Generalisierte Koordinate
Die generalisierten (oder verallgemeinerten) Koordinaten bilden in der theoretischen Mechanik und der technischen Mechanik einen minimalen Satz von unabhängigen Koordinaten zur eindeutigen Beschreibung des räumlichen Zustands des betrachteten Systems. Sie werden so gewählt, dass die mathematische Formulierung von Bewegungen, die Zwangsbedingungen unterliegen, möglichst einfach wird.[1] Als Variablen tragen generalisierte Koordinaten oft das Formelzeichen .

Z. B. genügt beim mathematischen Pendel statt der x- und z-Koordinate des Massenpunkts die Angabe des Auslenkwinkels, um die Lage eindeutig zu beschreiben. Die konstante Seillänge ist durch die Bindungsgleichung gegeben.

Die Anzahl der generalisierten Koordinaten, die zur Beschreibung eines Systems mindestens erforderlich sind, stimmt mit der Anzahl seiner Freiheitsgrade überein. Die generalisierten Koordinaten spannen den Konfigurationsraum auf. Wichtige Beispiele sind die Wirkungs-Winkelkoordinaten, die Jacobi-Koordinaten und die (allesamt zyklischen) Koordinaten des Hamilton-Jacobi-Formalismus.[2]
Beispiel
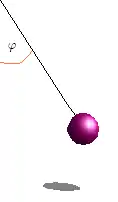

Die Masse des ebenen mathematischen Pendels in der x-y-Ebene kann sich bei konstanter Seillänge (skleronom-holonome Zwangsbedingung) nur auf einer Kreisbahn bewegen, der Winkel ist der einzige Freiheitsgrad der Bewegung. Die Position der Pendelmasse lässt sich somit eindeutig durch die generalisierte Koordinate beschreiben:


Fasst man das Problem als dreidimensional auf, so hat man zusätzlich die Zwangsbedingung des ebenen Pendels zu berücksichtigen:


Alle weiteren Größen der Bewegung wie Geschwindigkeit oder Beschleunigung lassen sich ebenfalls in Abhängigkeit von der verallgemeinerten Koordinate ausdrücken.
Die Bewegungsgleichungen lassen sich stets nach den zweiten zeitlichen Ableitungen der verallgemeinerten Koordinaten auflösen, im Beispiel erhält man eine Differentialgleichung zweiter Ordnung für den Winkel .
Einzelnachweise
- Friedhelm Kuypers: Klassische Mechanik. 5. Auflage. VCH, 1997, ISBN 3-527-29269-1
- Herbert Goldstein: Classical Mechanics. 2. Auflage. Addison-Wesley, 1980, ISBN 0-201-02918-9 (englisch).