EuroRADAR CAPTOR
Das EuroRADAR CAPTOR ist das Bordradar des Eurofighter Typhoon, welches vom EuroRADAR-Konsortium, bestehend aus BAE Systems, Airbus Defence and Space und Selex ES gefertigt wird. Nach einer turbulenten und politisch geprägten Entwicklungsgeschichte wurde das erste Serienradar im Jahr 2003 ausgeliefert. Zur Risikoreduzierung wurde eine mechanisch geschwenkte Antenne aus CFK gewählt. Trotzdem wurden neue Betriebsmodi zur nichtkooperativen Zielidentifizierung von Luftfahrzeugen und eine automatische Zielsuche und -identifizierung im Luft-Boden-Modus implementiert. Um bessere Leistungsparameter zu erzielen, wird seit 1991 an einem aktiv phasengesteuerten Radar gearbeitet. Das neue E-Scan Radar sollte ab 2015 produziert werden, und wird neben elektronischer Strahlschwenkung weitere innovative Betriebsmodi und Technologien besitzen.

Geschichte
Anfänge
Im Juni 1985 begannen Diskussionen zwischen verschiedenen Konzernen, um die Möglichkeit einer Kooperation für das EFA-Radar auszuloten. Großbritannien wählte Ferranti als führenden Vertragspartner aus, Deutschland AEG-Telefunken und Italien FIAR. Spanien, welches über keine Radarerfahrung verfügte, spielte nur eine Nebenrolle.[1] Letzteres wählte später Eesa als Hauptvertragspartner aus. Gegen Ende des Monats wurde ein Memorandum of Understanding zwischen Großbritannien, Deutschland, Frankreich, Italien und Spanien abgeschlossen, um ein gemeinsames Radar für das EFA auszuarbeiten. Frankreich ließ damals bereits durchblicken, dass es sich aus dem Programm zurückziehen wolle. Das französische Unternehmen Thomson-CSF stand so vor einem Dilemma, da es sich gerne an einem EFA-Radar beteiligt hätte.[2] 1987 verhandelte Thomson-CSF deshalb mit Ferranti, um sich Arbeitsanteile zu sichern. Konkret sollte die Wanderfeldröhre zugeliefert werden; möglicherweise dieselbe, die auch in der Rafale zum Einsatz kommen sollte. Im März 1987 hatten Ferranti und AEG ihre Angebote an die Eurofighter Jagdflugzeug GmbH geschickt.[3]

Ferranti präsentierte bereits 1986 sein ECR-90, basierend auf dem Blue Vixen, AEG bot das MSD-2000 „Emerald“ an, was auf dem AN/APG-65 basierte.[4] Hauptargument von Ferranti war, das ein europäisches Kampfflugzeug auch mit einem europäischen Radar ausgestattet werden sollte. Ferranti arbeitete bereits seit 1983 mit Thompson-CSF, Inisel und FIAR an der Entwicklung des Radars zusammen. Frankreich zog sich mit Thompson-CSF im Juni 1985 zurück, ein Jahr später folgte AEG. AEG wollte ein System basierend auf dem APG-65 anbieten, da die Firma hierfür bereits die Produktionslizenz besaß. Es wurde noch spekuliert, ob Thorn-EMI das AN/APG-68 anbieten würde, was aber nicht der Fall war. Beide Anbieter reichten zweiteilige Angebote ein: Eines das die Ausschreibung vollumfänglich erfüllte, und eine abgespeckte Low-Cost-Variante. Ferranti und FIAR boten das ECR-90 und das Super Vixen an, AEG und GEC Marconi das MSD-2000 und das APG-65. Beide High-Tech-Angebote waren aber zu teuer, und die Low-Cost-Alternativen wurden als ungenügend bewertet.
Also wurde eine neue Ausschreibung gestartet. Diesmal wurden die Leistungsanforderungen abgespeckt, auch wurde bei den Herstellern nachgefragt, wie sich die Kosten reduzieren ließen. Die Anforderungen waren auch weniger streng, um den Erfindergeist der Ingenieure zu befeuern.[5] Im Februar 1988 lagen die beiden neuen Angebote vor:[6]
- ECR-90: Das European Collaborative Radar 90 wurde von Ferranti in den Varianten -90, -90A, -90B angeboten. Die Ortungsreichweite war stets dieselbe, nur die Fähigkeiten sollten peu à peu integriert werden. Hauptargument war wieder, dass das Radar einen signifikanten Kostenteil des EFA ausmachen würde, und somit eine europäische Eigenentwicklung eine höhere Wertschöpfung im Inland ermöglichen würde. Zur Risikoreduzierung sollte das ECR-90 auf dem Blue Vixen des Sea Harriers basieren, welches bereits AMRAAM-tauglich war, um Zielupdates an die Flugkörper zu senden. Für das Blue Vixen wurde eine planare Antenne aus einer Leichtmetalllegierung und eine aluminisierte Kohlefaserplatte untersucht, und letztere wegen der höheren Kosten und Unsicherheiten bezüglich der Lebensdauerfestigkeit verworfen. Für das ECR-90 wurde die Wahl noch offen gelassen. Der Antennenantrieb basierte auf dem Blue Vixen und PS-05 des Saab 39, und korrigierte Nick- und Rollbewegungen durch Samarium-Kobalt-Motoren mit je 0,5 PS. Eine Rollsteuerung war nicht vorhanden, Rollwinkel wurden elektronisch ausgeglichen. Die Coupled-cavity Wanderfeldröhre sollte von Selenia oder Thomson-CSF geliefert werden. Die Signalverarbeitung und -prozessoren wurden vom Blue Vixen übernommen. Da die Softwareentwicklung des Blue Vixen etwa 80 % der Entwicklungskosten ausmachte, und etwa 50 % der Software für das ECR-90 übernommen werden sollten, wurden hier Sparmöglichkeiten gesehen. Allerdings konnte Blue Vixen nur 11 der geforderten 31 Radarmodi vorweisen. Der 32-Bit-Signalprozessor sollte aber doppelt so schnell sein, und von Hudges, IBM oder Ericsson geliefert werden. Der D80 des Blue Vixen erreichte etwa 500 MIPS. Die Rechenbausteine waren in Metallkassetten untergebracht, die als Wärmesenke wirkten und in der Mitte von Luft durchströmt wurden. Während das Blue Vixen aus 13.790 Teilen bestand, sollte das ECR-90 aus 13.000 bestehen.[6]
- MSD-2000: Das Multimode Silent Radar 2000 von AEG und GEC Marconi basierte auf dem APG-65. Dies war konsequent, den für den EFA-Vorläufer TKF-90 war das APG-65 geplant gewesen, weswegen auch die Gewichts-, Volumen- und Energievorgaben des EFA-Radars vom TKF-90 übernommen wurden. Marconi kam auch zu dem Schluss, dass eine Neuentwicklung in der verfügbaren Zeit nicht möglich wäre, weswegen das APG-65 der F-18 als Basis akzeptiert wurde. Dieses besaß bereits 28 der geforderten 31 Radarmodi, auch die AMRAAM-Fähigkeit war bereits vorhanden, sodass die Software zu 80 % übernommen werden konnte. Weitere 10 % mussten umprogrammiert, und weitere 10 % neu programmiert werden. Die Zusatzprogrammierung betraf fast ausschließlich die drei fehlenden Modi „Non-Cooperative Target Recognition“, „Visual Identification“, und „Slaved air-to-air acquisition“. Ansonsten sollte die Zahl der Ziele im TWS-Modus, und die ECCM-Fähigkeit verbessert werden. Gegenüber dem APG-65 sollte die Antenne von 68 cm auf 75 cm vergrößert werden, und die Abstrahlleistung verdoppelt werden. Die Empfängerempfindlichkeit sollte erhöht werden, die Antenne mit D/F-Band-Dipolen für ein NATO-IFF-System ausgerüstet werden, und der Signalprozessor gegen ein schnelleres Modell von Marconi ausgetauscht werden. Um die Antennengeschwindigkeit nicht absinken zu lassen, waren neue Samarium-Kobalt-Motoren für den Antennenantrieb geplant. Obwohl die Transmitterleistung gegenüber den APG-65 verdoppelt werden sollte, sollte die Sendeleistung stets so gering wie möglich gehalten werden, um eine Entdeckung zu verhindern. Die Steckkarten sollten von 21 auf 7 verringert werden, trotzdem sollten 25 % der Rechen- und Speicherleistung frei bleiben. Die restlichen 17 freien Plätze stünden so als Auswuchspotential zur Verfügung. Der Radarprozessor sollte vom Foxhunter-Radar des Tornado ADV übernommen werden, basierend auf dem Motorola 68020 mit 32 Bit, um die Rechenleistung um 100 % zu steigern. Insgesamt würden weniger als 15 % des Radars aus den USA kommen.[6]
Die Software des Radars sollte wie die gesamte Software des EFA in Ada programmiert werden.[6] Die USA standen dem benötigten Technologietransfer für das MSD-2000 eher kritisch gegenüber, als dieser im Mai 1988 verhandelt wurde,[7] stimmten im August des Jahres aber dennoch zu. Der Zeitplan sah nun vor, die ersten flugfähigen Radare 1992 fertigzustellen, da 1991 der Erstflug des EFA geplant war, und 1996 mit der Serienproduktion zu beginnen. Spanien befürwortete nun das MSD-2000, da Kosten und Zeitrahmen am realistischsten schienen.[8] Nach dem Oktober 1988 stand die Entscheidung vor der Türe,[9] wobei das ECR-90 von Ferranti das Rennen machte, aber nicht gewählt wurde.
Denn Deutschland war mit der Entscheidung nicht einverstanden, sodass Mitte 1989 der damalige Bundesverteidigungsminister Gerhard Stoltenberg (CDU) mit Tom King (Tory) zu Gesprächen zusammentraf. Es wurde vereinbart eine Studie in Auftrag zu geben, ob das MSD-2000 nicht doch auf die Anforderungen der Briten angepasst werden könnte. Gleichzeitig startete das Verteidigungsministerium des Vereinigten Königreichs eine Studie, wie die Partnerländer ohne Deutschland ein eigenes Radar für das EFA entwickeln könnten.[10] Die MSD-2000-Studie fiel negativ aus, trotzdem weigerte sich Deutschland in dieser Frage nachzugeben. Da nach 18 Monaten immer noch keine Einigung erzielt werden konnte, forderten Großbritannien und Deutschland die Industrie auf, eine Lösung zu suchen. Im Dezember 1989 führte Ferranti Gespräche mit Telefunken System Technik (früher AEG bis Daimler die Firma übernahm) um am ECR-90 mitzuarbeiten, und den deutschen Widerstand aufzulösen. Gleichzeitig warnte die Industrie die Politik vor steigenden Kosten, wegen der Verzögerungen. Die Eurofighter Jagdflugzeug GmbH schickte daraufhin an alle vier Partnerländer und die NEFMA Briefe, in denen darauf hingewiesen wurde, dass alle Zusatzkosten auf diese umgelegt werden würden. Dies war wichtig, da das EFA-Radar als Festpreisvertrag vergeben werden sollte, und den beteiligten Firmen die Verzögerungen erstattet werden sollten.[11] Anfang 1990 schluckte GEC Marconi, welche am MSD-2000 arbeitete Ferranti, welches das ECR-90 konzipierte. Plessey, welche die Raketenwarner des EFA herstellte, wurde von einem Konsortium aus GEC Marconi und Siemens übernommen. An der Radarfront zeichnete sich so eine Entspannung ab.[12] Anfang 1990 wurde GEC-Ferranti schließlich zum Sieger des EFA-Radarwettbewerbes erklärt, und ein Auftrag von £ 300 Mio. vergeben. GEC-Ferranti verhandelte Mitte 1990 mit Ericsson, um die Firma aus dem Euroradar-Konsortium des ECR-90 herauszulösen, und stattdessen die Motorola-68020-Prozessoren des MSD-2000 zu verwenden. Dessen Signalverarbeitung stellten sich bei einem Vergleich als wesentlich leistungsfähiger heraus. Dies wurde wiederum von Deutschland als Problem gesehen, denn durch das Redesign des ECR-90 waren Verzögerungen und weitere Kostensteigerungen unvermeidlich.[13]
Auf NATO-Ebene

Vor dem Vietnamkrieg gingen Militärplaner davon aus, dass zukünftige Luftkämpfe auf große Entfernungen mit weitreichenden Luft-Luft-Flugkörpern entschieden werden. Der Vietnamkrieg und die dort eingesetzten Flugzeuge zeigten allerdings, dass diese Vorstellung reine Phantasie war: Da Radargeräte nur einen Punkt auf dem Schirm anzeigen, und das Schießen auf unidentifizierte Objekte in jedem Krieg und bei jeder Waffengattung stets verboten war, war eine visuelle Identifizierung notwendig. Dies führte zusammen mit den unzuverlässigen Luft-Luft-Raketen dazu, dass fast jedes Luftgefecht im Kurvenkampf begann und endete.
Die neuen F-16-Kampfflugzeuge wurden deshalb teilweise mit dem Teledyne Mk.XII Advanced IFF System ausgerüstet, welches als APX-109 bezeichnet wurde. Das System sendet eine Abfrage an das Ziel, welches mit einer Antwortsequenz antwortet.[14] Beides spielt sich im niedrigen L-Band ab, mit einer Anfrage bei 1030 MHz, und einer Antwort auf 1090 MHz.[15] Zu diesem Zweck wurden vor der Cockpithaube vier Antennen angebracht, welche im Jargon als „Vogelschlitzer“ bezeichnet werden.
Um ein NATO-einheitliches IFF-System zu bekommen, schlossen sich Anfang der 80er Jahre die USA, Deutschland, Frankreich, Italien und Großbritannien zusammen, um das Nato Identification System (NIS) zu entwickeln. Es sollte eine Freund-Feind-Abfrage zwischen Luftzielen, Bodenzielen und zwischen Luft- und Bodenzielen ermöglichen. Das System stellt im J-Band eine Anfrage, die Antwort erfolgt im L-Band bei etwa 1000 MHz. Besonders die Wahl der Antwortfrequenz führte zu Verzögerungen am NIS, da die Europäer auf dem E/F-Band bestanden, während die USA das L-Band bevorzugten. Nachdem die USA in einer Studie, welche von 1982 bis 1983 ging zeigen konnte, dass die Störfestigkeit und Interferenz im D-Band nicht schlechter als im E/F-Band war, was die Europäer befürchtet hatten, bestand nur noch Deutschland auf dem E/F-Band. Als Kompromiss wurde vorgeschlagen, sowohl L-Band als auch E/F-Band Antennen zu integrieren. Die Ratifizierung des STANAG 4182 (nicht zu verwechseln mit dem STANAG 4579, welches im Ka-Band arbeitet) zog sich deshalb hin, bis auch Deutschland das L-Band akzeptierte.[16]
Als 1984 die NATO Research Study Group (RSG-12) ihre Arbeit aufnahm, wurde der Mangel an Möglichkeiten zur nichtkooperativen Zielidentifizierung (engl.: Non cooperative target identification, NCTI) als größtes Defizit erkannt. Dazu wurde unter dem STANAG 4162 eine Reihe von NATO-Forschungsprogrammen gestartet, und diese Fähigkeitslücke zu schließen. Die Arbeiten liefen in vier Phasen ab, alle Ergebnisse sind NATO SECRET:[17]
- Zuerst erörterten Dänemark, Frankreich, Deutschland, Niederlande, Norwegen, Großbritannien, die USA und das SHAPE Technical Centre, welche technischen Möglichkeiten sich zur NCTI eigenen würden. Vorgeschlagen wurden High Range Resolution (HRR), Inverse Synthetic Aperture Radar (ISAR), die Kombination aus beidem, Jet Engine Modulation (JEM), davon abgeleitet Helicopter Rotor Modulation (HERM), die Modulation der Rückstreuung durch die Vibration der Flugzeugzelle, die Fluktuation der Rückstreuung allgemein, Polarimetrie, Resonanztechniken und nicht-lineare Streueffekte. Als einfachste Variante wurde die Analyse der Turbinenschaufelblätter (JEM) befunden, und ausgewählt. HRR und ISAR wurden ebenfalls als vielversprechend angesehen, aber aufgrund der Abhängigkeit von verschiedenen Außenlastkonfigurationen als problematisch angesehen. Die erste Phase, welche von 1984 bis 1988 lief, war damit abgeschlossen.
- Die zweite Phase lief von 1988 bis 1992, und sollte den JEM-NCTI-Modus implementieren. Dafür arbeiteten Kanada, Dänemark, Frankreich, Deutschland, Niederlande, Norwegen, Großbritannien, die USA und das SHAPE Technical Centre zusammen. Dazu wurde vom 3. bis 28. April 1989 das TIME-Experiment (Target Identification by Modulation Exploitation) in der WTD 81 durchgeführt: 23 Flugzeuge und 16 verschiedene Flugzeugtypen wurden im L, S, C, X und Ku-Band bestrahlt, um eine Datenbank zu erstellen. Das Experiment zeigte das JEM ein sehr mächtiges Werkzeug zur nichtkooperativen Zielidentifizierung ist, aber ein relativ hohes Signal-Rausch-Verhältnis benötigt.
- Die dritte Phase lief von 1992 bis 1996, und sollte den ISAR-NCTI-Modus implementieren, um die Nachteile der JEM zu umgehen. Dafür arbeiteten Dänemark, Frankreich, Deutschland, Niederlande, Norwegen, Großbritannien, die USA und NC3A zusammen. Das Ziel war, Radarbilder der Ziele sowohl in Querrichtung (2D-ISAR) als auch in Längsrichtung (HRR) zu erstellen. Dazu wurde vom FGAN am 28. und 29. Januar 1993 ein Workshop veranstaltet, um die ein- und zweidimensionale Radarabbildung besser zu verstehen. RSG-12 veranstaltete 1992 in Deutschland, Großbritannien und Frankreich Testflüge, wo 9 verschiedene Flugzeugtypen gegen die Radare BYSON (DERA) und TIRA (FGAN) geflogen wurden. BYSON sammelte HRR-Daten, TIRA für HRR und ISAR. Im Oktober 1993 wurden in den Niederlanden weitere Testflüge unternommen, um eine 2D-ISAR-Zielbibliothek zu bekommen. Die teilnehmenden Radare waren FELSTAR (TNO), TIRA (FGAN), MPR (DERA) und RAMSES (ONERA), sowie 15 verschiedene Flugzeuge, davon 13 unterschiedliche Typen. Die gewonnenen Daten waren von hoher Qualität, und wurden unter den Teilnehmern getauscht. In der abschließenden Diskussion, ob HRR oder 2D-ISAR das NCTI-Verfahren der Wahl sei, gab es eine Tendenz zu HRR: Das Verfahren zeigte nach allen Richtungen eine gute Identifizierungsmöglichkeit, und benötigt nur ein moderates Signal-Rausch-Verhältnis.
- Die vierte Phase lief von 1996 bis 1999, und sollte den ISAR-NCTI-Modus verbessern, um Probleme wie Autofokus und manövrierende Ziele zu erforschen. Zusätzlich sollten Methoden zur Signaturmodellierung für gegnerische Fluggeräte erforscht werden, und die Informationsfusion aus JEM, HRR und 2D-ISAR untersucht werden. Die Anwendung von Polarimetrie war ebenfalls ein Thema. Dafür arbeiteten Kanada, Dänemark, Frankreich, Deutschland, Griechenland, Italien, Niederlande, Norwegen, Spanien, Großbritannien, die USA und NC3A zusammen. Dazu wurde im November 1997 bis Februar 1998 das CARMINA (Correlated Attitude Radar Measurements of Images of Non-cooperative Aircraft) Experiment im niederländischen, französischen und britischen Luftraum mit sechs Flugzeugen durchgeführt. Beteiligt waren die Radare TIRA (FGAN), BYSON (DERA), MERIC (ONERA), HYPERBRAHMS (DGE) und FELSTAR (TNO). Diese Daten wurden mit den Radardaten verglichen, welche von Flugzeugmodellen (real und als Computermodell) angefertigt wurden.
Von 1999 bis 2004 führten die wohlbekannten Länder Kanada, Dänemark, Frankreich, Deutschland, Niederlande, Norwegen, Großbritannien und die USA das NATO-RTO-Programm „Countermeasures to Imaging Radars“ durch. Ziel war es Störtechniken zu entwickeln, um SAR-, ISAR- und HRR-Betriebsmodi zu stören oder zu manipulieren, um damit unter anderem eine nichtkooperative Zielidentifizierung zu verhindern. Durch kohärente Störsender lassen sich Bilder manipulieren (z. B. eine F-16 wie eine C-130 aussehen lassen), oder durch die Erzeugung von Rauschen Bilder verdecken.[18]
Auslieferung und Weiterentwicklung
Nach der gütlichen Einigung wurde das ECR-90 durch das Euroradar-Konsortium, bestehend aus GEC Marconi und FIAR (heute Selex ES), ENOSA (heute Indra) und DASA (heute Airbus Defence & Space) zur Serienreife entwickelt. Dazu wurde auch eine BAC 1-11 als fliegende Entwicklungsplattform eingesetzt. Die Entwicklungsschritte gingen von dieser zu einem Einbaumodell, welches zuerst im Entwicklungsflugzeug DA5 (Development Aircraft) erflogen wurde. Dabei wurden zuerst Luft-Luft-Radarmodi getestet, dann Luft-Luft-Modi unter ECM-Einfluss, und abschließend Luft-Boden-Modi. Die Tests erfolgten in enger Abstimmung mit den Tests der Sensorfusion (AIS), der Waffen und der Navigation.[19] Im Mai 1996 wurde dabei festgestellt, dass die Radarenergie das Radom teilweise nicht verlassen konnte, da die Frequency Selective Surface (FSS) für Flashbacks sorgte. Das Problem wurde gelöst, indem die Antenne von vertikaler auf horizontale Polarisation umgestellt wurde, und das Radom neu konstruiert wurde. Hauptproblem war, dass das Design des Radoms vom British Aerospace durchgeführt wurde, und die Arbeit zwischen AEG in Deutschland, Alenia in Italien und CASA in Spanien aufgeteilt wurde. Im Rückblick wurde festgestellt, dass es besser gewesen wäre, die Aufträge für Radar und Radom an eine Firma zu vergeben. Die Hauptverantwortung für das Radar wurde deshalb von DASA auf BAE Systems übertragen.[20] Als PR-Maßnahme – Deutschland versuchte zur Zeit den Ausstieg aus dem Projekt – wurden im September Testflüge mit dem ECR-90 und hochrangigen Regierungsvertretern aller vier Partnerländer in der BAC 1-11 durchgeführt, um zu zeigen, dass das Radar die Performanceziele erfüllt. Das Radar besaß noch keine Korrekturen, diese wurden erst bei DA5 umgesetzt, welches im November 1996 mit dem ECR-90 zum ersten Mal flog.[21]
.jpg.webp)
Analysen, die Ende der achtziger Jahre zum European Fighter Aircraft (EFA) erstellt wurden zeigten, dass die Ortungsreichweite des ECR-90-Radars durch bekannte sowjetische Tarnkappentechnik und abstandswirksame Störsender auf unter 9 km sinken würde.[22] Um bessere Leistungsparameter zu erzielen, schlossen GEC Marconi und Thompson-CSF, welche das Radar für Eurofighter bzw. Rafale entwickelten, 1991 eine Kooperation zur Entwicklung der AESA-Technik ab.[23] Im Mai 1995 verhandelte sich auch Daimler-Benz Aerospace (DASA) in das Konsortium ein, um ein AESA-Radar namens AMSAR (Active-array Multi-role Solid-state Airborne-Radar) zu entwickeln, nachdem Ende 1994 bereits zwei 5-Watt-Module gefertigt wurden.[24] 1996 starteten die Arbeiten zum AMSAR, für das Jahr 2002 waren bereits Flugtests angesetzt. Das britische Future Offensive Air System (FOAS), welches damals noch als französisch-britisch-deutsches Gemeinschaftsprojekt und als Tornado-Ersatz angedacht war, sollte ebenfalls diese Technologie nutzen, um kleine Radaranlagen an Flügelwurzeln, Vorderrumpf und Heck zu tragen, um das Sichtfeld zu erhöhen. Dies würde auch die Flexibilität im Kampf erhöhen, da Gegner geortet und mit Flugkörpern beschossen werden könnten, ohne die Flugzeugnase auf sie zu richten. Damit wäre auch eine Erhöhung der F-Pole-Distanz möglich, welche die Entfernung zwischen Ziel und Abschussplattform beschreibt, wenn die Rakete im Ziel einschlägt.[25]
1999 flogen die Entwicklungsflugzeuge DA4 und DA5 erstmals mit der Serienversion des ECR-90, von da an wurde nur noch an der Sensorfusion gearbeitet.[26] Am 13. Juni 2003 wurde schließlich der erste seriengefertigte Eurofighter der Öffentlichkeit vorgestellt. Die Bundeswehr nahm die Maschine am 4. August desselben Jahres ab.[27] Mit Beginn der Auslieferung wurde das ECR-90C in CAPTOR-C umbenannt. Die Entwicklung des AESA-Radars für den Eurofighter krebste danach nur noch durch die Ministerien, ein konkreter Entwicklungsauftrag erging nicht. Das Euroradar treibt deshalb die Entwicklung mit Eigenmitteln voran. Geplant ist ein Radar mit schwenkbarer Antenne, um den Sichtbereich zu erhöhen. 2002 finanzierte das Euroradar-Konsortium die Entwicklung des CAESAR-Demonstrators (Captor AESA Radar). Als Basis wurde das CAPTOR-C gewählt. Nach fast dreijähriger Entwicklungszeit erfolgte am 24. Februar 2006 der erste Testflug an Bord der BAC 1-11. Am 8. Mai 2007 flog das Eurofighter Development Aircraft 5 (DA5) zum ersten Mal mit dem CAESAR. Das neue Radar bestand aus 1424 Transmittern welche aufgrund ihrer Leistungsdichte flüssiggekühlt werden mussten.[28] Die Entwicklung des CAPTOR-E mit geneigter Antenne wurde am 1. Juli 2010 gestartet, Flugtestmodelle sollen bis 2013 fertig und Serienmodelle ab 2015 verfügbar sein.[29] Die Kosten dafür werden von der Industrie vorgeschossen und sollen später durch die Eurofighter-Partnerländer zurückgezahlt werden, da von staatlicher Seite momentan keine Mittel zur Verfügung stehen.[30] Das Verteidigungsministerium des Vereinigten Königreichs finanzierte schließlich Flugtests mit dem als CAPTOR-E bezeichneten Prototypen, welcher Module auf GaAs-Basis einsetzen wird. Für die spätere Serienversion, welche ab 2015 fliegen soll, war die fortschrittlichere GaN-Technik geplant.[31] Ab dem Frühjahr 2013 wurde ein Prototyp des CAPTOR-E in IPA5 eingebaut,[32] der Anfang März 2014, mehrere Monate vor dem Zeitplan, zum ersten Mal flog.[33] Auf der Luftfahrtmesse in Farnborough des Jahres unterzeichnete Großbritannien einen Vertrag über weitere 72 Mio. Pfund, um landesspezifische E-Scan-Tests durchzuführen. Offizielle der vier Partnerländer waren ebenfalls anwesend, um die Bedeutung des Projektes zu unterstreichen. Der Vertragsabschluss soll 2014 stattfinden.[34] Am 13. November 2014 gab der Haushaltsausschuss den deutschen Anteil von 340 Mio. Euro für die insgesamt 1 Mrd. Euro teure CAPTOR-E-Entwicklung frei.[35] Am 19. November wurde der Vertrag zwischen den vier Partnernationen unterzeichnet.[36]
Überblick
Da kampfflugzeuggestützte Radare eine hohe Reichweite mit Wetterunabhängigkeit verbanden, schritt die Radarentwicklung nach dem Krieg schnell voran. Das FuG 240 „Berlin“ wies bereits alle wesentlichen Merkmale heutiger Modelle auf. Ab den 70er Jahren kam noch die Look-down/shoot-down-Fähigkeit dazu, um die Radarechos sich bewegender Objekte (vorzugsweise anderer Flugzeuge) von durch Bodenreflexion erzeugten Radarechos zu unterscheiden. Eine dauerhafte Führung durch GCI war somit nicht mehr nötig. Die F-4 Phantom war das erste Kampfflugzeug, das sich ausschließlich nach seinem eigenen Radar richten konnte.
Um der steigende Bedrohung durch Radargeräte zu begegnen, wurden Anti-Radar-Luft-Luft-Raketen, elektronischen Gegenmaßnahmen (ECM) und Tarnkappentechnik entwickelt. Anti-Radar-Lenkwaffen wie die russische R-27P oder die amerikanische Brazo auf Sparrow-Basis steuern die Radaremissionen des Ziels an, welche entweder direkt oder indirekt zum Sucher der Waffe gelangen. So wurden ab April 1974 mit der Brazo Testschüsse durchgeführt, wobei der Flugkörper entweder ein weit entferntes Luftziel von vorne ansteuerte, oder eine tieffliegende Drohne von hinten.[37][38] Obwohl nicht explizit erwähnt, wird der Flugkörper das Ziel im Tiefflug von hinten durch die Rückstreuung ansteuern, welche Haupt- und Nebenkeulen am Boden erzeugen. Nachdem die passive Sparrow-Variante Brazo ebenso wie die infrarotgelenkte Version AIM-7R dem Budget zum Opfer fielen, ereilte die Joint Dual Role Air Dominance Missile (JDRADM), welche AGM-88 und AIM-120 durch eine aktiv/passiv radargelenkte Luft-Luft/Boden-Rakete ersetzen sollte, 2013 dasselbe Schicksal.
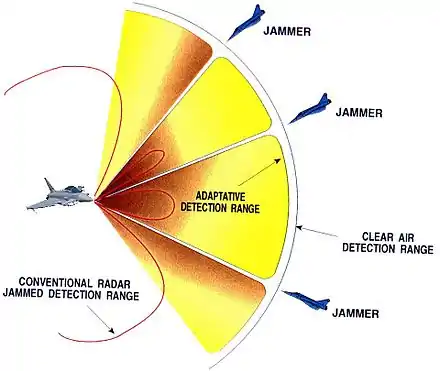
Elektronische Gegenmaßnahmen versuchen hingegen die Arbeit des gegnerischen Radars zu erschweren, indem das Radar mit Impulsantwortstörungen oder Rauschstörungen belegt wird. Letzteres reduziert die Ortungsreichweite des Radars, da das Signal-Rausch-Verhältnis verschlechtert wird. Das Ergebnis ist somit dasselbe wie bei Stealth-Technik, nur dass Tarnkappentechnik rein passiv arbeitet und die reduzierte Reichweite vom Gegner nicht bemerkt wird, während die aktive Störung entdeckt wird. Allerdings schützt Tarnkappentechnik nur die eigene Plattform, während Störsender allen Zielen zugutekommen, welche im Erfassungsbereich des Radars liegen.

Moderne Radare sind als Active Electronically Scanned Array aufgebaut. Das Radar besteht somit aus mehreren hundert kleinen Transmit/Receive-Modulen (TRM), welche unabhängig voneinander angesteuert werden können, um die Hauptkeule elektronisch zu schwenken. Durch die unabhängige Arbeitsweise können auch mehrere Signalkeulen erzeugt werden, oder alle Module mit unterschiedlicher Frequenz arbeiten, um das Radar als sehr starken Rauschstörsender einzusetzen. Das AN/APG-79 der F/A-18E/F war das erste Radar, das über diese Fähigkeit verfügt. Prinzipbedingt ist dies nur im Sendeband des Radars möglich, X-Band-Radare können also nur X-Band-Radare stören. Kommt das Ziel näher, ist die Reflexion des Radarechos am Flugzeug irgendwann stark genug, um vom Rauschen des Störsenders unterschieden zu werden. Diese Entfernung wird als burn-through range bezeichnet, unterhalb der das Rauschstören nutzlos ist. Allerdings steigt die Leistungsdichte des Radarstrahls immer weiter an, je weiter man sich der Antenne nähert. Wird eine bestimmte Entfernung unterschritten, kann das AESA-Radar als Energiewaffe eingesetzt werden (engl. High Power Microwave, HPM). Obwohl der militärisch-industrielle Komplex der USA aus Marketinggründen erklärt, das AN/APG-77 und -81 der F-22 Raptor und F-35 Lightning könnten feindliche Sensoren „grillen“,[39] ist die effektive Strahlungsleistung von Kampfflugzeugradaren zu gering, um die nötige Feldstärke auf über 250 m zu erreichen. Allerdings können durch geschickte Wahl der Sendeimpulse und Impulsfolgefrequenzen auch bei wesentlich niedrigeren Feldstärken (und damit höheren Reichweiten) Ströme in feindliche Netzwerke oder Prozessoren induziert werden um die Bitfehlerhäufigkeit zu erhöhen, was die Rechner verlangsamt oder abstürzen lässt.
AESA-Antennen können auch als High-Speed-Datenlink eingesetzt werden, bei X-Band-Antennen werden über 548 MBit/s beim Senden und 1 GBit/s beim Empfang erreicht. Die Datenübertragungsrate von Radar zu Radar ist damit wesentlich größer als bei Link 16, welches bis zu 284 kBit/s erreicht. Damit können sehr große Datenpakete wie SAR-Bilder in Sekunden übertragen werden,[40] oder durch Kombination aus Radar- und Datenlinkfunktion ein Bistatisches Radar zwischen zwei AESA-Antennen errichtet werden. Wenn sich ein AESA-Radar mit gleichem Frequenzbereich im Weltall befindet, kann das Bistatische Radar auch zwischen Weltraum und Flugzeug gebildet werden, um dem Flugzeug eine rein passive Ortungsmöglichkeit zu geben. Das Prinzip wurde im November 2007 vom DLR nachgewiesen, als der aktive Satellit TerraSAR-X und das passive luftgestützte Radar F-SAR SAR-Bilder erstellten.[41]
Die Fähigkeit, Datenpakete in X-Band-Kommunikationssysteme einzuspeisen, ermöglicht auch Cyberangriffe auf feindliche Rechnersysteme, sofern Exploits genutzt werden können, um die gegnerische Sicherheitstechnik zu umgehen. Diese Fähigkeit soll mit der F-35 Lightning Einzug in die US Air Force halten.[42] Auch der Next Generation Jammer mit GaN-AESA-Technik, welcher die AN/ALQ-99 ablösen soll, wird Malware in feindliche Computersysteme einspeisen können.[43] Böse Gerüchte besagen, das manche Computerchips über einen eingebauten kill switch verfügen, über den der Chip aus der Entfernung abgeschaltet werden kann, falls das System in feindliche Hände fällt. In der angesehenen Fachzeitschrift IEEE Spectrum wurde ein Vertreter der Rüstungsindustrie dahingehend zitiert.[44] Die DARPA hat dazu das Trusted Integrated Circuits (TRUST) Programm gestartet um sicherzustellen, dass Chips in US-Systemen keine „bösartigen Schaltkreise“ enthalten.[45] Denkbar ist der Einsatz des Radars als Energiewaffe, um dem Chip das Signal zu geben. Beispielhaft war die Operation Orchard, bei der ein dem Suter ähnliches Programm eingesetzt worden sein soll, um einen Cyberangriff auf die syrische Luftverteidigung durchzuführen.[46]
Technik
Allgemein
Das CAPTOR wurde für den Luftkampf mit Beyond Visual Range Air-to-Air Missiles (BVRAAM) unter starken gegnerischen elektronischen Gegenmaßnahmen optimiert, dies resultierte aus den Anforderungen des Kalten Krieges.[47][48] Seit dessen Ende verschob sich das Hauptaugenmerk des Eurofighters von Jagd- zu Mehrzweckkampfflugzeugaufgaben. Deshalb wurden die Bodenangriffsfähigkeiten des Radars in diese Richtung weiterentwickelt. Die mechanische Steuerung wurde in der Anfangsphase des Eurofighter-Projektes ausgewählt, da ein möglichst geringes Entwicklungsrisiko eingegangen werden sollte. Laut den Projektverantwortlichen wurde die Technologie einer mechanisch geschwenkten Antenne mit dem CAPTOR voll ausgereizt.[49]
Das Radar besteht aus einer mechanisch gesteuerten Antenne aus kohlenstofffaserverstärktem Kunststoff mit 0,7 Metern Durchmesser.[48][50] Die Antenne kann um ±60° in Elevation und Azimut geschwenkt werden, zur Antennensteuerung werden vier hochpräzise Samarium-Kobalt-Servomotoren mit hohem Drehmoment verwendet, um hohe Abtastgeschwindigkeiten zu erzielen.[51] Die Motoren können die planare Antenne nur im Elevations- und Azimutwinkel bewegen, der Ausgleich von Rollwinkeln findet elektronisch durch kombinierte Ansteuerung statt, um das Gewicht zu reduzieren. Durch die für eine mechanisch geschwenkte Antenne sehr hohe Scangeschwindigkeit kann das Radar auch verschiedene Radarmodi verschränken (interleaving), was sonst nur mit Phased-Array-Antennen möglich ist, dort allerdings wesentlich schneller. So können zum Beispiel Luft-Luft und Luft-Boden-Modi in einem Scandurchgang kombiniert werden.[51][50] Die Genauigkeit beträgt dabei unter einem Milliradiant in der Ausrichtung und unter 10 Meter bei der Entfernungsmessung.[52]
Das CAPTOR arbeitet im X-Band von 8 bis 12 GHz (horizontal polarisiert) und besitzt die doppelte Sendeleistung des AN/APG-65.[51] Es wechselt automatisch zwischen niedrigen, mittleren und hohen Pulswiederholungsraten. Diese betragen 1000 bis 200.000 Impulse pro Sekunde, wobei das Hauptaugenmerk auf mittlere Pulswiederholungsraten gelegt wurde.[48] Die Freund-Feind-Erkennung ist in das Radargerät integriert und wird normalerweise vollautomatisch betrieben. Die Signalverarbeitung besteht aus 61 Steckkarten (Shop Replaceable Items) und 6 Line Replaceable Units. Durch das modulare Design sind einfache Reparaturen und Upgrades möglich. Die eingebaute Selbstdiagnosefähigkeit bezeichnet die defekte SRI, welche am Boden durch einen Laptop ausgelesen werden kann, ohne die Stromversorgung einschalten zu müssen. Ist die SRI tatsächlich defekt, wird sie ausgewechselt.[53] Die Software wurde in ADA nach MIL STD 2167A-Standard geschrieben.[50] Das CAPTOR ist das erste NATO-Radar mit drei Verarbeitungskanälen. Der erste Kanal dient der Zielsuche, der zweite der Zielverfolgung und Identifizierung und der Dritte zur Lokalisierung, Klassifizierung und Überwindung von Störmaßnahmen sowie zur Nebenkeulenunterdrückung.[47] Das Gesamtsystem wiegt 193 kg, die Kühlung der Rechnerkomponenten erfolgt sowohl flüssig als auch mit Luft.[47]
Signalverarbeitung
Durch die im Eurofighter Typhoon praktizierte Sensorfusion über das Attack and Identification System (AIS) werden die Radarmodi im Normalfall vom Bordcomputer automatisch angewählt, die Bedienung des CAPTOR findet ausschließlich nach dem VTAS-Prinzip (VTAS – Voice, Throttle and Stick) statt.[54][51] Die generelle Arbeitsweise des Radars ist dabei wie folgt: Zuerst sendet das Radar im Modus Velocity Search (VS), um nahende Ziele auch im Bodenclutter zu entdecken. Werden Ziele entdeckt, wird in den Range While Search (RWS) Modus gewechselt. Anschließend beginnt der Computer ein Trackfile anzulegen, und arbeitet im Track While Scan (TWS) Modus weiter, während nach neuen Zielen gesucht wird. Anschließend wird die Identität der Ziele durch NIS oder NCTI festgestellt, und die Bedrohungen priorisiert. Danach werden gegebenenfalls weitere Modi wie Raid Assessment und Threat Assessment angewandt.[48] Weitere Betriebsmodi und Fähigkeiten sind, nicht vollständig gelistet:
- Synthetic Aperture Radar / Automatic Target Recognition: Auch ältere Flugzeugmuster verfügen über einen SAR-Modus, der Pilot muss Ziele jedoch selbst suchen, vorausgesetzt die Auflösung des Bildes ist hoch genug. Beim CAPTOR-D/E ist diese Funktion automatisiert: Das hochauflösende SAR-Bild wird zuerst mit einem Gauß-Filter geglättet um Details zu reduzieren. Dann wird von jedem Pixel ausgehend der Gradient und die Richtung desselben zum Nachbarpixel bestimmt. Wenn die Größenordnung des Gradienten eines Pixels in eine bestimmte Richtung größer als die des Nachbarpixels ist, wird der Pixel zur Kante erklärt, und sonst dem Hintergrund zugeordnet. Schwache Kanten werden durch einen Hysterese-Schwellenwert eliminiert (Canny-Algorithmus). Nachdem ein weiterer Algorithmus geschlossene Strukturen erzeugte, werden die invarianten Fourier-Deskriptoren des Bildes berechnet, und diese zur automatischen Zielidentifizierung in ein künstliches neuronales Netz eingespeist.[55] Hier laufen mehrere Subnetze parallel, das Endergebnis zwischen den Subnetzen wird durch Voting bestimmt.[56] Die Positionen der erkannten Ziele werden nun auf dem SAR-Bild durch rote Rauten markiert, über der Raute wird in roter Schrift der Zieltyp eingeblendet, z. B. „T-72“ oder „MLRS“. Das erzeugte Radarbild wird über eine im Computer gespeicherte vektorisierte Landkarte mit bekannten GPS-Koordinaten gelegt, um die GPS-Daten der Ziele zu errechnen. Alternativ kann Anhand der eigenen GPS-Position und unterschiedlichen Aufnahmewinkeln und Entfernungen die GPS-Zielposition ermittelt werden. Zum Training des Neuronalen Netzwerkes entwickelte EADS eine Software, in der CAD-Modelle von Zielen auf eine Landkarte gesetzt werden, und die Szene in ein SAR-Bild umgerechnet wird. Der Algorithmus versucht dann trotz störender Objekte, unterschiedlicher Zielwinkel und Teilverdeckung der Ziele diese zu entdecken.[57][58]
- Non Cooperative Target Identification: Seit Ende der 80er Jahre sind Radare generell zu JEM fähig, welches aber nur im vorderen Bereich des Flugzeuges funktioniert, da die Turbine einsehbar sein muss. Für Kampfflugzeugradare der nächsten Generation war die Implementierung von HRR vorgesehen. Wie der Name High Range Resolution bereits andeutet, wird das Ziel der Länge nach profiliert. Dazu werden eine Reihe von schmalbandigen Nanosekunden-Pulsen ausgesendet, um eine hohe Entfernungsauflösung im Meterbereich zu erzielen. Neben dieser Standardmethode gibt es auch die Möglichkeit, schmalbandige Chirps mit gestuften Trägerfrequenzen als Kontinuum zu senden. Ersteres war bereits vor 1987 möglich, Letzteres wurde von BAE Systems neu entwickelt. Welche Methode beim CAPTOR angewendet wird ist geheim, wahrscheinlich aber Letztere. Das Radarecho des Ziels gibt nun über der Zeit einen charakteristischen Frequenzverlauf ab, da ein Puls zuerst von Nase, Cockpithaube, Lufteinlauf, Vorderkanten der Tragflächen und Seitenleitwerk reflektiert wird (Wenn das Ziel von vorne bestrahlt wird). Generell wird eine Bandbreite von 400 MHz und eine Vielzahl von Messungen als notwendig erachtet, um Luftziele zu identifizieren. Zusammen mit den Trackdaten des Ziels, welche benötigt werden um den Winkel des Ziels zum Radar zu bestimmen, kann der charakteristische Frequenzverlauf des Echos über der Zeit durch einen Datenbankabgleich einem Zieltyp zugeordnet werden.[59] Danach wird dem Piloten im Display ein Kürzel für den Flugzeugtyp angezeigt, z. B. „Mrg3“ oder „Flkr“. Um die Datenbank-Größe nicht ausufern zu lassen werden für Einsätze jeweils nur die Flugzeugtyp-Daten geladen, mit dessen Auftreten im jeweiligen Gebiet zu rechnen ist.[60] Da die Außenlastkonfiguration des Zieles nicht bekannt sind, kann es zu Schwierigkeiten bei der nichtkooperativen Zielidentifizierung kommen. In diesem Fall werden Hunderte von HRR-Profilen des Zieles erstellt, um die Echos der Außenlasten herauszufiltern, und daraus ein ISAR-Bild zu errechnen. Allerdings muss sich das Ziel dafür relativ zum Radar bewegen, und das Radar lange auf dem Ziel verweilen, was taktisch ungünstig ist.[59] Das ISAR-Bild kann dem Piloten vermutlich im „Visual Identification“ Modus auf den Displays dargestellt werden, die Auflösung pro Pixelpunkt ist schlechter als bei PIRATE.
- Space-Time Adaptive Processing / Combat Search: Diese Fähigkeit ist das Herzstück des CAPTOR-E. Beim Space-Time Adaptive Processing (STAP) können langsamfliegende Ziele auch unter dem Einfluss von Clutter und Störstrahlungen erkannt werden, selbst wenn deren Echosignal sonst in den Störsignalen untergehen würde. Dazu werden mehrere Subaperturen benutzt, mit denen das vom Boden zurückgeworfene Wellenfeld zeitversetzt abgetastet wird. Die Signale in den einzelnen Kanälen unterscheiden sich im Idealfall nur durch diesen Zeitversatz. Bewegte Ziele mit einer radialen Geschwindigkeitskomponente ändern jedoch innerhalb dieser Zeitspanne ihren Abstand zu Sensor, so dass die Signale einer Phasenverschiebung unterliegen und von den Cluttersignalen unterschieden werden können. Bei der Umgebung des Echosignales eines Zieles wird nicht mehr nur die zeitliche Änderung betrachtet, sondern auch mit der räumlichen Änderung verglichen (Space-Time).[61] Das Prinzip wird auch angewandt, um langsame Bodenziele im Ground Moving Target Indication (GMTI) Betriebsmodus zu entdecken.[62] Geht im TWS-Modus ein Luftziel verloren, muss das vermutete Zielgebiet nicht mehr zeitintensiv mit einer Signalkeule abgeschwenkt werden: Der Modus Combat Search erzeugt multiple Signalkeulen, welche das Zielgebiet schachbrettartig in einem Winkelbereich von 20° × 20° belegen. Idealisiert reicht so ein Puls, gesendet und empfangen durch mehrere Signalkeulen, um das verlorene Ziel wieder zu finden.[63]
- Jammer Mapping / Deterministic Nulling: Das CAPTOR-E (Gerüchten zufolge auch CAPTOR-M) verfügt über die Fähigkeit zum Jammer Mapping. Dabei wird die Identität und der Winkel der Störsender durch Spektralverarbeitung mit hoher Genauigkeit ermittelt. Das CAPTOR-E beginnt dann mit dem Digital Adaptive Beamforming: Da die Richtcharakteristik einer AESA-Antenne durch Ansteuerung der T/R-Module beliebig manipuliert werden kann, werden in Richtung der Störsender Nullstellen ins Antennendiagramm gesetzt.[63] Die Kunst besteht darin, die Nullstellen so schmal wie möglich zu machen, damit Ziele neben Störern sicher erkannt werden können. Bei AMSAR-Flügen konnte so die Signalstärke von Störquellen bis auf das Hintergrundrauschen abgesenkt werden, sodass Ziele wieder zum Vorschein kamen.[64] Um das Ergebnis zu verbessern, wird noch Deterministic Nulling angewandt. Dabei werden die Empfangssignale der T/R-Module über alle Freiheitsgrade der Antenne vom Signalprozessor unterschiedlich gewichtet, um den Einfluss von Störern weiter zu reduzieren.[62] Das Prinzip ist im Bild rechts dargestellt.
- Low Probability of Intercept: Um die Entdeckungswahrscheinlichkeit durch feindliche Radarwarner und Elektronische Unterstützungsmaßnahmen zu reduzieren, wird das CAPTOR-E einen LPI-Betriebsmodus erhalten. Details sind darüber nur wenig bekannt; so soll das Radar mit einer breiten Hauptkeule senden, und durch multiple Keulen mit hohem Antennengewinn empfangen.[63]
- Noise Jamming / High-Power Microwave: Beim Einsatz als Störsender sendet das Radar in allen Frequenzen gleichzeitig mit voller Stärke, die Radarenergie wird dabei auf die gegnerische X-Band-Antenne fokussiert. Am Zielradar steigt dadurch das Hintergrundrauschen an, das Signal-Rausch-Verhältnis verschlechtert sich, die Reichweite sinkt. Ist die verfügbare effektive Strahlungsleistung der eigenen Antenne groß genug, können weitere Signalkeulen zur Luftraumsuche, Zielverfolgung oder Störung gebildet werden. Wird die Burn-Through-Entfernung unterschritten, wird das Breitbandrauschen sinnlos. Ist der Gegner nahe genug am CAPTOR-E, greift der HPM-Modus: Die Radarenergie wird dabei extrem stark auf das Ziel fokussiert, und die Sendefrequenz, die Pulswiederholrate und das Signalmuster dem Ziel angepasst. Die Energie dringt dabei über ein front-door in das Objekt ein, in der Regel der Sucher der Waffe (IR oder Radar), oder über Rückkopplungseffekte der Oberfläche und Öffnungen (back-door). Im Innern bildet sich das ein elektromagnetisches Feld aus, welches – bei der Wahl geeigneter Sendeparameter – mit der Elektronik der Waffe interferiert. Dadurch kommt es zu einer Erhöhung der Bitfehlerrate, und im besten Fall zu Computerabstürzen.[65] Anwendungsmöglichkeiten sind unter anderem die Ablenkung feindlicher Flugkörper und Suppression of Enemy Air Defences.[66] Während die Störsender-Funktion möglichst zeitnah mit Einführung des CAPTOR-E zur Verfügung stehen soll,[67] ist der Einsatz als Energiewaffe erst später geplant.[68]
- High-Speed Datalink / Cyberattack: AESA-Antennen können auch als Richtfunkantennen eingesetzt werden, um Daten mit hoher Datenübertragungsrate zu senden. Das AN/APG-77 kann beispielsweise mit 548 MBit/s senden, und im Gigabit-Bereich empfangen.[69] Da das CAPTOR-E dieselbe Trägerfrequenz verwendet, werden ähnliche Geschwindigkeiten möglich sein. Die Datenübertragungsfunktion soll zeitnah mit Einführung des CAPTOR-E zur Verfügung stehen.[67] Die Verwendung als Cyberwaffe zur Einspeisung von Schadprogrammen ist erst für später geplant.[68] Durch das Suter, welches von BAE Systems entwickelt wurde um feindliche Computernetzwerke und Kommunikationssysteme anzugreifen, liegt bereits Kompetenz und Erfahrung im EuroRADAR-Konsortium vor.
- Bistatic Radar / Space-Based Radar: Die Fähigkeit, Datenpakete zwischen Radaren auszutauschen, ermöglicht es zwei CAPTOR-E als bistatische Radargeräte einzusetzen.[70] Durch die geneigte, drehbare Antennenfläche können die Maschinen während der Zusammenarbeit auf Parallelkurs fliegen. Eine exotische Anwendungsmöglichkeit wäre, einen Satelliten mit X-Band-AESA im Orbit als Sender zu verwenden, und das CAPTOR-E als Passives Radar einzusetzen. Das Prinzip wurde bereits im November 2007 mit dem Satelliten TerraSAR-X nachgewiesen.[41] Das Nachfolgesystem von SAR-Lupe, genannt SARah, soll auch einen Satelliten mit AESA erhalten, welcher auf dem TerraSAR-X und TanDEM-X basiert.[71] Der AESA-Radarprototyp PACER (Phased Array Concepts Evaluation Rig) der DERA, welcher die Entwicklung des AMSAR unterstützen sollte, bestand z. B. nur aus passiven X-Band Empfangsmodulen, und sollte unter anderem die bistatische Anwendung erforschen.[72]
Varianten
ECR-90A
Erster Test an Bord einer modifizierten BAC 1-11 mit Eurofighter-Radarnase. Aufgrund der „Frequency Selective Surface (FSS)“-Materialien im Radom tauchten Störflecken auf. Diese Materialien sorgen dafür dass das Radom für die Frequenzen und die Polarisation des eigenen Radars transparent ist, während andere wegreflektiert oder absorbiert werden.
ECR-90B
Verbessertes Testradar mit von DASA geänderter ECR-90 Antenne an Bord einer modifizierten BAC 1-11 mit Eurofighter-Radarnase. Die Antenne wurde von vertikale auf horizontale Polarisation umgestellt.
AMSAR
Das AMSAR (Airborne Multi-role Solid-state Active array Radar) begann 1993 als Entwicklung zwischen Großbritannien und Frankreich, Deutschland stieß 1995 dazu. Das Ziel war, einen fliegenden AESA-Radar-Demonstrator mit Adaptive Beam Forming (ABF) für Kampfflugzeuge zu entwickeln. Damit sollte die E-Scan-Technologie gereift werden. Der Fokus lag auf Luft-Luft-Betriebsmodi und ECCM, aber auch GMTI.[62]
Das AMSAR bestand aus 1000 T/R-Modulen (TRM) auf GaAs-Basis mit Phasenschiebern und Dämpfungskontrolle, um Phase und Amplitude präzise zu kontrollieren.[62] Die TRM, welche im X-Band arbeiteten, bestanden aus zwei gekreuzten Vivaldi-Antennen, welche um 90° gedreht ineinander steckten. Die legosteingroßen Module von unter 20 mm Länge und etwa 10 mm Höhe und Breite waren aus ULTEM 2200 (20 % Glasfaser, 80 % Polyetherimid), welches an der Oberfläche metallisiert wurde, um das Abstrahlen der vertikal und horizontal polarisierten Radarenergie zu ermöglichen.[73] Die Spitzenleistung der Module betrug mehrere Watt, die Antennenfläche wurde flüssiggekühlt. Die Antennenfläche von 600 mm im Durchmesser und 450 mm in der Tiefe war in acht Sub-Arrays aufgeteilt, um digital adaptive beamforming zu ermöglichen. Die acht Sub-Arrays ließen sich noch digital vierteilen, sodass insgesamt 32 Sub-Arrays erzeugt werden konnten. Damit konnten Sende- und Empfangsmuster, Wellenformen, Updateraten und Interleaving in einem Schwenkbereich von ±60° beliebig kombiniert werden.[62][74]
Nachdem das AMSAR in einer Absorberkammer getestet wurde, folgten Freiversuche ohne Radom. Anschließend folgte der Einbau in die QinetiQ BAC 1-11, und die Testserie begann. Das AMSAR beherrschte nur die Modi Velocity Search und Search and Track mit hohen oder mittleren Pulswiederholraten. Auf dem Militärflugplatz Cazaux folgten Testflüge gegen Falcon 20, Hunter, Mirage 2000 und Alpha Jet. Manche Falcon 20 oder Hunter trugen Störsender, um Haupt- und/oder Nebenkeulen zu stören. Dann wurde das Radar in die Absorberkammer des Centre d’électronique de l’armement (CELAR) verfrachtet, um den Hardware-in-the-Loop-Test BEDYRA (Banc d’Evaluation DYnamique pour Radars et Autodirecteurs électromagnétiques) durchzuführen. Hier wurden die Radarparameter verfeinert, Jammer mapping, Simultaneous multiple Beams Forming on receive und Deterministic nulling getestet, und die Fähigkeit zur Zielverfolgung erprobt. Anschließend folgte wieder der Einbau in die BAC 1-11, und Luft-Luft-Testflüge in Boscombe Down. Die WTD 61 führte STAP/GMTI-Tests mit einem VW Passat durch, der Winkelreflektoren auf dem Dach, und Pyramidenabsorber am Heck besaß. Die finalen Tests fanden wieder in Cazaux statt, wobei Luft-Luft-STAP gegen Bodenclutter getestet wurde, und die Ortung eines Alpha Jet, der von zwei Störsendern gedeckt wurde.[62]
CAESAR
In der Folge starteten Großbritannien und Deutschland das CECAR-Programm. Das CAESAR (Captor Active Electronically Scanned Array Radar) sollte eine schnellstmögliche, robuste und einfache Einbaulösung für die AESA-Technologie im Eurofighter aufzeigen (Plug and Play). Vom Konzept bis zum ersten Testflug vergingen nur 36 Monate. Neben der neuen AESA-Antenne mussten gegenüber dem CAPTOR-C nur die Stromversorgung der Antenne und die Antennensteuereinheit ausgewechselt werden.[75]
Die Antenne bestand aus 1424 GaAs pHemt HPA Sende- und Empfangsmodulen, welche etwa kaugummistreifengroß waren, und mit 64,5 × 13,5 × 4,5 mm ein Volumen von 4 cm³ ausfüllten und je 15 g wogen.[76] Die Module basierten auf dem Standardized Modular Transmit/Receive-Modul (SMTR-Modul) von EADS, welches auch im TerraSAR-X, dem Bodenüberwachungsradar (BÜR) und MEADS verwendet wird.[77] Jedes Modul besaß eingebaute Built-in test equipment. Die Antenne ließ sich in über 30 Sub-Arrays aufteilen. Die Kühlung erfolgte auf der Rückseite durch flüssiggekühlte Platten. Um die gute Wartbarkeit zu demonstrieren, wurde das Radar mehrmals zerlegt und wieder zusammengebaut.[75] Der maximale elektronische Schwenkwinkel wurde ebenfalls untersucht.[78]
Nach der Kalibrierung begannen im November 2005 die Flugtests auf der BAC 1-11. Der erste Flug im Februar 2006 übertraf, ebenso wie alle nachfolgenden Flüge, die Erwartungen. Dabei wurden alle Radarmodi getestet, und die Rohdaten analysiert. Anfang 2007 wurde das CAESAR in das Entwicklungsflugzeug DA5 montiert, um die Kompatibilität zum Waffensystem Typhoon zu zeigen. Anschließend folgten Testflüge gegen Gelegenheitsziele und die Kampfflugzeuge Tornado und Phantom, welche GPS-Pods trugen, um die Radardaten überprüfen zu können. Die Fähigkeit zum TWS Look Back, wo TWS-Ziele begleitet werden während simultan nach neuen Zielen gesucht wird, erwies sich als besonders nützlich.[79] Ende 2007 wurde die Antenne wieder in das BAC 1-11 montiert, um „Advanced Waveforms“ gegen Luft- und Bodenziele zu testen.[75] 2008 wurde damit SAR/MTI und der gleichzeitige Luft-Luft- und Luft-Boden-Einsatz erprobt.[79]
Abschließend begann die Entwicklung der GaN-Modultechnik, und von rumpfkonformen Radarantennen. Unter dem Stichwort „More-than-Radar“ wurde der Einsatz des Radars als Kommunikationsantenne, Störsender (ECM), EloUM zur Radar- und Flugkörperwarnung (ESM) und für Electronic Attack gegen bodengestützte Radare erforscht.[79]
CAPTOR-C
Das CAPTOR-C (früher als ECR-90C bezeichnet) ist das Serienradar der Tranche 1 Flugzeuge. Die Rechenleistung des Radars liegt bei drei Milliarden Instruktionen pro Sekunde.[80] Die Software beinhaltet 1,2 Millionen Zeilen Code. Im Track-while-Scan-Modus liegt die Ortungsreichweite für ein Jagdflugzeug bei etwa 185 km, es können bis zu 20 Ziele verfolgt und 6 gleichzeitig beschossen werden. Im Synthetic-Aperture-Radar-Modus kartografiert das Radar das Gelände mit einer Auflösung von 1 m.[51][60] Das erste Softwareupdate R2P stand ab 2012 zur Verfügung, das Softwareupdate R2Q ab Anfang 2013.
CAPTOR-D
Da die Elektronik des CAPTOR-C obsolet geworden war, wurden für die Tranche 2 Modernisierungsmaßnahmen eingeleitet. Dazu zählen neue Hardware mit modernen PowerPC-Prozessoren und ein neuer Missionscomputer mit höherer Rechenleistung.[81][82] Durch diese Kampfwertsteigerung konnten die EloGM-Fähigkeiten verbessert werden, die Auflösung im SAR-Modus erhöhte sich auf 0,3 m.[51] Das CAPTOR-D verfügt über die vollen Luft-Boden-Eigenschaften (siehe oben), eine Nachrüstung von AESA-Technologie ist möglich. Das Radar wird auch als CAPTOR-M (“M” für mechanisch) bezeichnet. Das erste Softwareupdate T2P stand ab 2012 zur Verfügung, das Softwareupdate T2Q ab Anfang 2013.
CAPTOR-E


Das CAPTOR-E soll die AESA-Technologie in die CAPTOR-Familie einführen. Um den beschränkten Sichtwinkel fester Radarantennen zu umgehen, wird die Antenne mit zwei Taumelscheiben gekippt eingebaut. Durch den Kippwinkel von 40° und die Drehbarkeit in alle Richtungen kann zusammen mit dem elektronischen Schwenkwinkel von 60° ein Suchbereich von ±100° in Elevation und Azimut realisiert werden. Das Back-End wird größtenteils von CAPTOR-M übernommen.[83] Damit soll die F-Pole-Distanz im Luftkampf vergrößert werden.[84] Allerdings steigt das Gewicht des Radars dadurch um 100 kg an.[85]
Die Radarantenne soll wie beim CAESAR aus etwa 1500 TRM bestehen. Für die Prototypen ist aus Kostengründen GaAs-Technik vorgesehen, die Serienversion sollte Module auf GaN-Basis erhalten.[83][31] Im Vorfeld wurden eine Reihe von GaN-Modulentwicklungen in Großbritannien und Deutschland finanziert.[86][87][88] Letztlich entschied man sich aber laut Andrew Cowdery, Vorstandsvorsitzender von EuroRADAR, auf GaAs-Module zu setzen, da die GaN-Technologie noch nicht reif genug sei.[89]
Gemäß Indra Sistemas werden Antenne (LRI #9), Transmitter Auxiliary Unit (TAU) und Antenna Power Supply & Controller (APSC) gegenüber dem CAPTOR-M verschieden sein. Die TAU des CAPTOR-E soll mit 12,75 kVA beschickt werden, sodass nach Verlusten 10,58 kW in die APSC fließen, welche mit über 88 % Wirkungsgrad arbeiten soll.[90] Folglich läge die Ausgangsleistung hier bei über 9,31 kW. Die Kühlung der Komponenten soll beim CAPTOR-E durch Verdampfungskühlung realisiert werden.[90] Die Ortungsreichweite soll bei 59 km gegen eine Lockheed Martin F-35 liegen (Stand 2011).[91]
Nachdem die Entwicklung vom EuroRADAR-Konsortium mit Eigenmitteln vorangetrieben wurde, erklärte sich das britische Verteidigungsministerium 2011 bereit, die CAPTOR-E-Testflüge ab 2013 zu finanzieren.[31] Zumindest die Testradare sollen noch mit einem Trial Interface Processor (TIP) ausgerüstet werden, welcher die Radardaten während des Fluges aufzeichnet. Dazu stehen 240 GB (beliebig um 2×, 4× oder 8× hochrüstbar) Festplattenspeicher mit bis zu 520 MBit/s zur Verfügung, welcher an sechs Glasfaserkabel mit je 1 GBit/s angeschlossen ist.[90] Seit Anfang 2013 wird ein Prototyp des CAPTOR-E in IPA5 eingebaut, der Ende des Jahres fliegen soll.[32] Nach erfolgreichen Tests und somit Abschluss der Entwicklung erfolgt ab 2019 die Serienauslieferung von Hensoldt nach UK.[92]
Von diesem Radar gibt es mehrere Baureihen:
- Mk.0, Basisvariante, die zunächst für Exportkunden entwickelt wurde.
- Mk.1, Variante für Deutschland und Spanien, die unter Federführung von Hensoldt entwickelt wird
- Mk.2, Variante für die britische Royal Air Force, die unter Federführung von Leonardo entwickelt wird[93]
Tabelle
| Name | Antenne | Energieerzeugung | Pulsleistung | Reichweiteb | TWS-Ziele / Feuerleitkanäle | Systemgewicht |
|---|---|---|---|---|---|---|
| Prototypen | ||||||
| ECR-90A | Planare Antennea | Coupled-cavity Wanderfeldröhre | ~9 kWc | 0 km | 20 / 6 | N/A |
| ECR-90B | Planare CFK-Antenne | Coupled-cavity Wanderfeldröhre | ~9 kWc | 185 km | 20 / 6 | 193 kg |
| AMSAR | Aktive Phased-Array-Antenne | 1000 GaAs TSA à >5 W | > 5 kW | (150 km) | N/A | N/A |
| CAESAR | Aktive Phased-Array-Antenne | 1424 GaAs pHemt HPA à 10 W | 14,2 kW | (200+ km) | 20 / 6 | N/A |
| Serienmodelle | ||||||
| CAPTOR-C | Planare CFK-Antenne | Coupled-cavity Wanderfeldröhre | ~9 kWc | 185 km | 20 / 6 | 193 kg |
| CAPTOR-D | Planare CFK-Antenne | Coupled-cavity Wanderfeldröhre | ~9 kWc | 185 km | N/A | 193 kg |
| CAPTOR-E | Aktive Phased-Array-Antenne | 1300–1500 GaAs TRM | N/A | 394 kmd | N/A | 293 kg |
Weblinks
Einzelnachweise
- flightglobal: Radars look down on Paris, 16. Juni 1985
- flightglobal: Five study EFA radar, 29. Juni 1985 (PDF; 131 kB)
- flightglobal: France seeks EFA radar share, 4. April 1987
- flightglobal: EFA radar battle: new versus now, 6. September 1986 (PDF; 2,4 MB)
- flightglobal: Teams try again on EFA radar, 30. Januar 1988
- flightglobal: EFA radar: heads or tails, the UK loses, 19. März 1988
- flightglobal: US hampers EFA radar bid, 28. Mai 1988 (PDF; 2,3 MB)
- flightglobal: EFA radar transfer agreed, 27. August 1988 (PDF; 2,2 MB)
- flightglobal: EFA radar choice nears, 22. Oktober 1988 (PDF; 285 kB)
- flightglobal: EFA – UK looks at three-nation radar, 7. Oktober 1989 (PDF; 1,3 MB)
- flightglobal: Ferranti rival in talks to join ECR-90 project, 6-12. Dezember 1989
- flightglobal: Ferranti take-over cuts UK MoD options, 6. Februar 1990
- flightglobal: Ericsson ousted from EFA radar, 24. Juli 1990
- aerospaceweb: F-16 IFF „Bird Slicer“ Antennas, abgerufen am 26. Juli 2013.
- AAMSI: AN/APX-109 Combined Interrogator & Transponder (PDF; 1,2 MB), abgerufen am 26. Juli 2013.
- John J. Hopner: A CASE STUDY OF THE NATO IDENTIFICATION SYSTEM (NIS) CODEVELOPMENT PROGRAM, September 1988 (PDF; 3,3 MB)
- Forschungsinstitut für Hochfrequenzphysik: NON-COOPERATIVE AIR TARGET IDENTIFICATION BY RADAR, RTO SCI Symposiumon “Non-Cooperative Air Target Identification Using Radar”, Mannheim, Germany, 22-24 April 1998 (Memento des Originals vom 10. Juni 2015 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- NATO RTO Task Group: Countermeasures to Imaging Radars (SCI-066) , abgerufen am 26. Juli 2013.
- Eurofighter Jagdflugzeug GmbH: THE EUROPEAN FIGHTER AIRCRAFT EF2000 FLIGHT TEST PROGRAMME OVERVIEW AND MANAGEMENT CONCEPT, AGARD FVP Symposium on “Advances in Flight Testing”, Lissabon, 23-26. September 1996 (Memento des Originals vom 4. November 2014 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- flightglobal: DASA modifies antenna to cure EF2000's radar, 29. Mai 1996
- flightglobal: GEC demonstrates the ECR 90 to Eurofighter nations, 2. bis 8. Oktober 1996
- FLIGHT INTERNATIONAL: EFA warms to Rafale IRST, 12-18. September 1990
- flightglobal: TARGETING TOMORROW , 5-11. Juni 1991
- flightglobal: DASA ready to join GTAR radar partners, 3. Mai 1995
- flightglobal: RAF aims for multiple arrays, 1996
- flightglobal: Fighting for a foothold, 18. Juli 2000
- Eurofighter GmbH – German Air Force take Delivery of First Series Production Eurofighter (Memento des Originals vom 19. März 2012 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- Airpower.at: Ein neues Radar für den Eurofighter, 2006
- Flug Revue: Eurofighter: Industrie startet AESA-Radarentwicklung, 20. Juli 2010
- DefenseNews – Industry Fronts Money for Typhoon Radar R&D (Seite nicht mehr abrufbar, Suche in Webarchiven) Info: Der Link wurde automatisch als defekt markiert. Bitte prüfe den Link gemäß Anleitung und entferne dann diesen Hinweis.
- AIN online: Eurofighter Nations Inch Closer to New Radar Commitment, 13. Juni 2011
- Flightglobal: PICTURE: AESA radar clears trial fit with Eurofighter, 13. Juni 2013
- Flightglobal: BAE advances Captor-E radar integration on Typhoon, 6. März 2014
- Flightglobal: FARNBOROUGH: Eurofighter gets AESA programme boost, 16. Juli 2014
- Handelsblatt: Deutschland entwickelt Eurofighter-Radar mit, 13. November 2014
- FlugRevue: Entwicklungsvertrag für Captor-E-Radar unterzeichnet , 19. November 2014
- flightglobal: First Brazo firing , 16. Mai 1974
- flightglobal: Hughes Brazo, 29. Mai 1976
- MICHAEL FABEY / DefenseNews: JSF-Raptor Radar Can Fry Enemy Sensors, 30. Mai 2005.
- Avionics Today: Radar Transmitting Data, 1. August 2006
- Rodriguez-Cassola, V. Baumgartner, Krieger: Bistatic TerraSAR-X/F-SAR Spaceborne–Airborne SAR Experiment: Description, Data Processing, and Results, IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 48, NO. 2, Februar 2010 (PDF; 3,0 MB)
- breaking defense: Beyond F-35: Rep. Forbes & Adm. Greenert on Cyber, Drones & Carriers, 29. April 2013
- Fulghum, David A / Aviationweek: U.S. Navy Wants To Field Cyber-Attack System, 31 March 2010.
- IEEE Spectrum: The Hunt for the Kill Switch, 1. Mai 2008
- DARPA: Trusted Integrated Circuits (TRUST) (Memento des Originals vom 22. Juli 2013 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis., abgerufen am 20. Juli 2013.
- The Register: Israel suspected of 'hacking' Syrian air defences, 4. Oktober 2007
- http://www.janes.com/articles/Janes-Avionics/Captor-Radar-International.html
- Flightglobal: Eurofighter avionics: how advanced?, 4. Oktober 1986
- Aviation Today: Avionics Crown Typhoon Performance, 1. August 2006
- Avionics Magazin: Typhoon: Europe’s Finest (Memento vom 27. April 2010 im Internet Archive), 1. Juni 2003
- starstreak.net: Sensors (Memento des Originals vom 27. November 2014 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis., abgerufen am 26. Juli 2013.
- RAeng: BAE Systems Sensor Systems Division for their CAPTOR Radar for the Eurofighter, 2000 Finalist
- Prof. John F. Roulston: Cost Drivers in Airborne Fighter Radar Programmes, The Future of Radar in the UK and Europe (Ref. No. 1999/186), IEE Workshop, 1999.
- Truppendienst – Radar und Selbstschutz
- Heiko Seidel; Christoph Stahl; Frode Bjerkeli; Paal Skaaren-Fystro: Assessment of COTS IR image simulation tools for ATR development, 19. Mai 2005; SPIE doi:10.1117/12.602461.
- F. Benedetto, F. Riganti Fulginei, A. Laudani, G. Albanese: Automatic Aircraft Target Recognition by ISAR Image Processing based on Neural Classifier, (IJACSA) International Journal of Advanced Computer Science and Applications, Vol. 3, No.8, 2012 (PDF; 568 kB)
- Airpower.at: Precision Targeting – EADS entwickelt automatische Präzisionszielerfassung für Eurofighter, 2004
- EADS: Generation of Synthetic SAR Imagery for ATR Development, RTO-MP-SET-096, 2005
- NATO RTO: Target Identification and Recognition using RF Systems, MP-SET-080, Oktober 2004 (Memento des Originals vom 10. Juni 2015 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- airpower.at: Das „Captor“ Radar, abgerufen am 26. Juli 2013.
- Radartutorial: Space-Time Adaptive Processing (STAP), abgerufen am 22. Juli 2013.
- Milin, Moore, Bürger, Triboulloy, Royden, Gerster: AMSAR – A EUROPEAN SUCCESS STORY IN AESA RADAR, Radar Conference – Surveillance for a Safer World, 12-16. Oktober 2009.
- Prof. John Roulston / Filtronic, BAE Systems: Future developments in Airborne Radar, Institution of Electrical Engineers 2006.
- Wolfgang Holpp / EADS: The New Generation of European E-Scan Fighter Radars, Microwave Symposium Digest (MTT) / 2010 IEEE MTT-S International, 23-28. Mai 2010.
- Diverses, z. B. WIS u. a.: Susceptability of Some Electronic Equipment to HPEM Threats (PDF; 1,1 MB) oder University of Illinois u. a.: Analysis and design of ultra wide-band and high-power microwave pulse interactions with electronic circuits and systems (PDF; 4,2 MB)
- AGARD / Nitsch u. a.: High-Power Microwaves Effects on Smart Electronic Weapon Systems, 14-17. April 1997
- PANORAMA DIFESA: Typhoon continua a crescere, GIUGNO 2013.
- Eurofighter World: WHAT IS A 5TH GENERATION FIGHTER?, 2/2010 (Memento des Originals vom 2. November 2012 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis. (PDF; 773 kB)
- The Register: F-22 superjets could act as flying Wi-Fi hotspots, 19. Juni 2007
- EuroRADAR: CAPTOR-E (PDF; 531 kB), abgerufen am 25. Juli 2013.
- OHB System: OHB System AG erhält Auftrag für Entwicklung und Bau des Radarsatelliten-Aufklärungssystems SARah für die deutsche Bundeswehr, 2. Juli 2013 (Memento des Originals vom 4. Mai 2014 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- DERA / Richardson u. a.: PACER (Phased Array Concepts Evaluation Rig): Design, Development and Adaptive Beamforming Experiments, IEEE International Conference on Phased Array Systems and Technology, 2000.
- Eugen Arnold / Daimler Chrysler Aerospace AG: A Radiating Element for an Active Airborne Antenna, Antennas and Propagation Society International Symposium, 1999.
- Uhlmann u. a.: DESIGN CHARACTERISTICS OF THE AMSAR AIRBORNE PHASED ARRAY ANTENNA, IEE Colloquium on Electronic Beam Steering (Ref. No. 1998/481), 28. Oktober 1998.
- Barclay / Selex Sensors u. a.: CAESAR: DEMONSTRATING AESA CAPABILITY OPTION FOR EUROFIGHTER CAPTOR RADAR, IET International Conference on Radar Systems, 2007.
- Airpower.at: Ein neues Radar für den Eurofighter, 2006
- Lörcher et al./ EADS Deutschland: ADVANCED RF SENSORS FOR SAR EARTH OBSERVATION USING HIGH PRECISION T/R-MODULES, 3rd International Asia-Pacific Conference on Synthetic Aperture Radar (APSAR), 26-30 Sept. 2011, p 1-6
- Barclay / Selex Galileo u. a.: AESA Upgrade Option For Eurofighter CAPTOR Radar, IEEE Radar Conference, 2008.
- Holpp / EADS Deutschland: The New Generation of European E-Scan Fighter Radars, Microwave Symposium Digest (MTT), 2010.
- Eurofighter Typhoon – Werkstoffe, Aerodynamik, Flugsteuerung
- https://www.flightglobal.com/news/articles/details-of-typhoon-enhancements-revealed-213879/
- airpower.at – Eurofighter im Steigflug
- AIN online: Latest-tech E-scan radar to fly on Typhoon in 2013, 21. Juli 2010
- AIN online: Selex Galileo Leads Europe’s E-Scan Drive, 9. Juli 2012
- Aerospace Insight Blog: Typhoon – the best is yet to come, 8. März 2013 (Memento des Originals vom 23. Oktober 2013 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- EADS Deutschland uvm. / Schu u. a.: GaN MMIC based T/R-Module Front-End for X-Band Applications, European Microwave Integrated Circuit Conference, 2008.
- EADS Deutschland uvm. / Schu u. a.: 20W GaN HPAs for Next Generation X-Band T/R-Modules, International Microwave Symposium Digest, 2006.
- Selex Sistemi Integrati / Bettidi u. a.: INNOVATIVE T/R MODULE IN STATE-OF-THE-ART GAN TECHNOLOGY, IEEE Radar Conference, 2008.
- AviationWeek: Covers Off Eurofighter E-Scan Radar, 16. Juli 2014
- Indra: EUROFIGHTER PROGRAM – RETOS TECNOLÓGICOS ACTUALES, 21-22 Mai 2009 (Memento des Originals vom 29. November 2014 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis. (PDF; 638 kB)
- Korea Times: F-35: a game changer in modern warfare, 24. Oktober 2011
- Waldemar Geiger: Produktionsbeginn Eurofighter-Radar Captor-E. In: ESUT - Europäische Sicherheit & Technik. 6. Februar 2019, abgerufen am 15. März 2020 (deutsch).
- UK funds integration of AESA radar upgrade for Typhoon. Janes, 3. September 2020
- Norman Friedman: The Naval Institute Guide to World Naval Weapons Systems, 1997–1998, U S Naval Inst Pr (Mai 1997), ISBN 1-55750-268-4.