Sechs Freiheitsgrade
Die sechs Freiheitsgrade, englisch six degrees of freedom (6DoF), beziehen sich auf die Bewegungsfreiheit eines starren Körpers im dreidimensionalen Raum.
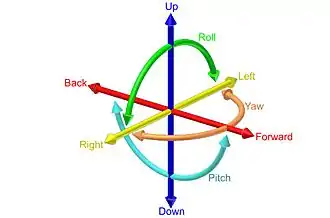
Ein Körper mit Bewegungsfreiheit in sechs Freiheitsgraden kann seine Position, durch Translationen entlang der drei lotrechten Achsen vor/zurück, hinauf/hinunter und links/rechts, kombiniert mit Veränderungen der Orientierung durch Rotationen um die drei lotrechten Achsen, bezeichnet als rollen (Rotation um die Längsachse), nicken (Rotation um die Querachse) und gieren (Rotation um die Hochachse), frei verändern.
Robotik
Serielle und parallele Kinematiken von Maschinen werden normalerweise entworfen, um einen Endeffektor mit sechs Freiheitsgraden, welche aus drei Translationen und drei Rotationen bestehen, zu positionieren. Das ermöglicht eine direkte Beziehung zwischen den Positionen von Aktoren und der Konfigurationen der Maschine durch ihre direkte und inverse Kinematik. Zur Positions- und Lagebestimmung, eines oder mehrere Systeme werden Referenzmarken (Tag z. B. AprilTag[1]) verwendet
Arme von Robotern werden durch ihre Freiheitsgrade beschrieben. Diese Zahl bezieht sich normalerweise auf die Anzahl der einachsigen Drehgelenke im Arm, wobei eine höhere Anzahl eine erhöhte Flexibilität bei der Positionierung eines Werkzeuges ergibt. Das ist eine praktische Methode, im Gegensatz zu der abstrakten Definition von Freiheitsgraden, die die Fähigkeit der Positionierung eines Systems misst.[2]
2007 hat der Erfinder von Segway, Dean Kamen, einen Prototyp eines Roboterarms[3] mit 14 Freiheitsgraden für DARPA vorgestellt. Humanoide Roboter haben normalerweise 30 oder mehr Freiheitsgrade, wobei jeder Arm sechs Freiheitsgrade, jeder Fuß fünf oder sechs und der Rumpf und Hals noch einige weitere Freiheitsgrade besitzen.[4]
Technik
Der Begriff ist wichtig zur Analyse und Messung von Eigenschaften von mechanischen Systemen, insbesondere biomechanischen Systemen, die alle sechs Freiheitsgrade berücksichtigen müssen. Die Messung der sechs Freiheitsgrade erfolgt heute über magnetische oder elektromagnetische Sensoren, welche die Positions- und Winkeldaten an eine Verarbeitungseinheit übertragen.
Ein Beispiel für die Bewegung mit sechs Freiheitsgraden ist die Bewegung eines Schiffes auf See. Sie kann beschrieben werden als:[5]
Translation:
- Vorwärts- und Rückwärtsbewegung entlang der X-Achse bzw. Längsachse („Schnellen“).
- Links- und Rechtsbewegung entlang der Y-Achse bzw. Querachse („Schwojen“).
- Auf- und Abbewegung entlang der Z-Achse bzw. Hochachse („Tauchen“).
Rotation:
Betriebsarten
Es gibt drei Betriebsarten der sechs Freiheitsgrade. Diese Arten sind Direkt, Semi-direkt (bedingt) und Nicht-direkt, unabhängig von der Zeit, die für die Ausführung des Manövers verbleibt, der Energie, die übrig bleibt, um das Manöver auszuführen, und schließlich, unabhängig davon, ob die Bewegung über eine biologische Einheit (Mensch) oder eine Robotereinheit (Computer) befohlen wurde.
- Direkt: Ein Freiheitsgrad kann direkt gesteuert werden, ohne besondere Bedingungen zu erfüllen. Es kann als normale Operation beschrieben werden. (Ein Querruder bei einem normalen Flugzeug)
- Semi-direkt: Ein Freiheitsgrad kann dann gesteuert werden, wenn besondere Bedingungen erfüllt werden. (Schubumkehr eines Flugzeuges)
- Nicht-direkt: Ein Freiheitsgrad kann nur über die Interaktion mit seiner Umgebung gesteuert werden (Nick Bewegung eines Bootes im Wasser).
Auch Kombinationen dieser Arten existieren bei manchen Fahrzeugen. Ein Beispiel das Space Shuttle, wenn es sich im Weltraum bewegt. Die Bewegung kann über alle sechs Freiheitsgrade gesteuert werden. Befindet sich das Space Shuttle bei seiner Rückkehr jedoch in der Erdatmosphäre, können aus technischen Gründen nicht alle sechs Freiheitsgrade direkt angesteuert werden.
Spielsteuerungen
Die sechs Freiheitsgrade beziehen sich auch auf Bewegungen in Videospielen.
Ego-Shooter Spiele ermöglichen normalerweise fünf Freiheitsgrade: vor/zurück, links/rechts, rauf/runter, gieren (links/rechts Drehung) und nicken (rauf/runter schauen). Wenn ein Spiel eine Kontrolle der Neigung erlaubt, wird es manchmal mit einer Bewegungsfreiheit von sechs Freiheitsgraden beschrieben. Das ist jedoch nicht ganz korrekt, da diese Neigung nur eine beschränkte Rotation ist.
Die Bezeichnung 6Dof wird manchmal verwendet um Spiele zu beschreiben, welche eine freie Bewegung erlauben, aber nicht unbedingt alle Kriterien der sechs Freiheitsgrade erfüllen. Spiele, die freie Bewegung erlauben, sind z. B. Dead Space 2 und in geringerem Ausmaß Homeworld.
Beispiele für Spiele mit kompletter Steuerung der sechs Freiheitsgrade sind u. a. Shattered Horizon, Descent, Retrovirus, Miner Wars, Space Engineers, Forsaken, Overload und Vendetta Online.
Geräte zur Verfolgung von Bewegungen (Tracking), wie TrackIR[6] werden verwendet für Head-Tracking sechs Freiheitsgrade. Dieses Gerät wird oft bei Flugsimulatoren oder Simulatoren von anderen Fahrzeugen verwendet, um durchs Cockpit zu sehen, wodurch Gegner lokalisiert oder Unfälle im Spiel vermieden werden können.
Der Razer Hydra[7] ist ein Kontroller für den PC, der die Position und Rotation von zwei verkabelten Nunchuks verfolgt, der die sechs Freiheitsgrade an jeder Hand ermöglicht.
Der SpaceOrb 360 ist ein Computer-Eingabegerät mit sechs Freiheitsgraden, welcher 1996 erstmals von der SpaceTec IMC company produziert wurde.
Einzelnachweise
- John Wang, Edwin Olson: AprilTag 2: Efficient and robust fiducial detection. In: 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 9. Oktober 2016, S. 4193–4198, doi:10.1109/IROS.2016.7759617 (ieee.org [abgerufen am 24. April 2021]).
- Richard P. Paul: Robot Manipulators: Mathematics, Programming, and Control. MIT Press, 1981.
- Dean Kamen: Transcript of "Dean Kamen stellt eine neue Armprothese vor". Abgerufen am 7. Mai 2017.
- John J. Craig: Introduction to Robotics: Mechanics and Control. Addison-Wesley, 1986.
- Schiffsbewegungen - Wassersportlexikon. Abgerufen am 7. Mai 2017.
- TrackIR. Abgerufen am 7. Mai 2017.
- Razer Hydra Portal 2 Bundle Gaming Controller - PC Motion Sensor - Razer Deutschland. (Nicht mehr online verfügbar.) Archiviert vom Original am 3. Januar 2017; abgerufen am 7. Mai 2017. Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.