Starrer Körper
Der starre Körper ist in der klassischen Mechanik eine idealisierte Modellvorstellung, die von einem nicht verformbaren Körper ausgeht. Der Körper kann eine kontinuierliche Massenverteilung aufweisen oder ein System von diskreten Massenpunkten sein (z. B. Atome, Moleküle). Die Nichtverformbarkeit bedeutet, dass zwei beliebige Punkte des Körpers unabhängig von äußeren Kräften immer den gleichen Abstand zueinander besitzen. Verformungen wie Durchbiegung, Kompression, Dehnung oder innere Schwingungen werden damit ausgeschlossen.
Die Mechanik starrer Körper oder Stereomechanik (von griechisch στερεός stereós, deutsch ‚steif, hart, fest‘[1]) befasst sich mit der Bewegung starrer Körper unter dem Einfluss äußerer Kräfte. Ein wichtiges Teilgebiet ist die Statik starrer Körper, die sich mit ruhenden starren Körpern befasst. Als Bewegungen treten in der Mechanik starrer Körper ausschließlich Translationsbewegungen des gesamten Körpers in eine Richtung und Rotationsbewegungen des Körpers um eine Achse auf. Zusätzliche Bewegungsformen, wie Schwingungen einzelner Massenpunkte oder Verformungen des Körpers, werden in der allgemeineren Mechanik fester Körper mit den Methoden der Kontinuumsmechanik, Elastizitätstheorie, Plastizitätstheorie oder Festigkeitslehre behandelt.
In der Realität gibt es keine starren Körper, da sich jeder Körper unter der Einwirkung von Kräften verformt. Häufig sind die Verformungen jedoch so gering, dass sie für Berechnungen vernachlässigt werden können und diese Idealisierung probat ist.
Die Modellvorstellung des starren Körpers findet so vielfache Anwendung, insbesondere in den Teilgebieten der Statik und der Kinematik der Technischen Mechanik, sowie als Anwendung in der Robotik, der Auslegung von Fahrwerken und Motoren, siehe Mehrkörpersystem und Mehrkörpersimulation. Die Kreiseltheorie ist die Wissenschaft von der Drehung starrer Körper.
Typologie starrer Körper und Systeme mehrerer starrer Körper
In der Technischen Mechanik gibt es zahlreiche Varianten des starren Körpers, die sich in ihrer Ausdehnung und ihren Belastungen unterscheiden. Außerdem gibt es noch zusammengesetzte starre Körper.[2][3][4]
Annähernd eindimensionale Körper sind Balken und Stab. Bei ihnen ist die Länge deutlich größer als die Breite oder Tiefe.
- An einem Stab greifen nur Zug- oder Druckkräfte an.
- An einem Balken können auch Querkräfte und Momente angreifen, die ihn verbiegen oder tordieren (verdrillen).
- Gekrümmte Balken werden als Bogen bezeichnet.
- Werden mehrere Stäbe oder Balken zusammengesetzt mit einer Verbindung die ebenfalls starr ist, so erhält man einen Rahmen. Manchmal werden auch gelenkige Verbindungen von Balken als Rahmen bezeichnet.
Flächige Körper sind:
- Die Scheibe, bei der sämtliche auftretenden Kräfte oder Momente in der Ebene liegen, in der sich die Scheibe befindet, beispielsweise eine Mauer, die durch ihr Eigengewicht belastet wird.
- Die Platte, bei der die Kräfte oder Momente in einem beliebigen Winkel angreifen. Dazu zählt eine Decke, die durch Auflasten belastet ist und eine gewisse Spannweite hat, oder eine Mauer, wenn Seitenwinde sie belasten.
- Die Schale, die nicht eben ist, sondern gekrümmt. Ein Spezialfall ist die Membran.
Wenn einzelne starre Körper durch Gelenke oder Kraftelemente miteinander verbunden sind, so spricht man von einem System starrer Körper.
Reine Drehbewegung eines starren Körpers
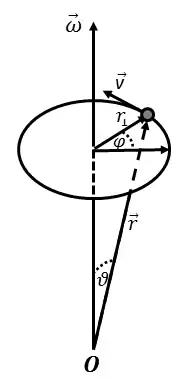


Wird eine Drehachse festgelegt, so wird eine fortdauernde Rotation durch die Winkelgeschwindigkeit beschrieben. Sie ist ein Vektor in Richtung der Drehachse, wobei sein Betrag die Geschwindigkeit angibt, mit der der Drehwinkel wächst. Jeder Punkt des Körpers bewegt sich mit der Bahngeschwindigkeit

in konstantem Abstand von der Drehachse auf einem Kreis, der senkrecht zur Drehachse liegt. Dabei ist der Ortsvektor des Punktes in einem Koordinatensystem, dessen Ursprung auf der Drehachse liegt. In Richtung des Vektors gesehen, findet die Rotation im Uhrzeigersinn statt (wie bei der Korkenzieherregel).


Herleitung: Bei konstanter Drehgeschwindigkeit durchläuft der Punkt in der Zeit einen Kreis mit dem Umfang , hat also die Geschwindigkeit . Das ist gleich dem Betrag des Vektors (Kreuzprodukt), der auch die Richtung von richtig angibt. Diese Betrachtung gilt auch für jeden anderen mitgedrehten Vektor, z. B. für die Basisvektoren eines körperfesten Koordinatensystems. Deren Änderungsgeschwindigkeit ist





- .

Mehrere gleichzeitig ablaufende Drehbewegungen mit verschiedenen Winkelgeschwindigkeiten sind äquivalent zu einer einzigen Drehbewegung mit der Winkelgeschwindigkeit , die die vektorielle Summe aller einzelnen Winkelgeschwindigkeiten ist: . Es findet also insgesamt zu jedem Zeitpunkt immer nur eine wohlbestimmte Rotation um eine wohlbestimmte Achse statt.


Ebenso gehören zu jeder endlichen Drehung eine bestimmte Achse und ein bestimmter Drehwinkel. Mehrere hintereinander ausgeführte endliche Drehungen sind äquivalent zu einer einzigen endlichen Drehung, deren Achse allerdings nicht mit der Vektorsumme der einzelnen Drehachsen zu ermitteln ist. Auch hängt bei nacheinander ausgeführten Drehungen um verschiedene Achsen der Endzustand von der Reihenfolge ab. Dies gilt jedoch nicht für infinitesimale Drehungen, siehe den Eintrag zur Kommutativität der Addition von Winkelgeschwindigkeiten. Deshalb besitzt die Winkelgeschwindigkeit den Vektorcharakter, der für die einfache mathematische Beschreibung wesentlich ist. Zudem besitzen alle Teilchen eines ausgedehnten starren Körpers dieselbe Winkelgeschwindigkeit, siehe dort.
Statt durch Drehachse und Drehwinkel wird eine endliche Drehung häufig durch die drei Eulerwinkel parametrisiert. Sie sind die Drehwinkel von drei Drehungen um festgelegte Koordinatenachsen, die in festgelegter Reihenfolge ausgeführt werden und so die betrachtete Drehung ergeben. Diese Darstellung eignet sich oft besser für konkrete Berechnungen. Sie lässt sich in die Darstellung mit vektorieller Drehachse und Drehwinkel umrechnen[5], die Formeln haben aber wenig praktische Bedeutung. Weitere Parametrisierungsmöglichkeiten für Drehungen finden sich in den Einträgen Quaternion, Rodrigues-Formel, Euler-Rodrigues-Formel und Orthogonaler Tensor.
Allgemeine Bewegungen starrer Körper
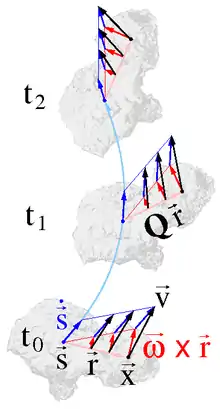
Die Bewegung des Körpers lässt sich in eine gleichmäßige Translation aller Partikel des Körpers (und damit auch des Körperschwerpunkts) und eine Rotation zerlegen, siehe Bild. Die Translation werde durch die Bewegung eines Bezugspunkts beschrieben (blau im Bild), um den sich der Starrkörper dreht.

Im drei-dimensionalen führt die Berechnung der Geschwindigkeit eines sich zur Zeit t am Ort befindlichen Partikels des Starrkörpers auf die eulersche Geschwindigkeitsgleichung:



Die Beschleunigung ergibt sich zu:

Dabei ist die Winkelgeschwindigkeit, die Winkelbeschleunigung des starren Körpers und die Beschleunigung des Bezugspunkts. Das Argument des Geschwindigkeits- und Beschleunigungsfeldes ist ein Raumpunkt und darf keineswegs mit dem Partikel verwechselt werden, das sich dort aufhält.


Die Herleitung dieser in eulerscher Darstellung vorliegenden Bewegungsgleichungen gelingt in der lagrangeschen Darstellung wie folgt.
Sei die Funktion, die den Raumpunkt angibt, an dem sich ein Partikel P des Starrkörpers zur Zeit t aufhält. Für ein festgehaltenes Partikel P beschreibt seine Bahnlinie durch den Raum. Sei S der Bezugspunkt, dessen Bahnlinie mit gegeben ist. Die Verbindungslinie des Partikels P zum Bezugspunkt S führt eine Drehung aus, die mit einer orthogonalen Abbildung (Drehmatrix im Koordinatenraum oder eigentlich Orthogonaler Tensor im euklidischen Vektorraum ) beschrieben werden kann:







Der Vektor (im Bild kurz mit bezeichnet) weist zu einem bestimmten Zeitpunkt vom Bezugspunkt S zum Partikel P. Der Zeitpunkt ist willkürlich gewählt aber fest. Entsprechend ist mit der Einheitsmatrix 1 und für jede Drehmatrix gilt ferner , wo die Transposition markiert. Die Bewegungsfunktion des Partikels P lautet damit:






Die Geschwindigkeit des Partikels ergibt sich durch die Ableitung nach der Zeit, die in der Newton-Notation mit einem Überpunkt notiert wird:

Die Winkelgeschwindigkeitsmatrix ist wegen


schiefsymmetrisch und besitzt im drei-dimensionalen Raum einen dualen Vektor für den gilt:

Mit diesem dualen Vektor, der hier die Winkelgeschwindigkeit darstellt, ergibt sich das Geschwindigkeitsfeld in lagrangescher Darstellung zu:

Die Geschwindigkeit des Partikels P am Ort ist also , was in eulerscher Darstellung auf die eulersche Geschwindigkeitsgleichung führt:


Die Zeitableitung des Geschwindigkeitsfelds in lagrangescher Darstellung ergibt:

oder in drei Dimensionen mit dem dualen Vektor:

Die Beschleunigung des Parikels P am Ort ist also , was in eulerscher Darstellung wie oben bereits angegeben so geschrieben werden kann:


Hier wird die obige Aussage deutlich: Das Argument des Geschwindigkeits- und Beschleunigungsfeldes ist ein Raumpunkt und nicht das Partikel P, das sich dort aufhält.
Freiheitsgrade und Konfigurationsraum
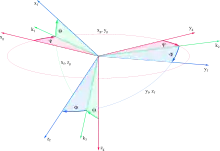
Die Freiheitsgrade eines n-Teilchen-Systems bilden einen sogenannten Konfigurationsraum. Dieser setzt sich bei starren Körpern aus drei Freiheitsgraden bezüglich der Position und drei weiteren bezüglich der Orientierung zusammen. Neben verschiedenen ortsfesten Koordinatensystemen, die eine Beschreibung der Position erlauben, bieten die Eulerschen Winkel eine Möglichkeit zur Beschreibung der Orientierung, die besonders in der Luft- und Raumfahrt eine wichtige Rolle einnimmt.
Zur Anschauung kann ein freier Körper wie ein (kunstflugtaugliches) Flugzeug herangezogen werden, welches drei Freiheitsgrade einer geradlinigen Bewegung besitzt, da es sich frei in drei Raumdimensionen bewegen kann. Hinzu kommen drei weitere Freiheitsgrade der Drehungen um räumliche (unabhängige) Drehachsen.
Offensichtlich vermindert nun jede Einschränkung der Bewegungsmöglichkeit die Anzahl der Freiheitsgrade. Wird beispielsweise ein Massenpunkt des starren Körpers räumlich fixiert, so kann man in diesen den Ursprung des Bezugssystems legen. Damit fallen die drei Freiheitsgrade der Translation weg. Dadurch reduziert sich die Bewegung auf eine reine Änderung der Orientierung und es bleiben nur mehr drei Freiheitsgrade. Wird ein weiterer Punkt festgehalten, so kann der Körper nur noch um eine raumfeste Drehachse rotieren und hat damit nur noch einen Freiheitsgrad, nämlich die Rotation um diese Achse. Legt man schließlich noch einen dritten Punkt des Körpers fest, der sich nicht auf der Achse der ersten zwei Punkte befindet, so verliert er auch den letzten Freiheitsgrad und ist damit bewegungslos. Jede weitere räumliche Fixierung von Punkten führt nunmehr zu einer sogenannten statischen Überbestimmtheit, die in der Statik eine wichtige Rolle spielt.
Ansätze zur Bestimmung der Bewegungsgleichung
Nach der Modellvoraussetzung gelten konstante Distanzen zwischen den Teilchen. Aus dem Schwerpunktsatz lassen sich nun einige Folgerungen ziehen:
- Für die Wirkung eines Systems äußerer Kräfte auf einen starren Körper sind nur die resultierende Kraft und das resultierende Drehmoment entscheidend. Alle Kräftesysteme mit gleichen Resultierenden sind somit in ihrer Wirkung äquivalent.
- Der Trägheitstensor eines starren Körpers ist bezüglich eines körperfesten Schwerpunktsystems konstant.



Häufig werden dem Modell zudem weitere Idealisierungen zugrunde gelegt, die es erlauben sogenannte Erhaltungssätze zur Bestimmung der Bewegungsgleichung einzuführen:
Wird ein abgeschlossenes System angenommen, so folgt aus dem Impulserhaltungssatz, dass der vektorielle Impuls des Systems bezüglich seines Schwerpunktes konstant ist:


Aus dem Drehimpulserhaltungssatz folgt, dass der vektorielle Gesamtdrehimpuls des Systems bezüglich seines Schwerpunktes konstant ist:


In den beiden Formeln bezeichnen
- die Masse des Körpers,
- den Schwerpunkt des Körpers,
- den Trägheitstensor des starren Körpers bezüglich seines Schwerpunktes und
- () die vektorielle Winkelgeschwindigkeit zum Zeitpunkt




In nicht abgeschlossenen Systemen entspricht die Änderung des Impulses der von außen angreifenden, resultierenden Kraft und es gilt das zweite Newtonsche Gesetz:

Weiter ist nach dem Drallsatz die Änderung des Drehimpulses gleich dem von außen angreifenden, resultierenden Moment. Bezüglich des Schwerpunkts des Körpers oder eines unbeschleunigten Bezugspunkts gilt die Eulersche Gleichung:

Wird ein konservatives Kraftfeld zugrunde gelegt, so folgt aus dem Energieerhaltungssatz, dass die mechanische Gesamtenergie konstant ist:


Dabei bezeichnen:
- die Translationsenergie und
- die Rotationsenergie, die beide zusammen die kinetische Energie des Körpers zum Zeitpunkt bilden, und
- ist die potentielle Energie zum Zeitpunkt .



Eine Formänderungsenergie, die bei nicht starren, elastischen Körpern noch zu addieren wäre, entfällt hier per definitionem.
Eindeutigkeit der Winkelgeschwindigkeit
Die Winkelgeschwindigkeit ist unabhängig davon, welcher Punkt als Bezugspunkt der Starrkörperbewegung gewählt wird. Wenn also zwei verschiedene Formulierungen

für dieselbe Bewegung vorliegen, dann ist – zumindest in nicht eindimensionalen Körpern. Denn die Geschwindigkeit des ersten Bezugspunkts kann mit dem zweiten Geschwindigkeitsfeld ausgedrückt werden:


Vergleich der Geschwindigkeitsfelder zeigt:

Bei verschiedenen Winkelgeschwindigkeiten muss also für alle Punkte im Körper sein, was nur in ein-dimensionalen Körpern der Fall sein kann. Bei flächigen oder voluminösen Körpern müssen die Winkelgeschwindigkeiten übereinstimmen: .


Bornsche Starrheit
Das Konzept des starren Körpers ist inkonsistent mit den Vorhersagen der Relativitätstheorie, da nach ihm stets der gesamte Körper auf Kräfte und Drehmomente gleichzeitig reagiert, was impliziert, dass ihre Wirkungen sich innerhalb des Körpers mit unendlicher Geschwindigkeit ausbreiten, insbesondere also schneller als mit der Vakuumlichtgeschwindigkeit c. Bei realen Körpern breiten sich Wirkungen hingegen üblicherweise mit der für den Körper spezifischen Schallgeschwindigkeit aus, die weit unterhalb von c liegt.
Weblinks
- Starrer Körper. In: Lexikon der Physik. Spektrum Akademischer Verlag, Heidelberg 1998 (spektrum.de).
- Rudolf Gross, Achim Marx: Kap. 2: Mechanik des Starren Körpers. (pdf) In: Vorlesungsskript Physik I. BAdW, 1999.
- Band 6: Mechanik starrer Körper. In: Wikibook: Einführung in die Theoretische Physik.
- Anton Gferrer: Kinematik und Robotik. (pdf) 2. Fassung. November 2008 (deutsch).
Einzelnachweise
- DWDS − stereo- − Worterklärung, Grammatik, Etymologie u. v. m. Berlin-Brandenburgische Akademie der Wissenschaften, abgerufen am 29. Februar 2020.
- Gross et al.: Technische Mechanik, Springer, 11. Auflage, S. 117.
- Mahnken: Technische Mechanik, Springer, 2012, S. 224.
- Dinkler: Grundlagen der Baustatik, Springer, 4. Auflage, S. 15–18.
- Albrecht Lindner: Drehimpulse in der Quantenmechanik. Teubner-Studienbücher, Stuttgart 1984, S. 77.