Bipedie
Bipedie (lat. bis „doppelt“, pes/pedis „Fuß“) ist die Fortbewegung, beispielsweise Gehen oder Hüpfen, auf zwei Beinen („Zweibeinigkeit“). Landwirbeltiere oder Maschinen, die sich gewöhnlich biped bewegen, werden als Bipede („Zweibeiner“) bezeichnet.
Man unterscheidet zwischen habitueller (obligater, gewohnheitsmäßiger) Bipedie und fakultativer (gelegentlicher) Bipedie. Die habituelle Bipedie betrifft Lebewesen, die vollständig an die bipede Fortbewegung angepasst sind, wie beispielsweise den Menschen. Die fakultative Bipedie betrifft Tiere, die sich aufrichten und möglicherweise für kurze Strecken laufen können, jedoch morphologisch nicht vollständig an diese Fortbewegungsform angepasst sind. Dies ist etwa bei Gibbons (Hylobatidae) und Schimpansen (Pan) der Fall.

Arten der Bipedie
Es gibt eine Anzahl von Bewegungszuständen, die gewöhnlich mit Bipedie in Verbindung gebracht werden.
- Stehen. Das bewegungslose Verharren auf beiden (im Allgemeinen gestreckten) Beinen. Bei den meisten Zweibeinern ist dies ein aktiver Vorgang, der das ständige Nachregulieren des Gleichgewichtes erfordert.
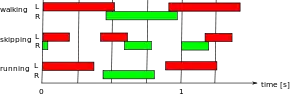
- Gehen. Ein Fuß (oder eine Hand – beim Gehen auf den Händen) wird vor den anderen gesetzt, wobei mindestens ein Fuß zu jeder Zeit den Boden berührt.
- Laufen. Ein Fuß wird vor den anderen gesetzt, wobei zu bestimmten Zeitpunkten kein Fuß den Boden berührt.
- Hüpfen. Die Fortbewegung durch eine Folge von Sprüngen, bei denen beide Füße zugleich bewegt werden.
- Hopserlauf. Längere Phase ohne Bodenberührung als beim Laufen verbunden mit Phasen, in denen ein oder beide Füße den Boden berühren.
Merkmale der Bipedie
Bipedie und die dazugehörigen Merkmale können einer Art verschiedene Vorteile bieten:
- Verbesserte Wahrnehmung. Einige Evolutionsbiologen haben vorgeschlagen, dass eine entscheidende Stufe in der Evolution einiger oder sogar aller Zweibeiner die Fähigkeit zu stehen war, die allgemein die Fähigkeit entfernte Gefahren oder Ressourcen zu sehen (und vielleicht auf andere Art zu entdecken) verbessert.
- Freie Vorderbeine. Bei Wirbeltierarten, für die die Entwicklung zusätzlicher Gliedmaßen eine enorme genetische Veränderung bedeuten würde, kann Bipedie dazu dienen, die vorderen Gliedmaßen für solche Funktionen freizumachen, wie Handarbeiten (bei Primaten), Fliegen (bei Vögeln), Graben (Riesenschuppentier) oder Kampf (Bären).
- Waten. Waschbären und einige Primaten können eine zweibeinige Stellung im Wasser annehmen, die es ihnen erlaubt, in tieferem Wasser zu stehen oder zu laufen, während sie immer noch Luft atmen können.
- Bei Tieren ohne biegsames Rückgrat, so wie Echsen oder Kakerlaken, kann vorübergehende Bipedie die Laufgeschwindigkeit erhöhen. Einige Zweibeiner sind schnelle und ausdauernde Läufer, so erreichen der Strauß oder das rote Känguru etwa 60–70 km/h.
- Größere Reichweite. Die Giraffengazelle nimmt eine zweibeinige Stellung an, um die Blätter von Bäumen zu äsen.
- Tarnung. Es wurde vermutet, dass Bipedie bei Kraken es diesen ermöglicht sich fortzubewegen, während sie den Rest des Körpers für die Tarnung regungslos halten können.
Evolution des Menschen


Es gibt viele Hypothesen dazu, wie und warum sich bei den frühen Vorfahren der Gattung Homo die Bipedie entwickelt hat, und es gibt auch unterschiedliche Hypothesen zum Wann. Die Funde von Fossilien geben Anlass zur Annahme, dass sich die Bipedie vor der Vergrößerung des menschlichen Gehirns entwickelt hat[1] und dass sie sich im Formenkreis der frühen Menschenaffen – nachweisbar vor allem am Verlust des Greiffußes – mehrfach unabhängig voneinander entwickelte.[2] Die diversen Hypothesen schließen einander nicht notwendigerweise aus, und eine gewisse Anzahl von Einflussfaktoren könnte zusammengewirkt haben, um zur Bipedie der Hominini zu führen. Die Fähigkeit zur fakultativen Bipedie bei einigen Primaten lässt darauf schließen, dass die menschliche Bipedie eine Weiterentwicklung derselben ist.
Hierfür spricht insbesondere die Hypothese von der Entwicklung des aufrechten Gangs auf Bäumen. Laut einem Bericht der Zeitschrift Science aus dem Jahre 2007 haben Forscher ein Jahr lang Orang-Utans auf der Insel Sumatra beobachtet.[3] Die Analyse von rund 3000 Bewegungen ergab, dass die Orang-Utans sich auf sehr dünnen Zweigen auf zwei Beinen fortbewegen, sich dabei mit den Händen an darüber hängenden Zweigen festhalten und mit den Armen ihr Gewicht ausbalancieren. Der hieraus abgeleiteten Theorie zufolge hätten die Vorfahren der Hominini, als die afrikanischen Wälder während einer Trockenperiode nach und nach verschwanden, mit dem „Umzug“ auf den Boden reagiert, wo sie den aufrechten Gang weiter entwickelten und perfektionierten. Auch der 2019 publizierte Fund von Danuvius guggenmosi wurde als Bestätigung dieser Hypothese interpretiert.[4] Zu den einander ergänzenden Hypothesen zur Entwicklung des aufrechten Ganges gehört auch, dass beispielsweise Bonobos und Gorillas sich an Flüssen oder in der Mangrove aufhalten, wo sie sich im Wasser mit untergetauchtem Körper bewegen, während sie sich zum Beispiel an über ihnen befindlichen Ästen festhalten.
Menschenkinder durchlaufen eine frühkindliche Entwicklungsphase, in der sie sich mit den Händen festhalten, um den aufrechten Gang zu üben. Entsprechend der biogenetischen Grundregel dürften daher die Menschenvorfahren ein entsprechendes stammesgeschichtliches Entwicklungsstadium durchlaufen haben[5].
Ältester fossiler Beleg für einen von seiner Funktion her dem Menschen vergleichbaren Fuß ist ein vollständig erhaltener, 3,2 Millionen Jahre alter Mittelfußknochen von Australopithecus afarensis (Archiv-Nummer AL 333-160), dessen Merkmale sowohl das Vorhandensein eines Längsgewölbes als auch eines Quergewölbes erkennen lassen, die beide als „Stoßdämpfer“ beim aufrechten Laufen dienen.[6] Die ältesten überlieferten Fußspuren aufrecht gehender Hominini stammen aus Laetoli und sind ungefähr 3,6 Millionen Jahre alt.
Zweibeinige Tiere
Die zweibeinige Fortbewegung hat sich wiederholt und unabhängig voneinander entwickelt, größtenteils bei Wirbeltieren. So beispielsweise bei Vögeln wie dem Helmkasuar und ihren fossilen Verwandten, den Dinosauriern, die bis auf die Sauropodomorpha alle bipede Läufer waren. Es wird angenommen, dass alle theropoden Dinosaurier von einem zweibeinigen Vorfahren abstammen, der vielleicht dem Eoraptor ähnelte. Heute lebende Laufvögel wie der Strauß erreichen Geschwindigkeiten von bis zu 65 km/h. Von vielen Theropoda, besonders den Maniraptora, wird ebenfalls angenommen, dass sie sich mit ähnlichen Geschwindigkeiten fortbewegen konnten. Die zweibeinige Fortbewegung entwickelte sich auch bei einer Anzahl anderer Dinosaurier-Abstammungslinien, wie bei den Iguanodon. Bipedie scheint sich auch bei den Krokodilen, einer Schwestergruppe von Dinosauriern und Vögeln, entwickelt zu haben. Effigia okeeffeae – ein entfernter Verwandter der Krokodile aus der Trias – wird für einen Zweibeiner gehalten.[7] Pinguine sind in Hinsicht auf die Bipedie interessante Vögel, da sie ihre Körper aufrecht halten, während andere Vögel ihn eher horizontal halten.
Zweibeinige Fortbewegung ist unter Säugetieren weniger verbreitet, von denen die meisten Vierbeiner (Tetrapoda) sind. Die artenreichste Gruppe von Säugetieren, die die zweibeinige Fortbewegung nutzen, sind die Kängurus und ihre Verwandten. Diese neigen jedoch dazu, sich hauptsächlich durch Hüpfen fortzubewegen, was sie von Menschen, Vögeln und Theropoda deutlich unterscheidet. Es gibt außerdem noch verschiedene Gruppen von hüpfenden Nagetieren, wie die Kängururatten. Ein Primat – der Sifaka – bewegt sich auf dem Boden auch hüpfend fort. Die möglicherweise einzigen weiteren Säugetiere außer dem Menschen, die sich ebenfalls zweibeinig eher in einer alternierenden Gangart als durch Hüpfen fortbewegen, sind verschiedene andere Primaten wie Gibbons, wenn sie sich auf dem Boden befinden, und Kapuzineraffen. Letztere transportieren auf den Hinterbeinen laufend Gegenstände sowohl horizontal über den Boden als auch vertikal im Geäst, wie dies beim Rückenstreifen-Kapuzinern nachgewiesen ist.[8]
Eingeschränkte Beispiele für Zweibeinigkeit findet man bei einigen anderen Säugetieren. Zum Beispiel waten Bonobos und Nasenaffen, die beide in Wäldern leben, die oft überschwemmt sind, in einer zweibeinigen Haltung durch Wasser. Unter bestimmten Umständen gehen oder stehen Bonobos, Nasenaffen und seltener auch einige andere Primaten ebenfalls zweibeinig an Land. Eine Anzahl anderer Tiere, wie Ratten, hocken sich auf ihre Hinterbeine, um beim Fressen Nahrung festzuhalten. Der Waschbär steht oft aufrecht oder gehockt im Wasser, um seine Hände für die Handhabung von Nahrung, Steinen und Stöcken zu benutzen. Biber bewegen sich auch gelegentlich beim Tragen von Ästen zweibeinig. Einige Tiere, wie Bären, können sich bei körperlichen Auseinandersetzungen aufrichten und sich zweibeinig fortbewegen, so dass sie ihre Tatzen besser als Waffen einsetzen können. Eine Anzahl von Säugetieren, wie Ziesel oder Erdmännchen, stellen sich ebenfalls auf die Hinterbeine, um ihre Umgebung zu erkunden, ohne jedoch auf ihnen zu laufen. Schließlich ist die Giraffengazelle dafür bekannt, auf ihren Hinterbeinen zu stehen, um Blätter von Bäumen zu fressen. Ebenso können sich Schuppentiere, Ameisenbären und Gürteltiere auf den Hinterbeinen aufrichten, teils erfolgt dies bei der Nahrungssuche, teils im Verteidigungsfall. Für manche ausgestorbene Faultiere wie das riesige Megatherium oder andere große Bodenfaultiere wird dies ebenfalls angenommen. Neben einzelnen Spurenfossilien deutet auch der weit nach hinten verlagerte Körperschwerpunkt darauf hin. Allerdings kann eine teils angenommene obligate zweibeinige Fortbewegung aus anatomischen Gründen ausgeschlossen werden.[9][10][11] Eine andere ausgestorbene Gruppe, die zu den Unpaarhufern gehörenden Chalicotherien, könnte sich ebenfalls ähnlich verhalten haben. Eine ungewöhnliche Form der beschränkten Bipedie zeigen die Fleckenskunks, die sich, wenn sie sich bedroht fühlen, auf ihre Vorderbeine stellen, was ihnen erlaubt, ihre Analdrüsen, die ein streng riechendes Sekret ausstoßen können, auf den Angreifer zu richten, während sie diesen immer noch ansehen.
Bipedie ist bei Amphibien völlig unbekannt. Unter den nicht-archosaurischen Reptilien ist Bipedie selten, allerdings findet sie sich beim „aufgebäumten“ Laufen bestimmter Echsen. Ein interessantes Beispiel findet sich bei zumindest einer Art der Basiliskenechsen, die mit dieser Methode eine gewisse Strecke über die Oberfläche von Gewässern laufen kann. Bipedie in der Form von aufgebäumtem Laufen kann man auch bei einigen Insekten, wie Kakerlaken, finden. Ansonsten ist zweibeinige Fortbewegung bei Gliederfüßern nicht bekannt. Zweibeiner sind beinahe ausschließlich Landwirbeltiere. Jedoch gibt es wenigstens zwei Arten von Kraken, von denen bekannt ist, dass sie sich zweibeinig bewegen. Diese Art der Fortbewegung scheint es ihnen zu erlauben, einigermaßen getarnt zu bleiben, während sie sich schnell fortbewegen, indem sie die Form z. B. einer Kokosnuss oder von Seetang annehmen und sich auf den Spitzen von zweien ihrer Arme fortbewegen.
Ausnahmefälle
Viele Tiere, die natürlicherweise keine bipede Fortbewegung benutzen, können abgerichtet werden, auf den Hinterbeinen zu laufen. Tiere, denen aufgrund von Verletzungen oder angeborenen Fehlbildungen Gliedmaßen fehlen, können sich an die zweibeinige Fortbewegung anpassen, entweder auf zwei Hinterbeinen oder auf einem Vorder- und einem Hinterbein.
Einige Tiere können auch abgerichtet werden, auf den Vorderbeinen zu laufen, obwohl es dieser Methode an praktischen Vorteilen fehlt, es sei denn zum Zweck der gymnastischen Vielfältigkeit in der Unterhaltung. Auch Menschen können lernen, unter Zuhilfenahme ihrer Arme oder nur mit ihren Armen zu gehen (Handstand). Dies ist ungewöhnlich und erfordert mentale und körperliche Übung, wie viele körperliche Bewegungsarten, da es andernfalls zu Verletzungen aufgrund von fehlendem Schutz durch verkümmerte oder unausgeglichene Muskeln kommen kann, die für diese Bewegungen zu schlecht entwickelt sind.
Einige ungewöhnliche einzelne Primaten-Individuen waren dafür bekannt, zweibeinig zu sein. Es gab einen belegten Fall eines Makaken, der komplett zum zweibeinigen Gehen überging, nachdem er sich von einer ernsten Erkrankung erholt hatte, und wenigstens ein Beispiel für einen gefangenen Schimpansen, der ausschließlich aufrecht ging.
Physiologie der Bipedie
Zweibeinige Fortbewegung tritt auf mehrere Arten in Erscheinung und macht viele mechanische und neurologische Anpassungen nötig. Einige davon sind im Folgenden beschrieben.
Biomechanik
Ingenieure, die zweibeiniges Gehen oder Laufen untersuchen, beschreiben es als wiederholt unterbrochenes Fallen. Das Phänomen des Stolperns ist in Hinsicht auf das „kontrollierte-Fall“-Konzept des Gehens oder Laufens aufschlussreich. Die übliche Art sich Stolpern vorzustellen ist als Wegziehen eines Beines von einem Gehenden oder einem Läufer. Tatsächlich genügt jedoch das bloße Stoppen der Bewegung eines Beines des Gehenden oder bloß die Verlangsamung eines Beines des Läufers, um sie zum Stolpern zu bringen. Sie „fallen“ vorher bereits, und es reicht aus, das stolpernde Bein daran zu hindern, diesen Fall aufzuhalten, um Zweibeiner zu Boden stürzen zu lassen.
- Stehen
Ein energieeffizientes zweibeiniges Stehen erfordert andauernde Regulation des Gleichgewichtes, bei der natürlich eine Überkorrektur vermieden werden muss.
- Gehen
Effizientes Gehen ist komplizierter als Stehen. Es bedingt das leichte Kippen aus dem Gleichgewicht nach vorne und zur Seite und die rechtzeitige Korrektur des Gleichgewichtes. Beim Menschen ist das Gehen aus verschiedenen einzelnen Prozessen zusammengesetzt:
- zwischen den Füßen vor- und zurück schwanken
- mit den Zehen voranschieben, um die Geschwindigkeit zu halten
- kombinierte Unterbrechungen beim Schwanken und Neigen der Fußknöchel in die andere Richtung
- Beugen und Strecken des Knies, um das „Vorwärtsfallen“ aufzuhalten
Im ruhigen Gang machen längere Beine längere Schritte, die dafür langsamer erfolgen. Dies hängt damit zusammen, dass die Beine bei dieser Bewegung als Pendel wirken.
- Laufen
Laufen ist ein inhärent fortlaufender Prozess, im Gegenteil zum Gehen. Ein zweibeiniges Wesen oder Gerät befindet sich, wenn es effizient läuft, in einem andauernden Zustand des Vorwärtsfallens. Dies wird nur durch das wiederholte Selbstauffangen zum richtigen Zeitpunkt, aber im Falle des Laufens eben nur mit dem Aufschieben des fast unausweichlichen Falles für die Dauer eines weiteren Schrittes als relativ gleichmäßige Bewegung aufrechterhalten.
- Hüpfen
Muskulatur
Bipedie erfordert starke Beinmuskeln insbesondere in den Oberschenkeln. Man stelle nur beim domestizierten Geflügel die muskulösen Beine den kleinen knochigen Flügeln gegenüber. Ebenso sind beim Menschen der Quadrizeps und die hinteren Oberschenkelmuskeln so wichtig für zweibeinige Vorgänge, dass jeder einzelne dieser Muskeln wesentlich größer ist als selbst ein gut ausgebildeter Armbizeps.
Je schneller der Gang ausgeführt wird, desto anstrengender ist er. Der ruhige Gang ist jedoch weniger ermüdend als das Stehen, da die Beine dabei abwechselnd entlastet werden. Das ist im Stand nicht der Fall, so dass dieser mehr als doppelt so anstrengend sein kann wie der ruhige Gang.[12]
Nervensystem
Der Patellarsehnenreflex (auch: Kniesehnenreflex) ist ein bekanntes Beispiel für das extrem schnelle Regelungssystem bei Zweibeinern, mit dessen Hilfe einer drohenden Störung der aufrechten Haltung entgegengewirkt wird: Wie für Reflexe üblich reagiert das Individuum völlig unbewusst, und die Reaktion vollzieht sich zudem auf keinen Nervenbahnen, die vom Bein zum Gehirn führen.
Ein weniger gut bekannter Aspekt der Neuroanatomie von Zweibeinern kann sich bei menschlichen Kleinkindern zeigen, die noch nicht die Fähigkeit zum Aufstehen entwickelt haben. Sie können trotzdem mit großer Geschicklichkeit laufen, vorausgesetzt, dass sie in einer senkrechten Stellung gestützt werden und dass ihnen der Reiz eines sich bewegenden Laufbandes unter den Füßen angeboten wird.
Atmung
Ein Zweibeiner besitzt auch die Fähigkeit, während des Laufens zu atmen. Menschen atmen gewöhnlich bei jedem zweiten Schritt, wenn ihr aerobes System funktioniert. Während eines Sprints verlangsamt sich die Atmung, sobald das anaerobe System anläuft, und zwar solange, bis das anaerobe System den Sprint nicht mehr länger tragen kann.
Zweibeinige Roboter

Mobile Roboter werden meist für eine Fortbewegung mit Rädern, Ketten oder Schienen gebaut – je nach ihrer speziellen Aufgabe. Bipede Roboter stellen im Gegensatz zu spezialisierten Bewegungsapparaten größere Herausforderungen sowohl an die mechanische Konstruktion als auch an die Steuerung. Bis heute unerreichte Leistungen auf diesem Gebiet wurden in den frühen 1980er Jahren von Marc Raibert[13] am MIT erzielt.
Die bekanntesten und fortschrittlichsten bipeden Roboter sind ASIMO (von Honda), Qrio (von Sony), Johnnie (von der TUM[14]) und die HRP-Reihe[15][16]
Siehe auch
- Quadrupedie (Fortbewegung mit vier Beinen)
Literatur
- Kurt Bayertz: Der aufrechte Gang : eine Geschichte des anthropologischen Denkens. München: C.H.Beck, 2013, ISBN 3-406-63848-1.
- William E. H. Harcourt-Smith: The Origins of Bipedal Locomotion. Kapitel 5 in: Winfried Henke und Ian Tattersall (Hrsg.): Handbook of Paleoanthropology. Band 3: Phylogeny of Hominids, S. 1483–1518. Springer, Berlin und Heidelberg 2007, ISBN 978-3-540-32474-4
Weblinks
Einzelnachweise
- C. Owen Lovejoy: Evolution of Human Walking. In: Scientific American. Band 259, Nr. 5, 1988, S. 118–125, Volltext (PDF)
- W. E. H. Harcourt-Smith, Leslie C. Aiello: Fossils, feet and the evolution of human bipedal locomotion. In: Journal of Anatomy. Band 204, Nr. 5, 2004, S. 403–416, doi:10.1111/j.0021-8782.2004.00296.x
- S. K. S. Thorpe et al.: Origin of Human Bipedalism as an Adaptation for Locomotion on Flexible Branches. Science, Band 316, 2007, S. 1328–1331, doi:10.1126/science.1140799; vergl. dazu: www.sueddeutsche.de: „Aufrecht auf dem Ast“.
- Madelaine Böhme et al.: A new Miocene ape and locomotion in the ancestor of great apes and humans. In: Nature. Band 575, 2019, S. 489–493, doi:10.1038/s41586-019-1731-0.
- youtube.com
- Carol V. Ward, William H. Kimbel und Donald C. Johanson: Complete Fourth Metatarsal and Arches in the Foot of Australopithecus afarensis. In: Science, Band 331, Nr. 6018, 2011, S. 750–753, doi:10.1126/science.1201463
- National Geographics News: Dino-Era Fossil Reveals Two-Footed Croc Relative
- Tiago Falótico, Agumi Inaba, William C. McGrew und Eduardo B. Ottoni: Vertical bipedal locomotion in wild bearded capuchin monkeys (Sapajus libidinosus). Primates 57 (4), 2016, S. 533–540; doi:10.1007/s10329-016-0542-2
- Adrià Casinos: Bipedalism and quadrupedalism in Megatherium: an attempt at biomechanical reconstruction. Lethaia 29, 1996, S. 87–96
- R. Ernesto Blanco und Ada Czerwonogora: The gait of Megatherium Cuvier 1796 (Mammalia, Xenarthra, Megatheriidae). Senckenbergiana biologica 83 (1), 2003, S. 61–68
- M. Susana Bargo, Sergio F. Vizcaíno, Fernando M. Archuby und R. Ernesto Blanco: Limb bone proportions, strength and digging in some Lujanian (Late Pleistocene-Early Holocene) mylodontid ground sloths (Mammalia, Xenarthra). Journal of Vertebrate Paleontology 20 (3), 2000, S. 601–610
- Franz Daffner: Das Wachstum des Menschen. Anthropologische Studie. 2. Auflage. Engelmann, Leipzig 1902, S. 356.
- MIT: 3D Biped (1989-1995)
- Technische Universität München: Laufmaschine JOHNNIE
- Heise: HRP-4C: Das nächste Supermodel?
- AIST