Freiheitsgrad
Freiheitsgrad bezeichnet im engen, mechanischen Sinn jede voneinander unabhängige (und in diesem Sinne „frei wählbare“) Bewegungsmöglichkeit,[1] im weiteren Sinne jeden unabhängigen veränderlichen inneren oder äußeren Parameter eines Systems.[2] Das System muss dabei folgende Eigenschaften haben:
- Es ist durch die Spezifizierung der Parameter eindeutig bestimmt.
- Wird ein Parameter weggelassen, so ist das System nicht mehr eindeutig bestimmt.
- Jeder Parameter kann verändert werden, ohne dass sich die anderen Parameter verändern.
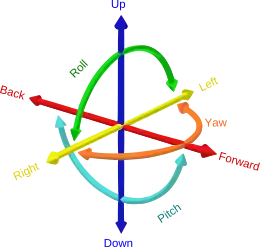
Bei kinematischen Ketten wird die Zahl der Freiheitsgrade auch Laufgrad genannt.[3] Ein starrer Körper im Raum hat demnach sechs Freiheitsgrade, denn man kann den Körper in drei voneinander unabhängige Richtungen bewegen (Translation) und um drei voneinander unabhängige Achsen drehen (Rotation).
Mechanik



Jeder Freiheitsgrad eines physikalischen Systems entspricht einer unabhängigen verallgemeinerten Koordinate, mit der das System beschrieben werden kann.[4]
Was mit dem Wort „unabhängig“ gemeint ist, sieht man an einem Beispiel: Angenommen, ein Teilchen befindet sich in einer Ebene (z. B. auf einem Tisch) mit einem Koordinatensystem und kann sich in dieser Ebene nur entlang einer „schrägen“ Geraden bewegen. Die Position des Teilchens kann dann durch eine einzige Zahl beschrieben werden. Es gibt dafür zwar verschiedene Möglichkeiten, z. B.
- die x-Koordinate des Teilchens (über die Geradengleichung lässt sich daraus dann auch die y-Koordinate eindeutig berechnen),
- die y-Koordinate (daraus lässt sich umgekehrt die x-Koordinate berechnen),
- die Winkel-Koordinate in einem polaren Koordinatensystem
- oder den Abstand von einem vorgegebenen festen Punkt auf der Geraden.
In jedem dieser Fälle reicht jedoch stets die Angabe eines einzelnen Werts zur Festlegung der Position. Das Teilchen besitzt daher also nur einen Freiheitsgrad.
Die Zahl der verallgemeinerten Koordinaten ist eine Systemeigenschaft. Beispielsweise hat ein freier Massenpunkt im Raum drei Translationsfreiheitsgrade, die seine Position festlegen. Da ein Punkt keine Ausdehnung hat, hat er jedoch keine Orientierung. Ein starrer Körper besitzt demgegenüber zusätzlich noch drei Rotationsfreiheitsgrade, jeweils beschreibbar durch Drehwinkel. Dies gilt für die Freiheitsgrade im Großen – siehe auch Grüblersche Gleichung bzw. Abschnitt Technische Mechanik und Grüblersche Gleichung.
Holonome und nicht-holonome Systeme
Den Freiheitsgraden im Großen, beispielsweise nach Grübler, stehen die Freiheitsgrade im Kleinen, das heißt bei infinitesimaler Betrachtung eines mechanischen Systems, gegenüber. Dabei gilt, dass die Freiheitsgrade im Kleinen jeweils echt kleiner oder gleich derer im Großen sind. Nicht-holonome Systeme sind solche, bei deren nicht-holonome (anholonome) Zwangsbedingungen vorhanden sind, weshalb die infinitesimale Bewegungsfreiheit der Systeme eingeschränkt ist: Als gutes Beispiel für ein solches System dient ein Vierrad-Fahrzeug in der Ebene.
Technische Mechanik und Grüblersche Gleichung
.jpg.webp)
Gemäß der Grüblerschen Gleichung ist die Zahl der Freiheiten eines Systems, das aus vielen Teilsystemen gebildet wird, gleich der Summe der Freiheiten der Teilsysteme, sofern diese nicht durch Zwangsbedingungen eingeschränkt wird. Beispielsweise hat ein Auto in der Ebene drei Freiheitsgrade (Positionswechsel entlang von x- und y-Koordinate sowie Fahrtrichtung). Ein einachsiger Anhänger hat vier Freiheitsgrade, da er zusätzlich noch nach vorn und hinten kippen kann. Wird der Anhänger an das Auto angehängt, hat das Gesamtsystem dennoch nur insgesamt vier Freiheitsgrade (Positionswechsel entlang von x- und y-Koordinate, Drehung des Zugfahrzeugs sowie Änderung des Winkels, in dem der Anhänger zum Zugfahrzeug steht), da das Kippen sowie die unabhängige Bewegung des Anhängers durch die Anhängerkupplung unterbunden wird. Siehe auch Laufgrad.
Grundsätzlich lassen sich folgende Fälle unterscheiden:
- Für kann sich das System bewegen (Mechanismus)
- Für ist das System in sich beweglich, d. h. die Bewegungen mehrerer Elemente müssen vorgegeben werden (z. B. mehrere Antriebe), damit die Bewegungen aller Elemente definiert sind.
- Für liegt „Zwanglauf“ vor. Gibt man die Bewegung eines Elementes vor (z. B. ein Antrieb), sind auch die Bewegungen aller restlichen Elemente definiert. Beispiele: Ein Punkt bewegt sich entlang einer Linie. In einem (idealisierten) Zahnradgetriebe bewirkt die Drehung eines Zahnrads stets eine genau definierte Bewegung aller anderen Zahnräder.
- Bei können sich z. B. zwei Punkte eines Systems unabhängig voneinander jeweils entlang einer Linie bewegen, ein einzelner Punkt kann sich in einer Ebene bewegen, oder in einem Getriebe ist neben der Drehbewegung eine weitere Bewegung möglich, etwa wenn es sich in einen zweiten Gang schalten lässt.
- Für kann sich das System nicht bewegen
- Für liegt ein statisch bestimmtes System vor, das nur genau eine Position einnehmen kann.
- Für liegt ein statisch überbestimmtes System vor, in dem starke innere Spannungen auftreten können (es „klemmt“). Dies kann durch Zusatzbedingungen ggf. behoben werden.







Beispiel: Doppelpendel
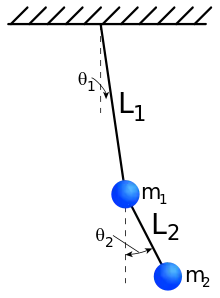
Zwei freie Punktmassen und haben im dreidimensionalen Raum jeweils drei Translationsfreiheitsgrade, insgesamt also sechs. Ein Doppelpendel, das über Drehgelenke (im Gegensatz zu Kugelgelenken) verbunden ist, kann jedoch nur in einer Ebene schwingen, so dass seine Beweglichkeit durch folgende Zwangsbedingungen eingeschränkt ist (s. Abb.):

- befindet sich in der -Ebene (), ebenso ().
- Die Stäbe der beiden Pendel sind starr ( und ). Jede Punktmasse kann sich daher nur auf einem Kreisbogen rund um den Kreismittelpunkt bewegen.





Diese vier Zwangsbedingungen reduzieren die Zahl der Freiheitsgrade auf . Für die Beschreibung des Systems genügen daher die beiden Winkel und als unabhängige verallgemeinerte Koordinaten.

Beispiel: Gelenke
Im Gelenk eines Mechanismus sind zwei Teile miteinander beweglich verbunden. Der Freiheitsgrad ist die Anzahl der möglichen Bewegungen, die das Gelenk ausführen kann. Dafür stehen prinzipiell die sechs Freiheitsgrade des starren Körpers zur Verfügung. Mindestens einer davon wird im Gelenk unterbunden, daher stehen maximal fünf für eine technische Anwendung zur Verfügung. Mehr als drei Freiheitsgrade werden mit Mehrfachgelenken erreicht. Mehrfachgelenke können als Kombination mehrerer einfacher Gelenke angesehen werden.

Gelenke haben immer einen Freiheitsgrad größer Null. Andernfalls handelt es sich nicht um ein Gelenk, sondern um eine Einspannung.
| Gelenktyp | Freiheitsgrad | Abb. |
|---|---|---|
| Drehgelenk | → Drehung | Fig. 2. |
| Schraubgelenk | → Drehung | Fig. 3. |
| Drehschub-, Plattengelenk | → Längs-, Querbewegung (über eine kurze Strecke), Rotation | Fig. 5. |
| Drehschubgelenk | → Längsbewegung, Drehung | Fig. 6. |
| Kugelgelenk | → Bewegung in einer Ebene (Kugelfläche), Drehung | Fig. 7. |
 | ||

Thermodynamik und statistische Mechanik
Freiheitsgrade eines Massepunkts
Ein Massepunkt kann (bezogen auf seinen Schwerpunkt) weder rotieren noch schwingen, sondern nur in den drei Raumrichtungen bewegen. Er hat
Freiheitsgrade. Die Atome einatomiger Gase wie die Edelgase zeigen ein dementsprechendes thermodynamisches Verhalten, solange ihre thermische Energie unterhalb der Anregungsschwelle innerer angeregter Zustände bleibt.
Freiheitsgrade der Moleküle
Jedes Molekül mit Atomen hat allgemein


Freiheitsgrade, weil man für jedes Atom drei Koordinaten braucht, um seine Position zu definieren. Diese kann man formal in Translations-, Rotations- und innere Schwingungsfreiheitsgrade einteilen:

Für -atomige Moleküle gilt:
| lineare Moleküle | nicht lineare Moleküle | |
|---|---|---|
| Summe |








Komplexe Moleküle mit vielen Atomen haben daher viele Schwingungsfreiheitsgrade (siehe Molekülschwingung) und liefern somit einen hohen Beitrag zur Entropie.
Bei Molekülen, die auf Festkörperoberflächen adsorbiert sind, kann die Anzahl an Freiheitsgrade reduziert sein. Beispielsweise kann statt drei Rotationsfreiheitsgraden eines Moleküls in der Gasphase für das adsorbierte Molekül nur einer möglich sein. Gleiches gilt für Translationsfreiheitsgrade, die z. B. von drei (Gasphase) zu nur zwei im Fall der Adsorption werden können. Aufgrund der diskreten Energieniveaus der Quantenmechanik können bei niedrigen Energien meist nicht alle Freiheitsgrade angeregt werden, da der erste angeregte Zustand bereits eine zu hohe Energie besitzt. Dadurch kann ein System bei einer gegebenen Temperatur effektiv weniger Freiheitsgrade haben:

Zum Beispiel hat ein Atom bei Raumtemperatur effektiv nur die drei Translationsfreiheitsgrade, da die mittlere Energie so niedrig ist, dass atomare Anregungen praktisch nicht vorkommen.
Das Konzept der Freiheitsgrade aus der Mechanik taucht auch in der statistischen Mechanik und Thermodynamik auf: die Energie eines thermodynamischen Systems verteilt sich gemäß dem Äquipartitionstheorem gleichmäßig auf die einzelnen Freiheitsgrade. Die Zahl der Freiheitsgrade geht in die Entropie ein, die ein Maß für die Zahl der erreichbaren Zustände ist. Thermodynamische Systeme haben generell sehr viele Freiheitsgrade, etwa in der Größenordnung von 1023, der Größenordnung der Avogadro-Konstanten, da sie üblicherweise Stoffmengen in der Größenordnung eines Mols enthalten. Es können allerdings viele gleichartige Systeme mit jeweils nur wenigen Freiheitsgraden zustande kommen, z. B. 1023 Atome mit effektiv (s. u.) je drei Freiheitsgraden.
Man kann die innere Energie eines idealen Gases mit Teilchen in Abhängigkeit von der Temperatur und der Anzahl der Freiheitsgrade eines Gasteilchens angeben:





mit der Boltzmann-Konstante .

Hierbei ist wichtig, dass Schwingungen bei der Bestimmung von doppelt gezählt werden, da sie sowohl kinetische als auch potentielle Energie besitzen (s. u.):

| Stoff | Freiheitsgrade | |||||
|---|---|---|---|---|---|---|
| Gasmolekül, 1-atomig | 3 | 0 | 0 | 3 | 3 | 3 |
| Gasmolekül, 2-atomig | 3 | 2 | 1 | 6 | 5 | 7 |
| Gasmolekül, 3-atomig linear | 3 | 2 | 4 | 9 | 13 | |
| Gasmolekül, 3-atomig gewinkelt | 3 | 3 | 3 | 9 | 12 | |
| 1 Atom im Festkörper | 0 | 0 | 3 | 3 | 6 | |

Ein zweiatomiges Molekül wie molekularer Wasserstoff hat – neben den elektronischen Anregungen – sechs Freiheitsgrade: drei der Translation, zwei der Rotation, und einen Schwingungsfreiheitsgrad. Rotation und Schwingung sind quantisiert und bei geringer Gesamtenergie eines Moleküls können Rotations- und Schwingungszustände über dem Grundzustand nicht angeregt werden; man sagt, diese Freiheitsgrade seien „eingefroren“. Rotation wird bereits ab mittleren, Schwingung erst bei höheren Temperaturen angeregt. So verhalten sich die meisten zweiatomigen Gase wie z. B. Wasserstoff, Sauerstoff oder Stickstoff unter Normalbedingungen effektiv so, als hätten die Einzelmoleküle nur fünf Freiheitsgrade, was sich am Adiabatenexponenten ablesen lässt. Bei sehr tiefen Temperaturen haben sie nur drei Freiheitsgrade, bei hohen Temperaturen sind dem System alle Freiheitsgrade zugänglich.
Freiheitsgrade der Zustandsgrößen
Die thermodynamischen Freiheitsgrade der Zustandsgrößen auf makroskopischer Ebene ergeben sich für beliebige Systeme im thermodynamischen Gleichgewicht über die Gibbssche Phasenregel.[5]
Weblinks
- chemgapedia.de – Freiheitsgrade von Molekülen (mit Animationen)
Einzelnachweise
- Eberhard Brommundt, Gottfried Sachs, Delf Sachau: Technische Mechanik. Eine Einführung. 4., verbesserte und erweiterte Auflage. Oldenbourg. München u. a. 2007, ISBN 978-3-486-58111-9, S. 47 ff.
- Freiheitsgrad. In: Lexikon der Physik. Spektrum Akademischer Verlag, abgerufen am 7. Mai 2017.
- Wolfgang H. Müller, Ferdinand Ferber: Technische Mechanik für Ingenieure. 3., neu bearbeitete Auflage. Fachbuchverlag Leipzig im Carl-Hanser-Verlag, München u. a. 2008, ISBN 978-3-446-41423-5.
- Kurt Magnus, Hans H. Müller-Slany: Grundlagen der Technischen Mechanik. 7. Auflage. Springer Fachmedien Wiesbaden GmbH, ISBN 978-3-8351-0007-7, S. 165 (eingeschränkte Vorschau in der Google-Buchsuche).
- Karl Stephan, Franz Mayinger: Thermodynamik: Band 2 14. neubearbeitete und erweiterte Auflage., Springer 1999, ISBN 978-3-540-64481-1, S.74