Differentialform
Der Begriff Differentialform (oft auch alternierende Differentialform genannt) geht auf den Mathematiker Élie Joseph Cartan zurück. Differentialformen sind ein grundlegendes Konzept der Differentialgeometrie. Sie erlauben eine koordinatenunabhängige Integration auf allgemeinen orientierten differenzierbaren Mannigfaltigkeiten.
Kontext
Es sei

- eine offene Teilmenge des
- oder eine differenzierbare Untermannigfaltigkeit des
- oder eine differenzierbare Mannigfaltigkeit.

In jedem dieser Fälle gibt es
- den Begriff der differenzierbaren Funktion auf der Raum der beliebig oft differenzierbaren Funktionen auf werde mit bezeichnet;
- den Begriff des Tangentialraums an in einem Punkt
- den Begriff der Richtungsableitung für einen Tangentialvektor und eine differenzierbare Funktion
- den Begriff des differenzierbaren Vektorfeldes auf der Raum der Vektorfelder auf sei mit bezeichnet.








Der Dualraum des Tangentialraums wird als Kotangentialraum bezeichnet.

Definition
Differentialform
Eine Differentialform vom Grad auf oder kurz -Form ist ein glatter Schnitt in der -ten äußeren Potenz des Kotangentialbündels von . In symbolischer Schreibweise bedeutet dies , wobei das Kotangentialbündel von , die -te äußere Potenz von und somit die Menge der glatten Schnitte von bezeichnet.






Dies bedeutet, dass jedem Punkt eine alternierende Multilinearform auf dem Tangentialraum zugeordnet wird; und zwar so, dass für glatte Vektorfelder die Funktion





glatt, also beliebig oft differenzierbar, ist.
Alternativ dazu kann man eine -Form als eine alternierende, glatte multilineare Abbildung auffassen. Das bedeutet: ordnet Vektorfeldern eine Funktion zu, sodass


- für



und

gilt.
Alternative unter Rückgriff auf Tensorfelder: Eine -Form ist ein alternierendes, kovariantes Tensorfeld der Stufe

Raum der Differentialformen
Die Menge der -Formen auf bildet einen Vektorraum und wird mit bezeichnet. Weiterhin setzt man


Für endlichdimensionale Mannigfaltigkeiten ist diese Summe endlich, da für der Vektorraum der Nullvektorraum ist. Die Menge ist eine Algebra mit dem äußeren Produkt als Multiplikation und somit auch wieder ein Vektorraum. Aus topologischer Sicht ist dieser Raum auch eine Garbe.


Man kann als Element der äußeren Potenz auffassen; infolgedessen definiert das äußere Produkt (d. h. das Produkt in der äußeren Algebra) Abbildungen



wobei durch


punktweise definiert ist.
Dieses Produkt ist graduiert-kommutativ, es gilt

dabei bezeichnet den Grad von d. h.: Ist eine -Form, so ist . Demnach ist das Produkt zweier Formen ungeraden Grades antikommutativ und in allen anderen Kombinationen kommutativ.



Beispiele
- Glatte Funktionen sind 0-Formen.
- Pfaffsche Formen sind 1-Formen.
Koordinatendarstellung
Es sei eine -dimensionale differenzierbare Mannigfaltigkeit. Weiter sei ein lokales Koordinatensystem (eine Karte). Dann ist




eine Basis von Dabei ist das totale Differential der -ten Koordinatenfunktion . Das heißt, ist diejenige Linearform auf , die den -ten Basisvektor der Basis auf 1 und alle anderen auf 0 abbildet.







Jede Differentialform hat auf jeder Karte eine eindeutige Darstellung


mit geeigneten differenzierbaren Funktionen

Aus der Koordinatendarstellung ergibt sich, dass für die Nullform die einzige Differentialform ist.


Äußere Ableitung
Die äußere Ableitung ist ein Operator, der einer -Differentialform eine -Differentialform zuordnet. Betrachtet man sie auf der Menge der -Differentialformen, also auf der Menge der glatten Funktionen, so entspricht die äußere Ableitung der üblichen Ableitung für Funktionen.


Definition
Die äußere Ableitung einer -Form wird induktiv mithilfe der Lie-Ableitung und der Cartan-Formel


definiert; dabei ist ein Vektorfeld, die Lie-Ableitung und die Einsetzung von




Ist beispielsweise eine 1-Form, so ist

und

also

für Vektorfelder ; dabei bezeichnet die Lie-Klammer.


Die allgemeine Formel lautet

dabei bedeutet das Dach im Zeichen , dass das entsprechende Argument wegzulassen ist.


Eigenschaften
Die äußere Ableitung hat folgende Eigenschaften:
- Die äußere Ableitung ist eine Antiderivation. Das heißt, ist -linear, und für gilt die Leibnizregel




- Sei dann stimmt die äußere Ableitung mit dem totalen Differential überein.
- Die äußere Ableitung respektiert Einschränkungen. Es sei also offen und Dann gilt Man nennt die äußere Ableitung deshalb auch einen lokalen Operator.





Diese vier Eigenschaften charakterisieren die äußere Ableitung vollständig. Das heißt, man kann aus diesen Eigenschaften die obige Summenformel herleiten. Rechnet man mit der äußeren Ableitung, so bevorzugt man das Rechnen mit den Eigenschaften der Ableitung und vermeidet die obige Formel.
Koordinatendarstellung der äußeren Ableitung
Die äußere Ableitung einer Differentialform

in Koordinatendarstellung lautet

mit den totalen Differentialen der Koeffizientenfunktionen
- .

Um die dabei entstehenden Ausdrücke wieder durch die Standardbasis auszudrücken, sind die Identitäten

und

wichtig.
Beispiel
Für gilt


Allgemein gilt für die äußere Ableitung einer 1-Form

Für bilden also die Koeffizienten der äußeren Ableitung einer 1-Form die Rotation des aus den Koeffizienten der 1-Form gebildeten Vektors.

Weitere Operationen auf Differentialformen
Inneres Produkt
Sei ein glattes Vektorfeld. Das innere Produkt ist eine lineare Abbildung


die durch

gegeben ist. Das heißt, das innere Produkt bildet eine -Form auf eine -Form ab, indem die Form an einem festen Vektorfeld ausgewertet wird. Diese Abbildung ist ein Analogon der Tensorverjüngung auf dem Raum der Differentialformen. Deshalb wird diese Operation im Englischen auch manchmal „contraction“ genannt.

Das innere Produkt ist eine Antiderivation. Das heißt, für und gilt die Leibnizregel


Außerdem gilt für das innere Produkt

Rücktransport (Pullback) von Differentialformen
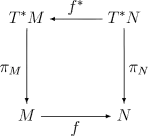


Ist eine glatte Abbildung zwischen differenzierbaren Mannigfaltigkeiten, so ist für die mittels zurückgeholte Form wie folgt definiert:





Dabei ist die durch induzierte Abbildung der Ableitungen, auch „push-forward“ genannt. Das Zurückziehen ist mit der äußeren Ableitung und dem äußeren Produkt verträglich:


- (ausführlicher geschrieben: auf der linken Seite , auf der rechten Seite dagegen ) und



- für alle

Insbesondere induziert eine Abbildung zwischen den De-Rham-Kohomologie-Gruppen (siehe unten)

wobei die Umkehr der Pfeilrichtung gegenüber zu beachten ist („pull-back“, „Kohomologie“ statt „Homologie“).
Duale Form und Stern-Operator
Betrachtet werden äußere Formen in einem -dimensionalen Raum, in dem ein inneres Produkt (Metrik) definiert ist, sodass eine orthonormale Basis des Raumes gebildet werden kann. Die zu einer äußeren Form von Grad in diesem -dimensionalen Raum duale Form ist eine -Form



Dabei seien beide Seiten in orientierter Form geschrieben. Formal wird die duale Form durch Anwendung des (Hodge-) -Operators bezeichnet. Speziell für Differentialformen im dreidimensionalen euklidischen Raum ergibt sich:




mit den 1-Formen . Dabei wurde berücksichtigt, dass die orientierte Reihenfolge hier und ist (zyklische Vertauschungen in ).




Das -Symbol soll die Tatsache unterstreichen, dass damit ein inneres Produkt im Raum der Formen auf einem zugrundeliegenden Raum gegeben ist, denn lässt sich für zwei -Formen und als Volumenform schreiben und das Integral




liefert eine reelle Zahl. Der Zusatz dual zeigt an, dass die zweifache Anwendung auf eine -Form wieder die -Form ergibt – bis auf das Vorzeichen, das gesondert betrachtet werden muss. Genauer gilt für eine -Form in einem -dimensionalen Raum, dessen Metrik die Signatur hat ( im euklidischen Raum, im Minkowski-Raum):




Oben wurde gezeigt, wie sich im 3-dimensionalen euklidischen Raum bei äußerer Ableitung einer 1-Form die 2-Form ergibt mit den Komponenten des Rotations-Vektors der Vektoranalysis als Koeffizienten. Diese 2-Form kann man mit Hilfe des -Operators nun auch formal direkt als 1-Form (rot-Vektor) schreiben: . Analog wird der -Operator zur „Übersetzung“ des oben formulierten Satzes von Stokes in die Vektoranalysis-Form benutzt.


De-Rham-Kohomologie
Aus der graduierten Algebra kann zusammen mit der äußeren Ableitung ein Kokettenkomplex konstruiert werden. Aus diesem wird dann mit den üblichen Methoden der homologischen Algebra eine Kohomologie definiert. Georges de Rham konnte zeigen, dass diese nach ihm benannte Kohomologietheorie mit der singulären Kohomologie übereinstimmt. Um die De-Rham-Kohomologie zu definieren, werden zuerst die Begriffe der exakten und der geschlossenen Differentialform definiert:
Exakte und geschlossene Formen
Eine -Form heißt geschlossen, wenn gilt; sie heißt exakt, wenn es eine -Form gibt, sodass gilt. Aufgrund der Formel ist jede exakte Form geschlossen. Man beachte, dass Geschlossenheit im Gegensatz zu Exaktheit eine lokale Eigenschaft ist: Ist eine offene Überdeckung von so ist eine -Form genau dann geschlossen, wenn die Einschränkung von auf für jedes geschlossen ist.







Die De-Rham-Kohomologiegruppen
Der Faktorraum
- (Menge aller geschlossenen -Formen auf ) (Menge aller exakten -Formen auf )

heißt -te De-Rham-Kohomologiegruppe Sie enthält Informationen über die globale topologische Struktur von


Das Lemma von Poincaré
Das Lemma von Poincaré besagt, dass gilt für und Sterngebiete . Allgemeiner gilt die Aussage dieses Lemmas für zusammenziehbare offene Teilmengen des Der Beweis ist konstruktiv, d. h., es werden explizite Beispiele konstruiert, was für Anwendungen sehr wichtig ist. Man beachte, dass aus den lokal konstanten Funktionen besteht, da es per definitionem keine exakten 0-Formen gibt. Es ist also für jedes






Ist geschlossen und exakt, so folgt


Entsprechendes gilt, falls exakt und geschlossen ist. Damit gibt es induzierte Abbildungen

Ein Beispiel aus der Elektrodynamik
In der Elektrodynamik impliziert das Lemma von Poincaré, dass zu jedem Paar elektromagnetischer Felder, die zu einer zweistufigen alternierenden Differentialform in einem vierdimensionalen Minkowskiraum zusammengefasst werden können, eine einstufige Vektorpotentialform mit existiert, ein sogenanntes „Viererpotential“, siehe auch Vierervektor. Auch Strom- und Ladungsdichten können zu einem Vierervektor bzw. zu einer entsprechenden 3-Form zusammengefasst werden.





Die relativistischen Maxwell-Gleichungen der Elektrodynamik auf einer vierdimensionalen Raum-Zeit-Mannigfaltigkeit (mit Metrik und Determinante der Metrik , wobei hier natürlich die Signatur eines Minkowski-Raumes vorliegt, etwa für entsprechend der Definition des Linienelements ) lauten beispielsweise unter Verwendung dieser Symbolik:






(die sogenannte Bianchi-Identität) und

mit dem elektromagnetischen Feldtensor ausgedrückt als 2-Form

z. B. mit der -Komponente des Vektors der magnetischen Induktion und mit dem Strom (geschrieben als 3-Form)



Hierbei ist das Antisymmetrisierungssymbol (Levi-Civita-Symbol), und das Semikolon steht für die kovariante Ableitung. Wie üblich wird über doppelt vorkommende Indizes summiert (Einsteinsche Summenkonvention) und es werden natürliche Einheiten verwendet (Lichtgeschwindigkeit ersetzt durch ). Durch Anwendung des -Operators kann man den zweiten Satz der vier Maxwellgleichungen auch alternativ mit einer 1-Form für den Strom schreiben. Aus den Maxwellgleichungen sieht man, dass und in der Elektrodynamik ganz unterschiedlichen Gleichungen gehorchen, die Dualität also keine Symmetrie dieser Theorie ist. Das liegt daran, dass die Dualität elektrische und magnetische Felder vertauscht, in der Elektrodynamik aber keine magnetischen Monopole bekannt sind. Die freien Maxwellgleichungen, die sich für ergeben, haben dagegen duale Symmetrie.





Die Potentialform ist nur bis auf einen additiven Zusatz eindeutig: und ergeben dasselbe mit einer Eichform , die erfüllt, aber ansonsten willkürlich ist. Man kann diese zusätzliche sogenannte Eichfreiheit benutzen, um punktweise zusätzliche Nebenbedingungen zu erfüllen. In der Elektrodynamik fordert man beispielsweise, dass für überall die zusätzliche sogenannte Lorenz-Bedingung (Lorenz-Eichung) gelten soll, in den vier Komponenten lautet diese Bedingung einfach . Durch diese „Eichfixierung“ ergibt sich schließlich als eindeutige Lösung aller vier Maxwell-Gleichungen das sogenannte „retardierte Potential“:








Beim Übergang zum Dualen ist zu beachten, dass man es nicht mit dem sondern mit zu tun hat, der eine andere Metrik, nämlich die Minkowski-Metrik, trägt. Das bei Lorentztransformationen invariante Linienelement ist wobei das Differential der Eigenzeit ist und die Summenkonvention verwendet wurde. Ko- und kontravariante Vierervektorkomponenten unterscheiden sich nun. Zwar ist aber und








Integrationstheorie
Orientierung
Ist so heißt eine -Form auf die in keinem Punkt verschwindet, eine Orientierung auf zusammen mit einer derartigen Form heißt orientiert. Eine Orientierung definiert Orientierungen der Tangential- und Kotangentialräume: Eine Basis des Kotangentialraums in einem Punkt sei positiv orientiert, wenn




mit einer positiven Zahl gilt. Eine Basis des Tangentialraums in einem Punkt sei positiv orientiert, wenn



gilt.
Zwei Orientierungen heißen äquivalent, wenn sie sich nur um einen überall positiven Faktor unterscheiden; diese Bedingung ist äquivalent dazu, dass sie auf jedem Tangential- oder Kotangentialraum dieselbe Orientierung definieren.
Ist zusammenhängend, so gibt es entweder gar keine oder genau zwei Äquivalenzklassen.
heißt orientierbar, wenn eine Orientierung von existiert.
Integration von Differentialformen
Es sei wieder und wir nehmen an, auf sei eine Orientierung gewählt. Dann gibt es ein kanonisches Integral

für -Formen Ist eine offene Teilmenge des , sind die Standardkoordinatenfunktionen im und ist



so gilt:

Das Integral auf der rechten Seite ist das gewöhnliche Lebesgue-Integral im
Ist eine -dimensionale orientierte Mannigfaltigkeit, offen und eine Karte, so definiert man



als Integral der -Form über ein Kartengebiet . Die Differentialform wird also mit der Parametrisierung von auf die offene Teilmenge zurückgeholt und dann nach obiger Definition integriert. Aus dem Transformationssatz folgt, dass diese Definition invariant gegenüber Koordinatenwechsel ist.


Ist allgemeiner eine messbare Teilmenge von , so definiert man


mit der charakteristischen Funktion , d. h., wird außerhalb von null gesetzt.

Zur Definition des Integrals über ganz kann eine Zerlegung

in abzählbar viele paarweise disjunkte messbare Teilmengen gewählt werden, sodass jedes ganz in einem Kartengebiet enthalten ist. Damit setzt man


- .

Für Integrale von Differentialformen gilt der folgende Transformationssatz: Ist ein orientierungserhaltender Diffeomorphismus, dann gilt für


mit der auf zurückgeholten Form .

Satz von Stokes
Ist eine kompakte orientierte -dimensionale differenzierbare Mannigfaltigkeit mit Rand und versieht man mit der induzierten Orientierung, so gilt für jede -Form



Dieser Satz ist eine weitreichende Verallgemeinerung des Hauptsatzes der Differential- und Integralrechnung. Er enthält als Spezialfälle den gaußschen Integralsatz und den klassischen Integralsatz von Stokes.
Ist geschlossen, das heißt, gilt so folgt für jede exakte -Form d. h. für die Beziehung




Zur Verdeutlichung der genannten Eigenschaft von benutzt man oft die Formulierung mit einem Kreis-Integral:

Das Integral liefert eine Abbildung

Ist zusammenhängend, so ist diese Abbildung ein Isomorphismus. Man kommt damit zur De-Rham-Kohomologie zurück (s. o.).
Rechenbeispiele
Auf mit den kartesischen Koordinaten seien die 1-Form


und die 2-Form

gegeben.
Für das äußere Produkt gilt:

Die äußere Ableitung von ergibt
- ,

also . Insbesondere ist exakt und folglich geschlossen, d. h. . Das lässt sich auch durch direkte Rechnung überprüfen: .




Sei weiter gegeben durch , dann folgt mit , , und , , für die auf zurückgeholte Form:










Für das Integral von über die durch gegebene Kurve im ergibt sich somit

- .

Ist die Einheitssphäre im , so ist der Rand der Einheitskugel , also . Nach dem Satz von Stokes gilt also wegen




- .

Die 3-Form kann beispielsweise über den Einheitswürfel integriert werden. Ihr Integral stimmt mit dem Lebesgue-Integral der Koeffizientenfunktion überein:



- .

Komplexe Differentialformen
In der Theorie der komplexen Differentialformen wird der hier eingeführte Kalkül auf komplexe Mannigfaltigkeiten übertragen. Dies funktioniert größtenteils analog zur Definition der hier beschriebenen Formen. Jedoch werden hier analog zu den komplexen Zahlen die Räume der komplexen Differentialformen in zwei Räume (reeller) Differentialformen

zerlegt. Der Raum heißt dann der Raum der -Formen. Auf diesen Räumen kann man analog zur äußeren Ableitung zwei neue Ableitungen definieren. Diese werden Dolbeault- und Dolbeault-Quer-Operator genannt, und analog zur De-Rham-Kohomologie kann man mit Hilfe des Dolbeault-Quer-Operators wieder eine Kohomologie bilden. Diese heißt Dolbeault-Kohomologie.


Siehe auch
Literatur
- Herbert Amann, Joachim Escher: Analysis III. 2. Auflage. Birkhäuser, Basel 2008, ISBN 978-3-7643-8883-6, Kapitel XI und XII.
- Henri Cartan: Differentialformen. Bibliographisches Institut, Mannheim 1974, ISBN 3-411-01443-1.
- Klaus Jänich: Vektoranalysis. 5. Auflage. Springer, Berlin/Heidelberg 2005, ISBN 978-3-540-27338-7.
- Shigeyuki Morita: Geometry of differential forms. American Mathematical Society 2001, ISBN 0821810456.
- Harley Flanders: Differential forms with applications to the physical sciences. Academic Press, 1963.
- Harold Edwards: Advanced Calculus – a differential forms approach. Birkhäuser, 1994 (zuerst 1969).
- Steven H. Weintraub: Differential Forms – a complement to vector calculus. Academic Press, 1997.
Weblinks
- Gunnar Fløystad: The Exterior Algebra and Central Notions in Mathematics. (PDF; 182 kB). Notices AMS, Band 62, 2015, Nr. 4.
- Differential Form in nLab.