BepiColombo
BepiColombo ist eine vierteilige Raumsonde, die am 20. Oktober 2018 um 03:45 Uhr (MESZ) zum Merkur startete.[2][3] BepiColombo ist eine Kooperation zwischen der ESA und der japanischen Raumfahrtbehörde JAXA.
| BepiColombo | ||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
 Links: Mercury Planetary Orbiter (MPO) Mitte: MMO-Sunshield-and-Interface-Struktur (MOSIF) | ||||||||||||||||||||||||||||||||||||||||
| NSSDC ID | 2018-080A | |||||||||||||||||||||||||||||||||||||||
| Missionsziel | Merkur | |||||||||||||||||||||||||||||||||||||||
| Betreiber | ||||||||||||||||||||||||||||||||||||||||
| Hersteller | Astrium[1] | |||||||||||||||||||||||||||||||||||||||
| Trägerrakete | Ariane 5 | |||||||||||||||||||||||||||||||||||||||
| Aufbau | ||||||||||||||||||||||||||||||||||||||||
| Startmasse | 4081 kg[2] | |||||||||||||||||||||||||||||||||||||||
| Verlauf der Mission | ||||||||||||||||||||||||||||||||||||||||
| Startdatum | 20. Oktober 2018, 01:45 UTC[3] | |||||||||||||||||||||||||||||||||||||||
| Startrampe | CSG, ELA-3 | |||||||||||||||||||||||||||||||||||||||
| Enddatum | 2027/28 (geplant) | |||||||||||||||||||||||||||||||||||||||
| ||||||||||||||||||||||||||||||||||||||||
Die Sonde ist nach dem Spitznamen des 1984 verstorbenen italienischen Mathematikers Giuseppe Colombo benannt, der sich um die Merkurerkundung besonders verdient gemacht hatte. Es ist die dritte Mission zum Merkur nach Mariner 10 in den Jahren 1974 und 1975 sowie dem MESSENGER-Orbiter von 2011 bis 2015.
Missionsziele
BepiColombos vielfältige Aufgaben sollen insgesamt eine umfassende Beschreibung von Merkur und Hinweise auf seine Geschichte liefern. Kameras sollen die Oberfläche in verschiedenen Spektralbereichen kartografieren, Höheninformationen ermitteln sowie die mineralogische und chemische Zusammensetzung der Oberfläche bestimmen. Strahlungen, Partikel und Spektren verschiedener Arten und Wellenbereiche sowie das Schwerefeld sollen gemessen werden. Es soll geklärt werden, ob Merkur einen festen oder geschmolzenen Kern hat. Die Sonde soll auch Form, Ausdehnung und Herkunft des Magnetfelds ermitteln.
Zu den besonderen Herausforderungen gehört Reise und Betrieb in Sonnennähe unter starker Licht-, Wärme- und Partikelstrahlung und die Notwendigkeit die kinetische Energie in einer mehrjährigen Reise in Richtung Merkur mit neun Swing-by Manövern und einem Ionenantrieb effizient abzubauen. Bei der Entwicklung spielte die beschleunigte Alterung der Komponenten, die Kühlung und die Abschirmung der Instrumente gegen Streustrahlung eine wichtige Rolle.
Technik
Überblick
BepiColombo ist beim Start als Mercury Composite Spacecraft (MCS) aus vier Teilen zusammengesetzt:
- dem Transfermodul (Mercury Transfer Module, MTM) – in Startlage zuunterst,
- darauf aufbauend zwei verschiedene Orbiter, samt einem Verbindungsteil zwischen diesen beiden:
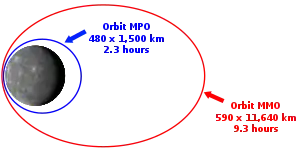
- In Startlage unten sitzt der Fernerkundungsorbiter (Mercury Planetary Orbiter, MPO; dreiachsenstabilisiert, Hydrazinantrieb); er soll in eine 400 km × 1.500 km messende (die niedrigere) polare Umlaufbahn um den Merkur einschwenken.
- Ganz oben sitzt der Magnetosphärenorbiter, (Mercury Magnetospheric Orbiter, ehemals MMO nun MIO genannt; spinstabilisiert, Kaltgastriebwerke), sein Ziel ist eine höhere, ebenfalls polare Umlaufbahn mit den Parametern 600 km × 12.000 km.
- Zwischen diesen Orbitern liegt das Sonnenschild-und-Zwischenstück (MMO-Sunshield-and-Interface-Struktur, MOSIF), das als Hitzeschild für MIO dient und elektrisch und mechanisch die Verbindung zwischen MPO und MIO bildet.
Gestartet und zum Merkur geflogen werden MPO, MOSIF und MIO übereinander montiert auf dem MTM als MCS (Mercury Composite Spacecraft). BepiColombo wog als MCS beim Start vollgetankt 4081 kg. Beim Abstieg im Schwerefeld der Sonne hin zur Merkurbahn liegt MTM mit dem zum Bremsen genutzten Triebwerk zur Sonne hin, sodass MOSIF MIO von der intensiver werdenden Sonnenstrahlung schützen kann.
Ursprünglich sollte auch ein Lander mitfliegen, der allerdings im November 2003 aus Kostengründen gestrichen wurde.
Mercury Transfer Module (MTM)

Das im Auftrag der ESA entwickelte Transfermodul mit einer Startmasse von ca. 1100 kg[2] transportiert während des Flugs bis zum Merkur beide Orbiter und einen Teil der Treibstoffe. Das MTM wird während des Flugs vom Computer des MPOs gesteuert. Zur Kommunikation werden Sender und Antenne des MPO benutzt. Das MTM hat drei einfache „Selfie-Kameras“ mit kurzer Brennweite und einer Auflösung von 1024 × 1024 in schwarzweiß. Mit ihnen kann die korrekte Entfaltung der Solarpanele und die Ausrichtung der Antenne überwacht werden, als Nebenprodukt kann man bei Swing-by-Manövern die Planeten im Hintergrund erkennen.
Das MTM verfügt über zwei verschiedene Antriebe: Der Ionenantrieb wird in wochen- und monatelangen Brennphasen bei kleinem Schub zwischen den Swing-By manövern eingesetzt, um das Raumschiff abzubremsen. Der chemische Antrieb wird zur Lageregelung eingesetzt, zur Entsättigung der Reaktionsräder und für das Einschwenken in die Merkurumlaufbahn.
Ionenantrieb
Für die interplanetaren Phasen gibt es vier redundante solar-elektrisch betriebene QinetiQ-T6-Ionentriebwerke vom Typ Kaufmann. Dieses Triebwerk der 5 kW-Klasse wiegt 8,5 kg und das Ionengitter hat einen Durchmesser von 22 cm. Für die Mission wurde die variable Schubkraft in Stufen zwischen 75 bis 145 mN definiert. Das Triebwerk an sich kann mit Schubkraft zwischen 24 mN bis 230 mN betrieben werden, unterliegt aber bei höherem Schub einem verstärkten Verschleiß. Der spezifische Impuls ist mehr als 4000 s.[4] Als Stützmasse dienen 580 kg Xenon für ein ΔV von 5400 m/s, das in drei Tanks mitgeführt wird. Bis zu zwei dieser vier Triebwerke können gleichzeitig in Betrieb sein. Diese Triebwerke ionisieren Xenon und beschleunigen die dabei entstehenden Xenon-Ionen durch Hochspannungsgitter auf eine Geschwindigkeit von 50.000 Meter pro Sekunde. Die Ionentriebwerke sind schwenkbar montiert. Der Schwerpunkt des Raumschiffs verändert sich, wenn die Stützmasse und Treibstoffe verbraucht werden. Durch die beweglichen Triebwerke kann der Schub immer auf den Schwerpunkt ausgerichtet werden – unabhängig davon, ob ein oder zwei Triebwerke eingesetzt werden und unabhängig davon, welche der vier Triebwerke in Betrieb sind.[5]
Für den Betrieb der Ionentriebwerke und der übrigen Komponenten verfügt das MTM über 42 m2 Solarmodule mit einer Leistung von etwa 15 kW.[2] Es ist darin eingeplant, dass die Solarzellen altern und dass die Paneele nicht immer voll zur Sonne ausgerichtet werden können.
Chemischer Antrieb
Zusätzlich hat das MTM 24 chemische Triebwerke mit je 10 N Schub für Lage- und Orbitkontrolle während der Swing-by-Manöver,[6] für das Entsättigen der Reaktionsräder während der Mission und für das Einbremsen in die Umlaufbahnen. Das MTM hat eine Ladung von 157 kg chemischem Treibstoff für ein ΔV von 68 m/s.
Das Transfermodul wird nur bis zur Ankunft am Merkur benötigt. Bevor die Sonden in die Merkurumlaufbahnen eintreten, wird das Transfermodul abgetrennt und wird in einer Umlaufbahn um die Sonne bleiben.[5]

Mercury Planetary Orbiter (MPO)

Der MPO ist der europäische Beitrag zu der Mission. Der Satellitenkörper der Raumsonde ist 2,4 m breit, 2,2 m tief, 1,7 m hoch und besitzt einen 3,7 m breiten Radiator. Der Solargenerator hat eine Fläche von 8,2 m2 und ist im entfalteten Zustand 7,5 m lang. Betankt wog der MPO beim Start ca. 1200 kg.[2] Während MTM in Betrieb ist, wird der Solargenerator des MPO mit den schmalen Seiten in Richtung Sonne gedreht. Dieses minimiert das Drehmoment auf die Fläche durch den Sonnenwind, dient der Temperaturkontrolle, verhindert, dass die Solarzellen vorzeitig altern und gibt den Blick für die Sonnensensoren frei. Das MTM übernimmt in dieser Zeit für MPO und MIO die Stromversorgung.
Instrumente des MPO
Die wissenschaftliche Nutzlast des MPO wiegt 85 kg[2] und umfasst elf Instrumente, zehn europäische und ein russisches:
- BELA (BepiColombo Laser Altimeter)
- Laser-Höhenmesser mit einer Ortsauflösung von 50 m. Dieses Instrument wird vom DLR in Zusammenarbeit mit der Universität Bern, dem Max-Planck-Institut für Sonnensystemforschung und dem Instituto de Astrofisica de Andalucia verantwortet. Das Instrument hat einen Neodym-dotierten Yttrium-Aluminium-Granat-Laser, der sehr kurze 50-mJ-Laserimpulse mit einer Wellenlänge von 1064 nm zur Merkuroberfläche senden wird. Das reflektierte Laserlicht wird von einer Lawinen-Photodiode im Brennpunkt eines Teleskops empfangen.[7][8] Ein wichtiger Teil der Entwicklung war der Schutz des Instruments gegen die Hitze und die intensive Sonnenstrahlung sowie der Ausschluss von Streulicht. Das Messprinzip ist eine Laufzeitmessung des Laserstrahls, bis der reflektierte Strahl wieder empfangen wird. Das Instrument kann bis zu einer Höhe von 1000 km über der Oberfläche arbeiten. Aufgaben und erwartete Ergebnisse des Instruments:
- MERTIS (Mercury Radiometer and Thermal Infrared Spectrometer)
- Infrarotdetektor und -spektrometer mit dem Zweck, eine mineralogische und eine Temperatur-Landkarte Merkurs zu erstellen. Das Instrument beobachtet abwechselnd die Oberfläche, den Weltraum und zwei Schwarzkörperstrahler mit Temperaturen von 300 K und 700 K als Referenzen. Anhand ungekühlter Mikrobolometer-Technologie und in einer Wellenlänge von 7 bis 14 µm arbeitend soll er in der Lage sein, räumliche Auflösungen von 500 m für die mineralogische und von 2000 m für die Temperatur-Landkarte zu liefern.[9] Das Instrument hat einen Beobachtungswinkel von 4° und eine spektrale Auflösung von bis zu 90 nm. Die gesamte Oberfläche soll mit einer räumlichen Auflösung von maximal 500 m erfasst werden, aber 5–10 % der Oberfläche sollen mit Auflösung besser als 500 m aufgenommen werden.
- PHEBUS (Probing of Hermean Exosphere By Ultraviolet Spectroscopy)
- Ultraviolett-Spektrometer mit dem Zweck, Merkurs Exosphäre zu analysieren und ihr dynamisches Verhalten, gekoppelt an Oberfläche und Magnetosphäre des Planeten, besser zu verstehen. Das Instrument besteht aus einem EUV-Detektor, arbeitend im 55–155-nm-Wellenlängenbereich, und einem zweiten FUV-Detektor für den 145–315-nm-Bereich mit Erweiterung für die NUV-Linien in 404,4 und 422,8 nm von Kalium und Calcium. Insgesamt können sie eine spektrale Auflösung von 1 nm erreichen.[10] Das Instrument kann die Elemente Si, Mg, Fe und die Edelgase Ar, Ne sowie deren räumlich-zeitliche Verteilung in der Exosphäre erkennen. Die wissenschaftliche Entwicklung und der Bau des gesamten Instruments geschahen in der Verantwortung des französischen LATMOS, wobei CNES das Instrument als Generalunternehmen in Auftrag gab. Beiträge zum Instrument stammen von der Universität Tokyo in Japan, vom russischen Raumforschungsinstitut IKI und vom CNR-IFN-LUXOR-Labor in Italien. Die Detektoren in der Größe 25 × 40 mm bestehen aus Caesiumiodid (CsI) für EUV und Caesiumtellurid (Cs2Te) für FUV.[11]
- SIMBIO-SYS (Spectrometer and Imagers for MPO BepiColombo Integrated Observatory System)
- Kamerasystem für Stereo-, Hochauflösungs- und Multispektralaufnahmen, dessen Zweck die geologische Analyse der Oberfläche, die Untersuchung von Vulkanismus und Tektonik, des Alters und der Bestandteile sowie allgemeine Geophysik ist. Der eingebaute Stereo Channel (STC) verfügt über vier spektrale Kanäle (panchromatisch 650 + 550, 700 und 880 nm) und hat eine Auflösung von bis zu 50 m/Pixel; der ebenfalls eingebaute High spatial Resolution Imaging Channel (HRIC) kann im gleichen Spektralbereich wiederum bis zu 5 m/Pixel erreichen; der Visible Infrared Hyperspectral Imager Channel (VIHI) wird sich auf sichtbares und nahes Infrarot (400 bis 2000 nm mit Erweiterung für 2200 nm) konzentrieren.[12]
- SIXS (Solar Intensity X-ray and particles Spectrometer)
- Röntgen- und Partikeldetektoren (Protonen, Elektronen) mit dem Ziel, die variable Signatur im Röntgenbereich der Planetoberfläche durch Messungen der Sonnenstrahlung besser zu verstehen. Aus den SIXS-Messungen können zuverlässige Schätzungen der Planetoberflächenbestrahlung gewonnen werden, die danach mit den verwandten MIXS-Messungen korreliert werden sollen. Das Instrument kann Spektralmessungen im Röntgen-Energiebereich von 1 bis 20 keV mit einer zeitlichen Auflösung von bis zu einer Sekunde durchführen und gleichzeitig Spektra von Protonen (von 0,33 bis 30 MeV) und Elektronen (von 50 keV bis 3 MeV) mit Zählraten von bis zu 20000 cps aufnehmen.[13]
- MIXS (Mercury Imaging X-ray Spectrometer)
- Teleskop mit Kollimator für die Röntgenfluoreszenz der Merkuroberfläche, das bei der Bestimmung ihrer elementaren Zusammensetzung helfen soll. MIXS-Messungen sollen mit Messungen des Partnerinstruments SIXS kalibriert werden, um dann die Ergebnisse auf dem Planeten zu kartographieren. Das MIXS-Teleskop (MIXS-T) hat ein sehr enges Sichtfeld (1° FoV), während der Kollimator (MIXS-C) mit 10° arbeitet. Das Instrument wurde entwickelt und konstruiert von der Universität Leicester, dem Max-Planck-Institut für Sonnensystemforschung (MPS) und dem Max-Planck-Institut für extraterrestrische Physik (MPE).[14][15]
- SERENA (Search for Exospheric Refilling and Emitted Natural Abundances)
- Das Instrument SERENA besteht aus einem vierteiligen Satz an Teilchendetektoren, die die dynamischen Prozesse des gekoppelten Systems Exosphäre-Magnetosphäre-Oberfläche analysieren sollen. Zum einen wird das im Discovery-Programm der NASA entwickelte Strofio-Massenspektrometer[16] (STart from a ROtating FIeld mass spectrOmeter) die Gasbestandsteile der Exosphäre mittels Flugzeitmassenspektrometrie erforschen. Des Weiteren wird MIPA (Miniature Ion Precipitation Analyser) den Sonnenwind und die Prozesse beobachten, durch die sich Plasma auf der Oberfläche niederschlägt. PICAM (Planetary Ion CAMera) ist ein Ionen-Massenspektrometer, das sich auf die neutralen Partikel mit Energien bis 3 keV konzentrieren wird, die die Planetenoberfläche zunächst verlassen und erst anschließend ionisiert und durch die Merkurumgebung transportiert werden. PICAM wird vom Institut für Weltraumforschung (IWF), vom Institut für Weltraumforschung der Russischen Akademie der Wissenschaften (IKI), vom Institut de recherche en sciences de lenvironnement (CETP/IPSL), vom Europäischen Weltraumforschungs- und Technologiezentrum (ESTEC), vom Research Institute for Particle and Nuclear Physics (KFKI-RMKI) und vom Max-Planck-Institut für Sonnensystemforschung (MPS) entwickelt.[17] ELENA (Emitted Low-Energy Neutral Atoms) wird dabei auf die aus der Oberfläche stammenden neutralen Gasmoleküle im Bereich von 20 eV bis 5 keV achten.[18]
- MPO-MAG (MPO Magnetometer)
- Einer von zwei digitalen Fluxgate-Magnetometern, aus denen das wissenschaftliche Instrument MERMAG (MERcury MAGnetometer) besteht. Der andere Magnetometer MIO-MAG befindet sich am Bord von MIO und beide zusammen haben das Ziel, Ursprung, Entwicklung und Zustand des Planeteninneren durch die vollständige Charakterisierung seines magnetischen Feldes besser zu verstehen. Die Geräte werden mit einer Abtastrate von 128 Hz das schwache Merkur-Magnetfeld messen und alle Terme dieses Feldes (bis zum Oktupol-Grad) präzise erfassen.[19] Nach den ersten erfolgreichen Messungen des Magnetfelds beim Vorbeiflug an der Erde wurde beschlossen, das Instrument für die überwiegende Zeit des Flugs in Betrieb zu lassen, um damit den Sonnenwind zu erfassen. In der Zusammenarbeit mit dem ESA-eigenen Solar Orbiter ergeben sich dadurch neue Synergien bei der Untersuchung der Sonnenumgebung. Außerdem untersucht die Parker Solar Probe der NASA den Sonnenwind. Die drei Sonden befinden sich räumlich an verschiedenen Stellen und verfügen jeweils über ein Magnetometer. Gemeinsam können sie zur Untersuchung der räumlichen und zeitlichen Ausbreitung von koronalen Massenauswürfen beitragen.[20]
- ISA (Italian Spring Accelerometer)
- Beschleunigungsmesser, der in Verbindung mit MORE eine Vorhersage der allgemeinen Relativitätstheorie überprüft.
- MORE (Mercury Orbiter Radio-science Experiment)
- Ka-Band-Transponder, siehe ISA. Der Transponder ist an sich kein eigenes Instrument, jedoch können damit Radiowellenexperimente in unterschiedlichen Frequenzen gemacht werden.
- MGNS (Mercury Gamma-ray and Neutron Spectrometer)
- Detektor zum Nachweis von strahlungsinduzierten Sekundärneutronen und Gammastrahlung auf der Merkuroberfläche.
Kommunikation
MPO verfügt über zwei unbewegliche Niedergewinnantennen für X-Band, eine bewegliche Mittelgewinnantenne für X-Band und eine bewegliche Hochgewinnantenne mit 1 m Durchmesser. Die beiden Niedergewinnantennen können aus jeder Lage senden und empfangen und dienen in der Startphase und in Erdnähe zur Kommunikation, außerdem zur Sicherung der Notfallkommunikation in großer Entfernung. Die Mittelgewinnantenne wird hauptsächlich in den langen Phasen zwischen den Planetenbegegnungen eingesetzt und wenn die Sonde in den Sicherheits- oder Notfallbetrieb geht. Die Hochgewinnantenne wird in den interplanetaren Phasen eingesetzt, wenn ein höheres Datenvolumen anfällt. Sie kann im X-Band senden und empfangen und im Ka-Band senden.
Die 35-Meter-Antenne des ESTRACK-Netzwerks in Cebreros ist für Empfang im Ka-Band eingerichtet und ist nach der Planung die primäre Anlage zur Kommunikation in allen Missionsphasen, seither ist die Station in Malargüe für Ka-Band hinzugekommen. Für den Eintritt in die Umlaufbahn und in anderen kritischen Phasen soll auch New Norcia unterstützen. Die beiden japanischen Radiostationen Usuda Deep Space Center in der Nähe von Saku und Uchinoura Space Center nahe Kimotsuki sollen als Backup dienen und werden bei speziellen Messungen genutzt. Zum Startzeitpunkt im Oktober 2018 hatte die JAXA noch keine Deep-Space-Antenne mit Empfänger für das Ka-Band. Im April 2021 wurde mit der Misasa Deep Space Station eine neue 54-Meter-Antenne mit Ka-Empfang in Betrieb genommen. Die 65-Meter Antenne wird mit einem Ka-Band-Empfänger nachgerüstet. Die datenintensive Phase und der verstärkte Einsatz im Ka-Band beginnt erst mit dem Wissenschaftsbetrieb mit der Ankunft bei Merkur ab Ende 2025.
Navigation und Lagekontrolle
Das sogenannte Attitude and Orbit Control System (AOCS) verfolgt mehrere Aufgaben. Es muss einerseits die Navigation erfüllen, aber andererseits das Raumfahrzeug so ausrichten, dass auch im Fall einer Betriebsstörung keine Komponenten durch die Strahlung beschädigt werden. Die unterschiedlichen Phasen des Anflugs erfordern dabei unterschiedliche Ausrichtungen. AOCS verfügt zur Navigation und Lagekontrolle über mehrere Systeme:
- Drei Sterntracker mit eigener Elektronik und Streulichtblenden. Die Sterntracker haben Schutzklappen im Gehäuse. Für den Fall, dass die Kontrolle über MPO verloren geht, werden diese automatisch geschlossen, damit die Sensoren nicht durch die intensive Sonneneinstrahlung zerstört werden.
- Zwei Trägheitsmesssysteme, darin enthalten sind vier Gyroskope und vier Beschleunigungsmesser in tetraedrischer Anordnung und die zugehörige Elektronik.
- Zweimal vier redundante Sonnensensoren.
- Vier Reaktionsräder mit doppelter Elektronik. Drei Reaktionsräder sind zum Betrieb notwendig.
- Zwei redundante Sätze von vier 22-Newton-Antriebsdüsen. Als Treibstoff verwenden diese MON3, einen Mix aus Stickstofftetroxid mit 3 % Stickoxid und Hydrazin. Diese Triebwerke dienen zum Abbremsen und Einschwenken in eine hohe Merkurumlaufbahn. Danach werden damit die Umlaufbahnen für MIO und MPO erniedrigt.
- Zwei redundante Sätze von vier 5-Newton-Hydrazin-Antriebsdüsen für Lagekontrolle und Entsättigung der Reaktionsräder.
- High and Medium Gain Antenna Pointing Mechanism (HGAPM/MGAPM), diese kompensieren automatisch die Störungen, die die Ausrichtung der Antennen verursachen.
- Drei Solar Array Drive Mechanismen (SADM), diese bewegen die beiden Solarpanele des MTM und das des MPO.
- Solar Electrical Propulsion Subsystem (SEPS), solange der Ionenantrieb des MTM in Bereitschaft ist.
Insgesamt bedient AOCS 58 Lagekontrollelemente und verarbeitet die Daten von 15 Sensoren.
Für den Fall, dass der redundante Bordcomputer eine Störung aufweist, muss die korrekte Ausrichtung des Raumfahrzeugs jederzeit weiterhin gewährleistet werden, um die Überhitzung und den Ausfall von Komponenten zu verhindern. Aus diesem Grund gibt es die Failure Correction Electronik (FCE), diese bewahrt die Informationen aus den Trägheitsmesssystemen und den Sterntrackern über die Ausrichtung des Raumfahrzeugs, solange innerhalb von wenigen Minuten der Bordcomputer neu gestartet oder auf den sekundären Bordcomputer gewechselt wird. FCE sorgt in diesem Fall auch, dass die Solarpanele korrekt ausgerichtet bleiben. FCE kann in dieser Zeit nicht die Sonnensensoren auslesen und die Sterntracker sind zur Sicherheit geschlossen, aber die Informationen des Trägheitsmessystems können die Lageveränderungen für diese Zeit gegenüber der letzten gemessenen Position mit ausreichender Genauigkeit fortschreiben, bis der Bordcomputer wieder verfügbar ist und alle Navigationssysteme wieder ausgelesen werden können.
AOCS hat mehrere Betriebsarten:
- Sun Acquisition and Survival Mode wird benötigt, um direkt nach dem Start die Sonne zu finden und die Sonde korrekt auszurichten. Zur Lagekontrolle werden nur die Steuerdüsen verwendet. Die Sonde rotiert dabei um die Achse, die zur Sonne zeigt. Dieser Modus würde sonst nur noch nach einer Computerstörung ausgeführt.
- Dann wird in den Safe and Hold Mode gewechselt. In diesem Betriebszustand werden die Reaktionsräder zur Lagekontrolle eingesetzt, dadurch verringert sich der Treibstoffverbrauch. Außerdem wird zum Empfang die Mittelgewinnantenne auf die Erde ausgerichtet, optional auch die Hochgewinnantenne. AOCS entsättigt in diesem Modus die Reaktionsräder automatisch.
- Nur durch einen Befehl von der Erde wird von Save and Hold in den Normalbetrieb gewechselt. Im Normalbetrieb werden die Reaktionsräder nur auf Befehl entsättigt, denn die Steuerdüsen sind in diesem Fall abgeschaltet und müssen vor dem Einsatz vorgewärmt werden. Die Rotation wird gestoppt und sowohl Mittel- als auch Hochgewinnantenne können betrieben werden.
- Orbit Control Mode wird eingesetzt, solange die chemischen Triebwerke die Flugbahn stark verändern. Es gibt zwei separate Steuereinheiten, eine zur Steuerung der Triebwerke des MTM und eine für MPO, die in Betrieb geht, sobald die Transferstufe abgeworfen wurde.
- Der Electric Propulsion Control Modus wird benötigt, um die Ionentriebwerke zu betreiben. Alle Funktionen des Normalbetriebs laufen weiter, aber die Reaktionsräder werden, wenn möglich, durch die Ionentriebwerke entsättigt. Die chemischen Triebwerke sind abgeschaltet und es ist möglich, dass in dieser Zeit weder die Mittelgewinn-, noch die Hochgewinnantenne zur Erde zeigen kann. In diesem Modus arbeitet die Sonde weitgehend autonom und benötigt keine Steuerbefehle von der Erde. Es gibt eine Onboard-Fehlererkennung, die Probleme erkennen kann und automatische Prozeduren ausführt zur Isolation des Fehlers und zur automatischen Fehlerkorrektur oder zum Wechsel auf redundante Systeme.[21]
Mercury Magnetospheric Orbiter (MIO, zuvor MMO)

Der MMO wurde unter japanischer Verantwortung entwickelt und im Juni 2018, vor dem Start in MIO umbenannt. Mio, japanisch bedeutet Wasserstraße, Wasserweg, Fahrrinne und spielt an auf die stete Bewegung der Sonde gegen den Partikelstrom des Sonnenwinds.[22] Die Raumsonde mit oktogonalem Querschnitt ist 1,06 m hoch, hat einen Durchmesser von 1,8 m und wog beim Start etwa 255 kg. Bei der Abtrennung vom MPO aus dem MOSIF wird MIO in Rotation mit einer Rate von 15 Umdrehungen pro Minute versetzt.[23][24] Anschließend werden zwei fünf Meter lange Masten zur Magnetfeldvermessung und vier 15 m lange Drahtantennen zur Vermessung des elektrischen Feldes[25] ausgefahren.
Für die Kommunikation hat MIO eine flache Phased-Array-Antenne von 80 cm Durchmesser als Hochgewinnantenne im X-Band. Eine Parabolantenne wäre zwar zur Datenübertragung effektiver, aber da auf die Antenne zugleich intensive Licht- und Infrarotstrahlung einwirkt, könnte sich die Strahlung an unerwünschter Stelle bündeln und den Orbiter schädigen. Die Antenne wird mit einem Motor in eine Gegenrotation mit derselben Umdrehungsrate versetzt, so dass sie für die Kommunikation stabil in Richtung Erde ausgerichtet werden kann. MIO hat außerdem zwei kleine Mittelgewinnantennen im X-Band als Backup.
Zur Lageerkennung dienen Sonnensensoren an den Seitenpanelen und ein Sternsensor an der Unterseite des Orbiters. Zur Lageregelung dienen ein Kaltgassystem und ein passiver Nutationsdämpfer im Zentralzylinder.[26]
MIO trägt fünf wissenschaftliche Instrumente (45 kg) – vier japanische und ein europäisches:
- MIO-MAG (MIO Magnetometer, auch MMO-MGF)
- Soll zusammen mit dem MPO-MAG das magnetische Feld von Merkur und dessen Magnetosphäre sowie den interplanetaren Sonnenwind vermessen.[27] Beide Magnetometer MIO-MAG (MMO-MGF) und MPO-MAG und weiters das Ionenspektrometer PICAM auf MPO entstanden unter führender Beteiligung des Instituts für Weltraumforschung, Graz und sind durchgehend eingeschaltet.[28]
- MPPE (Mercury Plasma Particle Experiment)
- Das Instrument dient der Untersuchung des Plasmas und der neutralen Teilchen von Merkur sowie von dessen Magnetosphäre und des interplanetaren Sonnenwindes. Es handelt sich um ein Instrumentenpaket, bestehend aus sieben verschiedenen Sensoren: drei Sensoren für Elektronen, drei für Ionen und ein Sensor für Neutralteilchen.[29] Die Bezeichnungen der Sensoren sind: ENA (Energetic Neutral Atom), HEP-e (High Energy Particles – electron), HEP-i (High Energy Particles – ion), MEA (Mercury Electron Analyzer), MIA (Mercury Ion Analyzer) und MSA (Mass Spectrum Analyzer). Der MSA-Sensor ist ein TopHat-Ionenspektrometer, das gemeinsam entwickelt wird vom Laboratory of Plasma Physics (LPP), dem Max-Planck-Institut für Sonnensystemforschung (MPS), der IDA-TU Braunschweig und dem Institute of Space and Astronautical Science (ISAS).[30]
- PWI (Mercury Plasma Wave Instrument)
- Ein Plasmawellendetektor zur Untersuchung des elektrischen Feldes, der elektrischen Wellen und der Radiowellen der merkurischen Magnetosphäre und des interplanetaren Sonnenwindes.[31]
- MSASI (Mercury Sodium Atmosphere Spectral Imager)
- Spektrometer zur Untersuchung der dünnen Natriumatmosphäre am Merkur.[32]
- MDM (Mercury Dust Monitor)
- Staubdetektor zur Untersuchung des merkurischen, interplanetaren und interstellaren Staubes im Umfeld von Merkur.[25]
Bau und Testphase
Im Januar 2008 erhielt das auf die Entwicklung und den Bau von Satelliten spezialisierte Unternehmen Astrium in Friedrichshafen offiziell den Projektauftrag im Volumen von 350,9 Millionen Euro. Die Gesamtkosten inklusive Start und Betrieb bis 2020 wurden im Jahr 2008 auf 665 Millionen Euro geschätzt.[33] Die anfänglichen Designstudien enthielten noch einen Lander, der aber aus Kostengründen gestrichen wurde.
Der japanische MIO wurde in einem speziell modifizierten Weltraumsimulator der ESA im ESTEC getestet, mit der Bestrahlung von 10 Solarkonstanten, wie sie in der Merkurumlaufbahn herrschen. Seine Außenhaut musste dabei über 350 °C aushalten.[34] Zwischen dem 12. September 2011 und dem 6. Oktober 2011 folgten Tests des MPO im Weltraumsimulator.[35]
Im August 2018 konnte das Qualification Acceptance Review erfolgreich abgeschlossen werden und das MCS wurde am 30. August 2018 für die Betankung mit den chemischen Treibstoffen freigegeben.[36]
Als Trägerrakete war anfangs eine Sojus ST-B mit Fregat-Oberstufe vorgesehen, die von Kourou starten sollte, dann wurde jedoch aus Gewichtsgründen auf eine Ariane 5 ECA gewechselt.
Start und Flug bis Merkur
Missionskontrolle
Die Missionskontrolle liegt unter Führung der ESA vom Start bis zur Ankunft bei Merkur alleine beim ESOC in Darmstadt. Die wissenschaftlichen Daten werden in Villafranca bei Madrid im ESAC gesammelt, archiviert und ausgewertet. Sobald MIO abgetrennt wird, übernimmt Jaxa die Kontrolle über MIO und kommuniziert über die Station in Usuda, während MPO weiterhin von ESOC gesteuert wird. Die wissenschaftlichen Daten von MIO werden in einem eigenen Wissenschaftszentrum der Jaxa ausgewertet. Einrichtungen der Jaxa sollen während der Mission als Backup dienen.
Start
Der ursprünglich bereits für 2013 vorgesehene Starttermin musste mehrfach verschoben werden, da die Entwicklung diverser Komponenten für die starke thermische Belastung in Sonnennähe deutlich länger dauerte als geplant. Die vorgesehene Technologie für die Solarpanele alterte zu schnell, sodass eine neue Lösung gesucht und im Langzeittest bestehen musste.
Der erfolgreiche Start von BepiColombo mit der Ariane 5 ECA VA-245 und einer Nutzlast 4081 kg erfolgte am 20. Oktober 2018.[37] Die Ariane 5 ECA setzte wie geplant BepiColombo mit einer hyperbolischen Exzessgeschwindigkeit von 3,475 km/s aus.[38] Um Treibstoff zu sparen, sind auf der sieben Jahre langen Reise neun Swing-by-Manöver an Erde, Venus und Merkur geplant.[2] Dazwischen sind längere Brennphasen des Ionenantriebes vorgesehen. Während des Anflugs kontrolliert MPO sowohl MIO, als auch das Transfermodul, das während dieser Zeit die elektrische Versorgung für alle Teile übernimmt. MIO ist während des Flugs nahezu inaktiv und wird nur für Testzwecke aktiviert.
Tests
Am 20. November 2018 wurden zum ersten Mal die QinetiQ-T6-Ionentriebwerke getestet. Es war das erste Mal, dass dieses Triebwerksmodell im Weltall betrieben wurde. Dabei wurde eines nach dem anderen in Betrieb genommen. Die Inbetriebnahme und die daraus folgenden Effekte wurden von der Erde aus überwacht, solange die Sonde noch nahe genug bei der Erde für eine direkte Steuerung war. Die Triebwerke wurden zunächst bei minimalem Schub von 75 und dann schrittweise bis zum maximalen Schub von 125 mN betrieben und dieser über fünf Stunden beibehalten. Die Messungen ergaben eine maximale Abweichung von 2 % von den erwarteten Werten. Die Ionentriebwerke sollen in 22 Brennphasen eingesetzt werden, die bis zu zwei Monate dauern. Die Triebwerke pausieren dabei einmal in der Woche für acht Stunden. Diese Zeit wird für die genaue Positionsbestimmung und zum Datenaustausch mit der Bodenstation genutzt.[39]
Im Juli 2019 wurden die beiden Mercury Electron Analyzers (MEA1 und MEA2, Teil des Mercury Plasma/Particle Experiment MPPE)[40] in Betrieb genommen und konnten erste erfolgreiche Messungen durchführen, obwohl sich MIO hinter dem thermalen Schutzschild MOSIF befand.[41]
Vorbeiflug an der Erde

Am 8. April 2020 wurde das Durchfliegen eines sogenannten Gravitationsschlüsselloches anvisiert, einer kritischen Raum-Zeit-Tor-Situation.[42] Am 10. April 2020 wurde wie geplant das Swing-by-Manöver an der Erde vollzogen, dabei kam die Sonde der Erde bis auf 12.689 km nahe. Sechs der elf Instrumente des MPO konnten getestet werden und sieben Sensoren von drei Instrumenten des MIO waren in Betrieb, um Daten zu erfassen. Außerdem waren die drei Selfiekameras des MTMs in Betrieb, mit denen Aufnahmen von der Erde gelangen. Zur Zeit des Vorbeiflugs operierte MOC in Darmstadt unter Sicherheitsmaßnahmen, um Infektionen durch das Corona-Virus unter der Belegschaft einzuschränken. Der wissenschaftliche Betrieb von einigen ESA-Missionen wurde zeitweise eingestellt, Tätigkeiten soweit möglich ins Home-Office verlagert und im MOC selbst das Personal auf das Minimum reduziert und besondere Regeln für den sozialen Abstand angewandt. Trotzdem wurde der Vorbeiflug planmäßig durchgeführt.[43]
- MERTIS konnte mit der sekundären Öffnung für den Weltraum die Wärmestrahlung des Monds aus 700.000 km Entfernung mit wenigen Pixeln Auflösung erfassen. Während des Flugs ist die primäre Öffnung vom MTM verdeckt.[44]
- MPO-MAG konnte das Erdmagnetfeld erfassen. Die Daten können für die Kalibrierung des Instruments verwendet werden. Am Tag der Messung gab es nur wenig Sonnenwind. Der Eintritt in die Magnetosphäre, die Bugstoßwelle und der Durchflug durch die turbulente Zone des Magnetosheath konnten erfasst werden, dann der Durchflug durch die Magnetopause, die alleine vom Erdmagnetfeld dominiert wird und anschließend wieder in umgekehrter Reihenfolge beim Verlassen.[20]
Zwei Swing-by-Manöver Venus
Die Sonde erreichte Venus am 15. Oktober 2020, um dort ein erstes Swing-by-Manöver durchzuführen.[45][46] Die Raumsonde wird möglicherweise in der Lage sein, die im September 2020 bekanntgegebenen Messungen von Monophosphin in der Venus-Atmosphäre weiter zu bestätigen.[47][48] Am 10. August 2021 fand ein zweiter Venus-Flyby statt und es konnten Daten gesammelt werden.

Erstes Swing-by an Merkur
Das erste Swing-by an Merkur fand am 1. Oktober 2021 statt. Das Ereignis wurde von den Selfie-Kameras festgehalten, im Hintergrund ist Merkur erkennbar. Solange das Raumfahrzeug als Mercury Composite Spacecraft unterwegs ist, können die abbildenden wissenschaftlichen Instrumente noch keine Aufnahmen machen.[49] Einige der Instrumente konnten Daten über die Teilchen und über das Magnetfeld in der Nähe des Planeten sammeln, darunter in Bereichen, die aus den späteren Merkurumlaufbahnen nicht mehr zugänglich sind.[50] Mit jedem weiteren Swing-by wird die Sonde weiter abgebremst, bis sie in die Umlaufbahn eintreten kann.
Ankunft bei Merkur
Kurz vor dem endgültigen Erreichen der Merkurumlaufbahn im Dezember 2025 wird das MTM abgetrennt, und die beiden aufeinandersitzenden Sonden treten mit dem chemischen Antrieb des MPO in die polare Zielumlaufbahn des MIO ein. Dort wird MIO über eine Spinseparation aus dem MOSIF vom MPO abgetrennt.[23] Dann wird auch der MPO vom MOSIF abgetrennt und vom chemischen Antrieb in seine eigene polare Umlaufbahn gebracht.[51] Beide Orbiter sollen dabei in einer koplanaren Anordnung operieren.
Am Ziel angekommen, werden die Sonden Temperaturen von deutlich über 300 °C ausgesetzt sein. Dabei wird ihnen nicht nur die starke direkte Sonneneinstrahlung zusetzen, sondern auch die von der Tagseite Merkurs ausgehende Albedostrahlung und die von der bis zu 470 °C heißen Merkuroberfläche abgestrahlte Infrarotstrahlung.[52]
Die formelle Hauptmissionsdauer der beiden Orbiter nach dem Erreichen der Merkurumlaufbahnen ist auf ein Jahr veranschlagt, mit der Möglichkeit einer anschließenden einjährigen Sekundärmission.[2]
Siehe auch
Literatur
- Harald Krüger, Norbert Krupp, Markus Fränz: Aufbruch zum Merkur. In: Sterne und Weltraum. 57, Nr. 10, 2018, ISSN 0039-1263, S. 26–37.
- Tilmann Althaus: Die Merkursonde BepiColombo. In: Sterne und Weltraum. 46, Nr. 7, 2007, ISSN 0039-1263, S. 26–36.
Weblinks
- Karl Urban: Der Merkur-Orbiter BepiColombo. In: Raumfahrer.net. 13. Mai 2007, abgerufen am 22. Oktober 2018.
- Die BepiColombo Mission zum Merkur. In: DLR.de. Abgerufen am 22. Oktober 2018.
- BepiColombo. In: sci.ESA.int. Abgerufen am 22. Oktober 2018 (englisch).
- BepiColombo. Mercury Exploration. In: stp.isas.JAXA.jp. Abgerufen am 22. Oktober 2018 (englisch).
- BepiColombo im NSSDCA Master Catalog (englisch)
- RZ043 BepiColombo. In: Raumzeit-Podcast.de. 3. August 2012, abgerufen am 22. Oktober 2018.
- Rüdiger Jehn: Videos „How to fly to Mercury“. Abgerufen am 14. Mai 2019.
Einzelnachweise
- BepiColombo To Enter Implementation Phase. ESA, 26. Februar 2017.
- BEPICOLOMBO – Fact Sheet. In: ESA.int. 10. Dezember 2019, abgerufen am 10. Dezember 2019 (englisch).
- BepiColombo blasts off to investigate Mercury’s mysteries. In: ESA.int. Abgerufen am 20. Oktober 2018 (englisch).
- Solar Electric Propulsion. Abgerufen am 9. Oktober 2021.
- Electric blue thrusters propelling BepiColombo to Mercury. In: ESA.int. Abgerufen am 26. Mai 2020 (englisch).
- Fabian Lüdicke: BepiColombo Mission: Raumsonde, Missionsprofil, Instrumente. In: DLR.de. Institut für Planetenforschung, abgerufen am 17. September 2017.
- Fabian Lüdicke: Laseraltimeter BELA. In: DLR.de. Institut für Planetenforschung, abgerufen am 17. September 2017.
- DLR – Institut für Planetenforschung – Laseraltimeter BELA. In: DLR.de. Abgerufen am 13. Juni 2020.
- MERTIS. In: Cosmos.ESA.int. Abgerufen am 18. Oktober 2018 (britisches Englisch).
- PHEBUS. In: Cosmos.ESA.int. Abgerufen am 18. Oktober 2018 (britisches Englisch).
- J.-F. Mariscal, N. Rouanet, J.-L. Maria, B. Lustrement, E. Bertran, C. Montaron, G. Guignan, A. Reberac, E. Quemerais, P. Zuppella, M. G. Pelizzo, A. J. Corso, I. Yoshikawa, K. Yoshioka, G. Murakami: PHEBUS UV spectrometer on board ESA-BepiColombo Mission: Instrument design & performance results. In: SPIE digital library (Hrsg.): International Conference on Space Optics – ICSO 2018. 12. Juli 2019, doi:10.1117/12.2536020.
- SIMBIO-SYS. In: Cosmos.ESA.int. Abgerufen am 19. Oktober 2018 (britisches Englisch).
- SIXS. In: Cosmos.ESA.int. Abgerufen am 19. Oktober 2018 (britisches Englisch).
- MPS: MIXS on BepiColombo. Abgerufen am 20. Juni 2020.
- MIXS. In: Cosmos.ESA.int. Abgerufen am 1. November 2018 (britisches Englisch).
- What is STROFIO? (Memento vom 12. Dezember 2016 im Internet Archive). In: ifsi-roma.inaf.it.
- MPS: BepiColombo – SERENA. Abgerufen am 20. Juni 2020.
- SERENA. In: Cosmos.ESA.int. Abgerufen am 2. November 2018 (britisches Englisch).
- MPO/MAG – Cosmos. In: Cosmos.ESA.int. Abgerufen am 23. November 2018 (britisches Englisch).
- ESA Science & Technology – Earth flyby opens new science opportunities for BepiColombo. In: sci.ESA.int. Abgerufen am 13. Juni 2020.
- Christoph Steiger, Alkan Altay, Elsa Montagnon, Frank Budnik, Massimo Casasco, Pascal Espeillac, Susanne Fugger, Tommy Strandberg: GNC Operations for the BepiColombo Mission to Mercury: First In-flight Experience. Hrsg.: European Conference for aeronautics and space sciences 2019. 2019, doi:10.13009/EUCASS2019-218 (researchgate.net).
- MIO – Mercury Magnetospheric Orbiter’s New Name. In: global.jaxa.jp. 8. Juni 2018, abgerufen am 10. Dezember 2019 (englisch).
- MMO (Mercury Magnetospheric Orbiter): Objectives. In: stp.isas.jaxa.jp. Space Plasma Group – ISAS/JAXA, abgerufen am 10. Dezember 2019 (englisch).
- MIO – Mercury Magnetospheric Orbiter. In: global.jaxa.jp. JAXA, abgerufen am 10. Dezember 2019.
- Mercury Magnetospheric Orbiter MIO / BepiColombo. In: isas.jaxa.jp. JAXA Institute of Space and Astronautical Studies, abgerufen am 10. Dezember 2019 (englisch).
- Mercury Magnetospheric Orbiter. In: Cosmos.ESA.int – Bepi Colombo. ESA, abgerufen am 10. Dezember 2019 (englisch).
- MMO/MGF MMO magnetometer. In: Cosmos.ESA.int – Bepi Colombo. ESA, abgerufen am 10. Dezember 2019 (englisch).
- BepiColombo nähert sich dem Planeten Merkur Weltrauminstitut, oeaw.ac.at, 29. September 2021, abgerufen am 3. Oktober 2021.
- MPPE Mercury plasma/particle experiment. In: Cosmos.ESA.int – Bepi Colombo. ESA, abgerufen am 10. Dezember 2019 (englisch).
- MPPE. Abgerufen am 20. Juni 2020.
- PWI plasma wave investigation. In: Cosmos.ESA.int – Bepi Colombo. ESA, abgerufen am 10. Dezember 2019 (englisch).
- MSASI Mercury Sodium atmosphere spectral imager. In: Cosmos.ESA.int – Bepi Colombo. ESA, abgerufen am 10. Dezember 2019 (englisch).
- BepiColombo industrial contract signed. In: ESA.int. 18. Januar 2008, abgerufen am 14. August 2012 (englisch).
- ESA’s Mercury mapper feels the heat. In: ESA.int. 18. Januar 2011, abgerufen am 19. Januar 2011 (englisch).
- Mercury Planetary Orbiter takes a simulated trip to the innermost planet. In: sci.ESA.int. 12. Oktober 2011, abgerufen am 14. Oktober 2011 (englisch).
- BepiColombo science orbiters stacked together. In: ESA.int. ESA, abgerufen am 10. Dezember 2019 (englisch).
- Launch Kit VA-245. In: Arianespace.com. (PDF; 1,6 MB). Abgerufen am 13. Juni 2020.
- Arianespace VA245 Launch Press Kit. (PDF; 1,7 MB) In: Arianespace.com. Abgerufen am 13. Oktober 2018.
- BepiColombo now firing on all cylinders. In: ESA.int. Abgerufen am 26. Mai 2020 (englisch).
- MPPE – BepiColombo – Cosmos. In: Cosmos.ESA.int. Abgerufen am 17. Juli 2019.
- First electron spectra in the solar wind for MEA onboard BepiColombo. In: irap.omp.eu. Abgerufen am 17. Juli 2019. First electron spectra in the solar wind for MEA onboard BepiColombo (Memento des Originals vom 17. Juli 2019 im Internet Archive) Info: Der Archivlink wurde automatisch eingesetzt und noch nicht geprüft. Bitte prüfe Original- und Archivlink gemäß Anleitung und entferne dann diesen Hinweis.
- Guido Meyer: ESA. Raumfahrt: Zurück zur Routine. In: ORF.at. 8. April 2020, abgerufen am 8. April 2020.
- ESA Science & Technology – ESA to conduct BepiColombo flyby amid coronavirus crisis. In: sci.ESA.int. Abgerufen am 13. Juni 2020.
- ESA Science & Technology – Earth flyby opens new science opportunities for BepiColombo. In: sci.ESA.int. Abgerufen am 13. Juni 2020.
- BepiColombo takes last snaps of Earth en route to Mercury. In: ESA.int. 10. April 2020, abgerufen am 13. April 2020 (englisch).
- BepiColombo flies by Venus en route to Mercury. In: ESA.int. 15. Oktober 2020, abgerufen am 22. Oktober 2020: „‚The flyby itself was very successful,‘ confirms Elsa. ‚The only difference to normal cruise phase operations is that near to Venus we have to temporarily close the shutter of any of the star trackers that are expected to be blinded by the planet, similar to closing your eyes to avoid looking at the Sun.‘“
- Jonathan O’Callaghan: In A Complete Fluke, A European Spacecraft Is About To Fly Past Venus – And Could Look For Signs Of Life (en). In: Forbes.com. Abgerufen am 16. September 2020.
- Leah Crane: BepiColombo may be able to search for signs of life as it passes Venus. In: NewScientist.com. Abgerufen am 26. September 2020.
- BepiColombo’s first views of Mercury. Abgerufen am 9. Oktober 2021 (englisch).
- BepiColombo’s first tastes of Mercury science. Abgerufen am 17. Oktober 2021 (englisch).
- Mission Operations – Getting to Mercury. In: sci.ESA.int. 12. Oktober 2018, abgerufen am 22. Oktober 2018 (englisch).
- ESA gives go-ahead to build BepiColombo. In: ESA.int. 26. Februar 2007, abgerufen am 22. Oktober 2018 (englisch).

Mariner 10 (1973) | MESSENGER (2004) | BepiColombo (2018)
(Siehe auch: Merkur | Chronologie der Merkurmissionen)

COS-B (1975) · GEOS 1 und 2 (1977, 1978) · ISEE 2 (1977) · Meteosat (1977–1997) · IUE (1978) · Marecs A und B (1981, 1984) · Exosat (1983) · ECS (1983–1988) · Giotto (1985) · Olympus (1989) · Hipparcos (1989) · Hubble (1990) · Ulysses (1990–2009) · ERS 1 und 2 (1991, 1995) · EURECA (1992) · ISO (1995) · SOHO (1995) · Huygens (1997) · XMM-Newton (1999) · Cluster (2000) · Artemis (2001) · Proba-1 (2001) · Envisat (2002) · MSG-1, -2, -3, -4 (2002, 2005, 2012, 2015) · Integral (2002) · Mars Express (2003) · Smart-1 (2003) · Double Star (2003) · Rosetta (2004) · CryoSat (2005) · SSETI Express (2005) · Venus Express (2005) · Galileo (2005–2020) · MetOp-A, -B und -C (2006, 2012, 2018) · Corot (2006) · GOCE (2009) · Herschel (2009) · Planck (2009) · Proba-2 (2009) · SMOS (2009) · CryoSat-2 (2010) · HYLAS (2010) · Swarm (2013) · Gaia (2013) · Proba V (2013) · Sentinel 1A/1B (2014, 2016) · Sentinel 2A/2B (2015, 2017) · LISA Pathfinder (2015) · Sentinel 3A/3B (2016, 2018) · ExoMars Trace Gas Orbiter (2016) · Schiaparelli (2016) · Sentinel-5P (2017) · ADM-Aeolus (2018) · BepiColombo (2018) · Cheops (2019) · Solar Orbiter (2020) · JWST (2021)
Geplante Starts: ExoMars Rover (2022) · Biomass (2023) · EarthCARE (2023) · Euclid (2023) · Juice (2023) · MTG-I1 bis -I4, -S1, -S2 (ab 2023) · Hera (2024) · MetOp-SG (2024–2039) · Smile (2024) · Altius (2025) · Flex (2025) · Forum (2026) · Plato (2026) · Ariel (2029) · Comet Interceptor (2029) · EnVision (2031–2033)