Winkelgeschwindigkeit
Die Winkelgeschwindigkeit ist in der Physik eine vektorielle Größe, die angibt, wie schnell sich ein Winkel mit der Zeit um eine Achse ändert. Ihr Formelzeichen ist (kleines Omega). Die SI-Einheit der Winkelgeschwindigkeit ist . Sie spielt insbesondere bei Rotationen eine Rolle und wird dann auch als Rotationsgeschwindigkeit oder Drehgeschwindigkeit bezeichnet. In vielen Fällen, bei denen sich die Richtung der Drehachse im Bezugssystem nicht ändert, reicht die skalare Verwendung als Betrag des Vektors aus.


| Physikalische Größe | |||||||
|---|---|---|---|---|---|---|---|
| Name | Winkelgeschwindigkeit, Rotationsgeschwindigkeit, Drehgeschwindigkeit | ||||||
| Formelzeichen | |||||||
| Abgeleitet von | Winkel | ||||||
| |||||||
Definitionen
Winkelgeschwindigkeit
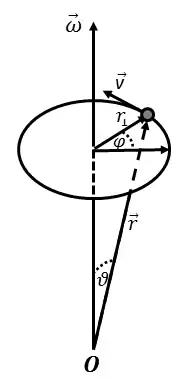

Die Winkelgeschwindigkeit wird durch einen Pseudovektor dargestellt, der die Richtung der Drehachse und die Schnelligkeit der Rotationsbewegung angibt; sie gilt für jeden Punkt des rotierenden Systems, ihr Vektor ist nicht nur in der Rotationsachse platziert. Die Richtung des Pseudovektors ist so orientiert, dass sie gemäß der Korkenzieherregel die Rotationsrichtung angibt. Der Betrag der Winkelgeschwindigkeit ist gleich der Ableitung des Rotationswinkels nach der Zeit :




Bei konstanter Winkelgeschwindigkeit gilt daher
- ,

denn in der Umlaufzeit wird der Winkel 2 durchlaufen.


Bei einer ebenen Kreisbewegung ändert sich die Richtung der momentanen Bahngeschwindigkeit eines Punktes mit der gleichen Winkelgeschwindigkeit wie der Radiusvektor des Punktes. Bei einer im Raum gekrümmten Bahnkurve gilt dies für den momentanen Krümmungskreis. Die Änderung der Richtung der Bahngeschwindigkeit kann man daher genauso gut zu einer Definition der Winkelgeschwindigkeit nutzen. Sie ergibt sich direkt aus den Daten der Bahn und erfordert keine Bestimmung einer Drehachse.
Der Betrag der Winkelgeschwindigkeit wird meist bei Vorgängen verwendet, bei denen sich die Drehachse nicht ändert. Eine Änderung von Richtung und/oder Betrag der Winkelgeschwindigkeit ist Folge einer Winkelbeschleunigung.

Bahngeschwindigkeit
Jeder Punkt des rotierenden Systems beschreibt eine Kreisbahn, deren Ebene senkrecht zur Drehachse liegt. Die Bahn- oder Umlaufgeschwindigkeit des Punktes auf diesem Kreis ist dem Betrag nach
- ,

wobei der Radius der Kreisbewegung ist. Denn zur infinitesimalen Zeitspanne gehört der infinitesimale Weg .



Liegt der Ursprung des Koordinatensystems auf der Drehachse, dann ist die Bahngeschwindigkeit nach Richtung und Betrag gleich dem Kreuzprodukt aus Winkelgeschwindigkeit und Ortsvektor:

- ,

denn der Abstand von der Achse ist

mit dem Polarwinkel , der den konstant bleibenden Winkelabstand zwischen der Drehachse und dem Ortsvektor zum betrachteten Punkt angibt.

Diese Betrachtung der Änderungsgeschwindigkeit des Ortsvektors gilt für jeden Vektor, der einer Drehung unterworfen ist, z. B. für die Basisvektoren () eines rotierenden Bezugssystems. Deren Änderungsgeschwindigkeit ist


- .

Abgrenzung zur Kreisfrequenz
Obwohl die Kreisfrequenz und die Winkelgeschwindigkeit mit demselben Formelzeichen bezeichnet werden und obwohl sie in derselben Einheit gemessen werden, handelt es sich um zwei verschiedene physikalische Größen.
Die Winkelgeschwindigkeit gibt die Änderungsrate eines geometrischen Winkels an und wird im Zusammenhang von Drehbewegungen verwendet.
Die Kreisfrequenz dagegen ist eine abstrakte Größe im Kontext von Schwingungen.[1] Eine Schwingung kann mathematisch durch einen rotierenden Zeiger dargestellt werden (siehe Zeigermodell). Der Winkel des Zeigers wird als Phase oder Phasenwinkel bezeichnet.[2] Die Änderungsgeschwindigkeit dieses Phasenwinkels ist die Kreisfrequenz. Sie ist also – wie auch die Frequenz – ein Maß dafür, wie schnell eine Schwingung abläuft und hat – abgesehen von der Rotation des gedachten Zeigers – nichts mit einer Drehbewegung zu tun.
Winkelgeschwindigkeit des Sehstrahls
Ebene Bewegung
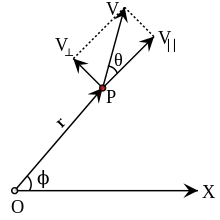
Der Geschwindigkeitsvektor v eines Teilchens P relativ zu einem Beobachter O kann in Polarkoordinaten zerlegt werden. Die radiale Komponente des Geschwindigkeitsvektors ändert die Richtung des Sehstrahls nicht. Zwischen der tangentialen Komponente und der Winkelgeschwindigkeit des Sehstrahls besteht die Beziehung:

Es ist anzumerken, dass die Winkelgeschwindigkeit des Sehstrahls vom (willkürlich) gewählten Ort des Beobachters abhängt.
Räumliche Bewegung
In drei Dimensionen ist die Winkelgeschwindigkeit durch ihren Betrag und ihre Richtung gekennzeichnet.
Wie im zweidimensionalen Fall hat das Teilchen eine Komponente seines Geschwindigkeitsvektors in Richtung des Radiusvektors und eine weitere senkrecht dazu. Die Ebene mit Stützvektor (Ort des Beobachters) und Richtungsvektoren und definiert eine Rotationsebene, in der das Verhalten des Teilchens für einen Augenblick wie im zweidimensionalen Fall erscheint. Die Rotationsachse ist dann senkrecht zu dieser Ebene und definiert die Richtung des Vektors der momentanen Winkelgeschwindigkeit. Radius- und Geschwindigkeitsvektor werden als bekannt vorausgesetzt. Es gilt dann:




Auch hier gilt, dass die so berechnete Winkelgeschwindigkeit vom (willkürlich) gewählten Ort des Beobachters abhängt. Zum Beispiel ergibt sich in Zylinderkoordinaten (ρ, φ, z) mit und daraus berechnetem :



Dabei sind die Basisvektoren zu Zylinderkoordinaten.

In Kugelkoordinaten (r, θ, φ) folgt analog .

Eine Anwendung ist die Relativbewegung von Objekten in der Astronomie (siehe Eigenbewegung (Astronomie)).
Winkelgeschwindigkeit bei speziellen Bewegungsansätzen
Bei der Rotation von Körpern können Winkel zur Parametrisierung der Bewegung eingesetzt werden. Im Folgenden wird eine Auswahl häufig genutzter Ansätze beschrieben.
Euler-Winkel in der z-y′-x″-Konvention
Im Fahrzeug- oder Flugzeugbau wird die Orientierung des fahrzeugfesten Systems relativ zum erdfesten System in Euler-Winkeln angegeben. Genormt sind drei aufeinander folgende Drehungen. Zuerst um die z-Achse des Systems g (Gierwinkel), dann um die y-Achse des gedrehten Systems (Nickwinkel) und schließlich um die x-Achse des körperfesten Koordinatensystems (Wank/Rollwinkel).
Die Winkelgeschwindigkeit des körperfesten Systems ergibt sich aus den Winkelgeschwindigkeiten um diese Achsen.

Der aufgesetzte Punkt bezeichnet die Zeitableitung. Diese Basis ist nicht orthonormal. Die Einheitsvektoren können jedoch mit Hilfe von Elementardrehungen berechnet werden.
Euler-Winkel in der z-x′-z″-Konvention
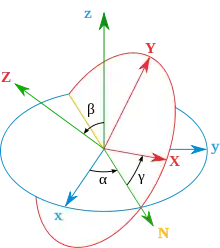
In der Standard-x-Konvention (z, x′, z″), siehe Bild, wird zunächst mit dem Winkel α um die raumfeste z-Achse gedreht, dann mit dem Winkel β um die x-Achse in ihrer Lage nach der ersten Drehung (x′-Achse, im Bild die N-Achse) und schließlich mit dem Winkel γ um die z-Achse in deren Lage nach den beiden vorherigen Drehungen (Kurzzeichen z″, im Bild die Z-Achse).
Bezeichnen die Einheitsvektoren die raumfeste Standardbasis (blau im Bild), dann lautet die Winkelgeschwindigkeit bezüglich der raumfesten Basis


In der bewegten Basis (rot im Bild) ergibt sich gleichbedeutend:


Zylinderkoordinaten
Im Zylinderkoordinatensystem (ρ, φ, z) lauten die Basisvektoren

Ändert sich der Winkel φ, dann entsteht die Winkelgeschwindigkeit . Mit ihr berechnen sich die Raten der Basisvektoren, beispielsweise


Dies ergibt sich aus den Euler-Winkeln in der z-x′-z″-Konvention mit
- α = φ und β = γ ≡ 0 oder
- γ = φ und α = β ≡ 0.
Kugelkoordinaten
In Kugelkoordinaten (r, φ, θ) können die Basisvektoren

benutzt werden. Bei einer gemeinsamen Rotation dieser Basisvektoren mit variablen Winkeln φ und θ entsteht die Winkelgeschwindigkeit

Mit ihr berechnen sich die Raten der Basisvektoren, beispielsweise gemäß

Dies ergibt sich aus den Euler-Winkeln in der z-x′-z″-Konvention mit α ≡ 0, β = φ und γ = θ sowie der zyklischen Vertauschung der Koordinatenrichtungen 123Euler → 312Kugel.
Winkelgeschwindigkeitstensoren



Definition des Winkelgeschwindigkeitstensors
Das Kreuzprodukt der Winkelgeschwindigkeit mit dem Ortsvektor kann als Vektortransformation des Ortsvektors durch den Winkelgeschwindigkeitstensor angesehen werden.
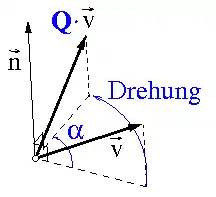
Denn eine reine Drehung von Vektoren wird durch orthogonale Tensoren, das sind orthogonale Abbildungen von Vektoren auf Vektoren, dargestellt: , siehe Bild. Darin ist Q der orthogonale Tensor mit der Eigenschaft (1 ist der Einheitstensor, das hochgestellte T bezeichnet die Transposition) und ist der Vektor, auf den der feste Vektor abgebildet wird. Zeitableitung ergibt:





Der hier auftretende Winkelgeschwindigkeitstensor Ω ist schiefsymmetrisch (Ω┬=−Ω) wegen

Winkelgeschwindigkeitstensor und Winkelgeschwindigkeit
Jeder schiefsymmetrische Tensor W besitzt einen dualen Vektor mit der Eigenschaft für alle . Dieser duale Vektor ist beim Winkelgeschwindigkeitstensor die Winkelgeschwindigkeit:



Der duale Vektor

ist die negative Hälfte der Vektorinvariante des Tensors und als solche ein axialer Vektor. Die Koordinaten Ωij des Tensors Ω gehören zur Standardbasis

Umgekehrt kann der Winkelgeschwindigkeitstensor aus der Winkelgeschwindigkeit gewonnen werden:

vgl. Kreuzproduktmatrix. Das Rechenzeichen „“ bildet das dyadische Produkt.

Winkelgeschwindigkeitstensor bei rotierenden Vektorraumbasen
Aus den Raten von Vektoren einer Vektorraumbasis, die eine Starrkörperrotation ausführt, kann der Winkelgeschwindigkeitstensor direkt berechnet werden.

Denn der Tensor , in dem die Basisvektoren spaltenweise eingetragen sind, ist nach Voraussetzung invertierbar:


Darin stehen die senkrechten Striche für die Determinante, deren Nichtverschwinden die Invertierbarkeit garantiert. Im Fall einer gemeinsamen Starrkörperrotation der Basisvektoren folgt:

Umgekehrt gilt: Wenn die Zeitableitung eines Tensors G, multipliziert mit seiner Inversen G−1, schiefsymmetrisch ist, dann können die Spaltenvektoren des Tensors als rotierende Basis aufgefasst werden. Im Fall, dass die Vektoren eine Orthonormalbasis bilden, ist der Tensor G orthogonal und es ergibt sich die schon erwähnte Beziehung

Exponential des Winkelgeschwindigkeitstensors
Bei konstanter Winkelgeschwindigkeit ist der Winkelgeschwindigkeitstensor ebenfalls konstant. Dann kann bei gegebenen Anfangswert G(t=0) über die Zeit integriert werden mit dem Ergebnis:


Denn die ersten vier Potenzen von Ω berechnen sich mit der BAC-CAB-Formel zu

Oben ist die Einsteinsche Summenkonvention anzuwenden, der zufolge über in einem Produkt doppelt vorkommende Indizes von eins bis drei zu summieren ist. Nach vollständiger Induktion ergeben sich die Potenzen

für k = 1, 2, 3, … (keine Summen) Mit der Definition Ω0 := 1 kann das Exponential exp des Winkelgeschwindigkeitstensors mit der Taylorreihe ermittelt werden:

Die letzte Gleichung stellt einen orthogonalen Tensor dar. Wenn Ω nur als schiefsymmetrischer Tensor ohne das Kreuzprodukt definiert wird, lässt sich das auf Drehungen in n Dimensionen verallgemeinern.
Winkelgeschwindigkeit des starren Körpers
Die Winkelgeschwindigkeit eines rotierenden starren Körpers oder Bezugssystems ist eine eindeutige Größe, unabhängig von der Wahl eines Bezugspunktes oder einer Drehachse, denn an allen Punkten dreht sich die Richtung der Bahngeschwindigkeit in derselben Umlaufzeit einmal um . Jeder Punkt eines starren Körpers hat den gleichen Winkelgeschwindigkeitsvektor.

Eindeutigkeit
Der starre Körper möge um eine beliebige Achse rotieren. Es wird gezeigt, dass die Winkelgeschwindigkeit unabhängig ist von der Wahl des Bezugspunkts, durch den die Achse führt. Dies bedeutet, dass die Winkelgeschwindigkeit eine unabhängige Eigenschaft des rotierenden starren Körpers ist.
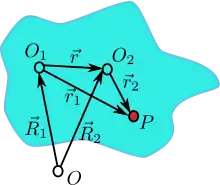
Der Ursprung des Laborsystems ist in O, während O1 und O2 zwei Punkte auf dem starren Körper mit den Geschwindigkeiten bzw. sind. Angenommen, die Winkelgeschwindigkeit relativ zu O1 bzw. O2 sei bzw. Da Punkt P und O2 jeweils nur eine Geschwindigkeit haben, gilt:






Einsetzen der unteren Gleichung für in die obere ergibt:

Da der Punkt P (und damit ) beliebig wählbar ist, folgt daraus:


Die Winkelgeschwindigkeit des starren Körpers ist somit unabhängig von der Wahl des Bezugspunkts der Drehachse. Somit ist beispielsweise die Messung der Gierrate in einem Fahrzeug unabhängig vom Einbauort des Gierratensensors.
Kommutative Addition von Winkelgeschwindigkeiten


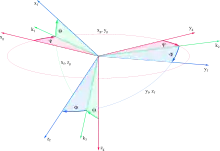
Obwohl Drehungen im Allgemeinen in ihrer Reihenfolge nicht vertauscht werden dürfen, ist bei der Winkelgeschwindigkeit die Kommutativität der Addition gegeben. Es spielt keine Rolle, in welcher Reihenfolge die Komponenten der Winkelgeschwindigkeit oder ganze Winkelgeschwindigkeitsvektoren addiert werden (anders als bei endlichen Drehungen, siehe Bild).
Mathematisch kann das durch Drehungen mit zwei Winkelgeschwindigkeiten in einem (infinitesimal) kleinen Zeitintervall dt gezeigt werden.[3] Im Zeitintervall dt bewegt sich ein Partikel am Ort nach . Eine weitere Drehung mit der Winkelgeschwindigkeit liefert die Endposition und die Verschiebung




Der Grenzwert dt → 0 kann berechnet werden:

Diese Geschwindigkeit entspricht einer Drehung mit der Winkelgeschwindigkeit . Bei umgekehrter Reihenfolge der infinitesimalen Drehungen leitet sich ein identisches Ergebnis für die Geschwindigkeit ab. Deswegen addieren sich Winkelgeschwindigkeiten wie Vektoren und infinitesimal kleine Drehungen sind – anders als große Drehungen – in ihrer Reihenfolge vertauschbar.


| Beweis mit Tensorrechnung |
| Drehungen können mit orthogonalen Tensoren beschrieben werden, von denen zwei, Q1,2, gegeben seinen. Mit den Definitionen
für k = 1, 2 berechnet sich die Geschwindigkeit eines Vektors , der durch Drehung aus dem festen Vektor hervorgeht, zu: Bei umgekehrter Reihenfolge der Rotationen, ergibt sich analog die im Allgemeinen andere Geschwindigkeit Diese Identitäten gelten bei beliebig großen Rotationen. Berechnung der Geschwindigkeiten im Zustand Q1,2 = 1 liefert die Winkelgeschwindigkeiten am Ort Dann ist und die obigen Gleichungen spezialisieren sich zu siehe Winkelgeschwindigkeitstensor und Winkelgeschwindigkeit. Weil die Addition von Tensoren kommutativ ist, stimmen die Geschwindigkeiten überein: |









Somit ist die Kommutativität der Addition der Winkelgeschwindigkeiten erwiesen.
Anwendungen und Beispiele
Die Winkelgeschwindigkeit tritt in vielen Gleichungen und Anwendungsfällen der Physik, der Astronomie oder der Technik auf.
- Ein Himmelskörper, der sich in einer Entfernung R von der Erde mit Geschwindigkeit senkrecht zur Sehlinie bewegt, zeigt am Himmel eine scheinbare Winkelgeschwindigkeit . Bei Meteoren (Sternschnuppen) kann sie bis zu 90° pro Sekunde ausmachen, sehr nahe Kleinplaneten oder Kometen können sich am Himmel einige Grad pro Stunde bewegen. Bei Sternen wird die Winkelgeschwindigkeit in Winkelsekunden pro Jahr angegeben und Eigenbewegung genannt.


- Nach dem dritten Kepler’schen Gesetz verhalten sich die Quadrate der Umlaufzeiten T der Planeten wie die dritten Potenzen der großen Halbachsen a ihrer Bahnen. Die Winkelgeschwindigkeiten verhalten sich demnach wie („Kepler-Rotation“). Gemäß dem zweiten Kepler’schen Gesetz ist die Winkelgeschwindigkeit eines Planeten auf einer elliptischen Umlaufbahn in Bezug auf die Sonne vom jeweiligen Abstand abhängig und variiert somit längs der Bahn. Sie ist am größten, wenn der Planet sich im Perihel befindet, und am kleinsten, wenn er sich im Aphel befindet.

- Bei der Rotation eines starren Körpers um eine ortsfeste Achse ist die Winkelgeschwindigkeit ω im Gegensatz zur Geschwindigkeit v vom Radius unabhängig. Seine Rotationsenergie und sein Drehimpuls sind Funktionen seiner Winkelgeschwindigkeit.
- Die Winkelgeschwindigkeit eines Rotors in einem Elektromotor, der sich konstant mit 3.000 Umdrehungen pro Minute dreht, beträgt

- Bei solchen Angaben von Drehzahlen werden auch Einheiten wie und verwendet, siehe dazu den Artikel Drehzahl.


- Sei die Kreisfrequenz der harmonischen Schwingung eines Pendels mit der Amplitude . Dann berechnet sich die Winkelgeschwindigkeit des Pendels als Funktion der Zeit:



- Bei Flugzeugen oder Pkw werden die Winkelgeschwindigkeiten in Komponenten des fahrzeugfesten Koordinatensystems angegeben. Entsprechend den x-, y-, z-Komponenten spricht man von Roll/Wankgeschwindigkeit, Nickgeschwindigkeit, Giergeschwindigkeit. Näheres dazu findet sich
- im Flugwesen unter Rollachse, Querachse, Gierachse und
- im Fahrzeugbau unter Fahrdynamik.
Literatur
Die Winkelgeschwindigkeit wird in vielen Lehrbüchern und Formelsammlungen der Natur- und Ingenieurswissenschaften behandelt.
- Horst Stöcker: Taschenbuch der Physik. 6. Auflage. Harri Deutsch, 2010, ISBN 978-3-8171-1860-1.
- Lothar Papula: Mathematik für Ingenieure und Naturwissenschaftler 1. 12. Auflage. Vieweg+Teubner, 2009, ISBN 978-3-8348-0545-4.
Einzelnachweise
- Manfred Knaebel, Helmut Jäger, Roland Mastel: Technische Schwingungslehre. Springer-Verlag, 2009, ISBN 978-3-8351-0180-7, S. 8 ff. (books.google.com.).
- Jürgen Eichler: Physik. Grundlagen für das Ingenieurstudium – kurz und prägnant. Springer DE, 2011, ISBN 978-3-8348-9942-2, S. 112, urn:nbn:de:1111-20110310734 (eingeschränkte Vorschau in der Google-Buchsuche).
- Institut für Physik an der Universität Rostock (Hrsg.): Theoretische Physik II – Theoretische Mechanik. Kapitel 5 – Starrer Körper und Kreiseltheorie. S. 109 (Seite nicht mehr abrufbar, Suche in Webarchiven: online [abgerufen am 6. Juni 2017]).