Roll-Nick-Gier-Winkel
Roll-Nick-Gier-Winkel, englisch roll-pitch-yaw angle, sind spezielle Eulerwinkel (Lagewinkel), die zur Beschreibung der Ausrichtung eines Fahrzeugs im dreidimensionalen Raum herangezogen werden. Diese Art der Richtungsmessung und -bestimmung durch Drehratensensoren wurde zur Navigation im Luftverkehr eingeführt und wird inzwischen neben Luftfahrzeugen auch für Raum-, Land- und Wasserfahrzeuge verwendet.

Details
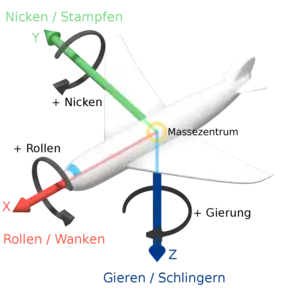
Die aus der Flugsteuerung übernommenen Winkel beschreiben drei aufeinander folgende Drehungen, die ein festes Referenzsystem (engl. world-frame) in ein objektbezogenes rechtshändiges Koordinatensystem (engl. body frame) überführen. Dessen Ursprung denkt man sich im Mittelpunkt des Fahrzeugs, wobei die Winkelbezeichnungen sich unmittelbar aus den Namen der drei möglichen Drehbewegungen des Fahrzeugs um seine Körperachsen ableiten (siehe Abb. rechts). Zu Beginn der Drehungen stimmen Referenzsystem und körperfestes System überein.
- Rollen (engl. roll): Drehung um die in Längsrichtung des Fahrzeugs verlaufende -Achse (Roll-, Wank- oder Längsachse). Für den Querneigungswinkel wird dabei auch die Bezeichnung banking gebraucht.
- Nicken (engl. pitch, selten auch nick): Drehung um die -Achse des Fahrzeugs (Nick- oder Querachse).
- Gieren (engl. yaw): Drehung um die -Achse des Referenzsystems (Gier-, Hoch- oder Vertikalachse). Für den Richtungswinkel werden dabei mitunter auch die Bezeichnungen heading oder Azimut gebraucht.



Übereinstimmend zeigt dabei allerdings nur die positive -Achse (engl. roll axis) stets, d. h. sowohl bei Raum-, Luft-, Wasser- und Landfahrzeugen, nach vorn. Für die positive - und -Richtung des Objektsystems (body frame) dagegen gibt es je nachdem, welches externe Koordinatensystem (engl. world frame) als Bezugsystem genutzt wird, zwei unterschiedliche Konventionen:
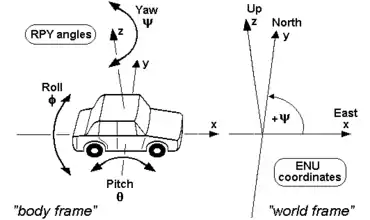
- Bei Landfahrzeugen, die das ENU-System (East-North-Up) als Bezugssystem verwenden, zeigt die positive y-Achse (engl. pitch axis) stets nach links bzw. Backbord und die senkrecht auf der xy-Ebene des Fahrzeugs stehende positive -Achse (engl. yaw axis) stets nach oben.[1]
- Bei Raum-, Luft- und Wasserfahrzeugen einschließlich U-Booten dagegen, die aus Gründen der Kompatibilität zur traditionellen Kompassrichtung weiter das NED-System (North-East-Down) als Bezugssystem nutzen, zeigt die positive -Achse (engl. pitch axis) stets in Richtung der rechten Tragfläche bzw. nach Steuerbord und die senkrecht auf der -Ebene des Fahrzeugs stehende positive -Achse (engl. yaw axis) stets nach unten.

Was „unten“ ist, wird dabei allerdings bei Raumfahrzeugen wie Raumfähren oder Satelliten etwas anders definiert als bei Flugzeugen und Schiffen:[2][3][4] Je nach Zielstellung des Fluges verwenden Raumfahrzeuge statt eines der beiden obengenannten externen Koordinatensysteme entweder ein an der aktuellen Flugbahn orientiertes sogen. lokales Bezugssystem (engl. local frame) oder ein sich am Sternbild Widder und dessen Frühlingspunkt (engl. vernal equinox) sowie an der Nord-Süd-Achse der Erde orientierendes sogen. Inertialsystem (engl. inertial frame):
Geht es darum, das Raumfahrzeug, z. B. eine Raumfähre, bei seinen Erdumkreisungen in einer möglichst gleichbleibenden Lage hinsichtlich des Himmelszelts zu halten, etwa, um bestimmte astronomische Untersuchungen durchzuführen, wird als Bezugssystem vorzugsweise das Inertialsystem benutzt, bei dem die RPY-Winkel (0|0|0) eine Lage der Raumfähre beschreiben, in der diese mit ihren Flügeln parallel zum Erdäquator, dem Bug in Richtung Frühlingspunkt sowie dem Bauch in Richtung Polarstern zeigend die Erde umkreist.[5]
Geht es dagegen darum, die Raumfähre bei ihren Erdumkreisungen in möglichst gleichbleibender Lage hinsichtlich der Erdoberfläche zu halten, etwa um bestimmte erdbezogene Untersuchungen durchzuführen, wird stattdessen als Bezugssystem vorzugsweise das lokale Bezugssystem benutzt, bei dem die RPY-Winkel (0|0|0) eine Lage der Raumfähre beschreiben, in der diese wie ein Flugzeug mit den Flügeln parallel zur Erdoberfläche, dem Bug nach vorn und dem Bauch zum Erdmittelpunkt zeigend die Erde umkreist.[6]
Auch bei dreiachsenstabilisierten Satelliten, wie sie die Erde z. B. als Kommunikationssatelliten mit fester Ausrichtung auf die Erde umkreisen, hat sich inzwischen für Drehwinkel und -achsen der eben beschriebene Sprachgebrauch eingebürgert. So weist in diesem Fall die positive -Achse des Satelliten – wie bei der Verwendung eines lokalen Bezugssystems durch eine Raumfähre (s. o.) – in Richtung seiner Flugbahn um die Erde, während die auf den Erdmittelpunkt ausgerichteten Antennen des Satelliten damit in Richtung seiner positiven z-Achse zeigen und schließlich seine Sonnenkollektoren sich um die auf beiden Achsen senkrecht stehende -Achse drehen (siehe Abb.).
Da Drehungen des Satelliten um seine z-Achse dabei nur geringen Einfluss auf die Orientierung seiner Antennen in Bezug auf die Erde haben, kann die Lageregelung der z-Achse mit einer größeren Toleranz arbeiten als die der beiden anderen Achsen: Typische Werte für den Gierwinkel (engl. yaw) sind ±0,15°, für den Roll- und Nickwinkel (engl. roll und pitch) dagegen nur ±0,05°.
In der Robotik werden Roll-Pitch-Yaw-Winkel zur Beschreibung von Orientierungen (des Werkzeugs oder anderer Objekte), bezogen auf eine raumfeste Basis, verwendet.
In der Aerodynamik schließlich wird Begriff Pitch – abweichend von der obigen Systematik – auch für den Anstellwinkel eines Propellers oder Rotors verwendet, siehe Pitch (Aerodynamik).
 RPY-Winkel von Autos und anderen Landfahrzeugen
RPY-Winkel von Autos und anderen Landfahrzeugen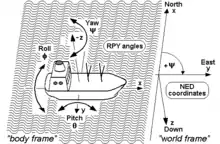 RPY-Winkel von Schiffen und anderen Wasserfahrzeugen
RPY-Winkel von Schiffen und anderen Wasserfahrzeugen RPY-Winkel von Flugzeugen und anderen Luftfahrzeugen
RPY-Winkel von Flugzeugen und anderen Luftfahrzeugen.png.webp) RPY-Winkel von Raumfähren und anderen Raumfahrzeugen bei Benutzung eines lokalen Bezugssystems
RPY-Winkel von Raumfähren und anderen Raumfahrzeugen bei Benutzung eines lokalen Bezugssystems.png.webp) RPY-Winkel von Raumfähren und anderen Raumfahrzeugen bei Benutzung eines inertialen Bezugssystems
RPY-Winkel von Raumfähren und anderen Raumfahrzeugen bei Benutzung eines inertialen Bezugssystems Orientierung der Achsen bei einem Satelliten
Orientierung der Achsen bei einem Satelliten
„ZY′X″-Konvention“
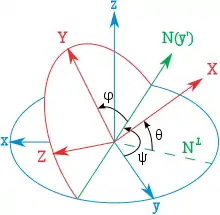
Die Rotationen beziehen sich immer auf die zunächst raumfeste rechtshändige Orthogonalbasis. Die Konvention der Orientierung der Winkel folgt der in der Mathematik üblichen Rechte-Hand-Regel, ein positiver Winkel zeigt also entgegen dem Uhrzeigersinn. Alle weiteren Rotationsachsen ergeben sich dynamisch gemäß der definierten Reihenfolge der Rotationen.
Bezeichnet man mit den Gierwinkel, mit den Nickwinkel sowie mit den Rollwinkel, so sieht die Rotationsmatrix für diese Definition folgendermaßen aus:




Ist exakt gleich , treten Singularitäten, sogenannte Gimbal Locks, auf, die sich darin äußern, dass es in diesen Fällen für und plötzlich unendlich viele Lösungen gibt. So ergibt sich z. B. für mithilfe der Additionstheoreme die Rotationsmatrix




und für die Rotationsmatrix


Berechnung aus Rotationsmatrix
Ist eine Rotationsmatrix gegeben:

Dann können die Winkel in der XYZ-Konvention folgendermaßen berechnet werden (Craig, S. 47f):



Im Falle der oben erwähnten Singularitäten dagegen sind folgende Formeln zweckmäßig:
Ist , setzt man zweckmäßigerweise


Ist stattdessen , setzt man analog zweckmäßigerweise

Dabei ist der „Arkustangens mit zwei Argumenten“, der in vielen mathematischen Programmbibliotheken existiert und gegenüber der arctan-Funktion den Vorteil hat, dass er die Fallunterscheidungen für die vier Quadranten beinhaltet.

Andere Möglichkeiten, die Orientierung zu beschreiben, sind Rotationsmatrix, Quaternionen oder die Eulerschen Winkel.
Siehe auch
Literatur
- John J. Craig: Introduction to Robotics. 2. Auflage. Addison-Wesley Publishing Company, Reading, Mass. [u. a.] 1989, ISBN 0-201-09528-9.
Einzelnachweise
- NavCommand. Software zur Konfiguration und Bedienung von iMAR – Inertialmeßsystemen. Handhabung und Benutzerhinweise. St.Ingbert 2005, S. 11–12. http://www.imar-navigation.de/index.php/de/downloads/file/58-navcommand-manual.html@1@2Vorlage:Toter+Link/www.imar-navigation.de (Seite+nicht+mehr+abrufbar,+Suche+in+Webarchiven)+
- Exploration: Having a Good Attitude Is Important. (February 21, 1995) Archivierte Kopie (Memento vom 21. November 2007 im Internet Archive) (seit 2007 unbekannt verschoben)
- Exploration: It's Such a Drag. (February 21, 1995) Archivierte Kopie (Memento vom 15. Juli 2007 im Internet Archive) (seit 2007 unbekannt verschoben)
- Exploration: Pitch, Yaw, and Roll Systems. (October 3, 1995) Archivierte Kopie (Memento vom 3. Februar 2008 im Internet Archive) (seit 2007 unbekannt verschoben)
- Exploration: Inertial Reference Orbiter Attitude. (October 3, 1995) Archivierte Kopie (Memento vom 14. Juli 2007 im Internet Archive) (seit 2007 unbekannt verschoben)
- Exploration: Local Reference Orbiter Attitude (September 18, 1995) Archivierte Kopie (Memento vom 14. Juli 2007 im Internet Archive) (seit 2007 unbekannt verschoben)