Elsternbrücke (Relaissatellit)
Elsternbrücke (chinesisch 鵲橋 / 鹊桥, Pinyin Quèqiáo) ist ein Relaissatellit der Nationalen Raumfahrtbehörde Chinas (CNSA). Der Satellit operiert in einem Halo-Orbit um den Erde-Mond-Lagrange-Punkt L2 und ermöglicht die Kommunikation mit Lander und Rover der Mission Chang’e 4 auf der erdabgewandten Seite des Mondes. Sein Name leitet sich aus der Geschichte vom Hirtenjungen und dem Webermädchen ab.
| Elsternbrücke (Relaissatellit) | ||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
 | ||||||||||||||||||||||
| NSSDC ID | 2018-045A | |||||||||||||||||||||
| Missionsziel | Erdmond | |||||||||||||||||||||
| Auftraggeber | CNSA | |||||||||||||||||||||
| Trägerrakete | Changzheng 4C | |||||||||||||||||||||
| Aufbau | ||||||||||||||||||||||
| Startmasse | 449 kg | |||||||||||||||||||||
| Verlauf der Mission | ||||||||||||||||||||||
| Startdatum | 20. Mai 2018, 21:28 UTC | |||||||||||||||||||||
| Startrampe | Kosmodrom Xichang LC-3 | |||||||||||||||||||||
| ||||||||||||||||||||||
Aufbau
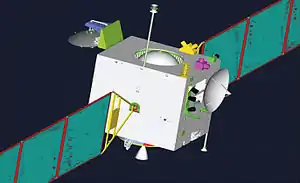
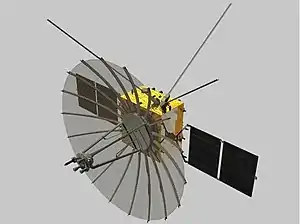
Der in betanktem Zustand 449 kg schwere Satellit[1] mit einer ursprünglich geplanten Lebensdauer von fünf Jahren beruht auf dem CAST-100-Satellitenbus der Hangtian Dong Fang Hong Satelliten GmbH.[2] Er wurde nach Plänen der Chinesischen Akademie für Weltraumtechnologie gebaut, die das Projekt Ende 2016 öffentlich vorstellte. Das Gehäuse besitzt die Maße 140 × 140 × 85 cm, dazu kommen noch zwei Solarzellenflügel mit insgesamt vier Modulen. Die Galliumarsenid-Sollarzellen liefern 780 W elektrische Leistung; für die Zeiten, wo sich der Satellit im Erdschatten befindet, steht ein Lithium-Ionen-Akkumulator mit einem Ladungsspeichervermögen von 45 Ah zur Verfügung.
Der Satellit besitzt vier Haupttriebwerke von jeweils 20 N Schubkraft sowie zwölf Lageregelungstriebwerke mit jeweils 5 N. Alle 16 Triebwerke arbeiten mit dem monergolen Raketentreibstoff Hydrazin, von dem beim Start insgesamt 105 kg in zwei Tanks von jeweils 70 l mitgeführt wurden. Seit der Satellit seinen Betriebsorbit um den Erde-Mond-Lagrange-Punkt L2 erreicht hat, erfolgt die Lageregelung hauptsächlich über vier Reaktionsräder, die nach Erreichen der Maximaldrehzahl mit den Lageregelungstriebwerken drallentsättigt, also wieder gestoppt werden. Zur Orientierung besitzt die Elsternbrücke zwei Sternsensoren sowie zwei inertiale Messeinheiten, die sowohl mit Beschleunigungssensoren als auch mit Gyrometern ausgestattet sind. Damit kann der Satellit auf 0,06° genau ausgerichtet werden, die Ausrichtung bleibt mit einer Genauigkeit von 0,005°/s stabil.
Die Elsternbrücke dient dem Lander und dem Rover Jadehase 2 der am 7. Dezember 2018 gestarteten chinesischen Mondmission Chang’e 4 als Funkrelaisstation. Zu diesem Zweck besitzt der Satellit eine auf der Oberseite des Gehäuses fest montierte, ausfaltbare Parabolantenne von 4,2 m Durchmesser mit einem Antennengewinn von 44 dBi. Aufgrund ihrer starken Richtwirkung muss die Antenne sehr genau auf die Landestelle im Von-Kármán-Krater ausgerichtet werden, was mithilfe der Lageregelungssysteme des Satelliten erfolgt.
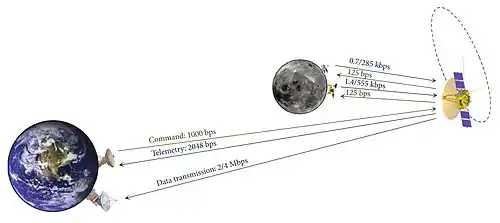
Über die Parabolantenne läuft der Funkverkehr auf dem X-Band, vor allem die Kommunikation zwischen Elsternbrücke und den Robotern auf dem Mond, wobei Lander und Rover gleichzeitig angesteuert werden können. Die Datenübertragungsrate für Steuerbefehle von der Elsternbrücke an die Roboter beträgt 125 bit/s. Wenn der Lander die Elsternbrücke mit seiner Parabolantenne anfunkt, können Telemetrie- und Nutzlastdaten mit einer Geschwindigkeit von 555 kbit/s nach oben übertragen werden, bei Verwendung der Rundstrahlantenne (welche nur für Telemetriedaten genutzt wird), beträgt die Datenübertragungsrate 1,4 kbit/s. Für den Rover liegen diese Werte bei 285 kbit/s bzw. 0,7 kbit/s. Anschließend werden die Signale im Satelliten demoduliert und dekodiert.
Während für die Steuerbefehle an die Roboter Puls-Code-Modulation, Phasenumtastung und Phasenmodulation verwendet wird, kommt bei der Datenübertragung vom Mond zur Elsternbrücke und von dort zur Erde nur die binäre Phasenumtastung zum Einsatz. Für den Funkverkehr mit der Erde wird, nach erneuter Codierung, das S-Band genutzt, wofür die Elsternbrücke einen Sender mit 43 W – der Sender für die Übertragung zum Mond hat nur 20 W – sowie eine Spiralantenne besitzt. Die von den militärischen Stationen des Chinesischen Tiefraumnetzwerks in Giyamusi, Kashgar und Argentinien an den Relaissatelliten und die Roboter gesendeten Steuersignale werden mit einer Datenübertragungsrate von 1 kbit/s übertragen, die Telemetriedaten hinunter an die Tiefraumstationen mit 2,048 kbit/s.
Die Übertragung der Nutzlastdaten an die zivilen Bodenstationen der Chinesischen Akademie der Wissenschaften in Peking, Ürümqi, Shanghai und Kunming erfolgt wahlweise mit 2 oder 4 Mbit/s. Falls das S-Band-System ausfallen sollte, können die Daten auch über das X-Band und die Parabolantenne übertragen werden, dann mit 10 Mbit/s. Während die militärischen Tiefraumstationen, die für den Betrieb des Relaissatelliten und der Roboter zuständig sind, so um den Erdball verteilt sind, dass immer mindestens eine den Mond im Blick hat, befinden sich Stand 2021 die zivilen Stationen für den Empfang der Nutzlastdaten alle in China. Für die Zeiten, wo keine dieser Stationen Sichtverbindung zum Mond hat, besitzt die Elsternbrücke einen Zwischenspeicher mit 512 Gbit Kapazität.[3]
Start und Transferbahn
 Elsternbrücke (Relaissatellit) (Volksrepublik China)
| ||||||
An der Mission Chang’e 4 beteiligte Stationen des chinesischen Tiefraumnetzwerks (rot=zivil; grün=militärisch). Nicht auf der Karte die militärische Station in Zapala, Argentinien. |
Die Elsternbrücke wurde am 20. Mai 2018 um 21:28 Uhr UTC mit einer Changzheng-4C-Trägerrakete vom Kosmodrom Xichang gestartet. 25 Minuten nach dem Start schwenkte der Satellit in einen Transferorbit zum Mond mit einem Perigäum von 200 km und einem Apogäum von 400.000 km ein, er trennte sich von der Oberstufe der Rakete und die Solarzellen-Paneele wurden entfaltet. Weitere 25 Minuten später wurde auch die Parabolantenne entfaltet.[4][3]
Im Abstand von 100 km zum Mond zündeten die Techniker im Raumfahrtkontrollzentrum Peking am 25. Mai 2018 um 13:32 UTC für 15 Minuten die vier Haupttriebwerke und brachten den Satelliten auf einen Mond-L2-Transferorbit. Vier Tage später erreichte der Satellit den L2-Punkt 65.000 km hinter dem Mond. Sowohl beim Anflug als auch im Betrieb durfte der Satellit nicht in den Funkschatten des Mondes kommen. In einem komplizierten Manöver mit mehreren Brenn- und Korrekturphasen schwenkte Elsterbrücke bis zum 14. Juni 2018 in einen sogenannten „südlichen Halo-Orbit“ mit einer z-Amplitude von 13.000 km ein.[5][6] Das bedeutet, der Orbit des Satelliten ist zur Achse Erde-Mond so geneigt, dass er im Süden mit 79.000 km wesentlich weiter vom Mond entfernt ist als im Norden mit 47.000 km.[7] Die Umlaufzeit der Elsternbrücke auf ihrem Orbit beträgt knapp 14 Tage; der Satellit kreist jeden lunaren Tag (27,3 Erdtage) zweimal um den L2-Punkt.[3]
Die Bodenstationen Giyamusi und Kashgar des Chinesischen Tiefraumnetzwerks wurden für das Manöver unter dem Kommando des Satellitenkontrollzentrum Xi’an zu einer 3000-Kilometer-VLBI-Antenne zusammengeschaltet und das Delta-DOR-Verfahren zur genauen Bahnbestimmung angewendet. Um die Sicherheit der Sonde nicht zu gefährden, wurde für die kritische Phase der Halo-Orbit-Platzierung ein abgewandeltes Delta-DOR-Verfahren gewählt, bei dem man während des relativ ruhigen Anflugs zwischen dem 21. Mai und 2. Juni den Synchronisationsfehler der Stationsuhren und die Brechung der Radiowellen in der Atmosphäre ermittelte, um einen Eindruck von den Gesetzmäßigkeiten der Veränderung über mehrere Stunden zu erhalten. In der kritischen Phase fand nur noch eine Quasarmessung am Beginn des Arbeitstages statt, danach wurde das Tracking durch Giyamusi und Kashgar für mehrere Stunden nicht mehr unterbrochen. Am 27. Mai hatten die Stationen Peking und Ürümqi mit einer ähnlichen Basislinie eine konventionelle Delta-DOR-Bahnverfolgung durchgeführt und die Gültigkeit der Behelfsmethode bestätigt. Am Ende gelang es tatsächlich, die Position der Elsternbrücke während des gesamten Prozesses auf 40 cm bzw. 3 Nanosekunden genau zu bestimmen.[8][9]
Tests und Betrieb
Obwohl es relativ schwierig ist, einen Satelliten in einem Halo-Orbit um den L2-Punkt zu betreiben – in den ersten beiden Jahren, bis zum 21. Mai 2020, waren 74 Bahnkorrekturmanöver nötig – ist dies die kostensparendste Methode, eine Verbindung mit der erdabgewandten Seite des Mondes aufrechtzuerhalten.[10] Ein Satellit in einer stationären Umlaufbahn über dem Äquator des Mondes – analog zu geostationären Satelliten – würde eine Bahnhöhe von 88.000 km benötigen, um mit der Mondrotation von 27,3 Tagen Schritt zu halten. Da aber der innere Lagrange-Punkt L1 nur 58.000 km vom Mond entfernt ist, bedeutet das, der Satellit würde im Schwerefeld der Erde fliegen und von dieser aus seiner stationären Bahn gezogen werden.
Eine andere Möglichkeit wäre gewesen, ein Netzwerk aus auf niedrigen Bahnen um den Mond kreisenden Kommunikationssatelliten aufzubauen, ähnlich wie beim Global Positioning System auf der Erde. Für eine spätere Mondstation, die langfristig besetzt bleibt, ist dies tatsächlich angedacht. Bei einer unbemannte Sonde wie Chang’e 4, mit begrenzter Missionsdauer, wurde diese Methode jedoch für zu teuer befunden.[11]
Einer der kritischen Punkte bei der Elsternbrücken-Methode ist die präzise Ausrichtung der Parabolantenne. Daher wurde zwischen dem 16. Juni und 6. Juli 2018 zunächst das Lageregelungssystem des Satelliten getestet. Dazu wurde die Parabolantenne auf das Tianma-Radioteleskop am Stadtrand von Shanghai ausgerichtet und vom Satelliten unmodulierte Trägerwellen-Signale gefunkt. Während der 20 Tage beschrieb der Satellit etwa anderthalb Umläufe auf seinem Orbit. In dieser Zeit blieb die Antenne mit einer Genauigkeit von 0,06° auf die Bodenstation ausgerichtet, mehr als dreimal so gut als die erforderlichen 0,2°.
Anschließend wurde bis Ende Juli mit in den militärischen Bodenstationen installierten elektrischen Modellen von Lander und Rover die Kommunikation zwischen Satellit und Mondoberfläche ausführlich getestet. Es wurde sowohl Funkverkehr vom Satelliten zu den Robotern als auch – mit von den Bodenstationen gesendeten Signalen – von den Robotern zum Satelliten simuliert. Die längere Signallaufzeit von der Erde im Vergleich zu den realen, auf dem Mond operierenden Geräten wurde herausgerechnet, und es zeigte sich, dass die Systeme einwandfrei funktionierten.
Nachdem Chang'e 4 am 12. Dezember die Mondumlaufbahn erreicht hatte, wurde über die Rundstrahlantenne des Landers die X-Band-Verbindung mit dem Relaissatelliten getestet. Sowohl die 125-bit/s-Verbindung vom Satelliten zum Lander als auch die 1,4-kbit/s-Verbindung vom Lander zum Satelliten funktionierten einwandfrei. Seit die Mondsonde am 3. Januar 2019 die Landung einleitete, laufen die Telemetrie und die Kommandos der Bodenstation in Peking nur noch über die Elsternbrücke, ebenso wie die Übertragung der Nutzlastdaten,[12] sowohl von Lander und Rover als auch – seit dem 14. November 2019 – vom Netherlands-China Low-Frequency Explorer, einem Langwellen-Radioteleskop mit drei Stabantennen auf dem Satelliten selbst.[3]
Missionsende
Von den beim Start mitgeführten 105 kg Hydrazin wurden während des Flugs zum Mond und vor allem bei den komplizierten Bahnmanövern zum Einschwenken in den Halo-Orbit 52,6 kg verbraucht; zum Beginn der Orbitalphase am 14. Juni 2018 hatte der Satellit noch 52,4 kg Treibstoff in den Tanks. Halo-Orbits um die Lagrange-Punkte L1 und L2 sind inhärent instabil.[13] Die Elsternbrücke muss etwa alle 9 Tage ein Bahnkorrekturmanöver durchführen, wobei jedes Mal zwischen 80 und 120 g Hydrazin verbraucht werden.[14] Ursprünglich ging man davon aus, dass man, wenn man die Geschwindigkeitsveränderungen pro Bahnmanöver aufsummierte, auf ein Gesamt- von 36 m/s pro Jahr kommen und der Treibstoff im Jahr 2023 aufgebraucht sein würde.[11] Dank präziser Ortsbestimmung durch das Chinesische Tiefraumnetzwerk bewegt sich der Umfang der einzelnen Manöver jedoch meist am unteren Rand des Bereichs. In den ersten beiden Jahren, bis Juni 2020, benötigte man nur ein von 20 m/s pro Jahr, um den Halo-Orbit aufrechtzuerhalten. Im April 2021 ging Zhang Lihua (张立华, * 1970),[15] der Chefkonstrukteur der Elsternbrücke, davon aus, dass der Relaissatellit noch bis mindestens 2026 betrieben werden könnte.

Im Jahr 2024, also zwei Jahre vor dem erwarteten Betriebsende der Elsternbrücke, soll mit der Mission Chang’e 7 ein weiterer Relaissatellit gestartet werden, der von einem stark elliptischen Orbit um den Mond selbst aus die Elsternbrücke ergänzen soll. Langfristig soll ein komplexes Netzwerk aus Kommunikations- und Navigationssatelliten in verschiedenen Orbits, sowohl um die Lagrange-Punkte L1 und L2 als auch um den Mond selbst aufgebaut werden, um die Aktivitäten von Robotern und Raumfahrern auf der Mondrückseite zu unterstützen.[3]
Einzelnachweise
- Andrew Jones: China is working on a relay satellite to support lunar polar missions. In: spacenews.com. 26. Juli 2021, abgerufen am 27. Juli 2021 (englisch).
- CAST 100 Bus. In: cast.cn. 2. Februar 2021, abgerufen am 27. Juli 2021 (englisch).
- Zhang Lihua: Development and Prospect of Chinese Lunar Relay Communication Satellite. (PDF; 3,12 MB) In: sciencemag.org. 27. April 2021, abgerufen am 27. Juli 2021 (englisch).
- 付毅飞: 嫦娥四号中继星发射成功 人类迈出航天器月背登陆第一步. In: news.china.com.cn. 22. Mai 2018, abgerufen am 5. Januar 2019 (chinesisch).
- Luyuan Xu: How China's lunar relay satellite arrived in its final orbit. In: planetary.org. 15. Juni 2018, abgerufen am 17. August 2020 (englisch).
- 冯华、蔡金曼: “鹊桥”中继星成功实施近月制动. In: paper.people.com.cn. 26. Mai 2018, abgerufen am 7. Januar 2019 (chinesisch).
- Christian Circi et al.: Halo orbit dynamics and properties for a lunar global positioning system design. In: academic.oup.com. 2. Juli 2014, abgerufen am 28. Juli 2021 (englisch).
- Wang Mei et al.: Application of Deep Space VLBI System in Queqiao Mission. In: jdse.bit.edu.cn. Abgerufen am 9. Mai 2019 (englisch).
- 王美 et al.: 深空测控网干涉测量系统在“鹊桥”任务中的应用分析. In: jdse.bit.edu.cn. Abgerufen am 9. Mai 2019 (chinesisch).
- 2年前的今天:嫦娥四号任务“鹊桥”中继星发射成功. In: clep.org.cn. 21. Mai 2020, abgerufen am 22. Mai 2020 (chinesisch).
- Steed: 鹊桥号启程,为嫦娥四号登陆月球背面架设通信桥梁. In: guokr.com. 20. Mai 2018, abgerufen am 28. Juli 2021 (chinesisch).
- Ye Peijian et al.: An overview of the mission and technical characteristics of Change’4 Lunar Probe. In: engine.scichina.com. 17. April 2017, abgerufen am 8. Januar 2019 (englisch).
- 刘磊 et al.: 地月平动点中继应用轨道维持. In: jdse.bit.edu.cn. 20. Oktober 2015, abgerufen am 30. Juli 2021 (chinesisch).
- 赵聪: 延寿!“鹊桥”还能飞10年. In: mp.weixin.qq.com. 25. April 2019, abgerufen am 25. Dezember 2020 (chinesisch).
- 张立华、吴伟仁: 月球中继通信卫星系统发展综述与展望. In: jdse.bit.edu.cn. 25. November 2018, abgerufen am 30. Juli 2021 (chinesisch).