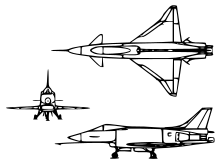
Rockwell-MBB X-31
Die X-31 war ein einstrahliges Experimentalflugzeug aus US-amerikanisch-deutscher Koproduktion. Das Flugzeug auf Basis des Entwurfs Taktisches Kampfflugzeug 90 (TKF-90)[1] diente zur praktischen Erprobung der Schubvektorsteuerung für Flüge jenseits des maximalen dynamischen Anstellwinkels. Das Konzept, auch nach dem Erreichen des maximalen Anstellwinkels noch kontrolliert weiterfliegen zu können (englisch post-stall technology (PST)), wurde von Messerschmitt-Bölkow-Blohm Ende der 1970er-Jahre erfunden und sollte die Manövrierfähigkeit zukünftiger Kampfflugzeuge erhöhen.[2] MBB und vor allem der Projektleiter und „Vater der X-31“, Wolfgang Herbst, sahen in der von ihnen so genannten Supermaneuverability[Anm. 1] eine Antwort auf die neuen infrarotgelenkten Kurzstrecken-Luft-Luft-Raketen, die Ziele aus jedem beliebigen Winkel ausschalten können, und nicht mehr nur von hinten.[1] Der Programmmanager Robinson wies darauf hin, dass das X-31-Projekt eines der wenigen mit reverse technology flow für die Vereinigten Staaten sei, das heißt, dass die Vereinigten Staaten vom Wissen Anderer profitieren würden[3], was bis dato in größerem Umfang nur durch systematische Auswertung der Hochtechnologie des Dritten Reichs (im Projekt Paperclip) zu erheblichem Know-How-Transfer von Deutschland in die USA gelungen war.
| Rockwell-MBB X-31 | |
|---|---|
 | |
| Typ: | Experimentalflugzeug |
| Entwurfsland: | |
| Hersteller: | * Rockwell International |
| Erstflug: | 11. Oktober 1990 |
| Indienststellung: | Flugerprobung 2003 beendet |
| Stückzahl: | 2 |
Die X-31 war das erste X-Flugzeug der Vereinigten Staaten, das in internationaler Kooperation entstand, das erste Kampfflugzeug, dessen Schubvektorsteuerung (SVS) eine Kontrolle der Bewegungen sowohl um Nick- als auch Gierachse ermöglichte und das erste, das ausschließlich mit dem Steuerknüppel geflogen werden konnte. Die quasi seitenleitwerkslosen Testflüge waren bei der Wiederaufnahme eines neuen Erprobungsabschnitts nach der Reaktivierung der X-31 nach vierjähriger Pause (eingelagert in Palmdale/Kalifornien) auch die ersten, in denen ein Flugzeug ohne die stabilisierende Wirkung eines Seitenleitwerks Überschallgeschwindigkeit erreichte. Ferner wurden ein 3D-Audiosystem und eine virtuelle Zieldarstellung durch erweiterte Realität erprobt. Zur gleichen Zeit wurden von der NATO RTO Working Group 27 Meinungsumfragen unter erfahrenen Piloten zu den Themen 3D-Schubvektorsteuerung, 12-g-Flugenveloppe, Helmvisier und negative G-Lasten durchgeführt, um die Nützlichkeit dieser Konzepte bewerten zu können.
Der Rollout fand am 1. März 1990, der Erstflug am 11. Oktober desselben Jahres statt. Es entstanden zwei Flugzeuge, von denen eines während der Versuche abstürzte. Die Amerikaner verwendeten die X-31 nur für allgemeine Versuche, zum Beispiel für Luft-Boden-Angriffe im JAST-Programm, und die US Navy war an den Vorteilen der Schubvektorsteuerung (SVS) bei Landungen auf Flugzeugträgern interessiert. Deutschland und andere Länder, die eine Beteiligung am X-31-Programm anstrebten, wollten dagegen die Schubvektorsteuerung (SVS) in Eurofighter Typhoon bzw. Saab 39 Gripen implementieren und die X-31 als Testflugzeug für Düse und Triebwerk verwenden. So sollte das Triebwerk Eurojet EJ200 mit Schubvektordüse in die X-31 im Rahmen eines deutsch-spanisch-amerikanischen Abkommens eingebaut und geflogen werden; aus verschiedenen Gründen kam dies jedoch nicht zustande.
Geschichte
Das Konzept
MBB und Rockwell arbeiteten bereits seit 1981 an einem gemeinsamen hochagilen Kampfflugzeugentwurf.[4] Nachdem MBB das EAP-Projekt verlassen hatte, einigte man sich 1982 mit Rockwell, das Konzept der Supermanövrierfähigkeit weiter zu verfolgen. MBB hatte bereits mit Saab eine Saab 37 modifiziert, um die Entkopplung von Flugpfad und Rumpfausrichtung zu demonstrieren. MBB legte das Konzept 1983 der Luftwaffe vor, diese entschloss sich aber, es wegen technischer Unreife nicht in das European Fighter Aircraft (EFA) einfließen zu lassen.[5] MBB ermutigte daraufhin Rockwell, die Defense Advanced Research Projects Agency (DARPA) um Gelder zu bitten. Rockwell reichte daraufhin 1983 unaufgefordert Pläne für ein Supernormal Kinetic Enhancement (Snake)-Testflugzeug ein.[2] Ab November 1984 wurden Untersuchungen durchgeführt, ein preisgünstiges Experimentalflugzeug auf Basis dieser Erkenntnisse zu fertigen. Das Flugzeug sollte die Flugsteuerung nach einem Strömungsabriss, an der MBB schon seit Jahren arbeitete, praktisch demonstrieren, um sie später in das EFA zu integrieren.[4] Im November 1984 vergab die DARPA eine Machbarkeitsstudie an Rockwell, welche wiederum MBB als Subunternehmer einband. 1985 initiierten die Senatoren Sam Nunn und Dan Quayle die Nunn-Quayle Nato co-operative Research and Development Initiative, die 1986 vom US-Kongress abgesegnet wurde.[2][5]
Deutschland und die Vereinigten Staaten unterzeichneten daraufhin im Mai 1986 ein Memorandum of Understanding, mit dem die Designphase eingeleitet wurde, die bis zum September 1987 andauerte.[4][5] Im September 1986 vergab die DARPA einen vorläufigen Auftrag über ein Jahr Entwicklungsleistungen. Die Beziehungen glichen sich nun an, da direkt von Regierung zu Regierung verhandelt wurde. Die Auftragsleitung oblag der DARPA, der Leiter kam von der US Navy, sein Stellvertreter vom BMVg. MBB und Rockwell schlossen noch ein Abkommen, das die Arbeitsanteile und Zuständigkeiten regelte:[2] MBB war für die Flugsteuerung und Kontrollgesetze, Schubvektordüse, Lufteinlauf und die CFK-Doppeldeltatragflächen verantwortlich, Rockwell für den Rest.[6] Die US Navy war daran interessiert, wie sich die Landegeschwindigkeit auf Flugzeugträgern reduzieren ließe.[2] Im Februar 1987 wurde die offizielle Bezeichnung X-31 für das Projekt vergeben. Es war das erste X-Flugzeug der Vereinigten Staaten, das in internationaler Kooperation entstand. Die Kosten für den Bau zweier X-Flugzeuge und ihrer Tests wurden mit 75 Mio. US-Dollar beziffert.[4] Der MBB-Anteil von 20 % wurde vom deutschen Staat getragen,[2] Rockwell bekam über die Nunn-Quale-Initiative seine Kosten finanziert. 1987 begannen bereits die Tests mit den Triebwerksauslässen in den Vereinigten Staaten.[4] Im September 1987 wurde das Design festgelegt und die Fabrikation begann.[6]
Ein Jahr später, 1988, hatte das Projekt seine erste Hürde zu überwinden: Der US-Senat störte sich an der 80/20-Aufteilung der Arbeitsanteile und verweigerte die Gelder. Das Pentagon schrieb daraufhin an den Senat einen Brief, in dem darauf hingewiesen wurde, dass die Vereinigten Staaten Deutschland zu einer Teilnahme am Projekt eingeladen hätten und ein Rückzug die Vereinigten Staaten blamieren würde. MBB hatte bereits einen Kompositflügel gefertigt, der andere befand sich gerade in der Herstellung. Der Senat gab schließlich kurz vor dem Ende 47,3 Mio. US-Dollar für die nächsten 22 Monate und die ersten 12 Testflugstunden frei.[3][7]
Anfang 1989 wurde das Datum des Erstfluges auf November/Dezember 1989 gelegt, die zweite Maschine sollte drei Monate später abheben. Es sollten bis Januar 1991 300 Flugstunden in 400 Flügen erfolgen. Die Hälfte der Flüge sollte die konventionelle Flugenveloppe erweitern, die andere Hälfte nach einem Strömungsabriss. Die erste Testserie sollte bei Rockwell in Palmdale, Kalifornien (United States Air Force Plant 42) stattfinden. Die taktische Anwendung sollte in der Naval Air Station Patuxent River demonstriert werden, da hier die Verfolgungsmöglichkeiten der Nellis Air Force Base in der Nähe verfügbar waren. Die amerikanische und deutsche Regierung forderten ein zügiges Voranschreiten des Projektes, um den taktischen Nutzen von Herbst-Manöver und weiteren zu zeigen. Die taktische Evaluation sollte zuerst gegen computergenerierte Ziele durchgeführt werden, dann gegen die andere X-31 ohne aktive Schubvektorsteuerung, dann gegen Aggressorflugzeuge.[7]
Manövertests
Anfang 1989 war die Endmontage der ersten X-31 im Gange.[7] Am 1. März 1990 war der Rollout des ersten Flugzeuges. Ende April sollte der erste Flug erfolgen, und die zweite X-31 sollte im Juni fertig sein. Die Flugsteuerungssoftware war kurz vor der Fertigstellung und wurde in einem Flugsimulator in Kalifornien von MBB- und Rockwell-Testpiloten bei bis zu 70° Anstellwinkel (Angle of Attack, AOA) geprüft.[8] Die Entwicklung lief parallel in Westdeutschland und den Vereinigten Staaten ab, die Daten wurden über Modems ausgetauscht. Durch die exzessive Verwendung bewährter Bauteile konnten die Kosten für den Bau der beiden X-31 auf das Niveau von zwei F-16 gedrückt werden. Um auf Bruchtests an einem Iron Bird verzichten zu können, wurden alle Lasten mit 110 % überdimensioniert, was auch eine schnelle Zertifizierung – Deutschland die Tragflächen und die Schubvektorsteuerung, Rest Vereinigte Staaten – ermöglichte.[5]
Aus nicht näher genannten Sicherheitsüberlegungen verschob sich der Erstflug auf Mitte Juni.[5] Letztlich fand der Erstflug mit Rockwell-Testpilot Ken Dyson am 11. Oktober 1990 statt, fünf Monate hinter dem Zeitplan aufgrund von Feinabstimmungen mit dem Fly-by-Wire-System. Das Testprogramm sollte nun 1992 abgeschlossen sein.[9] Am 23. April 1992 fand nach einem langen Wartungsintervall der Erstflug im Dryden Flight Research Center der NASA statt, nachdem die beiden X-31 dorthin verlegt wurden. Hier sollte die Flugenveloppe erweitert werden, um Anfang 1993 zur NAS Patuxent River verlegt zu werden. Dort sollte mit den Gefechtsübungen begonnen werden.[10] Im Mai 1993 waren die Testflüge nach Strömungsabriss abgeschlossen. Für Dezember waren die ersten Testgefechte gegen konventionelle Kampfflugzeuge geplant.[11]
Im Oktober 1993 wurde bekannt, dass bei Testflügen 1994 das Seitenleitwerk entfernt werden solle, um Luftwiderstand und Radarsignatur zu senken. Grund war auch, dass bei Flügen mit einem Anstellwinkel von über 40° das Seitenleitwerk nutzlos war, und ab 45° auch das Seitenruder. Bevor man das Seitenleitwerk entfernte, wurde zuerst der Effekt eines kleineren Ruders untersucht, indem das Ruder destabilisierend programmiert wurde, und der Effekt durch Schubvektorsteuerung (SVS) kompensiert werden musste. Das Ziel war eine quasi-seitenleitwerkslose Variante, bei der nur die Wurzel des Leitwerkes übrig bleiben sollte. Das Projekt sollte die Nützlichkeit von Schubvektorsteuerung (SVS) im Überschallflug untersuchen. Dazu sollte im Januar 1994 erstmals die Schallmauer durchbrochen werden. Die Kampftests gegen F-18 verliefen bis zu diesem Zeitpunkt vielversprechend, Manöver wie Pitch Reverse, J-Turn und Helicopter Gun Attack wurden evaluiert.[12] Am 17. März 1994 wurde der erste Flug mit dem neutralisierten Seitenleitwerk durchgeführt und dabei Mach 1,2 erreicht. Es war das erste Mal, dass ein Flugzeug ohne die stabilisierende Wirkung eines Seitenleitwerks Überschallgeschwindigkeit erreichte. Als Vorteile wurden Radarsignatur, Luftwiderstand, Kraftstoffverbrauch und Gewicht genannt.[13]
Anfang 1994 arbeitete DASA, die für die Kontrollgesetze des Eurofighter-Flugsteuerungssystems verantwortlich war, daran, Teile der Kontrollgesetze der X-31 in das Eurofighter-Projekt einfließen zu lassen.[14] Deutschland warb dafür, den Eurofighter zur Kampfwertsteigerung später mit Schubvektortechnik auszurüsten. Eurojet Turbo betonte, dass dies keine offizielle Anforderung sei, aber MTU dafür geworben habe. Gleichzeitig wurden weitere quasi-seitenleitwerkslose Flüge angekündigt.[15] Anfang 1995 lehnte das Eurofighter-Konsortium die Entwicklung eines alternativen Flugsteuerungssystems (FCS) auf Basis der X-31 ab. Obwohl es technisch machbar gewesen wäre, erfüllte das gegenwärtige FCS die Bedürfnisse und Anforderungen des Flugzeuges. Es wurde befürchtet, dass eine radikale Änderung zu diesem Zeitpunkt Zeit- und Kostenüberschreitungen verursachen würde.[16]
Zum Jahreswechsel 1994/1995 war das X-31-Programm in finanziellen Schwierigkeiten: Deutschland erklärte sich bereit, 45 Mio. US-Dollar bzw. 50 % der Kosten eines Nachfolgetestprogramms zu tragen, was von den Vereinigten Staaten aber abgelehnt wurde.[16] Dazu kam, dass Testpilot Karl Lang, der sich mit dem Schleudersitz retten konnte, mit seiner X-31 am 19. Januar 1995 abstürzte.[17] Die vorläufige Unfalluntersuchung von Rockwell und DASA vermutete eine Vereisung des Pitotrohres als Ursache. Die Geschwindigkeit wurde falsch angezeigt, dann kam es zu Oszillationen um die Nickachse.[18] Auch das Briefing wurde kritisiert, da Lang vor dem Flug nicht darüber informiert wurde, dass das Pitot-Heizsystem wegen Anpassungen abgezogen worden war.[19]

Unterdessen wurde die zweite Maschine am 23. Mai 1995 in einer Lockheed C-5 Galaxy nach Manching verlegt, um an der Paris Air Show teilnehmen zu können.[19] Die Kosten für den Demoflug teilten sich Deutschland und die Vereinigten Staaten. Das X-31-Team warb um weitere Gelder von der US Navy, da die Schubvektorsteuerung ein Absenken der Landegeschwindigkeit auf 80–90 kts ohne Kontrollverlust ermöglichen würde. Die simulierten Anflüge wurden im quasi-seitenleitwerkslosen Modus erflogen, und Simulationen ließen auf 65–70 kts als mögliche Untergrenze schließen. Die simulierten Trägerlandungen wurden bis zu 30 m über Boden erflogen und wurden mit Mitteln des JAST-Programmes finanziert, weswegen auch die Nützlichkeit von SVS bei Luft-Boden-Angriffen untersucht wurde. Die Vereinigten Staaten versuchten nun, mit der F-16 MATV und F-15 ACTIVE eigene Wege zu gehen.[20]
ESTOL und Eurofighter
Da die X-31 nur die Hälfte ihrer nutzbaren Lebensdauer verbraucht hatte, wurden Finanziers gesucht, um weitere Testflüge durchführen zu können. Mitte 1996 wurde klar, dass Deutschland und Schweden die Schubvektortechnik evaluieren wollten, um quasi-seitenleitwerkslose Varianten ihrer Flugzeuge zu entwickeln.[21] Deutschland wollte die Testflüge nutzen, um die Schubvektortechnik in den Eurofighter zu bekommen und Schweden in die JAS 39. Die US Navy hatte die F-18 im Auge, auch auf eine Anwendung bei der Air Force (F-15/16) wurde spekuliert. Die Drei-Nationen-Gespräche drehten sich um die Implementierung der Schubvektortechnik in Typhoon und Gripen, extreme Kurzstarteigenschaften für Trägerlandungen ohne Fanghaken und für Landungen auf beschädigten Landebahnen mit signifikanter Nutzlast, und die Entwicklung eines fortschrittlichen Luftdatensystems, ohne den Ausleger an der Nase wie bei der X-31 verwenden zu müssen.[22]
Im Oktober 1997 bestätigte Volvo, dass Saab, General Electric, Daimler-Benz Aerospace (DASA) und Boeing Gespräche über das X-31-VECTOR-Programm führten. Dabei sollte auch die AVEN-Schubvektordüse von GE erprobt werden. Volvo trat dafür ein, in die X-31 ein RM-12-Triebwerk mit 80,5 kN Schub einzubauen, das von GE auf Basis der F404 für den Gripen entwickelt worden war. Die Gespräche stockten aber wegen der Finanzierung; vor allem Deutschland hatte wieder einmal mit einer Kürzung des Wehretats zu kämpfen, wollte sich aber an den Kosten beteiligen.[23] Anfang 1998 wurde erwartet, dass die drei Staaten im März ein Memorandum of Understanding über das X-31-VECTOR-Programm unterzeichnen würden. Schubdüse und Luftdatensystem sollten überarbeitet werden. Aloysius Rauen, Chef der Militärsparte von DASA, wollte die Ergebnisse des VECTOR-Programms im Eurofighter EF2000 oder JAS 39 Gripen umgesetzt sehen, um bei der Schubvektorsteuerung mit Russland gleichzuziehen.[24]
Im Juni 1999 unterzeichneten Deutschland und die Vereinigten Staaten das MoU, die Unterzeichnung durch Schweden wurde in Kürze erwartet. Für das Thrust Vectoring Extremely Short Take-off and Landing, Tailless Operations Research (VECTOR)-Projekt wurde die X-31, welche über Jahre im NASA Dryden Flight Test Centre gelagert worden war, zu Boeings Fabrik in Palmdale überführt. Die US-Rolle im Projekt übernahm wieder die US Navy, Boeing hatte in der Zwischenzeit Rockwell gekauft. Saab Aircraft und Volvo Aero waren nun ebenfalls beteiligt.[25] Im September wurden die Vereinigten Staaten und Deutschland langsam ungeduldig, da Schweden sich aufgrund von Kürzungen im Verteidigungsetat nicht zu einer Entscheidung durchringen konnte. Die spanische Firma ITP regte an, stattdessen die Schubvektordüse des EJ200, die kurz zuvor am Boden erprobt worden war, in der X-31 zu testen. Die Vereinigten Staaten und Deutschland entschieden, notfalls ohne Schweden das VECTOR-Programm durchzuführen, mit den bestehenden Petals am Heck. Spanien könnte später einsteigen und die Düse mit dem F404 kombinieren. Die Testflüge sollten im Jahr 2000 starten.[26]
Anfang 2000 wurden die Planungen konkreter: Die US Navy führte mit ITP Gespräche über die Integration der Schubvektordüse in die X-31. Es wurde auch angedacht, dass Spanien Testzeit auf dem Flugzeug mieten könnte oder die Düsentests nach dem VECTOR-Programm durchgeführt werden. Deutschland und die Vereinigten Staaten einigten sich über die Finanzierung der 25 Testmonate des VECTOR-Programmes. Schweden zog sich mangels Finanzierungsmöglichkeiten aus dem Programm zurück.[27] Ende 2000 stand der Abschluss eines Abkommens zwischen den Vereinigten Staaten, Spanien und Deutschland kurz bevor. Es sollte vereinbart werden, ab Ende 2002 die Schubvektordüse des EJ200 in der X-31 testzufliegen. Damit sollten die Eurofighter-Partnerländer ermutigt werden, die Tranche 3 mit Schubvektortriebwerken zu bestellen. ITP hatte die Düse bereits extensiv erprobt, allerdings war kein Eurofighter für Testflüge verfügbar. Die Kosten von etwa 60 Mio. US-Dollar zum Einbau eines EJ200 mit SVS in die X-31 sollten hauptsächlich von der spanischen Regierung getragen werden, der Rest von der Eurojet Turbo GmbH. Die NATO EF 2000 and Tornado Development, Production & Logistics Management Agency stimmte der Lieferung der Triebwerke zu, wobei diese vom spanischen Quantum abgezweigt werden sollten. Die US Navy wäre nur für das Management der Flugtests verantwortlich, allerdings waren die Europäer über den Technologietransfer des EJ200 in die Vereinigten Staaten besorgt. Die Industrie hatte sich zu diesem Zeitpunkt noch nicht auf die genaue Integration der Schubvektortechnik in den Eurofighter geeinigt. Der Projektleiter von ITP, Daniel Ikaza, schlug vor, zuerst nur die Nickkontrolle (2D) im aerodynamischen Flugbereich zu ermöglichen und später durch Software-Updates der Flugsteuerungssoftware 3D-Vektorsteuerung auch nach einem Strömungsabriss zu ermöglichen. Der Direktor der NETMA zeigte sich vom Nutzen der Schubvektortechnik überzeugt und sah eine Integration in den Eurofighter für Tranche 3 und danach. Da die Ruder weniger bewegt werden müssen, könnten die dauerhaften Wenderaten erhöht und die Startstrecke um 25 % reduziert werden.[28]
_approaches_the_ground_at_a_24_degree_angle.jpg.webp)
Unabhängig davon war die X-31 im November 2000 bereit für die VECTOR-Testserie.[28] Am 24. Februar 2001 hob die X-31 nach sechs Jahren Pause wieder ab. Der 40-minütige Testflug von der Patuxent River NAS aus markierte den Beginn der „Wiederaktivierungstests“, die zwei bis drei Monate andauern sollten. Ab November sollten die ESTOL-Flüge auf eine virtuelle Landebahn im Himmel beginnen, bis dann im November 2002 reale ESTOL-Landungen in Patuxent River geplant waren.[29] Aufgrund von Problemen, das Flugzeug nach sechs Jahren wieder ordnungsgemäß in die Luft zu bekommen, kam es zu Verzögerungen und Kostenüberschreitungen. Da die 60 Mio. US-Dollar bereits verbraucht waren, fehlte es für die dritte Phase des VECTOR-Programms an Geld, so dass die Navy im August 2001 nach weiteren Finanztöpfen Ausschau hielt. Währenddessen wurden die „Landungen“ mit 40° Anstellwinkel (AOA) auf dem virtuellen Runway vorbereitet und das neue Luftdatensystem eingebaut. Mit dem spanischen Verteidigungsministerium wurden unterdessen weitere Gespräche über den Einbau des EJ200 mit SVS geführt.
Am 15. April 2003 wurde dann der erste Landeanflug auf den virtuellen Runway 1500 m über der Patuxent River NAS geflogen.[31] Am 29. April wurde der vollautomatische ESTOL-Landeanflug auf die Marinebasis durchgeführt. Mit 24° Anstellwinkel und 121 kts (224 km/h) Landegeschwindigkeit konnte die Landestrecke auf 31 % reduziert werden. Normalerweise musste mit 12° Anstellwinkel und 175 kt angeflogen werden, was 2400 m Landebahn benötigte. So waren nur 520 m nötig, bis das Flugzeug langsam genug war, um einen Kreis auf der Bahn drehen zu können. Das Differential-GPS führte das Flugzeug mit einer Genauigkeit von 2 cm ins Ziel.[32] Dies war zugleich auch der letzte Flug der verbliebenen X-31.
Nachlese

Die X-31 war als einziges internationales Programm in der Reihe der legendären X-Flugzeuge der Vereinigten Staaten im Jahr 2004 noch auf der Internationalen Luftfahrtausstellung (ILA) in Berlin zu sehen. Dazu wurde sie am 22. Juni 2003 an Bord eines amerikanischen Transportflugzeugs nach München überführt. Anschließend wurde ein Ausstellungsplatz in der Flugwerft Schleißheim des Deutschen Museums zugewiesen. Nach fünf Jahren sollte sie in einem amerikanischen Museum gezeigt werden,[33] was aus unbekannten Gründen jedoch nie zustande kam.
DASA beschäftigte sich im Anschluss mit der Integration der Schubvektortechnik in den Eurofighter. Als Vorteile werden genannt: Post-Stall-Manöver zur Erhöhung der Manövrierfähigkeit, Überschalltrimmung und unabhängige A8/A9-Kontrolle[Anm. 2] für höhere Supercruisegeschwindigkeiten, kürzere Start- und Landestrecke, mehr Steuerflächen und bessere Nahkampffähigkeit für geringere Verlustraten. Dazu müssen das fortschrittliche Luftdatensystem und die Schubvektordüse integriert werden, und die Steuergesetze umgeschrieben werden; der Ausfall eines Triebwerks im post-stall-Manöver (PST) soll verkraftet werden. Nebenbei steigt die Wenderate des Eurofighters auch im Anstellwinkelbereich von unter 30° an. Da bei den X-31-Flügen bereits die Lasten am Flugzeugrumpf und -flügel gemessen wurden, können die Laständerungen für den Eurofighter mit PST abgeschätzt werden, und wurden als gering eingestuft. Die benötigen strukturellen Verstärkungen sind ebenfalls gering. Auch wurde festgestellt, dass Effekte nicht-linearer Aerodynamik im PST keine Rolle mehr spielen. Da die SVS das Heckgewicht erhöht, wurde ein Kopfballast vorgeschlagen, um die Balance des instabilen Fluggerätes zu wahren. Das Mehrgewicht könnte durch kleinere Tanks oder eine Reduzierung der Seitenleitwerksgröße um etwa 1/3 kompensiert werden. Im letzten Fall würden Luftwiderstand, Flatterschwingung und Radarsignatur ebenfalls profitieren.[34] Da das E-Scan-Radar etwa 100 kg schwerer als das CAPTOR-M ist, kann vermutlich auf den Kopfballast verzichtet werden.
Technik
Aerodynamik
Sowohl das EFA als auch der ATF waren dafür konzipiert, Gegner bereits im Anflug zu zerstören, bevor diese das eigene Fluggerät orten sollten. Sollte der Kampf nicht im BVR-Gefecht entschieden werden, würden sich beide Seiten mit einer Geschwindigkeit von etwa Mach 2 nähern und versuchen, den Opponenten frontal mit wärmesuchenden LFKs zu beschießen. Sollte dies ebenfalls scheitern, wäre die Bordkanone am Zuge. Ein Distanzgefecht würde so in wenigen Sekunden in einem Dogfight enden. Die neuesten LFKs mit Wärmesucher ermöglichten erstmals, einen Gegner auch frontal zu beschießen. Als Rockwell und MBB ab 1981 Studien über zukünftige Kampfflugzeugtechnologien durchführten stellten sie fest, dass eine signifikante Anzahl an Gefechten, die auf Distanz beginnen, im Nahkampf enden.[2] Die Möglichkeit, WVR-Raketen aus jeder Position auf den Gegner abzufeuern, änderte die Kampftaktiken radikal, und somit auch die Anforderungen an ein Kampfflugzeug. Simulationen zeigten, dass es nun zu einer wechselseitigen Zerstörung kommen könnte, wenn beide Seiten aufeinander feuern. Analysen zeigten, dass dasjenige Flugzeug, welches eine engere Wende fliegen kann, und aus der Kurve heraus mit Helmvisier zuerst auf den Gegner schießen kann, einen Vorteil erzielt. Da der Wenderadius von G-Last und Geschwindigkeit abhängt, wäre eine möglichst langsame Geschwindigkeit nötig, die kontrolliert geflogen werden kann. MBB kam zu dem Schluss, dass ein kurzzeitiges, kontrolliertes Fliegen nach einem Strömungsabriss nötig sei, gefolgt von einem Weiterflug in aerodynamischen Grenzen.[Anm. 1] Über 25.000 bemannte und unbemannte Simulationen wurden von MBB durchgeführt, um Steuerkräfte, Kampfmanöver und eine geeignete aerodynamische Konfiguration zu entwickeln.[5]
Um einen Vorteil gegenüber existierenden Maschinen zu haben, müsste die Manövrierfähigkeit deutlich gesteigert werden. Die X-31A Enhanced Fighter Maneuverability (EFM) sollten die Manöverenveloppe über die bisherigen Grenzen der Aerodynamik, Triebwerkstechnik, Struktur- und Pilotenbelastung hinaus erweitern. Laut Programmmanager Michael Robinson sollten die X-31 die BVR-Fähigkeiten von EFA und ATF mit den Dogfight-Fähigkeiten einer F-86 Sabre verbinden. Konkret nannte Robinson ein Abschussverhältnis von 10:1. Dazu sollte die X-31 in Bereiche der Flugenveloppe vorstoßen, die vorher kein anderes Flugzeug erfliegen konnte, und so einen taktischen Vorteil erzielen. Durch Fliegen mit höherem Anstellwinkel (Anstellwinkel) unterhalb der Cornerspeed[Anm. 3] sollten sehr hohe Wenderaten erzielt werden.[35] Ferner sollte der Pilot das Flugzeug dank Schubvektorsteuerung wie einen Geschützturm ausrichten können.[2] Die X-31 sollte auch das Potential für eine überlegene Manövrierleistung im Überschall bis Mach 1,3 besitzen.[5]

Das Aerodynamikdesign der X-31 basierte auf dem TKF-90,[1] und ist wie die Aerodynamik des Eurofighter Typhoon ein Kompromiss aus niedrigem Widerstand im Überschall, maximalem Auftrieb, minimalem induzierten Widerstand, und einer Balance zwischen Instabilität bei hohen Anstellwinkeln und dem benötigten Pitch-Recovery-Drehmoment bei hohen Anstellwinkeln. Das von MBB entwickelte und von Rockwell optimierte Flügelprofil mit 5 % Dicke und großem Vorderkantenradius sollte die Performance bei hohen Anstellwinkeln (Anstellwinkel) verbessern.[35] Geteilte Vorder- und Hinterkantenklappen wurden wie beim Eurofighter eingebaut. Die Aktuatoren von Garrett[7] für die Hinterkantenklappen befanden sich ebenfalls in „Badewannen“ unter den Flügeln, die der Vorderkanten waren im Flügel versteckt. Die äußeren Klappen arbeiteten auch als Querruder, da die SVS keine Rollmomente erzeugen konnte. Die Entenflügel hatten ein symmetrisches Profil. Kurzfristig war angedacht, aus Kostengründen die Entenflügel des B-1B-Bombers zu verwendet, was wegen des Gewichtes aber nicht realisiert wurde. Die Flügel waren trocken, und aus Aluminium mit CFK-Beplankung. Kraftstofftank und Avionik wurden im Schwerpunkt des Flugzeuges getragen, die Messtechnik in der Nase und ein Trudelschirm im Heck. Der Rumpf zwischen der Cockpithaube und der Tragflächenhinterkante verwendete einen konstanten Querschnitt, um die elf Alu-Spanten, welche mit den vier Längsspanten verbunden waren, mit einer Hydraulikpresse in Massen billig produzieren zu können. Der Heckbereich spitzte sich zu, um den transsonischen Widerstand zu senken. Die Beplankung bestand vorne aus CFK-Platten aus dem B-1B-Programm, ebenso am Seitenleitwerk, am Rumpf aber aus Metallblechen. Das Seitenruder bestand aus CFK mit Wabenkern. Der Mittelrumpf wurde aus Titanspanten gefertigt und mit Titanblechen beplankt, da niemand wusste, wie die Wärmelasten für den Rumpf bei der Benutzung der Schubvektordüse sein würden. Der Lufteinlauf stammte aus MBB-Experimenten, konnte durch seine bewegliche Unterlippe bei hohen Anstellwinkeln den Luftstrom turbulenzarm umlenken und bei hohem Tempo den Überlaufwiderstand reduzieren.[5][6] Die Luft über dem Grenzschichtabscheider wurde durch Wärmetauscher geführt, um Öl und Kraftstoff zu kühlen.[5] Die Strakes zwischen Tragflächenhinterkante und Düse sollten helfen, die Nase von hohen Anstellwinkeln wieder herunter zu bekommen.[36]

Um Kosten zu reduzieren, war die X-31 zwar überschallfähig, konnte aber nur transsonische Geschwindigkeiten erreichen. Das Triebwerk F404 wurde mit drei Petals ausgerüstet, die den Schubstrahl um 10° in der Vertikalen und/oder Horizontalen auslenken konnten. Laut Vertrag sollten die Flugzeuge so billig wie möglich sein.[35][2] 43 % des Leergewichtes einer X-31 stammten von F-16- und F-18-Kampfflugzeugen. Die Schubvektorpetals wurden ursprünglich für einen Versuch mit der F-14 Tomcat entwickelt und bestanden aus kohlenstofffaserverstärktem Kohlenstoff. Es wurden auch metallische Petals mit der F-18 getestet, diese waren aber zu schwer und hätten den Schwerpunkt zu weit nach hinten verlagert. Laut Studien waren 10 bis 15° Schubwinkel bei vollem Nachbrenner nötig, um die Anforderungen zu erfüllen. Die Petals erreichten 10°, was etwa 17 % des Triebwerksschubes entsprach. Im aerodynamischen Flug konnten die spreizenden Petals auch als Luftbremse verwendet werden. Serienmaschinen würden eine „saubere“ Düse verwenden, für die X-31 wäre das aber zu teuer und zeitaufwändig geworden.[5] Das Landefahrwerk wurde von Menasco von einer Cessna Citation III,[7] die Haupträder von einer A-7 und das Frontrad von einer F-16 übernommen. Cockpit, Schleudersitz, Aktuatoren und Displays wurden von der F-18 übernommen, Kraftstoffpumpen, Vorderkantenaktuatoren und Ruderpedale von der F-16. Andere Teile wurden von F-5, F-20, V-22 und T-2C übernommen. Die Tragflächen waren von MBB nach metrischen Maßen gefertigt worden, während Rockwell das imperiale System verwendet hatte.[5]
Flugkontrollrechner
Die Flugkontrollgesetze wurden von MBB geschrieben,[5] und waren nach Ansicht des Programmmanagers Michael Robinson die kritischste Komponente des gesamten Flugzeuges.[2] Die Flugkontrollrechner (FCC) wurden von Honeywell zugeliefert.[7] Bei der Entwicklung griff MBB auf die Erfahrung mit der F-104 CCV zurück.[37]

Die X-31 war das erste Kampfflugzeug, dessen Schubvektorsteuerung (SVS) eine Kontrolle um die Nick- und Gierachse ermöglichte und das erste, das ausschließlich mit dem Steuerknüppel geflogen werden konnte. Die Ruderpedale wurden nur für den bewussten Seitengleitflug und Seitenwindlandungen benötigt. Die Nickkontrolle ging hauptsächlich von den Hinterkantenklappen aus und wurde durch die Canards ergänzt. Die Vorderkantenklappen wurden nach dem Anstellwinkel und der Machzahl eingestellt.[5] Um den Trimmwiderstand im Überschall zu senken,[1][8] wurde die X-31 mit 5 % der Mittleren Aerodynamischen Flügeltiefe (MAC) bei Mach 0,2 moderat instabil ausgelegt. Die Kontrollgesetze waren von MBB in 25.000 Simulationen entwickelt worden, als das Projekt noch bei MBB geführt wurde. Sie wurden in ein dreifach redundantes Computersystem implementiert, wobei ein vierter Rechner als (O-Ton) „Tie-Breaker“ verwendet wurde und für weitere Redundanz sorgte. Die Flugsteuerung besaß noch einen Modus, in dem die Nase des Flugzeuges von der Flugrichtung entkoppelt werden konnte: Der Pilot konnte hier die Nase der Maschine in die gewünschte Richtung ziehen, während die Änderung in Nick- und Gierachse nur ungünstig auf die Trajektorie umgesetzt wurde.[5]
Die Entenflügel rotierten bei hohen Anstellwinkeln abwärts, um das Flugzeug weiterhin kontrolliert steuern zu können. Sie wurden eher auf Pitch-Recovery ausgelegt statt als Auftriebshilfe.[1][8] Das Manövrieren nach einem Luftströmungsabriss (Post-Stall Technology, PST) war bis 70° Anstellwinkel freigegeben, in einem Höhenbereich von 10 bis 30 kft, wenn maximal 4 g und 225 kcas Anfangsgeschwindigkeit nicht überschritten wurden. Für die Kontrollgesetze wurde ein linearisiertes Modell für die Bewegung um die drei Achsen mit Feedback-Schleife für Stabilität und Handling implementiert. Die Flugsteuerung konnte über Gewichtungsmatrizen angepasst werden. Die Vorsteuerung wurde unabhängig vom Feedbackpfad mittels Gleichungen für statische Bewegungen, d. h. unter der Annahme konstanter Piloteneingaben, berechnet. Aufgrund von Komplexität, mangelnder Rechenleistung und Modellschwächen waren diese Gleichungen vereinfacht. Die Position von Canard und Hinterkantenklappen wurde im Levelflug vom FCC aus Trimmtabellen abgelesen. Über weitere Berechnungspfade wurde bei geringen Anstellwinkeln der Luftwiderstand reduziert, und bei hohen Anstellwinkeln die Stabilität verbessert. Da diese „Cruise-Trimmplanung“ aber zu hohen Landegeschwindigkeiten geführt hätte, wurde noch eine weitere Trimmtabelle für maximalen Auftrieb zur Landung implementiert, die vom Piloten per Schalter aktiviert werden konnte. Die geforderte Nickrate wurde in Echtzeit für Canard, Hinterkante und den vertikalen Schubvektor errechnet.[38]
Mittels Steuerknüppel wurden Anstellwinkel und G-Last kommandiert:[1] Bei geringen statischen Drücken nach Anstellwinkel, allerdings nichtlinear, da 2/3 des Spiels 30° Anstellwinkel, und Vollausschlag 70° bedeuteten. Wenn die PST abgeschaltet war, konnten maximal 30° Anstellwinkel erreicht werden. Bei 2/3 der Wegstrecke des Steuerknüppels lag eine Force-Feedback-Grenze, um dem Pilot zu zeigen, ob er im Strömungsabriss war. Bei höheren dynamischen Drücken wurde nach G-Last kommandiert; bei 2/3 der Strecke lag das Lastlimit von 7,2 g an, und änderte sich auch nach der Force-Feedback-Grenze nicht. Der Wechsel zwischen Anstellwinkel und G-Kommandos erfolgte bei etwa 2620 kPa dynamischem Druck. Das Flugzeug konnte nur überziehen, wenn im Anstellwinkel-Modus gesteuert wurde.[38]
Die maximale Rollrate lag bei 240°/s. Durch die Ruderpedale konnten maximal 12° Schiebewinkel gefordert werden. Die Rolle um die Längsachse wurde vom Flugkontrollrechner (FCC) automatisch gegen Gieren stabilisiert, und bei maximaler Rollrate wurden die Gierkommandos auf Null gesetzt.[38][1] Bei hohen Anstellwinkeln wurde die Giersteuerung von der SVS wahrgenommen. Nur ein SV-Petal konnte mit maximal 26° in den Schubstrahl gestellt werden (max. 16° Ablenkung des Schubstrahles),[39] das FCC las auch hier Tabellenwerte abhängig von Schubkraft und Steuerkommandos aus. Sollte die SVS ausfallen, konnte der FCC in einem Übergangs-Modus durch aerodynamische Steuerflächen die Maschine zurück in den aerodynamisch steuerbaren Bereich bringen, selbst in der Nickachse. Nur um die Gierachse gab es dann keine ausreichende Kontrolle mehr, weswegen Seitenruder- und asymmetrische Klappenkommandos in diesem Fall deaktiviert waren. Im Unterschall wurde Carefree Handling[1] demonstriert, allerdings wurden keine Tailslides geflogen. Während der Flugtests traten keine Probleme auf, nur bei Anstellwinkeln über 30° (besonders um 50°) wich das Verhalten bezüglich Rollrate und Schiebewinkel stark von der Vorhersage ab, weswegen eine Feedbackschleife integriert wurde. Zwei Updates – kurz vor dem ersten Testflug und danach – zeigten die Flexibilität der Kontrollgesetze (oder Software): Die Feedbackschleifen wurden in weniger als einem Monat neu konzipiert.[38]
Cockpit und Helmvisier

Das Cockpit wurde von der F/A-18 übernommen, inklusive des Schleudersitzes SJU-5.[39] Die Avionik-Software wurde in JOVIAL geschrieben, nicht wie bei Verteidigungsprojekten üblich in Ada.[5] Um eine Desorientierung des Piloten beim Flug mit hohen Anstellwinkeln zu vermeiden und sein Situationsbewusstsein zu verbessern, wurden verschiedene Hilfen erprobt. Dazu wurde das Head-Mounted Display um ein 3D-Audiosystem ergänzt und das Endprodukt als Helmet Mounted Visual & Audio Display (HMVAD) bezeichnet. Die Tests begannen ab Februar 1993. Dazu wurde erst der GEC-I-NIGHTS-Helm mit integrierten Restlichtverstärkern für Nachtsicht erprobt. Da das Gewicht inakzeptabel war und die X-31 nie nachts flogen, wurden die Restlichtverstärker entfernt. Die Helme wurden in Simulatoren genutzt und bei Akklimatisierungsflügen in T-38 getragen. Weil sich das Testprogramm des Flugzeuges nach hinten schob, bot GEC im September 1993 den neuen Viper-Helm an. Da der Helm etwa ein Kilogramm leichter war, wurde er als neues HMVAD akzeptiert. Das 3D-Audiosystem, vom Armstrong Laboratory der USAF entwickelt, machte den Einbau spezieller Kopfhörer nötig. Das System, das per Audiosignal Flugpfad und/oder Anstellwinkel anzeigen konnte, wurde vorher auf einer AV-8B und OV-10 erprobt.[40]
Da von der Auftragserteilung bis zum Flugtest nur sechs Monate vergingen, war keine Zeit, HMD-Symbole zu entwickeln. Anfang 1993 wurde beraten und GEC 60 Tage eingeräumt, Symbologie zu programmieren. Parallel dazu bewerteten Testpiloten im Simulator die Anzeigen, um schnellstmöglich Verbesserungen einfließen zu lassen. Neben den normalen HMD-Anzeigen wurden auch zwei neue erprobt, welche die Orientierung beim Flug mit hohem Anstellwinkel verbessern sollten: Arc Segmented Altitude Reference (ASAR) von DASA und das Theta-Referenzsystem der USAF. Beim ASAR wurde eine Art „U“ im unteren Sichtbereich eingeblendet. Deckt das „U“ einen Halbkreis ab, ist der Nickwinkel null, bei weniger positiv, bei mehr negativ. Marker an den Enden zeigten den Horizont an. Das Theta-Referenzsystem blendet einen Mini-Globus im unteren Sichtfeld ein, dessen untere Hemisphäre gestrichelte Längengrade aufweist, während die obere Hemisphäre durchgezogene Linien besaß. Durch das Bewegen des Mini-Globus konnte die Orientierung des Fluggerätes relativ zur Erde abgelesen werden, mit N/E/S/W-Einblendungen auf den Achsen. Zusätzlich wurde in der Mitte des Sichtfeldes noch ein weiterer Anstellwinkel-Indikator angezeigt: Zwei Dreiecke mit gleicher Basis, deren Spitzen mit zunehmendem Anstellwinkel nach oben fuhren. Zwischen 0° und 30° Anstellwinkel lagen die Dreiecke aufeinander, bei über 30° Anstellwinkel blieb das untere bei 30° stehen, während sich das andere Dreieck weiter nach oben zuspitzte. Um auch bei extremen Anstellwinkeln zu wissen, in welcher Richtung ein spezielles Ziel lag, wurde im oberen Sichtfeld ein Kreis eingeblendet, mit „N“ für Nord und einer Lücke für die momentane Blickrichtung des Piloten. Während der Flugtests wurde auch der Zielkreis für die Helmvisierung modifiziert. Der Zielkreis wurde dann gestrichelt, wenn das Ziel außerhalb der ±30° Startenveloppe des simulierten Flugkörpers lag.[40]
Während der Flugtests ergab das Feedback der Piloten folgendes Bild: Die Einblendung der relativen Flughöhe und der Kompassrichtung im Luftkampf war überflüssig, da die gegnerische Maschine als Referenz ausreichte. Das ASAR war zu ungenau, das Theta-Referenzsystem wurde für gut und einfach befunden. Geschwindigkeit, Flughöhe und Anstellwinkel sollten immer eingeblendet werden. Beim Anstellwinkel reichte die Einteilung in 30/50/70° aus. Vertikalgeschwindigkeit und spezifischer Leistungsüberschuss wurden ebenfalls eingeblendet und für überflüssig befunden.[40]
Die taktische Evaluierung der X-31 erfolgte nicht nur durch Flüge gegen reale Maschinen. Zusätzlich wurde von DASA auch daran gearbeitet, durch erweiterte Realität einen virtuellen Gegner für den Luftkampf in das HMVAD einzublenden. Damit sollte gegenüber realen Flugzeugen Kosten gespart werden, gleichzeitig würde kein Kollisionsrisiko im Nahkampf bestehen. Ferner kann damit auch der Luftnahkampf gegen Maschinen geübt werden, die der eigenen Seite nicht zur Verfügung stehen.[41]
Entsprechend den Realitäten im Luftkampf sollte die Maschine in bis zu 3000 m (6000 m mit Anzeige) sichtbar und in bis zu 4000 m ihre Lage im Raum erkennbar sein. Aufgrund der beschränkten Rechenleistung sollte das „gegnerische Kampfflugzeug“ aus so wenig Vektoren wie möglich bestehen, und so sah die Gitterstruktur aus wie eine MBB Lampyridae ohne Lufteinlauf. Unterhalb von 60–80 m konnte der virtuelle Leuchtkäfer auf dem HMD nicht mehr dargestellt werden, da die Texturen nicht ausreichten, um strukturelle Details zu erkennen. Aufgrund der beschränkten Rechenleistung war – eben aufgrund der Texturarmut – ein Schätzen der Annäherungsrate bei unter 200 m schwierig. Um den Spielspaß zu erhöhen, wurde das virtuelle Kampfflugzeug von einem Target Maneuver Generator bewegt. Auf Basis der Bewegungen des eigenen Flugzeuges und unter Berücksichtigung der Flugmechanik und Performance des virtuellen Gegners führte das eingeblendete Fluggerät taktische Manöver(sequenzen) aus, wie sie auch von einem echten Gegner erwartet würden. Wählbar waren vorgefertigte Manöver (Kurshalten, Wende mit konstantem Radius usw.), Luftkampfmanöver aus offensiver oder defensiver Position und Nahkampfmanöver. Der Target Maneuver Generator lenkte den virtuellen Opponenten und wählte dessen Schub und Feuerkommandos. Die Einblendung, welche in sechs Freiheitsgraden steuerbar war, wurde 20-mal in der Sekunde aktualisiert. Das Prinzip erwies sich als tauglich und wurde von den Piloten als Trainingstool angenommen.[41]
Triebwerke

Als Strahltriebwerk für die X-31 Enhanced Fighter Maneuverability wurden drei GE F404 modifiziert.[7] Das General Electric F404 wurde gewählt, weil es relativ unempfindlich gegen Turbulenzen ist, die gewöhnlich bei hohen Anstellwinkeln auftreten. Durch den Lufteinlauf der X-31 konnte das Triebwerk auch bei extrem hohen Anstellwinkeln noch volle Leistung liefern. Zu Beginn der Testflüge wurden 18 Flüge durchgeführt, um die Flugtüchtigkeit der Kombination von X-31-Flugzeugzelle und F404-Triebwerk zu überprüfen. Insgesamt wurden 80 Flüge zur Validierung der Flugenveloppe durchgeführt.[5]
Vor dem Beginn der VECTOR (Vectoring, Extremely Short Takeoff and Landing, Control and Tailless Operation Research) Testflüge wurde noch geprüft, ob sich das RM-12 der Saab 39 Gripen in die X-31 verbauen ließe. Das RM-12 ist eine Variante des General Electric F404. Dieser Versuch, als Teil der Phase 1, um die X-31 wieder in die Luft zu bekommen, war erfolgreich: Das Triebwerk passte in den Rumpf. Der nächste Schritt, das Triebwerk mit der Schubvektordüse AVEN (Axisymmetric Vectoring Exhaust Nozzle) auszurüsten,[42] scheiterte jedoch am Geldmangel Schwedens.
Der Einbau der Eurojet-Schubvektordüse in das GE F404 durch die spanische Firma ITP wurde ebenso verworfen.[26] Ende 2000 sollte vereinbart werden, das Eurojet EJ200 mit Schubvektordüse in die X-31 im Rahmen eines deutsch-spanisch-amerikanischen Abkommens einzubauen und testzufliegen. Die Kosten von etwa 60 Mio. US-Dollar zum Einbau eines EJ200 mit SVS in die X-31 sollten hauptsächlich von der spanischen Regierung getragen werden, der Rest von der Eurojet Turbo GmbH. Allerdings wäre die US Navy für das Management der Flugtests verantwortlich, und die Europäer waren über den Technologietransfer des EJ200 in die Vereinigten Staaten besorgt. So wurde auch dieses Vorhaben nicht umgesetzt.[28] Letztlich flog die X-31 stets mit dem General Electric F404, dem die Schubdüse entfernt worden war. Stattdessen wurden drei CFC-Petal an das Flugzeugheck montiert, die den Abgasstrahl umlenkten. Der Bewegungsbereich der Petals nach innen und außen lag bei +35°/−60°.[39]
Testprogramm
In Simulatorflügen wurde ermittelt, dass das Abschussverhältnis durch Supermanövrierfähigkeit um mindestens den Faktor 2 erhöht werden könne, auch bei zahlenmäßiger Unterlegenheit der eigenen Kräfte.[5] Die Simulationen wurden 1979 von der IABG durchgeführt. Dabei wurde der Entwurf des LVJ-90 / Jäger-90 / Prälo-Eurofighters mit und ohne Schubvektorsteuerung (SVS) verglichen. In 125 Simulationsläufen wurde der Dogfight nur mit Kanone simuliert, in 331 der Kampf mit Kanone und Kurzstrecken-Luft-Luft-Lenkwaffe (SRM). Im Luftkampf nur mit Bordkanone konnte die Schubvektormaschine häufiger als erste schießen (2,5:1), schneller in Schussposition kommen (10:1) und ein Abschussverhältnis von 4,2:1 erzielen. Mit Zuhilfenahme von SRM konnte die Schubvektormaschine häufiger als erste schießen (2:1), schneller in Schussposition kommen (2:1 LFK, 8:1 BK) und ein Abschussverhältnis von 5,4:1 erzielen.[37]
_with_F-18_(left).jpg.webp)
Während der gestellten Luftkämpfe über der NAS Patuxent River zwischen dem Oktober 1991 und 1995 wurden von IABG zwischen dem Oktober 1991 und April 1993 weitere Computersimulationen bezüglich Testaufbau und -erwartungen durchgeführt. Nachdem die Piloten mit dem Fliegen mit post-stall technology (PST) vertraut waren, wurden ungeskriptete Kampfmanöver gegen andere Maschinen geflogen. Dabei wurde auch der Testaufbau verändert, indem zum Beispiel der Anstellwinkel der X-31 auf maximal 45° begrenzt wurde oder die Maximalgeschwindigkeit für PST auf 265 kts gesetzt wurde. Auch wurden verschiedene Flugkörper-Enveloppen angenommen, beispielsweise eine Beschränkung beim Schuss aus hohen Anstellwinkeln oder der Einsatz des Helmvisiers. Die „Gegner“ waren F-14B/D und F-18C vom VX-4, sowie F-15C und F-16B 52 vom 422 TES. Die Ergebnisse unterliegen zum Teil der Geheimhaltung.[1]
Veröffentlicht wurde, dass 70° Anstellwinkel bessere Resultate erzielten als 45° Anstellwinkel. Wurde PST deaktiviert, verlor die X-31 meist gegen die degradierte F-18C, welche ähnliche Leistungen vollbringen sollte (15 % gewonnen, 46 % verloren, 39 % unentschieden). Mit PST dominierte die X-31 das Gefecht gegen die F-18C von neutraler Startposition aus deutlich (91 % gewonnen, 3 % verloren, 6 % unentschieden).[1] Das Abschussverhältnis lag bei etwa 1:2 zugunsten der F-18, wenn die X-31 auf SVS verzichtete, und bei 8:1 zugunsten der X-31, wenn diese PST nutzte.[37] Begann die Startposition im langsamen Parallelflug, konnte die X-31 über alle ihre Gegner eindeutig dominieren, es wurden Abschussverhältnisse von über 100:1 erzielt. Begann das Gefecht im schnellen Parallelflug, waren es noch 16,6:1. Bei der Auswertung der Daten wurde festgestellt, dass die X-31-Piloten ihre Gegner meist aus der 2-Uhr- bis 5-Uhr-Position (bzw. spiegelverkehrt) mit der Bordkanone „abgeschossen“ hatten. Die Schussentfernung war bis zu 3000 ft, wobei erst unter 2000 ft gehäuft getroffen wurde. Im Gefecht mit Kurzstrecken-Luft-Luft-Lenkwaffen (SRM) wurde der simulierte Flugkörper meist abgefeuert, wenn der Gegner seine 1-Uhr- bis 5-Uhr-Position (bzw. spiegelverkehrt) der X-31 zeigte. Die weitesten Schüsse auf 10.000 ft wurden im Bereich von 1–2 Uhr abgedrückt, von 2–5 Uhr aus weniger als 4000 ft. Um den SRM-Schuss zu vermeiden, war der Gegner gezwungen, näher als 2000 ft an die X-31 zu kommen, wo er der PST zum Opfer fiel. Auf Distanz konnte die X-31 mit der SRM aus hohen Anstellwinkeln heraus schießen, bevor der Gegner in minimale Reichweite kam.[1] Aus den Daten folgerte Rockwell, dass alle zukünftigen Dogfighter über Schubvektorsteuerung verfügen würden.[20]

Am 17. März 2004 wurde erstmals ein Flug „ohne Seitenleitwerk“ durchgeführt. Als Vorteile wurden Radarsignatur, Luftwiderstand, Kraftstoffverbrauch und Gewicht genannt.[13] Die Testflüge wurden für das JAST-Programm durchgeführt und sollten zur Evaluierung der Steuerbarkeit der Konfiguration für präzise Luft-Boden-Einsätze dienen. Die Flugsteuerungssoftware wurde von der DASA (genauer gesagt Hermann Beh und Georg Hofinger) konzipiert und erweiterte den Einsatzbereich der SVS auch auf Start, Landung und Bodenangriffe. Die X-31 mit Seitenleitwerk wurde bereits bei über 25° Anstellwinkel um die Hochachse instabil, so dass letztlich nur dieser Effekt verstärkt werden musste. Dazu wurde die stabilisierende Wirkung des Seitenleitwerks abgeschaltet und eine destabilisierende Feedback-Schleife eingebaut, welche die (Quer)ruder ansteuerte. Die Stabilisierung oblag dann der SVS. Das Ausmaß an Destabilisierung konnte dynamisch während des Fluges vom Piloten an einem Panel gewählt werden, die Software war flexibel. Von 30 % bis 80 % seitenleitwerkslos konnten die Flugkontrollrechner in 10-%-Schritten alles simulieren. Anschließend wurde der untere Bereich der SV-Enveloppe von mindestens 14.000 ft auf 2200 ft MSL abgesenkt. Aufgrund von schlechten Handling-Qualitäten mussten die Aktuatoren der Schubvektorpetals ausgewechselt werden. Nach der Enveloppe-Expansion wurden Lande- und Marschflüge erprobt. Dabei wurde festgestellt, dass die destabilisierende Wirkung von Klappen und Fahrwerk synergistisch war, das heißt die Störwirkung war größer als die Summe der Einzeleffekte. Flugmanöver verliefen problemlos. Simulierte Landeanflüge auf einen „Flugzeugträger“ wurden ebenfalls erprobt. Aufgrund der hohen Landegeschwindigkeit der X-31 war allerdings ein Anstellwinkel von 12–13° nötig, was die Sicht aus dem Cockpit inakzeptabel verschlechterte. Da eine Erhöhung des Luftwiderstandes der X-31 nicht in Frage kam (wegen Stabilitätsfragen usw.), wurde das Anflugprofil geändert. Bei den folgenden Luft-Boden-Tests wurden Sturzkampfflugzeug-Angriffe mit 45° Sinkwinkel gegen simulierte MANPADS und mobile FlaRak geflogen. Ziel war es, Angriffe außerhalb des Vernichtungsbereiches der Bedrohungen zu fliegen und die Ziele präzise im HUD zu halten. Dazu wurde aus 18.000 ft und 250 KCAS mit dem Sturzflug begonnen, in 12.000 ft bei 400 KCAS die simulierte Waffe ausgeklinkt, und in einem 4- bis 4,5-g-Manöver in den Steigflug gezogen. Die zweite Übung bestand aus einem 15°-Sinkflug mit simuliertem Beschuss von Bodenzielen mit der Bordkanone. Das Zielgebiet wurde durch ein Lichtfeld dargestellt, in dem pro Angriff fünf bis sieben Ziele abwechselnd aufleuchteten. Durch die schnellen Zielwechsel waren die Piloten (Kim, Luftwaffe und Loria, USMC) gezwungen, aggressiv mit Pedalen und Knüppel zu arbeiten. Die dritte Übung war ein Pop-up-Angriff aus dem Tiefflug heraus. Von 1000 ft und 400 KCAS wurde in den Steigflug gezogen, entlastet und in 2500 ft Höhe eine 4-g-Rolle auf das Ziel geflogen, um dieses in das HUD zu bringen. Das Flugzeug wurde dann entlastet, 15 Sekunden im Levelflug gehalten, und dann der Waffeneinsatz in 1500 ft bei 400 KCAS simuliert. Anschließend wurde mit 4,5 g in den Steigflug gezogen. Das Flugzeug erfüllte alle Luft-Boden-Tests nur adäquat, vor allem die schlechte Rollrate wurde bemängelt. In der Analyse wurde festgestellt, dass die Limits des FCS auf die lateralen Bewegungen des Steuerknüppels unnötig hoch waren. Nach einer Überarbeitung der Kontrollgesetze und der flexibleren Wahl des Triebwerksschubs wurden Simulationen durchgeführt, die bessere Ergebnisse zeigten. Vorher wurden weniger als 50 % der Triebwerksschubmarge genutzt, nun konnte mit vollem Nachbrenner manövriert werden. Die später durchgeführten Testflüge fielen entsprechend positiv aus. Die meisten Manöver wurden mit 50–60 % Seitenleitwerkslosigkeit geflogen. Beim Pop-up waren trotzdem stellenweise nur 33 % des Schubvektors zur Bahnänderung verfügbar, der Rest wurde vom Rechner zur Stabilisierung benötigt. Als Fazit der Testserie wurde geschlossen, dass Jagdbomber ohne Seitenleitwerk möglich seien. Es wurde angeregt, ein seitenleitwerksloses Fluggerät zu bauen, um die Vorteile (Radarsignatur, Luftwiderstand, Gewicht) besser nutzen zu können. Dies führte zur McDonnell Douglas X-36. Um Redundanz und Schadenstoleranz zu steigern und um asymmetrische Außenlasten besser ausgleichen zu können, wurden zweistrahlige Flugzeuge empfohlen.[39]

Nach sechs Jahren Pause hob die X-31 Anfang 2001 wieder für die VECTOR-(Vectoring, Extremely Short Takeoff and Landing, Control and Tailless Operation Research)-Testflüge ab. Das VECTOR-Programm sollte in etwa 60 Testflügen eine Reduzierung der Landegeschwindigkeit um mindestens 40 % demonstrieren (Extremely Short Take-Off and Landing, ESTOL). Ferner sollten weiter Daten über seitenleitwerkslose Konfigurationen gesammelt werden. Ein Differential-GPS von IntegriNautics und das neue Luftdatensystem von DASA, das aus elf konzentrischen Löchern in der Nase bestand, wurden eingebaut.[43] Zuerst wurden Testflüge zur Validierung des Luftdatensystems geflogen, und dabei Mach 1,18 und 70° Anstellwinkel erreicht. Wegen des Systems, das mit Löchern und Druckunterschieden arbeitete, konnte auf die Daten des Auslegers verzichtet werden, der an der Nase montiert war.[31] Dann begannen die ESTOL-Tests: Um die Landestrecke zu reduzieren, sollten die Anflüge auf die Bahn mit bis zu 40° Anstellwinkel erfolgen, um die Landegeschwindigkeit um 40–50 % zu reduzieren, auf etwa 90 kts (170 km/h). Die ESTOL-Landeanflüge wurden automatisch vom Flugkontrollrechner geflogen. Der Pilot flog das Flugzeug nur in eine Startbox, aktivierte den Landemodus und nahm die Hände von den Steuereingaben. Die Maschine flog dann auf dem Schubstrahl stehend, durch SVS kontrolliert, mit 40° Anstellwinkel auf die Bahn zu und kippte 2 ft über dem Boden, kurz vor dem Aufsetzen nach vorne.[29][31] Dabei wurden mehrere Testlandungen durchgeführt. Von 12° Anstellwinkel wurden in 2°-Schritten (die teilweise auch übersprungen wurden), schließlich 40° Anstellwinkel im Landeanflug erreicht. Die Grenze von 40° Anstellwinkel wurde aus Redundanzgründen bei der X-31 gesetzt, von der Steuerbarkeit her wären höhere Anstellwinkel möglich gewesen. Die Belastungen für das Fahrwerk beim Aufschlagen bewegten sich im grünen Bereich. Das Flugzeug hatte eine Kamera in der Nase, sodass der Pilot die Flugbahn auf den Displays verfolgen konnte. In einer Serienmaschine sollte das Bild in das HMD projiziert werden.[44] Die US Navy war dabei an einer Erhöhung des Landegewichts von Trägerflugzeugen interessiert.[29]
Technische Daten
| Kenngröße | Daten |
|---|---|
| Besatzung | 1 |
| g-Limits | 7,2 g1 |
| Länge | 13,2 m |
| Spannweite | 7,3 m |
| Höhe | 4,4 m |
| Flügelfläche | 21 m² |
| Flügelstreckung | 2,5 |
| Leermasse | 5443 kg |
| max. Startmasse | 7303 kg2 |
| Tragflächenbelastung |
|
| Triebwerk | 1 × GE F404-GE-400 |
| Schubkraft |
|
| Höchstgeschwindigkeit | Mach 1,3 |
| Schub-Gewicht-Verhältnis |
|
Weblinks
Anhang
Anmerkungen
- Die moderne Demonstration von „Supermanövrierfähigkeit“ besteht meist darin, bei Flugschauen in den Strömungsabriss zu ziehen, um möglichst spektakuläre Drehungen zu vollführen. Der Geschwindigkeitsverlust ist dabei sehr hoch. Mit der ursprünglichen Idee von Wolfgang Herbst bzw. Messerschmitt-Bölkow-Blohm (MBB) hat das wenig zu tun. Herbst postulierte damals folgende Manöver-Charakteristiken: 1) 5 Sekunden PST-Dauer im Durchschnitt, 2) 10 % der gesamten Nahkampfzeit im PST, 3) geringe G-Lasten von etwa 1 g, 4) geringere Manövergeschwindigkeiten von etwa 0,1 Mach (W. Herbst: Supermaneuverability. 1983, Messerschmitt-Bolkow-Blohm; sowie Introduction der RTO HFM Lecture Series Human Consequences of Agile Aircraft. 2001). Die PST-Manöver sollten also nur für Transienten eingesetzt werden, beispielsweise um statt einer langsamen Wende die Nase aufzurichten, um eine noch engere Kurve zu fliegen (Herbst-Manöver). Der Gedanke, eine 20-Tonnen-Maschine in den Strömungsabriss zu wuchten, und sie dann durch ihre Massenträgheit weiterfliegen zu lassen, war ihm völlig fremd.
- A8 = Düsenhalsfläche, A9 = Düsenaustrittsfläche
- Die minimale Wendegeschwindigkeit bei maximalem Lastvielfachen. Hier wird die höchste Wenderate erzielt.
Meinungsumfragen
- Im Zeitraum von April 1997 bis Oktober 1998 führte die NATO RTO Working Group 27 zwei Meinungsumfragen unter Kampfflugzeugpiloten durch. Die erste Umfrage „Operational Need“ beschäftigte sich mit der Frage, welche Nützlichkeit die Piloten bestimmten Fähigkeiten eines agilen Kampfflugzeuges zuschreiben würden. Beteiligt waren 23 US-Piloten (5 NASA, 13 USAF Air Warfare Center, 5 USAF), 11 der schwedischen Luftwaffe, 3 der Bundesluftwaffe und 2 Franzosen. Die Flugerfahrung betrug 900 bis 9000 und durchschnittlich 2589 Stunden. Die Piloten repräsentierten die Crème de la Crème der Piloten mit Flugerfahrung von X-31, F-18 HARV, F-15 ACTIVE, F-16 MATV, Harrier, F-22 Raptor, F-18, MiG-29, Rafale, Gripen und Typhoon. Bewertet werden sollte nach einer offenen Diskussion in einem anonymen Fragebogen die Nützlichkeit von 12-g-Flugenveloppe, Helmvisier, negativen G-Lasten und des Fluges mit hohen Anstellwinkeln/Schubvektortechnik, sowie die Performance zweier amerikanischer Anti-G-Anzüge auf einer Skala von 1 bis 7.[45]
- Die Piloten bewerteten die Nützlichkeit des Helmvisiers am höchsten, gefolgt vom Flug mit hohen Anstellwinkeln/3D-Schubvektortechnik. Danach folgten die 12-g-Enveloppe, und abgeschlagen die negativen G-Lasten. Die Bewertung war dabei teilweise sehr unterschiedlich nach Staat: Schwedische Piloten bewerteten alles (in absoluten Zahlen) etwas geringer, jedoch die 12-g-Enveloppe am höchsten. US-Piloten, welche die Masse der Piloten in der Umfrage ausmachten, dominierten folglich mit ihrer „nationalen Präferenz“ von Helmvisier, hohem Anstellwinkel/3D-Schubvektortechnik und 12-g-Enveloppe die Umfrage, wobei die Abstufungen gering waren. Deutsche Piloten maßen dem Helmvisier ebenfalls den höchsten Wert zu, bewerteten allerdings 12-g-Enveloppe und hohe Anstellwinkel/3D-Schubvektortechnik als gleich nützlich. Negative G-Lasten bewerteten die deutschen Piloten besser als ihre schwedischen Kollegen, aber schlechter als die US-Flieger.[45]
- In der Diskussion wurden gefühlte Probleme und Wünsche verschiedener Systeme angesprochen: gutes Sichtfeld bei HMDs, Probleme mit Ungemütlichkeit und G-LOC bei 12 g, Nutzlosigkeit des HUD, wenn nicht direkt nach vorn gesehen wird, Desorientierung beim Flug mit hohen Anstellwinkeln, Angst, aus Versehen in den Strömungsabriss zu ziehen und dann schnell Energie zu verlieren (weswegen die X-31 mit Force-Feedback-Grenze ausgerüstet wurde) und die Forderung nach sorgenfreiem Manövrieren. Die erfahrenen Piloten waren zufrieden mit der HOTAS-Technik; das Bedienen von 50 Funktionen wurde nicht als Problem gesehen. Berührungsbildschirme wurden als unreife Technik betrachtet und die Zuverlässigkeit von Sprachsteuerung in Frage gestellt. Automatische Kollisionsvermeidung wurde gefordert.[45]
- In der zweiten Umfrage „Situational Awareness“ wurden kognitive und physiologische Fragen zum Situationsbewusstsein 29 Piloten vorgelegt. Davon kamen drei aus Deutschland, zwölf aus Schweden, acht aus Frankreich, fünf aus den Niederlanden und einer aus den Vereinigten Staaten. Die Flugerfahrung lag bei durchschnittlich 2490 Stunden auf Typen wie F-16 Falcon, MiG-29, JAS 39 und Mirage 2000. Die Fragen betrafen unter anderem die Nützlichkeit eines Zwei-Personen-Cockpits (52 % negativ, 38 % positiv, 10 % unentschlossen), Nutzen von HUD, HMD, 3D-Audiosystem und Spracheingabe, sowie Fragen zum Pilotentraining und der Akzeptanz (positiv) von automatischen Manövern.[46]
Einzelnachweise
- Holger Friehmelt et al.: X-31A TACTICAL UTILITY FLIGHT TESTING. In: AGARD Flight Vehicle Integration Panel Symposium on Advances in Flight Testing. September 1996 (nato.int [PDF]). X-31A TACTICAL UTILITY FLIGHT TESTING (Memento des Originals vom 4. März 2016 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- X-31: breaking the stall barrier. (PDF) In: Flight International. 11. Juli 1987, abgerufen am 21. April 2014 (englisch).
- Partners find X-31 funding. In: Flight International. 1. Juli 1998, abgerufen am 21. April 2014 (englisch). oder X-31A receives funding. In: Flight International. 24. September 1988, abgerufen am 21. April 2014 (englisch).
- MBB stresses its involvement in X-31. In: Flight International. 20. Juni 1987, abgerufen am 21. April 2014 (englisch).
- Flight beyond normal limits. (PDF) In: Flight International. 9. Mai 1990, abgerufen am 21. April 2014 (englisch).
- X-31 design frozen. In: Flight International. 5. September 1987, abgerufen am 21. April 2014 (englisch).
- Rockwell plans X-31 testing. (PDF) In: Flight International. 7. Januar 1989, abgerufen am 21. April 2014 (englisch).
- Rockwell and MBB roll out X-31A. In: Flight International. 7. März 1990, abgerufen am 21. April 2014 (englisch).
- X-31A first flight five months late. (PDF) In: Flight International. 17. Oktober 1990, abgerufen am 21. April 2014 (englisch).
- Relocated X-31 flight tests resumed. In: Flight International. 13. Mai 1992, abgerufen am 21. April 2014 (englisch).
- X-31 post-stall manoeuvres accomplished. In: Flight International. 19. Mai 1993, abgerufen am 21. April 2014 (englisch).
- X-31A vertical tail to be removed intrials. (PDF) In: Flight International. 6. Oktober 1993, abgerufen am 21. April 2014 (englisch).
- Rockwell and DASA fly 'tailless' X-31. (PDF) In: Flight International. 30. März 1994, abgerufen am 21. April 2014 (englisch).
- Eurofighter looks to use key X-31 technology. (PDF) In: Flight International. 30. März 1994, abgerufen am 21. April 2014 (englisch).
- X-31 thrust-vectoring option for Eurofighter. (PDF) In: Flight International. 23. April 1994, abgerufen am 21. April 2014 (englisch).
- Eurofighter rejects new control proposal. In: Flight International. 25. Januar 1995, abgerufen am 21. April 2014 (englisch).
- X-31 wrecked after test-flight crash. In: Flight International. 25. Januar 1995, abgerufen am 21. April 2014 (englisch).
- Pitot icing suspected in X-31 crash. In: Flight International. 8. Februar 1995, abgerufen am 21. April 2014 (englisch).
- X-31 crash pilot 'badly briefed'. In: Flight International. 7. Juni 1995, abgerufen am 21. April 2014 (englisch).
- Turning heads. (PDF) In: Flight International. 28. Juni 1995, abgerufen am 21. April 2014 (englisch).
- Europe and USA hold thrust-vectoring talks. In: Flight International. 15. Mai 1996, abgerufen am 30. April 2014 (englisch).
- Sweden joins talks to extend X-31 demonstrator project. In: Flight International. 22. Mai 1996, abgerufen am 21. April 2014 (englisch).
- Sweden funds JAS39 demonstrator. In: Flight International. 1. Oktober 1997, abgerufen am 21. April 2014 (englisch).
- Partners poised to restart X-31 VECTOR. In: Flight International. 18. Februar 1998, abgerufen am 21. April 2014 (englisch).
- X-31 to fly again under tri-national MoU. In: Flight International. 23. Juni 1999, abgerufen am 21. April 2014 (englisch).
- Sweden pressed over funding next phase of X-31 programme. In: Flight International. 15. September 1999, abgerufen am 21. April 2014 (englisch).
- US Navy options for X-31 follow-on. In: Flight International. 18. April 2000, abgerufen am 21. April 2014 (englisch).
- X-31 to be used for thrust vectoring Eurofighter test. In: Flight International. 14. November 2000, abgerufen am 21. April 2014 (englisch).
- X-31 prepares for extreme STOL. In: Flight International. 6. März 2001, abgerufen am 21. April 2014 (englisch).
- X-31 completes first ESTOL testing. In: Flight International. 15. April 2003, abgerufen am 21. April 2014 (englisch).
- VECTOR in high AoA landing. In: Flight International. 13. Mai 2003, abgerufen am 21. April 2014 (englisch).
- Pressemitteilung EADS: Deutsch-amerikanisches Experimentalflugzeug X-31 auf der ILA in Berlin. 10. Mai 2004 (Seite nicht mehr abrufbar, Suche in Webarchiven) Info: Der Link wurde automatisch als defekt markiert. Bitte prüfe den Link gemäß Anleitung und entferne dann diesen Hinweis.
- Carballal et al.: Loads and Requirements for Military Aircraft. In: NATO AGARD-R-815. Januar 1997 (nato.int [PDF]). Loads and Requirements for Military Aircraft (Memento des Originals vom 20. Februar 2013 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- Jim Schefter: X-31 / How they’re inventing a radical new way to fly. In: Popular Science. Februar 1989.
- X-31 Enhanced Fighter Maneuverability Demonstrator Photo Gallery Contact Sheet. In: NASA. 23. Mai 2000, abgerufen am 28. April 2014 (englisch).
- Controlled Flight Beyond Stall The X-31 Aircraft Program. (PDF) In: HAW Hamburg. Mai 2007, abgerufen am 28. April 2014.
- Tischler et al.: Advances in Aircraft Flight Control. Crc Pr Inc, 1996, ISBN 0-7484-0479-1, S. 321–343.
- C.J.Loria et al.: X-31 Quasi-Tailless Evaluation. In: Aerospace Applications Conference. Februar 1996, S. 253–276 vol.4.
- Steven C. Boehmer: X-31 Helmet Mounted Visual & Aural Display (HMVAD) System. In: Proc. SPIE 2218, Helmet- and Head-Mounted Displays and Symbology Design Requirements. Juni 1994.
- Hans W. Pongratz: X-31 helmet-mounted display virtual adversary symbology development and simulation. In: Proc. SPIE 2465, Helmet- and Head-Mounted Displays and Symbology Design Requirements II. Mai 1995.
- X-31 VECTOR PROGRAM PHASE 1 BEGINS. In: NASA. 9. März 1998, abgerufen am 30. April 2014 (englisch).
- Flight test targets set for US/German X-31. In: Flight International. 2. Mai 2000, abgerufen am 21. April 2014 (englisch).
- Different approach. In: Flight International. 23. Oktober 2001, abgerufen am 21. April 2014 (englisch).
- T.J. Lyons: Operational Need. In: Defense Technical Information Center. 2000 (nato.int [PDF]). Operational Need (Memento des Originals vom 4. März 2016 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- T.J. Lyons & J.Y. Grau: 2. “OPERATIONAL NEED” AND “SITUATIONAL AWARENESS” SURVEY. In: Human Consequences of Agile Aircraft, RTO TECHNICAL REPORT 15. 2001 (nato.int [PDF]). 2. “OPERATIONAL NEED” AND “SITUATIONAL AWARENESS” SURVEY (Memento des Originals vom 25. September 2015 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.