Dynamisches Gleichgewicht (Technische Mechanik)
Als Dynamisches Gleichgewicht wird in der Technischen Mechanik das Gleichgewicht zwischen äußerer Kraft und Trägheitskraft bezeichnet.[1]
Für einen Körper mit der Masse lautet das zweite Newtonsche Gesetz:

- .

Dabei ist die äußere Kraft und die Beschleunigung im Inertialsystem. Nachdem die Grundgleichung der Mechanik auf die Form



gebracht wurde,[2] fasst man das negative Produkt aus Masse und Beschleunigung formal als Kraft auf, die als Trägheitskraft oder genauer als D'Alembertsche Trägheitskraft bezeichnet wird.[3] Man erhält:


Damit ist das dynamische Problem auf ein statisches Problem des Kräftegleichgewichts zurückgeführt. Die Summe von äußerer Kraft und Trägheitskraft ist somit stets Null. Die d'Alembertsche Trägheitskraft ist die Folge der Beschleunigung und nicht deren Ursache.[4]
Der Vorteil dieser Vorgehensweise liegt darin, dass die Beschreibung einheitlich in einem Inertialsystem erfolgt und nicht weitere Bezugssysteme eingeführt werden müssen. Für viele Anwendungen in der Technischen Mechanik ist bereits ein erdfestes Bezugssystem mit ausreichender Genauigkeit ein Inertialsystem, in der Fahrzeugdynamik nach DIN ISO 8855 so festgelegt.
Anwendung
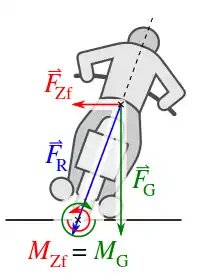
In der Praxis kann man den Umstand ausnutzen, dass Trägheitskraft und äußere Kraft häufig an verschiedenen Punkten angreifen. Beispiel ist die Berechnung der Schräglage eines Motorrads bei stationärer Kurvenfahrt. Als äußere Kräfte wirken die Gewichtskraft im Schwerpunkt und die Reifenkräfte im Radaufstandspunkt auf das Motorrad. Die Reifenkräfte sind die Seitenkraft radial zum Kurvenmittelpunkt sowie die Radlast vertikal (beide nicht eingezeichnet).
Der Betrag von Zentripetalkraft bzw. Zentrifugalkraft berechnet sich aus der Bahngeschwindigkeit und dem Krümmungsradius der Bahn :



Wählt man als Bezugspunkt für das Momentengleichgewicht den Radaufstandspunkt, muss die resultierende Kraft aus Fliehkraft und Gewichtskraft durch den Radaufstandspunkt gehen, wenn das Motorrad nicht umkippen soll. Die Reifenkräfte, die die Zentripetalkraft ausüben, brauchen beim Momentengleichgewicht nicht berücksichtigt zu werden, da sie bezüglich des Bezugspunkts (Radaufstandspunkt) keinen Hebelarm besitzen und dadurch kein Moment erzeugen. Für die Schräglage ergibt sich





mit der Erdbeschleunigung , und der Radialbeschleunigung .


Einzelnachweise
- Alfred Böge, Wolfgang Böge, Klaus-Dieter Arnd u. a.: Handbuch Maschinenbau: Grundlagen und Anwendungen der Maschinenbau-Technik Gebundene Ausgabe – 22. Auflage. Springer Verlag, 2014, ISBN 978-3-658-06597-3 (eingeschränkte Vorschau in der Google-Buchsuche).
- Dietmar Gross, Werner Hauger, Jarg Schrader, Wolfgang A. Wall: Technische Mechanik. 10. Auflage. Band 3 Kinetik. Gabler Wissenschaftsverlage, 2008, S. 191 (eingeschränkte Vorschau in der Google-Buchsuche): „Wir schreiben nun und fassen das negative Produkt aus der Masse und der Beschleunigung formal als eine Kraft auf, die wir […] D'Alembertsche Trägheitskraft nennen: . Diese Kraft ist keine Kraft im Newtonschen Sinne, da zu ihr keine Gegenkraft existiert (sie verletzt das Axiom actio=reactio!); wir bezeichnen sie daher als Scheinkraft.“
- Gerhard Knappstein: Kinematik und Kinetik. Harri Deutsch Verlag, 2004, ISBN 3-8171-1738-8, S. 68 ff. (eingeschränkte Vorschau in der Google-Buchsuche).
- Cornelius Lanczos: The Variational Principles of Mechanics. Courier Dover Publications, New York 1986, ISBN 0-486-65067-7, S. 88–110. (eingeschränkte Vorschau in der Google-Buchsuche): „We now define a vector I by the equation I = -m A. This vector I can be considered as a force created by the motion. We call it the "force of inertia". With this concept the eqation of Newton can be formulated as follows: F + I = 0.“



