Kinematische Kette
Kinematische Kette (englisch: kinematic chain) ist ein abstrakter Begriff aus der Getriebetechnik.[1][2][3] Die kinematische Kette „zeigt nur den strukturellen Zusammenhang der Glieder und gibt keinerlei Hinweise auf die Gliederfunktion. […] Aus einer kinematischen Kette entsteht ein Getriebe, wenn man ein Glied zum Gestell und ein oder mehrere Glieder zu Antriebsglied macht.“[3] Ein kinematisches Schema ist das Ergebnis eines ersten Abstraktionsschrittes von einem realen Getriebe zur kinematischen Kette. Es ist „die Strukturdarstellung eine Getriebes, das dessen für die Bewegung wesentlichen Teile, also Glieder, Gelenke und Organe, vereinfacht und ohne konstruktive Gestalt […] zeigt.“[4]

Foto: reales Getriebe
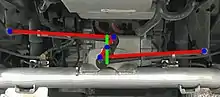
rot/blau: Abstraktion zum kinematischen Schema
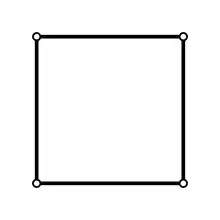
Die zur weiteren Abstraktion viergliedrige geschlossene kinematische Kette (s. folgendes Bild) fehlende Gerade ist die Verbindung zwischen den beiden am Fahrzeugaufbau festen Gelenken.
Die Darstellung der Kette besteht aus
- Symbolen für die Glieder des Getriebes (z. B. Geraden) und
- verbindenden kleinen Kreisen als Symbole für die bewegliche Kopplung zwischen je zwei Gliedern. Der Freiheitsgrad f der Gelenke wird bei f > 1 praktischerweise am Symbol vermerkt.[Anm. 1]
Beim in nebenstehenden Bildern gezeigten Watt-Gestänge – ein viergliedriges Koppelgetriebe – ist die Abstraktion vom realen Getriebe (erstes Bild) zur ebenfalls viergliedrigen kinematischen Kette (drittes Bild) leicht nachvollziehbar. Die abstrakte Zwischenstufe kinematisches Schema (zweites Bild: 1 Gestell, 3 bewegte Glieder in realer Länge als rote Geraden und 5 Gelenke[Anm. 2] als blaue Punkte) ist lediglich durch ein Viereck[Anm. 3] mit kleinen Kreisen auf den Ecken zu ersetzen.
Die Abstraktion zur kinematischen Kette führt immer zu einem Bild in der Ebene, auch wenn es sich um komplexe, in Schleifen unterteilte Ketten[5] handelt, wie sie in der Fahrwerkstechnik z. B. bei der Fünflenkerradaufhängung anzutreffen sind.
„Notwendige Voraussetzung für eine erfüllte Getriebestruktur“ ist, „dass Gliedergruppen geschlossene Polygone bilden“, dass also eine geschlossene kinematische Kette vorliegt. „Bei manchen … Problemstellungen … wie Industrierobotern und Manipulatoren mit ihren Greifern … ist es aber vorteilhaft, Betrachtungen an offenen kinematischen Ketten anzustellen.“[6]
Weiterer Gebrauch des Begriffs Kinematische Kette
Bei Robotergreifarmen und ähnlichen technischen Geräten wie z. B. Baggerarmen wird der Begriff offene kinematische Kette angewendet.[7] Gleich wie in der allgemeinen Getriebetechnik ist, dass i. d. R. je zwei feste Körper zu einer Kette kinematisch eindeutig miteinander verbunden sind, meistens mit einem Gelenk mit Freiheitsgrad f=1. Unterschiedlich ist, dass die offene Kette nicht zwangläufig ist. Der Zwanglauf wird nicht mit nur einem Antrieb erreicht, sondern es ist in jedem Gelenk ein individueller Antrieb erforderlich. Damit wird an jeder Verbindungsstelle je ein Getriebe mit jeweils geschlossener kinematischer Kette beigefügt.
Die Begriffe Geschlossene kinematische Kette und Offene kinematische Kette werden auch in der Biomechanik des menschlichen Körpers gebraucht. Sie helfen gleich wie in der Getriebetechnik bei der Analyse der Kinematik und der Kinetik von aneinander hängenden Gliedern, wobei es sich hier mehrheitlich um die einzelnen Glieder der Arme und Beine und deren Bewegungsmechanik handelt.[8]
Anmerkungen
- In der Fahrwerkstechnik werden Gelenke mit f > 1 durch virtuelle Glieder ersetzt, die mit f = 1 - Gelenken verbunden sind; vgl. Schramm u. a.: Modellbildung und Simulation der Dynamik von Kraftfahrzeugen.
- Das Gelenk in der Mitte des kurzen Gliedes (der Koppel) gehört nicht dazu. Das Watt-Gestänge ist hier gelenkig mit der Starrachse verbunden und führt diesen Punkt der Achse am Fahrzeugaufbau annähernd auf einer vertikalen Bahn.
- Die kinematische Kette darf relativ beliebig gezeichnet werden, vorzugsweise aber als regelmäßiges Polygon (im vorliegenden Fall als Quadrat).
Einzelnachweise
- Franz Reuleaux: Theory of Machines. Macmillan & Co, London 1876 (eingeschränkte Vorschau in der Google-Buchsuche).
- Johannes Volmer: Getriebetechnik - Grundlagen. 1. Auflage. Technik, Berlin 1968, ISBN 3-322-93799-2 (eingeschränkte Vorschau in der Google-Buchsuche).
- Kurt Luck, K.-H. Modler: Getriebetechnik. 1. Auflage. Springer, Wien - New York 1990, ISBN 3-211-82147-3 (eingeschränkte Vorschau in der Google-Buchsuche).
- Johannes Volmer, 2. Auflage, 1995, Seite 37
- Dieter Schramm, Manfred Hiller, Roberto Bardini: Modellbildung und Simulation der Dynamik von Kraftfahrzeugen. 3. Auflage. Springer Vieweg, 2018, ISBN 978-3-662-54480-8 (eingeschränkte Vorschau in der Google-Buchsuche).
- Johannes Volmer, 2. Auflage, 1995, Seite 44
- link.springer: „Den kinematischen Aufbau eines Roboters idealisiert man nach VDI-2861 als sog. offene kinematische Kette.“
- Lexikon sportwissenschaftlicher Begriffe: Kette kinematische