Affine Abbildung
In der Geometrie und in der Linearen Algebra, Teilgebieten der Mathematik, ist eine affine Abbildung (auch affine Transformation genannt, insbesondere bei einer bijektiven Abbildung) eine Abbildung zwischen zwei affinen Räumen, bei der Kollinearität, Parallelität und Teilverhältnisse bewahrt bleiben oder gegenstandslos werden. Präziser formuliert:
- Die Bilder von Punkten, die auf einer Geraden liegen (d. h. kollinear sind), liegen wieder auf einer Geraden (Invarianz der Kollinearität). Dabei können auch alle – aber dann alle und nicht nur einige – Punkte einer Geraden auf einen Punkt abgebildet werden.
- Die Bilder zweier paralleler Geraden sind parallel, wenn keine der beiden Geraden auf einen Punkt abgebildet wird.
- Drei verschiedene Punkte, die auf einer Geraden liegen (kollineare Punkte), werden so abgebildet, dass das Teilverhältnis ihrer Bildpunkte mit dem der Urbildpunkte übereinstimmt – es sei denn, alle drei werden auf denselben Bildpunkt abgebildet.
Eine bijektive affine Abbildung eines affinen Raumes auf sich selbst wird Affinität genannt.
In der Schulmathematik und manchen Anwendungsgebieten (zum Beispiel in der Statistik, siehe unten) werden spezielle affine Abbildungen auch lineare Abbildung oder lineare Funktion genannt. Im allgemeinen mathematischen Sprachgebrauch ist eine lineare Abbildung jedoch ein Homomorphismus von Vektorräumen.
Definition
Eine Abbildung zwischen affinen Räumen und heißt affine Abbildung, wenn es eine lineare Abbildung zwischen den zugehörigen Vektorräumen gibt, so dass





für alle Punkte gilt. Dabei bezeichnen und die Verbindungsvektoren der Urbild- bzw. der Bildpunkte.



In dem wichtigen Anwendungsfall, dass und gilt, ist eine Abbildung bereits dann eine affine Abbildung, wenn es eine lineare Abbildung gibt mit



für alle in . In diesem Fall entsteht eine affine Abbildung also durch eine Translation einer linearen Abbildung mit dem Bild des Nullpunkts.



Eigenschaften
- Die affine Abbildung aus der Definition ist durch eindeutig bestimmt. Sie wird im Folgenden mit bezeichnet.
- Eine Abbildung ist genau dann affin, wenn es ein gibt, sodass die Abbildung




- linear ist.

- Sind und sowie eine lineare Abbildung vorgegeben, so gibt es genau eine affine Abbildung mit und .
- Eine affine Abbildung ist genau dann bijektiv, wenn bijektiv ist. In diesem Fall ist die Umkehrabbildung ebenfalls affin und es gilt .
- Ist ein weiterer affiner Raum und sind , affin, dann ist auch affin und es gilt .










Koordinatendarstellung
Dieser Abschnitt befasst sich mit affinen Abbildungen zwischen endlichdimensionalen affinen Räumen.
Affine Koordinaten
Wenn sowohl im Urbildraum als auch im Bildraum ein affines Koordinatensystem fest gewählt worden ist, dann setzt sich bezüglich dieses Koordinatensystems eine affine Abbildung aus einer linearen Transformation und einer Parallelverschiebung zusammen. Die lineare Transformation lässt sich dann als Matrix-Vektor-Produkt schreiben und die affine Transformation ergibt sich aus der Matrix (der Abbildungsmatrix) und dem Verschiebungsvektor :




Die Koordinatenvektoren und sind in dieser Schreibweise Spaltenvektoren und stellen die affinen Koordinaten der Ortsvektoren eines Urbildpunktes bzw. eines Bildpunktes dar. Die Anzahl der Zeilen der Matrix ist gleich der Dimension des Raumes , in den abgebildet wird (Wertevorrat), die Anzahl ihrer Spalten ist gleich der Dimension des abgebildeten Raumes .


Die Dimension des Bildraumes der affinen Abbildung ist gleich dem Rang der Abbildungsmatrix .

Bei einer affinen Selbstabbildung eines affinen Raumes wird nur ein affines Koordinatensystem gewählt, die Koordinatenvektoren und beziehen sich also auf dasselbe Koordinatensystem, die Abbildungsmatrix ist quadratisch, d. h. ihre Zeilen- und Spaltenzahl ist gleich. In diesem Zusammenhang ist es üblich, den affinen Raum mit dem zugehörigen Vektorraum der Verschiebungen zu identifizieren. In diesem Sinn umfassen die affinen Selbstabbildungen alle linearen Abbildungen (mit ) und ergänzen diese um einen Translationsanteil.

Eine affine Selbstabbildung ist genau dann eine Affinität, wenn die Determinante der Abbildungsmatrix ungleich 0 ist.
Homogene Koordinaten und Erweiterte Abbildungsmatrix
Wählt man zur Darstellung sowohl im Urbildraum als auch im Bildraum homogene affine Koordinaten, dann lässt sich der Verschiebungsvektor mit der Abbildungsmatrix zu einer erweiterten Abbildungsmatrix zusammenfassen:

- dabei ist der transponierte Nullvektor im Vektorraum, der zu gehört.


Die Abbildungsgleichung lautet dann für homogene Koordinatenvektoren
- .

Bei dieser Darstellung der erweiterten Matrix wird als homogenisierende Koordinate eine zusätzliche Koordinate an den Spaltenvektor angefügt:

- .

Diese Darstellung durch homogene Koordinaten kann als eine Einbettung des affinen Raumes in einen projektiven Raum der gleichen Dimension interpretiert werden. Dann sind die homogenen Koordinaten als projektive Koordinaten zu verstehen.
Klassifikation der ebenen Affinitäten
Affinitäten werden generell zunächst danach unterschieden, wie viele Fixpunkte sie haben. Dies gilt auch, wenn der affine Raum mehr als zwei Dimensionen hat. Ein Punkt ist Fixpunkt, wenn er durch die Affinität auf sich selbst abgebildet wird. In der Koordinatendarstellung kann man den Koordinatenvektor eines Fixpunkts bestimmen, indem man das Gleichungssystem löst. Man beachte, dass auch für Fixpunkte existieren können!



- Achsenaffinität: Eine ebene Affinität, bei der genau eine Gerade punktweise fix bleibt, sie wird Achse der Affinität genannt. Dazu zählen die Scherung, Schrägspiegelung (speziell die senkrechte Achsenspiegelung) und die Parallelstreckung.
- Affinität mit einem Zentrum (Zentrale Affinität): eine Affinität, bei der genau ein Punkt fix bleibt, das Zentrum der Affinität. Dazu zählen die Drehstreckung (mit den Spezialfällen zentrische Streckung, Drehung und Punktspiegelung), die Scherstreckung und die Euleraffinität.
- Affinitäten ohne Fixpunkt: Das sind die reinen Verschiebungen und Hintereinanderausführungen einer Achsenaffinität und einer Verschiebung (Scherung mit Verschiebung in eine von der Achsrichtung verschiedene Richtung oder Parallelstreckung/Schrägspiegelung mit einer Verschiebung in Richtung der Achse).

Ausführlicher und verallgemeinert auf höhere Dimensionen wird die Klassifikation im Hauptartikel Affinität (Mathematik) dargestellt.
Normalform der Koordinatendarstellung für ebene Affinitäten
Eine ebene Affinität wird auf Normalform gebracht, indem man für ihre Koordinatendarstellung eine geeignete affine Punktbasis wählt. Dazu wird, wo immer das möglich ist, der Ursprung des Koordinatensystems in einen Fixpunkt und die Achsen des Koordinatensystems in Richtung von Fixgeraden gelegt. Die folgenden Normalformen gelten für Affinitäten in der reellen affinen Ebene. Im Falle einer fixpunktfreien Affinität ist außer der Abbildungsmatrix noch ein Verschiebungsvektor zur Beschreibung der Affinität nötig.
- Achsenaffinitäten (Fixpunkt ist neben dem Ursprung jeweils der erste Basispunkt ):
- Scherung
- Schrägspiegelung
- Parallelstreckung
- Zentrale Affinitäten (Fixpunkt ist der Ursprung, als Koordinatenachsen werden womöglich die Richtungen der Eigenvektoren der Matrix gewählt.)
- Drehstreckung dabei ist der Streckfaktor und der Drehwinkel,
- Scherstreckung
- Euleraffinität









Diese Klassifikation der Affinitäten gilt auch allgemeiner bei einer affinen Ebene zum Vektorraum , wenn ein euklidischer Teilkörper der reellen Zahlen ist. Dabei gilt dann für die Matrixeinträge zusätzlich: . Bei Drehstreckungen ist im Allgemeinen – auch wenn die Ebene eine euklidische Ebene mit Bogenmaß ist – das Winkelmaß selbst kein Körperelement.




Spezialfälle
- Eine affine Abbildung eines Raumes in sich selbst wird als affine Selbstabbildung bezeichnet. Ist diese Selbstabbildung bijektiv (umkehrbar eindeutig), heißt sie Affinität.
- Eine Affinität, bei der jede Gerade zu ihrer Bildgeraden parallel ist, heißt Dilatation oder Homothetie. Die Parallelverschiebungen sind spezielle Homothetien.
- Eine affine Selbstabbildung, bei der der euklidische Abstand von Punkten erhalten bleibt, heißt Bewegung oder, insbesondere im ebenen Fall, Kongruenzabbildung, solche Bewegungen sind notwendig bijektiv, also Affinitäten.
- Wichtige affine Selbstabbildungen, die nicht bijektiv sind, sind die Parallelprojektionen, bei denen der affine Raum auf einen echten Teilraum abgebildet wird und die Einschränkung auf die Identische Abbildung ist.
- Eine affine Abbildung eines affinen Raumes in den Grundkörper dieses Raumes, der dabei als eindimensionaler affiner Raum über sich aufgefasst wird, bezeichnet man gelegentlich als affine Funktion.

Anwendungen
Graphische Anwendungen, Computergraphik
Affine Abbildungen kommen z. B. in der Kartografie und der Bildbearbeitung zur Anwendung.
- Affine Abbildungen, die häufig zum Beispiel in der Robotik oder Computergrafik Anwendung finden, sind Drehung (Rotation), Spiegelung, Skalierung (Veränderung des Maßstabs), Scherung und Verschiebung (Translation). Alle genannten Abbildungen sind bijektiv.
- Wenn dreidimensionale Körper zeichnerisch oder graphisch – also in zwei Dimensionen – dargestellt werden sollen, werden nichtbijektive affine Abbildungen benötigt.
- Hierzu gehört die Parallelprojektion mit den Parallelrissen (Grundriss, Aufriss, Kreuzriss; → siehe Normalprojektion) als Spezialfällen.
- Die Zentralprojektion ist im Allgemeinen keine affine Abbildung. Sie gehört zu den Projektiven Abbildungen, einer Verallgemeinerung der affinen Abbildungen.
- Daneben gibt es weitere graphische Darstellungen, denen keine affine Abbildung zugrunde liegt, zum Beispiel für Landkarten die Mercator-Projektionen.
- Bei der standardisierten Beschreibung von Vektorgrafiken werden ebenfalls affine Abbildungen eingesetzt (zum Beispiel im SVG-Format).
Lineare Transformation in der Statistik
Als lineare Transformation werden affine Abbildungen beispielsweise in den statistischen Methoden eingesetzt.
Verteilungsparameter einer Zufallsvariablen
Betrachtet wird eine Zufallsvariable mit dem Erwartungswert und der Varianz . Es wird eine neue Zufallsvariable gebildet, die eine lineare Transformation von ist,




wobei und reelle Zahlen sind.


Die neue Zufallsvariable hat dann den Erwartungswert


und die Varianz

Speziell gilt: Ist normalverteilt, so ist auch normalverteilt mit den obigen Parametern.
- Beispiel
Sei eine Zufallsvariable mit positiver Varianz. Nützlich ist dann eine lineare Transformation

denn nun ist mit und eine sogenannte standardisierte Zufallsvariable.


Verteilungsparameter mehrerer gemeinsam verteilter Zufallsvariablen
Betrachtet werden viele Zufallsvariablen , . Man fasst diese Zufallsvariablen im Zufallsvektor zusammen. Die Erwartungswerte werden im Erwartungswertvektor und die Varianzen und Kovarianzen in der Kovarianzmatrix aufgeführt. Es wird ein Zufallsvektor gebildet, der eine lineare Transformation von ist,









wobei ein -dimensionaler Spaltenvektor und eine ()-Matrix sind.




hat dann den Erwartungswertvektor

und die Kovarianzmatrix
- .

Speziell gilt: Ist -dimensional normalverteilt, so ist -dimensional normalverteilt mit den obigen Verteilungsparametern.
Beispiele
Die affine Transformation ist eine lineare Abbildungsmethode, bei der Punkte, gerade Linien, Geraden und Ebenen erhalten bleiben. Parallele Linien und Geraden bleiben nach einer affinen Transformation parallel.
Affine Transformationen wird typischerweise verwendet, um geometrische Verzerrungen oder Verformungen zu korrigieren, die bei nicht idealen Kamerawinkeln auftreten. Beispielsweise verwenden Satellitenbilder affine Transformationen, um Verzerrungen von Weitwinkelobjektiven, Panoramabildern und Bildregistrierungen zu korrigieren. Das Transformieren und Verschmelzen der Bilder zu einem großen, flachen Koordinatensystem ist wünschenswert, um Verzerrungen zu vermeiden. Dies ermöglicht einfachere Interaktionen und Berechnungen, bei denen keine Bildverzerrung berücksichtigt werden muss.
Die folgende Tabelle zeigt die verschiedenen affinen Transformationen am Beispiel eines Schachbrettmusters: Identische Abbildung, Parallelverschiebung, Spiegelung, Skalierung, Drehung und Scherung:[1]
| Affine Transformation | Affine Matrix | Beispiel |
|---|---|---|
| Identische Abbildung | 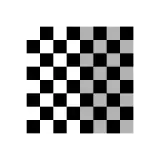 | |
| Parallelverschiebung | | |
| Spiegelung | 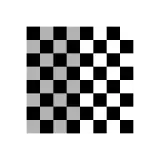 | |
| Skalierung | 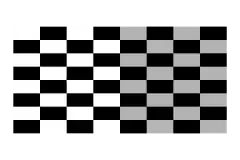 | |
| Drehung | 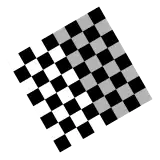 | |
| Scherung | 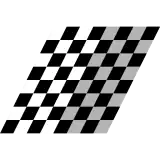 |






Literatur
- Gerd Fischer: Analytische Geometrie. 6. Auflage. Vieweg, Braunschweig/Wiesbaden 1992, ISBN 3-528-57235-3.
- Hermann Schaal, Ekkehart Glässner: Lineare Algebra und analytische Geometrie. Band 1, Vieweg, Braunschweig/Wiesbaden 1976, ISBN 3-528-03056-9.
- Uwe Storch, Hartmut Wiebe: Lehrbuch der Mathematik, Band II: Lineare Algebra. BI-Wissenschafts-Verlag, 1990, ISBN 3-411-14101-8.