maßgeblich für den Abstrahlwinkel ist. Bei 60 kHz und einem Durchmesser des aktiven Wandlerbereichs von 5 cm beträgt der Winkelbereich etwa 30°. Abstrahlwinkel nennt man den Bereich, bei denen die Sendeleistung um 3 dB gegenüber dem Maximum des Schallpegels abgefallen ist. Dieser Winkelbereich ist eine Funktion des Wandlerdurchmessers relativ zur Wellenlänge. Der Winkelbereich ist daher annähernd umgekehrt proportional zur Frequenz. Bei hohen Frequenzen erhält man also schon mit kleinen Wandlerflächen eine sehr hohe Auflösung, während bei tiefen Frequenzen für Tiefseelote ganz erhebliche Wandlerdurchmesser erforderlich wären, die sich mit einzelnen Wandlerelementen technisch nicht mehr verwirklichen lassen. Man verwendet dann Gruppen von Wandlern, um die erforderliche Bündelung zu erreichen.
Die Pulsfolgefrequenz, also wie häufig eine Echolotung vorgenommen werden kann, hängt vor allem von der Wassertiefe, dem für die graphische Darstellung eingestellten Tiefenbereich und der Sendeleistung ab. Bevor ein neuer Impuls gesendet wird, muss das Bodenecho natürlich abgewartet werden. Wenn die Sendeleistung zu hoch eingestellt ist, kann aber das an der Meeresoberfläche reflektierte Signal erneut wie das ursprüngliche Sendesignal abgestrahlt werden. Dadurch können sehr ähnliche Bodenprofile bei genau doppelter Tiefe auftreten, die dann bei zu schneller Pulsfolge nach dem nächsten Sendesignal empfangen werden und daher vor dem Echo dieses folgenden Signals empfangen werden und ein Tiefenprofil mit wesentlich geringerer Tiefe als das richtige Sendesignal vortäuschen (Phantomecho). Die Sendeleistung muss deswegen wassertiefenabhängig eingestellt werden. Bei modernen Lotanlagen wird dies durch Regelung der Empfangsverstärkung und Anpassung der Sendeleistung auf den eingestellten Tiefenbereich automatisch vorgenommen. Bei zu geringer Einstellung des Wassertiefenbereiches können dennoch Phantomechos vorkommen. Für Sedimentecholote und seismische Lote stellen derartige Mehrfachechos ein erhebliches Problem dar.
Während die Signallänge eines Lotsignals üblicherweise bei größenordnungsmäßig 1 ms liegt, ist die Pulsfolgefrequenz aus den genannten Gründen bei einem Tiefenbereich von 100 m mindestens 1,4 s.
Fußabdruck
Durch den Öffnungswinkel ergibt sich am Boden ein flächiger Messbereich (engl. footprint, Fußabdruck), dessen Durchmesser proportional zur Tiefe zunimmt. Bei einem großen Fußabdruck setzt das Echo abrupt von der Stelle her ein, die innerhalb des Fußabdruckes dem Echolot am nächsten liegt, also nur bei konstanter Wassertiefe direkt unter dem Schiff. Der Echopegel nimmt an den „Rändern“ des Fußabdruckes nicht abrupt ab, wie es das schematische Abbild vortäuscht, sondern allmählich. Starke Reflektoren außerhalb des Fußabdruckes können also auch Echos liefern.
|

Messbereich
Der Tiefenmessbereich ist abhängig von Sendeleistung, Frequenz, sowie Störgeräuschen und Empfindlichkeit. Bei Echoloten für Tiefwasser werden Frequenzen zwischen 15 und 50 kHz verwendet. Bodenechos aus bis 100 m sind schon mit 200 kHz erreicht.
Zweidimensionale Lotstreifen
Das konventionelle Echolot liefert je gesendetem Schallsignal (Ping) nur einen Tiefenwert, in der Abfolge also ein Tiefenprofil auf einer Linie. Für Meeresbodenkartierungen ist dies unbefriedigend, weil das Messschiff ein enges Netz von Linien abfahren muss, um eine hinreichend zuverlässige flächige Tiefenkarte zu erzeugen. Es gibt zwei Möglichkeiten von dieser Lotlinie zu einem Lotstreifen bei einem Überlauf zu kommen und damit die Zahl notwendiger Überläufe zu verringern. Bei beiden handelt es sich um sogenannte Multibeam-Echolote. Man kann eine ganze Reihe von Loten nebeneinander anordnen, die jeweils mit kleiner Winkelauflösung parallele Lotlinien aufnehmen (Flächenlot), oder man kann das gleiche mit einer Echolotanlage hoher Winkelauflösung mit mehreren Lotstrahlen unterschiedlicher Winkellagen nebeneinander erreichen (Fächerlot).


Schwingereinheit ausgefahren
Das Flächenecholot dient der Vermessung in sehr flachen Gewässern, insbesondere Flüssen, Kanälen und Hafengebiete. Dafür wird eine ganze Reihe von Schwingern nebeneinander mit definiertem Abstand und geringem Öffnungswinkel eingesetzt. Benachbarte Schwinger werden gleichzeitig mit unterschiedlichen hohen Sendefrequenzen betrieben. Sendefrequenzbereich, Öffnungswinkel und Schwingerabstand bestimmen sich nach der Messtiefe und dem Sohlezustand des Messgebietes und können in der Regel eingestellt oder verändert werden.[4][5]
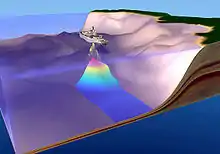
Beim Fächerecholot nimmt die Gesamtbreite des Lotstreifens proportional zur Tiefe zu. Es ist daher bei sehr geringer Wassertiefe im Vergleich zum Flächenecholot ungeeignet, das umgekehrt bei größerer Wassertiefe nicht mehr einsetzbar ist.
Beim Fächerecholot wird mit einer Gruppe von Wandlern in Längsrichtung eine Senderichtkeule hoher Bündelung (beispielsweise 1,5°), aber großer Breite von bis zu etwa 150° quer zur Fahrtrichtung gebildet, also eine Richtkeule in Form eines Fächers. Empfangsseitig wird eine Wandlergruppe quer zur Fahrtrichtung verwendet. Diese Wandler werden durch Laufzeitverzögerung oder Phasendrehung der Empfangssignale so zusammengeschaltet, dass gleichzeitig in Querrichtung eine große Zahl von hochauflösenden Einzelkeulen gebildet wird. Man kann sich dies so vorstellen, dass ein hochauflösender Strahl elektronisch geschwenkt wird. Würde man dies seriell, von Ping zu Ping durchführen (wie beim Radar üblich), würde dies wegen der im Vergleich zur Lichtgeschwindigkeit geringen Schallgeschwindigkeit zu viel Zeit erfordern. Deswegen werden die Empfangsrichtkeulen gleichzeitig gebildet. Je nach Verteilung der Strahlen quer zur Fahrtrichtung entsteht ein Fächer von 120 bis 150° Breite. Die Fächeröffnung kann bei modernen Systemen dem Gewässerprofil, der Schiffsgeschwindigkeit und der Wassertiefe angepasst werden. Zur Vermessung von Hafenanlagen werden Fächerwinkel bis zu 210° verwendet. Der Fächer erfasst Streifen des Meeresbodens entlang des Schiffskurses. Je größer die Wassertiefe, desto breiter ist der erfasste Streifen.
Fügt man mehrere überlappende Streifen zusammen, kann daraus ein digitales Geländemodell berechnet und schließlich eine topografische Karte erstellt werden. Voraussetzung für die Vermessung mit einem Fächerecholot ist ein hochgenauer Lagesensor, mit dessen Daten man die Verfälschung der Tiefendaten durch die Schiffsbewegung korrigieren kann. Dies ist nicht unproblematisch:
- wird der Fußabdruck mit flacher werdendem Winkel immer größer und der Echosignaleinsatz unschärfer, weil er nicht mehr vom nächsten Punkt des Meeresbodens, sondern vom „Rand“ des Fußabdrucks stammt;
- führen Winkelfehler zu großen Abstandsfehlern und damit zu großen Fehlern der errechneten Wassertiefe; und
- werden flachere Strahlen bei geschichtetem Wasser gebrochen, was zu sehr großen Messfehlern führen kann, wenn dies nicht genau berücksichtigt wird.
Berücksichtigung der Schallgeschwindigkeit im Wasser
Echolote messen die Zeit von der Aussendung des Sendeimpulses bis zum Empfang des Echos, geben aber üblicherweise die Wassertiefe, also eine Entfernung an. Die Umrechnung erfolgt mit Hilfe der Schallgeschwindigkeit, die nicht konstant ist, sondern von der Temperatur, dem Salzgehalt und dem Druck abhängt. Die Annahme einer konstanten Schallgeschwindigkeit, bei Echoloten üblicherweise 1480 m/s, führt zu Tiefenfehlern von bis zu 5 %, was für viele Einsatzzwecke der Lote vertretbar ist. Häufig kann die Schallgeschwindigkeit eingestellt werden. Dann ist in Süßwasser eine Schallgeschwindigkeit von 1450 m/s zweckmäßiger, womit der Tiefenfehler auf weniger als 2 % reduziert wird.
Für genaue Messungen müssen diese Parameter jeweils bestimmt und bei der Umrechnung der Laufzeit in eine Wassertiefe berücksichtigt werden. Dazu existieren verschiedene empirische Formeln. Einfache Näherungsformel:

Es bedeuten:
- c = Ausbreitungsgeschwindigkeit (m/s)
- T = Wassertemperatur (°C)
- S = Salzgehalt (‰)
- D = Wassertiefe (m)
Diese empirische Formel beschreibt für 0 °C < T < 40 °C und 0 ‰ < S < 40 ‰ den Zusammenhang.
Arten von Echoloten
Es gibt sehr unterschiedliche Echolote, vom Handecholot[6] bis zu Tiefsee-Fächerloten, deren Einbau selbst bei großen Forschungsschiffen konstruktive Berücksichtigung erfordert.
- Die häufigsten Echolote sind die Navigationslote, die sich auf nahezu allen Wasserfahrzeugen von größeren Freizeit-Segel- und -Motorbooten aufwärts befinden und häufig mit der Funktion eines Fischfinders verknüpft sind.
- Vermessungslote haben wesentlich höhere Anforderungen an die Genauigkeit der Wassertiefenbestimmung und die Positionierung der Tiefenmessung zu erfüllen.
- Forschungslote sind nicht ohne Weiteres von Vermessungsloten abzugrenzen, haben aber ein breiteres Spektrum von Aufgaben zu erfüllen.
Navigationslote und Fischfinder
Navigationslote dienen in erster Linie der Vermeidung von Grundberührung des Trägerfahrzeugs und zur Unterstützung der sicheren Navigation. Sie verfügen normalerweise über einen Lotschreiber oder in modernerer Form ein meist farbiges Display. Für den Schutz gegen Grundberührung ist es nicht erforderlich, dass das Lot genug Sendeleistung für Tiefenbereiche von einigen 100 m hat. Auch die Anforderungen an die Bestimmung der Tiefengenauigkeit nehmen mit zunehmender Wassertiefe unter dem Kiel ab. Es ist also nicht erforderlich, die Schallgeschwindigkeit für die Umrechnung von Echozeit auf Wassertiefe zu korrigieren. Ferner benötigt ein Navigationslot keine hohe Winkelauflösung. Innerhalb des Fußabdrucks wird immer der nächste Punkt gemessen, welcher bei einem großen Messwinkelbereich nur unmittelbar unter dem Schiff oder in geringerem Abstand liegen kann. Bei geringer Winkelauflösung ist eine Vertikalstabilisierung zum Ausgleich der Krängung nicht erforderlich.
Außer als Warnung vor unmittelbarer Grundberührung sind Navigationslote wichtige Navigationshilfsmittel. Die geplanten Kurse werden von der Schiffsführung mit Bleistift in Seekarten eingezeichnet, in der sich auch Tiefenlinien und einzelne Tiefenmesswerte bezogen auf das Seekartennull befinden. Ein Vergleich dieser Tiefen mit den Lottiefen liefern Hinweise auf die richtige Navigation. Außerdem ist es in Revieren mit starken Wassertiefenschwankungen häufig nötig, auch Kurse zu hoher Tide zu durchfahren, die nach Seekartenangabe (Wassertiefe bei tiefstem zu erwartenden Wasserstand) nicht ausreicht. Das Echolot gibt also zusammen mit der Seekarte Auskunft über den aktuellen Wasserstand. Aber auch für diesen Zweck ist eine hohe Genauigkeit bei großen Wassertiefen nicht erforderlich, weil wegen der zu erwartenden Tiefenschwankungen eine längere Prognose bis zum Erreichen der Untiefe nicht mehr genau ist.
Luftblasen sind sehr gute akustische Reflektoren. Deswegen liefern Fische gut erkennbare Echos. Die Echos werden praktisch nur von der Schwimmblase und nicht vom ganzen Fisch ausgelöst, dessen Dichte und Kompressibilität der des umgebenden Wassers zu ähnlich ist. Man kann also im Echolot nicht die Form erkennen und selbst mit großer Erfahrung nur sehr begrenzt aus der Stärke des Echos seine Größe abschätzen. Trotzdem liefert das Echolot damit dem Fischer oder Angler wichtige Informationen über die Zahl von Fischen unter dem Boot. Aus diesem Grund werden Echolote gern als „Fischfinder“ benutzt. Während man für die Navigationslotfunktion keine hohe Auflösung anstrebt, ist sie bei der Fischfinde-Funktion eher von Vorteil. Deswegen stattet man heute Echolote vor allem im Freizeit-Boot-Sektor mit einer weiteren, deutlich höheren Sendefrequenz aus. Weil die Winkelauflösung proportional zum Schwingerdurchmesser bezogen auf die Wellenlänge ist, fällt sie bei der zweiten, höheren Frequenz (üblicherweise 200 kHz) deutlich höher aus als bei der sonst verwendeten Frequenz von 50 bis 80 kHz.
Größere Schiffe der Berufsfischerei setzen neben der Fischfinderfunktion eines Navigationslotes üblicherweise weitere Speziallote zur Ortung von Fischen und Fischschwärmen ein, mit deren Hilfe Fischschwärme verfolgt werden können und mit deren Hilfe bei der pelagischen Hochseefischerei auch die Netztiefe eingestellt wird. Die Funktionsweise dieser Lote ähnelt oft der eines Fächerecholotes oder eines hochfrequenten Sonargerätes.
Vermessungsecholote
An Echolote für die Tiefenvermessung zur Datengewinnung und -korrektur von Seekarten sowie zur Bedarfsermittlung und Abrechnung in der Nassbaggerei sind völlig andere Anforderungen als an Navigationslote gestellt. Die IHO hat die notwendige Genauigkeit von Tiefen und Positionen festgelegt[4]
| Tiefe | Tiefenfehler | Positionsfehler |
|---|---|---|
| 5 | 1 | 20 |
| 20 | 1,2 | 21 |
| 100 | 2,5 | 25 |
| 500 | 11,5 | 45 |
Diese Fehler enthalten die Summe hinsichtlich aller Messfehler wie Navigationsgenauigkeit, Krängung des Schiffes, Richtigkeit der Schallgeschwindigkeit, Bestimmung des Echozeitpunktes und aktuellem Wasserstand. In Häfen und anderen speziellen Orten sind noch wesentlich höhere Genauigkeiten gefordert. Neben Maßnahmen, die das Echolot nicht betreffen, wie sehr genaue Navigation und Berücksichtigung des aktuellen Wasserstandes, ist bei größeren Wassertiefen für das Echolot die Berechnung der Tiefe mit der aktuell gemessenen Schallgeschwindigkeit und die Verwendung eines gut gebündelten Schwingers erforderlich, der vertikal stabilisiert ist. Die enge Bündelung und vertikale Stabilisierung dient weniger der genauen Lokalisierung des Messpunktes als der Vermeidung von Tiefenfehlern bei geneigten Meeresböden oder krängendem Messschiff.
Außerdem ist es effizienter, Multibeam-Echolote einzusetzen, weil sonst für eine Tiefenvermessung zu engmaschige Lotkurse erforderlich sind. Dabei sind die sogenannten Flächenlote in sehr flachen Gewässern besonders gut geeignet, weil sie die Genauigkeitsanforderungen relativ leicht erfüllen können. Fächerecholote sind bei größeren Wassertiefen in diesem Fall unvermeidbar. Die Genauigkeit der Tiefenmessung nimmt aber mit zunehmendem Abstand der jeweiligen Messstrahlen von der Vertikalen ab, weil sich der Fußabdruck der Messstrahlen vergrößert, was die Auswirkung von geneigten Meeresböden und von Fehlern der Krängungskorrektur vergrößert. Außerdem werden die Messstrahlen bei einer Tiefenabhängigkeit der Schallgeschwindigkeit gebrochen, was selbst bei einer aufwändigen Korrektur zu erheblichen Messfehlern führen kann. Es erfordert die Auswertung durch einen guten Fachmann, der beurteilen kann, bis zu welchen Fächerwinkeln die geforderte Genauigkeit noch erzielbar ist. Aber trotz dieser Einschränkungen ist die Verwendung eines Fächerlotes sinnvoll. Bei Fächerloten ist die Vertikalstabilisierung einfacher als bei Einstrahlloten, weil sie elektronisch über die Zuordnung der Beams zu den Winkeln erfolgen kann. Außerdem können kleinräumige Tiefenabweichungen, die sonst zwischen den Kursmaschen übersehen werden könnten, wenigstens qualitativ erfasst werden, sodass sie durch einen ergänzenden Überlauf genau vermessen werden können.
Echolote für die Forschung
Auf Forschungsschiffen werden häufig spezielle Echolote eingesetzt, die über den Bedarf der allgemeinen Schifffahrt und der Vermessung von Wassertiefen hinausgehen. Dies sind vor allem die häufig sehr aufwändigen Fächerlote, insbesondere für den Tiefsee-Einsatz. Fächerlote benötigen eine hohe Winkelauflösung, also große Schwingeraperturen. Wegen der frequenzabhängigen Schallabsorption ist aber bei großer Wassertiefen eine tiefe Sendefrequenz (10 bis 20 kHz) gefordert. Deswegen sind sehr große Schwingergruppen nötig. Früher wurden insbesondere an den geneigten Schelfrändern sogenannte Schelfrandlote mit niederer Frequenz (10 bis 20 kHz) und hoher Winkelauflösung eingesetzt, die gegen die Krängung stabilisiert sein mussten. Sie sind weitgehend durch Fächerlote verdrängt, bei denen die Stabilisierung elektronisch vorgenommen werden kann. Zudem bietet gerade an den Schelfhängen die dreidimensionale Darstellung der Fächerlote sehr große Vorteile.
Noch tiefere Frequenzen werden für Sedimentlote benötigt, bei denen Echos auch aus dem Meeresboden ausgewertet werden. Sie müssen außerdem über eine hohe Winkelauflösung verfügen, weil fast immer die Bodenoberfläche das stärkste Echo liefert, die schwächeren von Sedimentschichtgrenzen aber von späteren Echos aus dem Fußabdruck verdeckt werden können. Aus dem gleichen Grund ist auch eine hohe Entfernungsauflösung, daher ein sehr kurzes Sendesignal nötig. Beides steht in Widerspruch zu den tiefen Frequenzen.
Aus diesem Grund gibt es eine besondere Form des Sedimentecholots, das parametrische Echolot. Hierbei wird die tiefe Frequenz nicht in Lot selbst erzeugt, sondern es werden zwei hohe Frequenzen gleichzeitig abgestrahlt. Bei sehr hoher Leistungsdichte, ist die Schallausbreitung nicht mehr linear. Es wird dann bei der Übertragung vor dem Schwinger ein Signal aus der Differenz der beiden Pimärfrequenzen gebildet. Dadurch erhält man eine hohe Winkel- und Entfernungsauflösung ohne sehr große Abmessungen des Wandlers. Deswegen lohnt sich dieses Verfahren trotz des geringen Wirkungsgrades bei der Erzeugung der Sekundärfrequenz. Da die Sekundärfrequenz erst im Wasser gebildet ist, setzt das parametrische Echolot aber eine größere Wassertiefe voraus.
Die Härte der Sedimente an der Meeresoberfläche, kann man bei einer speziellen Auswertung des Empfangssignals im Grunde mit jedem Echolot abschätzen, deswegen sind die Echolote auf Forschungsfahrten häufig mit der Fähigkeit zur Echostärkenabschätzung ausgestattet. Dadurch kann der Bedarf an Entnahme von Bodenproben reduziert werden.
 Sediment-Profil
Sediment-Profil Sedimentprofil, mit einem parametrischen Sonar aufgenommen
Sedimentprofil, mit einem parametrischen Sonar aufgenommen
Echoortung
Die Echoortung ist ein eng verwandtes Verfahren, mit dem sich auch die Lage von Objekten, wie Schiffen oder Fischen, bestimmen lässt. Echoortung wird für die U-Boot-Suche und für die Minensuche eingesetzt (aktives Sonar-Verfahren). Hochauflösende Geräte dienen zur Wracksuche und zur Personen- und Leichensuche. Zahnwale und Fledermäuse verwenden die Echoortung zur Orientierung.
Verwandte Verfahren
Vereinzelt wird eine vergleichbare Methode auch in der Luftfahrt verwendet. Das Sonic Altimeter dient zur Höhenmessung von Flugzeugen über Grund.
Das Autofokus-System einiger Fotoapparate arbeitet mit einem Ultraschall-Entfernungs-Messgerät.
Mit dem Geoscanner werden Bodenveränderungen sichtbar gemacht.
Auch der Mensch kann ein gewisses Gefühl für die Größe von Räumen entwickeln, wenn diese etwas Halligkeit aufweisen, was besonders im Dunkeln oder von Blinden genutzt wird.
Bathymetrische Karte
General Bathymetric Chart of the Oceans (GEBCO) ist ein bathymetrischer, weltweiter Datensatz, der auf zusammengetragenen Daten aus Schiffs-Echoloten basiert. Auf den daraus erstellten Karten sieht man die genaue Form des Meeresgrundes mit seinen Rücken und Tälern. Google und OpenSeaMap verwenden solche Karten.
Literatur
- P. C. Wille: Sound Images of the Ocean. Springer Verlag, Berlin 2005, ISBN 3-540-24122-1.
Weblinks
- Videoerklärung zur Echolot und Fishfinder Technik
- Chronik Alexander Behm
- H.-W. Schenke, Johannes Ulrich: Flächenhafte Kartierung des Meeresbodens. In: Geowissenschaften in unserer Zeit. 4, 1986, S. 122–130, doi:10.2312/geowissenschaften.1986.4.122 (PDF; 3,2 MB).
- ELAC: An Introduction to Echosounding. Honeywell-ELAC-Nautik GmbH, Kiel 1982, hdl:10013/epic.44286.d001 (PDF; 27,5 MB).
- NEWS & STORIES VOM 05.02.2006: UNSERE FLIEGENDEN VERWANDTEN IN DER NACHT - Wie die Fledermäuse mit den Ohren "sehen"
Einzelnachweise
- Patent DE310690: Anordnung zur Bestimmung von Meerestiefen und sonstigen Entfernungen unter Wasser. Angemeldet am 7. Januar 1916, veröffentlicht am 26. September 1922, Erfinder: Alexander Behm.
- Patent DE367202: Kurzzeitmesser. Angemeldet am 1. Juni 1920, veröffentlicht am 23. Januar 1923, Erfinder: Alexander Behm.
- Patentschriften als PDF siehe Alexander Behm: Dokumente, Downloads, abgerufen am 12. Januar 2014.
- Lisa-Maria Mic: Gegenüberstellung hydrographischer Messmethoden zur Gewässeruntergrundmessung von Fließgewässern und Seen. (PDF, 11,7 MB) In: Diplomarbeit. Juli 2013, S. 25–26, abgerufen am 7. März 2014.
- EA MCU – Hydrografisches Flächenecholot. Kongsberg Maritime AS, abgerufen am 7. März 2014.
- Bobby Schenk, Trick-siebzehn an Bord(100)