Kreiseltheorie
Die Kreiseltheorie beschäftigt sich mit rotierenden Körpern, bei denen Verschiebungen im Raum und Formänderungen von untergeordneter Bedeutung sind.[1]
Körper, auf die diese Beschreibung zutrifft, werden in der Theorie zusammenfassend als Kreisel bezeichnet und beinhalten so verschiedene Objekte wie Stehaufkreisel, Langgeschosse oder die Erde. Die Kreiselbewegungen sind für Mathematik, Physik und Ingenieurwesen – somit für Theorie und Praxis – gleichermaßen interessant. Ziel der Theorie ist es, Anwendungen wie die unten aufgeführten auf eine sichere Grundlage zu stellen.[2]
Leonhard Euler begründete 1750 die (analytische) Kreiseltheorie, indem er die heute nach ihm benannten Kreiselgleichungen aufstellte. Die Kreiselgleichungen sind das Pendant zu Newton’s zweitem Gesetz Kraft gleich Masse mal Beschleunigung für rotierende Starrkörper und vergleichbar fundamental für die Physik.
Die klassische Kreiseltheorie ist fast ausschließlich dem schweren Kreisel gewidmet, der sich, wie die Animation wiedergibt, mit seinem Beharrungsvermögen in eigentümlicher Weise dem Umfallen aufgrund seiner Schwere widersetzt.[3] Bis Anfang des 21. Jahrhunderts sind nur in wenigen Fällen analytisch darstellbare Bewegungen gefunden worden und die Frage nach der Lösbarkeit der Kreiselgleichungen in der großen Mehrheit der Kreiselbewegungen bleibt offen. Die moderne Kreiseltheorie widmet sich den allgemeinen Eigenschaften des dynamischen Systems.[4] Bei realen Kreiselphänomenen sind Reibeffekte wesentlich, mit denen sich beispielsweise das Aufrichten des Spielkreisels erklärt.
Anwendungen findet die Kreiseltheorie in der Eisenbahntechnik (Sinuslauf), der Drallstabilisierung von Schiffen (Schiffskreisel), Raumflugkörpern und Trägheitsnavigationssystemen sowie in der Astronomie und Ballistik.
Geschichte
Die wissenschaftliche Behandlung von Kreiseln begann mit J. A. Segner (1704 – 1777), der auch schon die Bedeutung der Reibung für das Aufrichten der Kreiselachse richtig erkannte.[5] Leonhard Euler entwickelte 1736 eine Theorie der Präzession[6] und 1750 die Kreiselgleichungen,[7] die er 1758 für den kräftefreien Euler-Kreisel lösen oder zumindest auf elliptische Integrale zurückführen konnte.[8] Von nun an war es möglich, Erkenntnisse aus Lösungen der Gleichungen abzuleiten, was sich allerdings als äußerst hartnäckiges „Kreiselproblem“ herausstellte.
Anders als bei Newton’s zweitem Gesetz, das spektakuläre Erfolge in der Himmelsmechanik feierte, gelang eine Lösung der Kreiselgleichungen nur beim Euler-Kreisel und erst 38 Jahre später (1788) beim schweren symmetrischen Kreisel mit Fixpunkt durch Joseph-Louis Lagrange.[9] Carl Gustav Jacob Jacobi veröffentlichte 1829 die Theorie der elliptischen und der Theta-Funktionen, mit denen sich die Kreiselgleichungen lösen lassen. Das hat Jacobi am Euler-Kreisel demonstriert und er empfahl 1849 mehrfach, das Problem mit diesen Funktionen anzugehen.[10] Zwischenzeitlich (1834) trug Louis Poinsot seine anschauliche geometrische Deutung der Kreiselbewegungen bei und veröffentlichte Siméon Denis Poisson seine kinematischen Gleichungen (1838).[11]
Trotz des vielversprechenden Ansatzes mit Theta-Funktionen und Preisausschreiben der preußischen und russischen Akademie der Wissenschaften in den 1850er Jahren erwies sich die „mathematische Nixe“, wie das Kreiselproblem in Deutschland mittlerweile aufgrund der Ästhetik des Gegenstands und der Grundgleichungen sowie seiner mathematischen Unnahbarkeit tituliert wurde, als äußerst unzugänglich.[12] Sofia Kowalewskaja entdeckte 1888 den letzten durch Theta-Funktionen lösbaren Fall, den schweren, symmetrischen, inhomogenen Kowalewskaja-Kreisel, womit die analytische Kreiseltheorie zu einem gewissen Abschluss kam.[13] So sind die Standardwerke von Klein und Sommerfeld (entstanden 1896–1910), Richard Grammel (1920, 1950) oder Kurt Magnus (1971) noch zu Beginn des 21. Jahrhunderts benutzbar. Ein Beleg dafür ist, dass ersteres Werk noch 100 Jahre nach seinem Erscheinen ins englische übersetzt wurde.[14]
A. M. Ljapunow bewies 1894, dass die drei Fälle von Euler, Lagrange und Kowalewskaja die einzigen sind, in denen die Lösung der Bewegungsgleichungen bei beliebigen Anfangsbedingungen eine eindeutige Funktion der Zeit ist, und É. Husson zeigte 1905,[15] dass diese Kreisel auch die einzigen durch algebraische #Integrale der Bewegung lösbaren Fälle sind.[16] Um 1900 haben Mathematiker einige integrierbare Spezialfälle gefunden,[17] aber die Frage nach der Lösbarkeit der großen Mehrheit der Kreiselbewegungen bleibt bis ins 21. Jahrhundert hinein offen.[18]
Wenngleich sich die klassische Kreiseltheorie überwiegend mit dem starren Körper mit Fixpunkt befasste, so wurden doch auch kreiselähnliche Erscheinungen an rotierenden Ketten, verformbaren Körpern – insbesondere der Erde – oder Flüssigkeiten untersucht. Durch die Raumfahrt kamen neue Problemstellungen hinzu,[19] wie beispielsweise
- die Selbsterregung (im körperfesten System aufgebrachte Momente) zwecks Stabilisierung und Lageregelung, siehe Stabilisierung (Raumfahrt),
- die Bewegungen von Körpern mit veränderlichen Massen,
- die Bewegungen starrer Körper mit Flüssigkeitsfüllung,
- die Drehbewegungen in einem zentralen Schwerefeld oder
- die Beeinflussung von Translations- und Rotationsbewegungen.
Ab Mitte des 20. Jahrhunderts entwickelten sich die Computerhard- und -software und mit ihnen die numerische Simulation soweit, dass mit ihrer Hilfe die Bewegungsgleichungen bei beliebigen Anfangsbedingungen und jeder gewünschten Genauigkeit berechnet werden können.[20] Die analytischen Lösungen verloren nun die früher berechtigte, zentrale Bedeutung und die Theorie wandte sich den nicht integrablen Fällen zu. Analytische und geometrische Methoden zu ihrer Untersuchung entstanden, die auch immer wieder durch den Kowalewskaja-Kreisel motiviert waren, der die Wissenschaft das gesamte 20. Jahrhundert hindurch beschäftigte. Die Untersuchungsmethoden der integrablen Fälle wurden zu Beginn des 21. Jahrhunderts auf die nicht integrablen dynamischen Systeme übertragen.[21]
Eigenschaften der Kreisel und ihrer Bewegungen
Die Kreiseltheorie versteht unter einem Kreisel einen beliebig gestalteten starren Körper, der Drehbewegungen ausführt. Dieses idealisierende Modell für wirkliche Kreisel ermöglicht deren Verhalten mit einfacheren mathematischen Hilfsmitteln zu erfassen.[22] Die klassische Kreiseltheorie konzentrierte sich auf den schweren Kreisel, der in einem Inertialsystem in einem seiner Punkte derart festgehalten wird, dass er sich um diesen Punkt noch irgendwie drehen kann.[23] Diese Forderung stellt nur eine kleine Einschränkung dar, denn jede Starrkörperbewegung lässt sich in Rotation und Translation zerlegen, und sofern letztere (näherungsweise) gleichförmig ist, spielt sie für die Kreiselbewegung keine Rolle. Durch die Fixierung in einem Punkt fallen die drei Verschiebungsfreiheitsgrade weg und verbleiben nur die drei Drehfreiheitsgrade des Kreisels, siehe #Bezugssysteme und Euler-Winkel.
Die Geschwindigkeit der Drehbewegung ist in der Kreiseltheorie unwesentlich. Der relativ langsam umlaufende „Erdkreisel“ unterliegt den Kreiselgesetzen genauso wie ein mit 60.000/min rotierender technischer Kreisel, allerdings vereinfachen sich die Gesetzmäßigkeiten bei diesen sogenannten schnellen Kreiseln außerordentlich.[24]
Die Bewegungen des kräftefreien Kreisels werden in der Kreiseltheorie Nutation genannt und die fremderregten Präzession.[25][26] Allerdings sind diese Bezeichnungen nicht einheitlich. Arnold[27] beispielsweise nennt die periodische Änderung der Neigung der Figurenachse gegenüber der Lotlinie beim Lagrange-Kreisel Nutation und die azimutale Drehung Präzession.
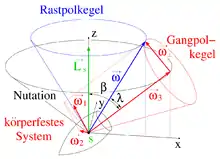
Die Drehachse eines Kreisels ist nicht körperfest, sie kann sich also relativ zum Kreisel bewegen und überstreicht dabei den körperfesten Gangpolkegel oder kurz Polkegel. Gleichzeitig bewegt sich die Drehachse auch im Raum und erzeugt dadurch eine Fläche, den Rastpol- oder Spurkegel. Die Leitkurve der Kegel ist der Endpunkt des Winkelgeschwindigkeitsvektors, der teils chaotisch schwankt, nur selten einen Zustand zweimal einnimmt und beliebig geformte Spurkegel und Polkegel erzeugt. Hat der Kreisel einen Fixpunkt, dann befinden sich die Spitzen der Kegel in diesem Fixpunkt, und die Bewegung des Kreisels kann als ein schlupfloses Abrollen des körperfesten Polkegels auf dem raumfesten Spurkegel gedeutet werden.[28] Bei der regulären Präzession wie beim symmetrischen Euler-Kreisel sind die Kegel Kreiskegel und die Bewegung durch die Kegel besonders anschaulich, siehe Abbildung zur Bewegungsform.
Der kräftefreie Kreisel befolgt mangels äußerer Einwirkungen den Energieerhaltungssatz. Solche Erhaltungsgrößen sind in der Kreiseltheorie von großem Interesse und werden #Integrale der Bewegung genannt. Dem Spielkreisel nahe verwandt ist der Lagrange-Kreisel, an dem paradoxe Kreiselerscheinungen auffallen:
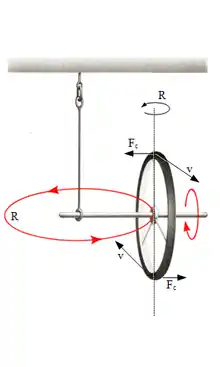
- die Präzession mit horizontaler Figurenachse, siehe Abbildung zum Speichenrad, und
- das Aufrichten des Kreisels entgegen der Schwerkraft, wie beim Stehaufkreisel.
Beim Kowalewskaja-Kreisel sind die Bewegungsfunktionen mathematisch anspruchsvoll und fast alle seine Bewegungen ändern ihr Stabilitätsverhalten, wenn sie schneller oder langsamer erfolgen. Der deutsche Mathematiker Wilhelm Hess entdeckte 1890 das loxodromische Pendel, dessen Schwerpunkt sich wie bei einem sphärischen Pendel unter kreiselspezifischer Schwerebeschleunigung bewegt, siehe Abbildung zum Hess’schen Pendel.
Jeder Kreisel kann permanente Staude-Drehungen um eine körperfeste lotrechte Achse ausführen. Ebenfalls sind pseudoreguläre Präzessionen möglich, wenn der Drehimpuls groß und nahe einer Symmetrieachse ausgerichtet ist. Die Bewegung gleicht der regulären Präzession, bei der der Kreisel wie in Abb. 1 um eine raumfeste und eine andere körperfeste Achse gleichmäßig rotiert und die beiden Achsen einen gleichbleibenden Winkel einschließen. Bei der pseudoregulären Präzession treten jedoch mit dem Auge kaum wahrnehmbare, kleine, überlagernde, zykloidenähnliche Oszillationen der Drehachse auf, die nach einem der Astronomie entlehnten Wort ebenfalls Nutationen genannt werden.[29][30] Eine Zusammenstellung einiger Fälle, in denen bis Anfang des 21. Jahrhunderts exakte Lösungen der Bewegungsgleichungen gelungen sind, finden sich bei den Euler-Poisson-Gleichungen.[31]
Die Energiefläche, auf der die Winkelgeschwindigkeit entlangfährt, kann bei allen Kreiseln analytisch beschrieben werden und es zeigt sich, dass die Fläche in instabilen relativen Gleichgewichten verzweigen kann, beispielsweise wenn der senkrecht stehende Kreisel instabil ist. In solchen Verzweigungspunkten ändert die Energiefläche ihre Eigenschaften (Topologie), was analytisch darstellbar und kreiseltheoretisch von Interesse ist.[32]
Drehimpuls und Drehträgheit
Der Schwung eines Massenpunkts, sein Beharrungsvermögen in der momentanen Bewegung, ist physikalisch durch seinen Impuls gegeben, der das Produkt aus der Masse und der Geschwindigkeit ist. Der Schwung von Kreiseln, ihr Beharrungsvermögen in der momentanen Drehung, ist entsprechend durch ihren Drehimpuls gegeben, der eine vektorielle Größe mit Richtung und Länge ist. Je größer der Drehimpuls ist, desto schwerer ist es, den Kreisel von seiner augenblicklichen Drehung abzubringen.
Der Drehimpuls eines mit dem Kreisel rotierenden Massenpunkts ist gegeben durch seinen Abstand von der Drehachse und seinen Impuls, der mit der Geschwindigkeit wächst, die im Kreisel mit dem Abstand zur Drehachse zunimmt. Somit ist der Drehimpuls eines Massenpunkts proportional zum Quadrat seines Abstands zur Drehachse. Das Produkt aus Masse und dem Quadrat des Abstands zur Drehachse ist das Trägheitsmoment des Massenpunkts und die Summation über alle Massenpunkte des Kreisels liefert dessen Trägheitsmoment um die jeweilige Achse.
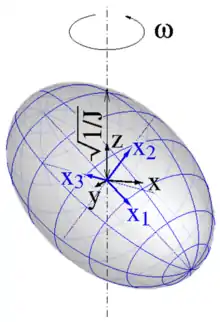
Die Drehträgheitseigenschaften bei Drehung um einen Bezugspunkt auf der Drehachse lassen sich für einen Kreisel anschaulich durch sein Trägheitsellipsoid darstellen, siehe Abbildung dazu. Der Abstand zwischen dem Bezugspunkt und dem Schnittpunkt der Drehachse mit dem Trägheitsellipsoid bestimmt das Trägheitsmoment J um die Achse. Die Halbachsen des Trägheitsellipsoids sind die Hauptachsen und ihre relativen Längen hängen mit den Hauptträgheitsmomenten des Kreisels zusammen, die den Kreisel kennzeichnende physikalische Größen sind.
Die Drehachse muss keineswegs fest sein, sondern kann sich im Raum und relativ zum Kreisel bewegen, wobei sich sein Trägheitsmoment mit der Achsrichtung ändern kann. Anders als bei Geschwindigkeit und Impuls ist der Zusammenhang zwischen Drehgeschwindigkeit und Drehimpuls zeitabhängig und außerdem müssen beide Größen auch nicht parallel sein.
Eine charakteristische Abmessung des Kreisels kann dazu verwendet werden, die Längen zu skalieren, und ein Hauptträgheitsmoment dazu, die Zeit oder Energie zu skalieren,[32] weswegen zwei Kreisel mit zueinander ähnlichen Ellipsoiden und vergleichbarer Lage des Massenmittelpunkts und des Bezugspunkts bei gleichen Anfangsbedingungen in ähnlicher Weise umlaufen.
Drallsatz
Die Dynamik des Kreisels lässt sich mit dem Drehimpuls ähnlich der Dynamik des Massenpunkts formulieren:[33]
- Trägheitsprinzip
- Der kräftefreie Kreisel bewegt sich so, dass sein Drehimpuls nach Betrag und Richtung konstant bleibt (so wie sich ein kräftefreier Massenpunkt gleichförmig bewegt).
- Drallsatz (Aktionsprinzip)
- Unter dem Einfluss von Drehmomenten bewegt sich der Kreisel derart, dass die Änderungsgeschwindigkeit des Drehimpulsvektors nach Richtung und Betrag gleich dem angreifenden Moment ist (so wie die Beschleunigung des Massenpunkts in Richtung einer angreifenden Kraft erfolgt).
Die Analogien zwischen Rotation und Translationsbewegung hören jedoch dort auf, wo die typischen Kreiselbewegungen beginnen. Denn während Impuls und Geschwindigkeit bei der Translation immer parallel und proportional zueinander sind, trifft das auf Drehimpuls und Drehgeschwindigkeit in den kreiseltheoretisch interessanten Fällen nicht zu. Wird ein anfangs ruhender Kreisel durch einen Drehstoß um eine Achse in Drehung versetzt, muss er anschließend keineswegs um diese Achse kreisen.[34] Bei konstantem Drehimpuls muss die Winkelgeschwindigkeit mitnichten konstant sein und umgekehrt, was der Dschanibekow-Effekt und der Euler-Kreisel untermauern.[35] Im Allgemeinen gilt:
- Bei konstantem Drehimpuls ändert sich bei freier Bewegung fortlaufend die Drehachse und der Kreisel taumelt oder „eiert“.
- Wird die Drehachse festgehalten, dann ändert sich fortlaufend der Drehimpuls, wofür die Halterungen der Drehachse die dazu notwendigen Momente einbringen und die #Kreiselwirkungen abtragen müssen.
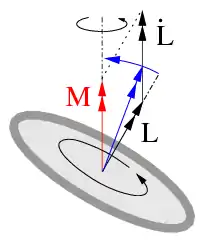
Der Drallsatz ist das wichtigste physikalische Gesetz in der Kreiseltheorie und schlägt sich anschaulich in der Regel vom gleichsinnigen Parallelismus[36] nieder, siehe Abbildung dazu: Greift am Kreisel ein Drehmoment M an, dann versucht der Kreisel seine Drehbewegung, ausgedrückt durch den Drehimpuls L, dem Drehsinn des Moments gleichsinnig parallel auszurichten, was im Bild blau angedeutet ist.
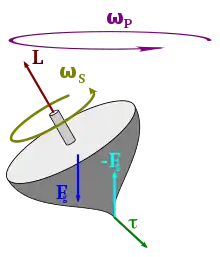
Mit diesem Grundsatz erklären sich viele Eigenschaften der Kreiselbewegungen. Wirkt beispielsweise eine Kraft auf einen Kreisel mit Fixpunkt, dann entsteht im Fixpunkt eine Gegenkraft und mit ihr ein Kräftepaar, das ein zur Ebene des Kräftepaars senkrechtes Moment ausübt, siehe Abbildung dazu. In dessen Richtung – immer senkrecht zur Kraft – weicht der Kreisel aus. Das gilt jedoch nur für den Drehimpuls und nur beim schnellen Kreisel auch für die Drehachse oder ggf. die Hauptachse, um die der Kreisel dreht.[37] Auch die Präzession mit horizontaler Drehachse wie in der Abbildung zum Speichenrad lässt sich mit der Regel angewendet auf die Kreiselwirkung des axialen Drehimpulses anschaulich erklären.
Kreiselwirkung
Das auffälligste Merkmal von Kreiseln ist die des gyroskopischen Effekts oder der Kreiselwirkung, die sich als verblüffende Kraftäußerung bemerkbar macht, wenn man versucht, die Drehachse eines Kreisels in eine neue Lage zu bringen. Die Kreiselwirkung äußert sich dabei als Widerstand, der über das beim ruhenden Körper bekannte Maß weit hinausgehen kann.[38]
Die Kreiselwirkung versucht nach der Regel des gleichsinnigen Parallelismus die Achse der Eigendrehung in Richtung und Orientierung mit der Achse der erzwungenen Drehung zur Deckung zu bringen.[39] Sie ist eine d’Alembertsche Trägheitskraft und als solche ein einem angreifenden Moment entgegengesetzt gleichgroßes Moment: Moment und Kreiselwirkung gleichen sich aus (befinden sich im dynamischen Gleichgewicht.)
Die Kreiselwirkung ist gleich der Summe der im Körper durch die Euler- und Zentrifugalkräfte ausgeübten Momente. Die Euler-Kräfte sind Ausdruck des Beharrungsvermögens gegen Winkelbeschleunigungen, und die Zentrifugalkräfte entstehen aus der Trägheit der Massenpunkte gegen Richtungsänderungen ihrer Bewegung. In den Richtungen senkrecht zu einem angreifenden Moment neutralisieren sich die Kreiselwirkungen der Euler- und Zentrifugalkräfte und befinden sich dort untereinander im dynamischen Gleichgewicht. Die Euler-Kräfte sind Ausdruck von Winkelbeschleunigungen, die dort von den Zentrifugalkräften im Kreisel hervorgerufen werden. Umgekehrt führen die Winkelbeschleunigungen zur Änderung der Drehachse und Drehgeschwindigkeit, was die Zentrifugalkräfte beeinflusst. Folge dieses dynamischen Wechselspiels ist besagtes Taumeln und „Eiern“ des kräftefreien Kreisels.
Die Kreiselwirkungen werden bei Kurvenkreiseln, Kollermühlen und der Drallstabilisierung technisch ausgenutzt.
Drallstabilisierung
Eine der technisch wertvollsten Eigenschaften von Kreiseln ist die Möglichkeit, mit ihnen Körper in ihrer räumlichen Ausrichtung zu stabilisieren. Dies wird, wie schon eingangs erwähnt, bei Schiffen, Raumflugkörpern und Geschossen ausgenutzt.
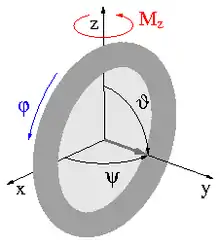
Die Drallstabilisierung zeigt sich beim einfachen Schwungrad in Abb. 8, wobei die Figurenachse (anfänglich in y-Richtung) frei ist, so dass sie ihre Richtung beliebig ändern kann. Auf dieses ansonsten kräftefreie Schwungrad wirke eine kurze Zeit in z-Richtung ein konstantes Moment Mz, das das Schwungrad in Drehung um z versetzt. Diese Drehung macht sich am ruhenden und rotierenden Schwungrad jedoch unterschiedlich bemerkbar:
- Ruht das Schwungrad, dann beginnt es durch das Moment um z zu rotieren. Nachdem das Moment aufgehört hat zu wirken, verharrt das Schwungrad in der Drehung um z, der Drehwinkel ψ der Figurenachse um z nimmt monoton zu und ist unbeschränkt. Die Winkelgeschwindigkeit und der Drehimpuls haben nur eine Komponente und die weist in z-Richtung. Der Neigungswinkel ϑ zwischen Figurenachse und Momentenachse z bleibt unverändert.
- Rotiert das Schwungrad anfänglich hinreichend schnell um die Figurenachse, dann zeigt sich ein anderes Bild. Zwar führt das Moment auch hier zu einer linearen Zunahme des Drehimpulses in z-Richtung, aber weil sich diese Komponente zum anfänglichen (als viel größer angenommenen) Drehimpuls in y-Richtung vektoriell addiert, der Drehimpuls also weiter vor allem in y-Richtung orientiert ist, und Drehimpuls und Winkelgeschwindigkeit einen spitzen Winkel einschließen (siehe Energieellipsoid), dreht das Schwungrad weiter vor allem um die y-Achse. Dadurch bleibt der Drehwinkel ψ der Figurenachse um z beschränkt. Nach der Regel vom gleichsinnigen Parallelismus versucht der Kreisel seine Drehung dem angreifenden Moment anzugleichen, wodurch der Winkel ϑ abnimmt.
Ursache für den geringen Einfluss des Moments auf die Drehung des rotierenden Schwungrads um z sind Trägheitskräfte, die Kreiselwirkungen aufbauen. Wird die Drehachse durch Lager irgendwie gehalten, neutralisieren sie diese Kreiselwirkungen und können die Trägheitskräfte nicht ihr Potenzial entfalten. Drallstabilisierung tritt nur bei Kreiseln auf, die ihre volle Bewegungsfreiheit in drei Drehfreiheitsgraden besitzen.[40] Aber selbst dann gelingt eine Drallstabilisierung nicht immer, wie William Thomson, 1. Baron Kelvin und Peter Guthrie Tait zeigen konnten.[41]
Integrale der Bewegung
In der Kreiseltheorie werden bei der Rotation eines Kreisels unveränderliche physikalische Größen Integrale, manchmal auch erste Integrale genannt, englisch first integrals.[18] Diese sind von hervorragender Bedeutung, weil sie die Lösung der Kreiselgleichungen ermöglichen oder zumindest, wie das Jellett-Integral beim Spielkreisel, die Bewegungen kennzeichnen.
Beim kräftefreien Euler-Kreisel ist der Drehimpuls konstant und seine raumfesten Komponenten sowie sein Betrag sind bei dem Kreisel Integrale. Wenn das Schwerefeld konservativ ist, so wie das der Erde, befolgt die Kreiselbewegung den Energieerhaltungssatz, weshalb die Gesamtenergie dann ein Integral ist. Beim schweren Kreisel hat das Moment der lotrechten Schwerkraft keine Komponente in Lotrichtung und somit ist der Drehimpuls in dieser Richtung ein Integral. Jedoch besitzen die Integrale, wie beispielsweise die Kowalewskaja-Konstante, nicht immer eine anschauliche Bedeutung.
Beim schweren Kreisel existieren immer drei erste Integrale (der Euler-Poisson-Gleichungen) bei sechs Unbekannten. Wenn noch ein viertes Integral gefunden wird, dann kann mit der von Carl Gustav Jacob Jacobi ersonnenen Methode des letzten Multiplikators[42] noch ein fünftes Integral konstruiert werden, womit die Bewegungsgleichungen gelöst sind. Denn eine der sechs Unbekannten übernimmt die Rolle der unabhängigen Variable, da die Zeit in den Gleichungen nicht explizit vorkommt.[43]
Bezugssysteme und Euler-Winkel
In der Kreiseltheorie werden vor allem zwei Bezugssysteme verwendet:
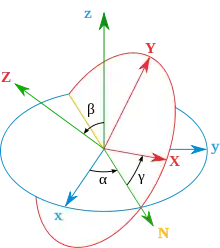
Im Inertialsystem (blau in Abb. 9), in dem der Bezugspunkt ruht und der Kreisel rotiert, werden die Euler-Winkel definiert, die die Orientierung der Hauptachsen des Kreisels im Raum angeben. Der zeitliche Verlauf der Winkel bestimmt die Bewegungsfunktion des Kreisels. Im raumfesten System können die Massenträgheitsmomente um nicht festgehaltene Achsen zeitlich variabel sein.
Im mitrotierenden körperfesten Bezugssystem (rot) sind die Bewegungsgleichungen besonders leicht zu formulieren, weil dort die Trägheitsmomente zeitlich konstant sind. In den Bewegungsgleichungen müssen hier auftretende Trägheitskräfte berücksichtigt werden. Diese sind die Euler-Kraft und die Fliehkraft. Corioliskräfte kommen hier nicht vor, weil beim Starrkörper eine Bewegung seiner Massenpunkte relativ zum Körper ausgeschlossen ist.
In der Kreiseltheorie werden die Basisvektoren im raumfesten Bezugssystem mit den Euler’schen Winkeln in der Standard-x-Konvention (z, x′, z″) ausgedrückt. Der Winkel ψ ist der Präzessionswinkel, ϑ der Neigungswinkel und φ bestimmt die Eigendrehung des Kreisels.[44] Bezeichnen die Einheitsvektoren êx,y,z die raumfeste Standardbasis (blau in Abb. 9) und êX,Y,Z = ê1,2,3 die mit dem Körper rotierende, bewegte Basis (rot), dann lauten die mitbewegten Basiseinheitsvektoren bezüglich der raumfesten Basis:

Der Vektor

markiert die Knotenachse (gelbes N im Bild). Die Winkelgeschwindigkeit ihre Komponenten und die Vektoren hängen über


zusammen. Häufig werden die Komponenten ω1,2,3 im Hauptachsensystem auch mit p, q und r bezeichnet und gelegentlich tauschen die Winkel ψ und φ die Bedeutung.
Bei sinϑ = 0 tritt eine Singularität auf, weil dann, wegen cosϑ = ±1, die Winkel ψ und φ in den Basisvektoren nach den Additionstheoremen nur als Kombination ψ ± φ vorkommen und somit verschiedene Winkel zur selben Basis führen können.
Literatur
- R. Grammel: Der Kreisel. Seine Theorie und seine Anwendungen. Vieweg Verlag, Braunschweig 1920, DNB 573533210 (archive.org – „Schwung“ bedeutet Drehimpuls, „Drehstoß“ etwa Drehmoment und „Drehwucht“ Rotationsenergie, siehe S. VII).
oder
R. Grammel: Der Kreisel. Seine Theorie und seine Anwendungen. Erster Band: Die Theorie des Kreisels. Springer Verlag, Berlin u. a. 1950, ISBN 978-3-662-24311-4, doi:10.1007/978-3-662-26425-6 (eingeschränkte Vorschau in der Google-Buchsuche). - K. Magnus: Kreisel: Theorie und Anwendungen. Springer, 1971, ISBN 978-3-642-52163-8, S. v (eingeschränkte Vorschau in der Google-Buchsuche).
- Wilderich Tuschmann, Peter Hawig: Sofia Kowalewskaja. Ein Leben für Mathematik und Emanzipation. Birkhäuser Verlag, Basel 1993, ISBN 978-3-0348-5721-5, doi:10.1007/978-3-0348-5720-8 (eingeschränkte Vorschau in der Google-Buchsuche).
- F. Klein, A. Sommerfeld: Über die Theorie des Kreisels. Heft I-III. Teubner, Leipzig 1897 (archive.org).
Sowie
F. Klein, A. Sommerfeld: Über die Theorie des Kreisels. Heft IV. Teubner, Leipzig 1910 (archive.org). - Friedhelm Kuypers: Klassische Mechanik. Wiley-VCH, Weinheim 2016, ISBN 978-3-527-33960-0 (eingeschränkte Vorschau in der Google-Buchsuche).
- Eugene Leimanis: The General Problem of the Motion of Coupled Rigid Bodies about a Fixed Point. Springer Verlag, Berlin / Heidelberg 1965, ISBN 978-3-642-88414-6, S. 10 f., doi:10.1007/978-3-642-88412-2 (englisch, eingeschränkte Vorschau in der Google-Buchsuche).
- I. G. Gashenenko, P. H. Richter: Enveloping Surfaces And Admissible Velocities Of Heavy Rigid Bodies. In: World Scientific Publishing Company (Hrsg.): International Journal of Bifurcation and Chaos. Band 14, Nr. 8, 2004, ISSN 0218-1274, S. 2525–2553, doi:10.1142/S021812740401103X (iamm.su [PDF; abgerufen am 2. Juni 2019] siehe S. 2537).
- E. F. Autenrieth, Max Ensslin: Technische Mechanik: Ein Lehrbuch der Statik und Dynamik für Ingenieure. Springer-Verlag, Berlin 1922, ISBN 978-3-642-98876-9 (eingeschränkte Vorschau in der Google-Buchsuche).
- Michèle Audin: Erinnerungen an Sofja Kowalewskaja. Springer Verlag, London u. a. 2008, ISBN 978-0-85729-928-4, S. 106, doi:10.1007/978-0-85729-929-1 (englisch, eingeschränkte Vorschau in der Google-Buchsuche – Originaltitel: Remembering Sofya Kovalevskaya.).
Weblinks
- TIB AV-Portal der Technische Informationsbibliothek, qualitätsgeprüfte wissenschaftliche Videos zum Thema Kreisel.
- Physik I -Vorlesung 11: Kreisel und Präzession Hochschule Bochum, Professor Eckehard Müller auf youtube, eingestellt am 11. Januar 2016
Einzelnachweise
- Grammel (1920), S. 2, Grammel (1950), S. 3.
- Grammel (1920), S. V, Grammel (1950), S. III, Magnus (1971), S. 1.
- Grammel (1920), S. 3.
- Gashenenko und Richter (2003), S. 2527, 2532.
- Felix Klein, Conr. Müller: Encyklopädie der Mathematischen Wissenschaften mit Einschluss ihrer Anwendungen. Mechanik. Hrsg.: Akademien der Wissenschaften zu Göttingen, Leipzig, München und Wien. Vierter Band, 1. Teilband. B. G. Teubner, 1908, ISBN 978-3-663-16021-2, S. 546, doi:10.1007/978-3-663-16021-2 (eingeschränkte Vorschau in der Google-Buchsuche – siehe auch wikisource}).
- Ludwig Darmstaedter (Hrsg.): Handbuch zur Geschichte der Naturwissenschaften und Technik. Springer-Verlag, Berlin / Heidelberg 1908, S. 209 (Wikimedia Commons).
- Clifford Truesdell: Die Entwicklung des Drallsatzes. In: Gesellschaft für Angewandte Mathematik und Mechanik (Hrsg.): Zeitschrift für Angewandte Mathematik und Mechanik (= Heft 4/5). Band 44, April 1964, S. 154, doi:10.1002/zamm.19640440402 (wiley.com).
- Leonhard Euler: Über die Bewegung der Rotation von starren Körpern um eine variable Achse. In: Königlich Preußische Akademie der Wissenschaften zu Berlin (Hrsg.): Mémoires de l’Académie des Sciences de Berlin. Band 14. Petersburg 1758, S. 173 und 190. (französisch, archive.org – Originaltitel: Du mouvement de rotation des corps solides autour d’un axe variable.).
- Joseph-Louis Lagrange: Mécanique Analytique. Tome Second. Corucier, Paris 1815, S. 265 f. (französisch, archive.org [abgerufen am 20. August 2017]). oder Joseph-Louis Lagrange: Analytische Mechanik. Vandenhoeck und Ruprecht, Göttingen 1797 (archive.org – Deutsche Übersetzung von Friedrich Murhard).
- Tuschmann und Hawig (1993), S. 123.
- Siméon Denis Poisson: Traité de Méchanique. 3. Auflage. 1 bis 6. J. G. Garnier, Brüssel 1838 (französisch, archive.org).
- Tuschmann und Hawig (1993), S. 123., Audin (2008), S. 91.
- Tuschmann und Hawig (1993), S. 119.
- siehe Literatur und F. Klein, A. Sommerfeld: The Theory of the Top. Volume I: Introduction to the Kinematics and Kinetics of the Top. Birkhäuser, Basel / Boston 2008, ISBN 978-0-8176-4720-9, S. vii ff., doi:10.1007/978-0-8176-4721-6 (englisch, springer.com – Originaltitel: Über die Theorie des Kreisels. Übersetzt von R. J. Nagem, G. Sandri, Das Vorwort des Übersetzers mit historischem Abriss gibt es bei springer.com (PDF)).
- Édouard Husson: Forschung nach algebraischen Integralen in der Bewegung eines schweren Körpers um einen festen Punkt. In: Annales de la faculté des sciences de Toulouse 2e série. 1906, S. 73–152, doi:10.5802/afst.232 (französisch, numdam.org [PDF; abgerufen am 7. März 2018] Originaltitel: Recherche des intégrales algébriques dans le mouvement d’un solide pesant autour d’un point fixe. auf Seite 74 wird ein erster Beweisversuch von Roger Liouville 1897 als fehlerhaft aufgedeckt)., siehe auch Audin (2008), S. 106.
- Leimanis (1965), S. 53 ff.
- Magnus (1971), S. 129.
- Gashenenko und Richter (2003), S. 2525.
- K. Magnus: Kreiselprobleme/ Gyrodynamics. Symposion Celerina, 20. Bis 23. August 1962 / Symposion Celerina, August 20–23, 1962. Hrsg.: Hans Ziegler. Springer Verlag, Berlin u. a. 1963, ISBN 978-3-662-12200-6, S. 7, doi:10.1007/978-3-662-12200-6 (eingeschränkte Vorschau in der Google-Buchsuche).
- Magnus (1971), S. 109.
- Gashenenko und Richter (2003), S. 2532 f.
- Magnus (1971), S. 1.
- Grammel (1920), S. 3, Grammel (1950), S. 2, Tuschmann und Hawig (1993), S. 121.
- Magnus (1971), S. 2f.
- Magnus (1971), S. 119
- Duden│Präzession. Duden online, abgerufen am 5. November 2017. sowie Duden│Nutation. Duden online, abgerufen am 8. März 2018.
- Vladimir I. Arnol’d: Mathematische Methoden der klassischen Mechanik. Springer-Verlag, Basel 1988, ISBN 978-3-0348-6670-5, S. 159, doi:10.1007/978-3-0348-6669-9 (eingeschränkte Vorschau in der Google-Buchsuche – russisch: Математическе методы классическоя механики. Moskau 1979. Übersetzt von Prof. Dr. Peter Möbius, TU Dresden).
- Magnus (1971), S. 27.
- Kuypers (2016), S. 215
- E. F. Autenrieth, Max Ensslin: Technische Mechanik: Ein Lehrbuch der Statik und Dynamik für Ingenieure. Springer-Verlag, Berlin 1922, ISBN 978-3-642-98876-9 (eingeschränkte Vorschau in der Google-Buchsuche [abgerufen am 5. November 2017]).
- Magnus (1971), S. 108.
- Gashenenko und Richter (2003), S. 2526 f.
- Klein und Sommerfeld (1910), S. 762.
- Magnus (1971), S. 2 und S. 47, Grammel (1920), S. 43.
- Grammel (1920), S. 18.
- Klein und Sommerfeld (1910), S. 764.
- Grammel (1920), S. 59+62.
- Grammel (1920), S. 3
- Grammel (1920), S. 70.
- Klein und Sommerfeld (1910), S. 767 f.
- Grammel (1950), S. 261 f.
- Carl Gustav Jacob Jacobi: Vorlesungen über Dynamik. Hrsg.: A. Clebsch. Verlag G. Reimer, Berlin 1884, S. 73 ff. (Textarchiv – Internet Archive).
- Leimanis (1965), S. 10.
- Grammel (1920), S. 51.