Chirp
Als ein Chirp (englisch (to) chirp „tschilpen, zirpen, Zwitschern“) oder eine Zirpe wird in der Signalverarbeitung ein Signal bezeichnet, dessen Frequenz sich zeitlich ändert. Dabei wird zwischen positiven Chirps – bei denen die Frequenz zeitlich zunimmt – und negativen Chirps – die eine Frequenzabnahme aufweisen – unterschieden.
Technische Anwendungen liegen bei der Aussendung von Mikrowellen bei dem Synthetic Aperture Radar und bei bandspreizenden Modulationsverfahren wie Chirp Spread Spectrum (CSS). In der Natur setzen Fledermäuse zur Ortung Chirp-Impulse ein.
Starke, kurze Laserpulse werden „gechirpt“, um sie – mit dadurch vergrößerter Pulsdauer – verstärken zu können (Chirped Pulse Amplification).
Gesendete Chirp Signale können mithilfe von Optimalfiltern in einem stark verrauschten Empfangssignal erkannt werden, siehe Pulskompressionsverfahren (Ortung).
Chirp-Beschreibung
Ein typisches Beispiel ist ein Signal mit dem folgenden Zeitverlauf:


In diesem Fall wird als eine zeitabhängige Frequenz interpretiert, für das unbestimmte Integral ist eine konkret fixierte Stammfunktion von einzusetzen. Diese Interpretation erfordert eine genauere Erklärung, da nach dem Unschärfeprinzip der Fourier-Transformation (s. auch Heisenbergsche Unschärferelation) es nicht möglich ist, Zeitpunkt und Frequenz gemeinsam genau zu bestimmen.

Die Frequenzangabe ist so zu verstehen, dass in einem Zeitintervall etwa volle Perioden des Sinus durchlaufen werden, die durchschnittliche Frequenz also beträgt. Nach dem Mittelwertsatz der Integralrechnung gibt es wenigstens einen Zeitpunkt , zu dem diesen Wert auch annimmt. Um von einer momentanen Frequenz zu sprechen, sollte das Zeitintervall mehrere volle Perioden umfassen, aber die Änderung von in diesem Intervall klein sein, so dass die mittlere Frequenz immer nahe dem Wert von liegt.





Beispiele und Anwendungen
Verringerung der Impulsleistung bei Radar
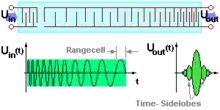
Um Echosignale weit entfernter reflektierender Objekte aus dem Rauschen herauszufiltern, muss eine gewisse Mindestenergie empfangen werden. Für genaue Entfernungsmessungen benötigt man aber möglichst kurze Sendeimpulse, denn bei einem 0,1 µs kurzen Sendeimpuls ist das Wellenpaket bereits 30 m lang. Die Kombination beider Anforderungen führt zu immensen Sendeleistungen von 10 MW, deren Erzeugung in Flugzeugen oder Satelliten Probleme bereitet. Als Ausweg wird beim Pulskompressionsverfahren ein leistungsschwacher Chirp-Impuls längerer Gesamtdauer gesendet, der beim Empfang durch spezielle Filter oder mathematische Verfahren zu einem erheblich kürzeren Impuls komprimiert wird. Dieser kann dann mit Hilfe eines Korrelationsverfahrens im Rauschen gut entdeckt werden.
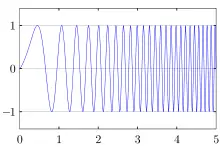
Linearer Chirp
Für den Spezialfall eines linearen Chirp steigt die Frequenz linear mit der Konstanten an:


und es gilt für den Zeitverlauf :

Akustisches Beispiel:
Exponentieller Chirp
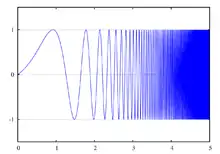
Für Radar oder Sonar werden oft exponentielle Chirps eingesetzt. Hier lautet die Frequenzabhängigkeit von der Zeit, wenn die feste Grundfrequenz ist und eine Konstante:


und damit der Zeitverlauf :

Akustisches Beispiel:
Gravitation
In einer allgemeineren Definition hat ein Chirp die Form

mit den Parametern und . Diese Signalform kommt in der Praxis bei der Detektion von Gravitationswellen vor.


Dispersion bei Licht
In der Optik werden Lichtpulse durch einen wellenlängenabhängigen Brechungsindex, der sog. Dispersion, verzerrt:
- mit


Bei der Erzeugung und Übertragung ultrakurzer Lichtpulse ist es notwendig, diese Phasenverschiebung zu kompensieren. Dazu werden neben Prismen auch sogenannte Chirpspiegel (engl.: chirped mirrors) eingesetzt, die aufgrund einer frequenzabhängigen Reflexion ausgedehnte und verzerrte Pulse wieder komprimieren können.
Bei der direkten Modulation von Halbleiterlasern entsteht der meist unerwünschte Laser-Chirp, siehe Distributed Feedback Laser
Anwendung Sonar
Um die Gewässertiefe und Fische mittels Sonar zu detektieren, werden zumindest seit 2015 Geräte angeboten, deren Schallimpulse (Pings) nicht nur mehrere diskrete feste Frequenzen im nutzbaren Ultraschallspektrum von 28 bis 235 kHz verwenden, sondern typisch 3 Bereiche dieses Spektrums durchwischen. Der niedrige von drei Frequenzbereichen reicht dabei von 28 bis 65 oder 70 kHz. Am niedrigen Ende des Bereichs wird die höchste Eindringtiefe in Wasser (jedoch geringe Winkelauflösung) erzielt, mit höherer Frequenz steigt die Detailauflösung (bei geringerer Reichweite).[1]
Als Backronym für CHIRP wurde Compressed High Intensity Radiated Pulse erfunden.[2]
Weblinks
Sonstiges
Garmin Chirp ist ein kleines Funkmodul, das mit kompatiblen Navigationsgeräten von Garmin kommuniziert, um auf einen nahen Geocache mit Zusatzinformationen hinzuweisen, Besucher zu zählen und diese Zahl dem Besitzer des Chirp bei Annäherung anzuzeigen.[3]
Chirp ist der Name einer freien Software, mit der Amateurfunkgeräte vieler Hersteller mit unterschiedlichsten Datenformaten als Input programmiert werden können.[4]
Einzelnachweise
- Ryan Moody Fishing: Garmin CHIRP technology compared to traditional fish finding sonar In: YouTube, 20. Juni 2015, abgerufen 18. Juli 2017. – Video (8:24), englisch
- 2:38/8:24 des YouTube-Videos.
- Garmin Chirp trekkinn.com, abgerufen 18. Juli 2017.
- Chirp Homepage chirp.danplanet.com, abgerufen am 26. Oktober 2018.