Seitensichtsonar
Das Seitensichtsonar (englisch side-scan sonar, Kurzform: SSS; Sonar: Sound Navigation And Ranging) ist eine auf Schall basierende Technik zur Ortung und Klassifizierung von Objekten im Wasser oder auf dem Grund von Gewässern jeder Art. Die Anwendungsmöglichkeiten sind vielseitig: Es wird sowohl in der Wissenschaft (Geologie, Unterwasser-Archäologie und Biologie), im gewerblichen Bereich (Schifffahrt allgemein, Fischerei) als auch im militärischen Bereich (U-Boot-Jagd, Minenortung etc.) eingesetzt. Rettungsorganisationen verwenden hochauflösende Sonar-Systeme zur Ortung Ertrunkener.
Echolote (Echo-Sounder), Fächerecholote (Multibeam-Echosounder) und Sedimentsonare (Subbottom-Profiler) sind Systeme, die auf den gleichen technischen Grundlagen basieren, jedoch mit anderen Frequenzen und Messgeometrien arbeiten; auch die Art der Datenauswertung unterscheidet sich zum Teil erheblich von den bei Seitensichtsonaren angewendeten Methoden.
Mit Seitensichtsonar können Objekte geortet werden, die mit optischen Mitteln in trübem Wasser nicht aufzufinden sind. Die Frequenzen, mit denen Seitensichtsonare betrieben werden, bewegen sich zwischen 6,5 kHz und 1 MHz, die Reichweite kann zwischen wenigen Metern und 60 km betragen und die Auflösung reicht von wenigen Zentimetern bis zu 60 m[1]; wie bei allen auf der Emission von Wellen basierten Systemen (Radar/Bodenradar, Lidar) gilt auch für Sonar-Systeme der Zusammenhang zwischen Frequenz, Auflösung und Reichweite: höhere Frequenzen bringen eine bessere Auflösung bei einer geringeren Reichweite. Viele moderne Systeme können deshalb mit verschiedenen Frequenzen betrieben werden, um sie möglichst vielseitig einsetzen zu können.
Grundlagen
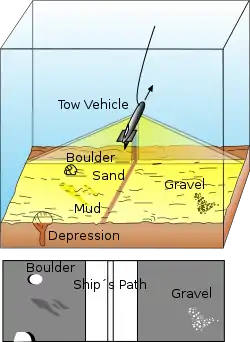
Die grundsätzliche Funktionsweise aller Sonar-Systeme ist immer gleich: Es wird eine Schallwelle erzeugt, deren Echo registriert und aus der gemessenen Laufzeit der Welle die Entfernung zum reflektierenden Objekt errechnet. Bei herkömmlichen Sonar-Systemen wird der Schall gebündelt und in eine genau definierte Richtung emittiert; aus der Laufzeit des Echos kann daher die Lage des reflektierenden Objektes im dreidimensionalen Raum errechnet werden. Anders verhält es sich beim Seitensichtsonar: Hier werden gleichzeitig zwei fächerförmige Impulse ("pings") quer zur Fahrtrichtung des Schiffes ausgesendet, jeweils einer nach links und einer nach rechts. Diese zwei Pings erzeugen durch ihre breite Fächerform eine große Anzahl an Echos, ohne dass jedoch die Richtung, aus der diese Echos kommen, bekannt wäre; die einzigen bekannten Parameter sind die Dauer ihrer Laufzeit und ihre Intensität. Es ist daher nicht möglich, mit herkömmlichen Methoden aus diesen Daten dreidimensionale Geländemodelle zu erstellen, vielmehr ähneln die Ergebnisse Luftbildern: Auch in diesen sind keine dreidimensionalen Daten enthalten, sie stellen lediglich die Projektion einer Szene auf eine Ebene dar.
Literatur
- Gerhard Aretz: Sonar in Theorie und Praxis für Unterwasser-Anwendungen. Monsenstein und Vannerdat, Münster 2006, ISBN 3-86582-393-9.
Weblinks
Einzelnachweise und Fußnoten
- Blondel, Philippe: The Handbook of Sidescan Sonar. Chichester, UK, 2009, S. 8