Analogrechner
Analogrechner sind Rechengeräte oder Rechenmaschinen, mit denen Berechnungen mit Hilfe von kontinuierlichen mechanischen oder elektrischen Vorgängen durchgeführt werden. Sie unterscheiden sich von Digitalrechnern dadurch, dass keine Stücke oder Ereignisse gezählt werden und sowohl die Rechenwerte als auch der Zeitverlauf kontinuierlich abgebildet werden. Beim Rechenschieber, einem einfachen mechanischen Analogrechner, werden Zahlen als stetig auswählbare Längen repräsentiert und die Multiplikation bzw. Division von Zahlen auf eine logarithmische Addition bzw. Subtraktion abgebildet.

Bei Analogrechnern wird die Eigenschaft ausgenutzt, dass es in einem bestimmten Gültigkeitsbereich einen Zusammenhang zwischen dem Verhalten von Original und Modell gibt („Analogieprinzip“). Man kann mit dem Modell das Verhalten des Originals simulieren, weil sich Original und Modell in dem Bereich, der von Interesse ist, ähnlich (lat. „simul“) verhalten. Analogrechner wurden anfangs für spezifische technische Zusammenhänge verwendet, beispielsweise zur Berechnung von Regelvorgängen mit Hilfe von pneumatischen oder elektrischen Ersatzschaltungen, die das dynamische Verhalten nachahmten. Ein anderes Beispiel war die mechanisch arbeitende Gezeitenrechenmaschine. Ab den 1940er Jahren wurden Analogrechner auf Basis von Elektronenröhren und später Transistoren und Operationsverstärkern gebaut und für allgemeine Problemlösungen standardisiert.
Analogrechner wurden ab Mitte der 1980er Jahre zunehmend durch Digitalrechner verdrängt. In einer Übergangszeit gab es Hybridrechner mit einer Kombination von Analog- und Digitalrechner. Beim Analogrechner besteht die Gefahr, dass die Ergebnisse wegen eines Fehlers in der Verkabelung – zum Beispiel durch einen herausgerutschten Stecker – oder einer fehlerhaften Komponente inkorrekt sind, wobei insbesondere der „Programmwechsel“ mit Risiken verbunden ist. Nur bei Hardware-in-the-Loop-Simulationen, wo Echtzeit gefordert war, hielt er sich noch eine Weile. Letztlich waren es die Gesamtkosten und die Flexibilität, die dem Digitalrechner Vorteile verschafften.

Vergleich zu Digitalrechnern
Analogrechner repräsentieren ihre Daten nicht als diskrete Werte wie die Digitalrechner, sondern als kontinuierliche – eben analoge – Größen, zum Beispiel in Form von geometrischen Längen, Winkeln, Wasserständen (Wasserintegrator), elektrischen Spannungen oder Strömen. Die Beschreibung der Gleichungen erfolgt bei einem elektronischen Analogrechner durch die Verkabelung von standardisierten Bauelementen, bei einem Digitalrechner durch das Programm.
Der große Vorteil von Analogrechnern gegenüber Digitalrechnern ist ihre Echtzeitfähigkeit sowie ihre prinzipbedingt hohe Ausführungsparallelität bis in den Frequenzbereich von 20 kHz.[1] Dies führt zu einer gegenüber algorithmisch programmierten Maschinen deutlich größeren Rechenleistung mit jedoch geringerer Rechengenauigkeit, die im besten Fall bei ca. 0,01 Prozent liegt.
Geschichte der Analogrechner

Bekannte alte Beispiele für Analogrechner sind die verschiedenen Arten von Rechenschiebern und mechanischen Planimetern, die seit dem 19. Jahrhundert weit verbreitet waren, bis sie in den 1970er und 1980er Jahren durch digitale elektronische Geräte abgelöst wurden. Weit verbreitet waren auch Proportionalwinkel, Reduktionszirkel und (fürs Zeichnen) Pantografen und Koordinatografen. Rechenschieber gab es vor allem in den Formen Rechenstab, Rechenscheibe, Rechenwalze und Rechenuhr.
Das älteste bekannte Gerät mit einer analogen Arbeitsweise ist der Mechanismus von Antikythera, der auf ungefähr 150 v. Chr. datiert wird. Mit ihm konnten Mond- und Sonnenfinsternisse sowie die Olympiaden ermittelt werden. Der Mechanismus von Antikythera stellte lediglich feste, vorfaktorisierte Beziehungen zwischen mehreren zeitlich periodisch veränderlichen Größen dar, es wurde somit nicht im eigentlichen Sinn gerechnet.
Zur Berechnung von Gezeiten wurden mechanische Analogrechner eingesetzt, wie man sie im Deutschen Schifffahrtsmuseum in Bremerhaven oder in Wilhelmshaven[2] sehen kann. Mechanische Getriebe dienten als Integratoren, die über Seilrollengetriebe miteinander gekoppelt wurden, um den Einfluss des Mondes, der Sonne und der Erdrotation sowie einiger weitere Parameter nachzubilden.
1919 war Vannevar Bush als Wissenschaftler am MIT beschäftigt, ab 1923 als Professor für Elektrotechnik. Dort entwickelte er zwischen 1923 und 1927 einen Analogrechner zum Lösen von Differentialgleichungen, den Product Integraph. Der Differential Analyzer war ein elektromechanischer Analogrechner, der gleichzeitig mehrere Differentialgleichungen integrieren konnte. Die Ausgabe erfolgte mittels automatisch gedruckter Schaubilder. Er wurde in den Jahren 1928 bis 1932 am Massachusetts Institute of Technology (MIT) unter der Leitung von Vannevar Bush und H. L. Hazen entwickelt.
Der Wasserintegrator wurde 1936 in der Sowjetunion gebaut. Mittels eines komplexen Netzwerkes aus Röhren und Wasserbehältern konnten analoge dynamische Berechnungen durchgeführt werden.
Im Zweiten Weltkrieg arbeitete Sergei Alexejewitsch Lebedew an automatischen Steuerungen für komplexe Systeme. Seine Gruppe entwickelte eine Zieleinrichtung für Panzer und ein Navigationssystem für Raketen. Hierfür entwickelte er bis 1945 einen Analogrechner zum Lösen von Differentialgleichungen. Gleichzeitig entwickelte Hendrik Wade Bode in den USA eine rückgekoppelte automatische Steuerung für Flugabwehrkanonen (Director T-10) auf Basis von Radardaten.
Helmut Hölzer (1912–1996) war ein deutscher Ingenieur (TH Darmstadt, heute TU Darmstadt), der an der Heeresversuchsanstalt Peenemünde einen elektrischen Analogrechner zur Stabilisierung und Lenkung der ballistischen A4-Rakete entwickelte. Hierbei wurden in einem Mischgerät die mit Kreiseln gemessenen Beschleunigungen und Richtungen zu Entfernungen und Winkeln integriert.[3] Damit wurden die Strahlruder und der Brennschluss entsprechend dem vorgegebenen Sollverlauf der Flugbahn gesteuert.
Johannes Hoch (1913–1950) war ein Maschinenbauingenieur (Universität Göttingen), der das Mischgerät nach der Aktion Ossawakim in der Sowjetunion weiterentwickelte und darüber hinaus einen Rechner für das Bahnmodell erstellte, mit dem die Trajektorie einer Rakete unter Berücksichtigung der variablen Koeffizienten berechnet werden konnte. Zusammen mit dem Mischgerät ermöglichte es die Simulation des Steuerungssystems inkl. der Rudermaschinen vor dem Start.[4]
Elektronische Analogrechner
Elektronische Analogrechner wurden in den Jahren zwischen 1950 und 1980 zur standardisierten Lösung von linearen und nichtlinearen Differentialgleichungen entwickelt und standardisiert. Elektronische Analogrechner waren technisch nutzbar zum Beispiel zur Simulation von Flugbahnen von Artilleriegeschossen und Bomben, zur Untersuchung von Fragestellungen in der Reaktorphysik, in der Luft- und Raumfahrttechnik, jedoch auch in der Mathematik, der Simulation von Prozessen, bei der Optimierung etc.
Hauptelement eines herkömmlichen elektronischen Analogrechners ist der Operationsverstärker, der als Grundlage für folgende aktive Grundelemente dient:
- Summierer (mit mehreren Eingängen)
- Integrierer (mit der Möglichkeit zum vorübergehenden Anhalten der Integration)
- Multiplizierer und Dividierer
Neben diesen Grundelementen verfügen elektronische Analogrechner als Eingabeeinheit über Koeffizientenpotentiometer, die als Spannungsteiler eingesetzt werden, um variable Koeffizienten abzubilden. Mit Funktionsgeneratoren auf der Basis von Diodennetzwerken können nichtlineare Kennlinien eingestellt werden. Darüber hinaus wurden im Lauf der Jahre eine Vielzahl spezialisierter Zusatzgeräte entwickelt. Zu diesen zählen Resolver zur Umwandlung zwischen kartesischen Koordinaten und Polarkoordinaten, Laufzeitverzögerungsglieder zur Simulation von Signallaufzeiten, Rauschgeneratoren für die Erzeugung stochastischer Signale, und viele mehr.
Zur Darstellung der Ergebnisse einer Rechnung werden meist Oszilloskope beziehungsweise Linienschreiber verwendet. Hierbei kommt die Möglichkeit eines Analogrechners, Rechnungen durch Zeitskalierung zwanglos schneller beziehungsweise langsamer als in der Realität ablaufen zu lassen, zum Tragen. Beispielsweise ist es möglich, die Simulation eines einfachen Ökosystems mit extrem gesteigerter Geschwindigkeit ablaufen zu lassen, während andere Vorgänge, die in der Realität zu schnell für eine direkte Untersuchung ablaufen (reaktionskinetische Fragen in der Chemie etc.), entsprechend verlangsamt untersucht werden können. Durch (manuelles) Verstellen von Koeffizientenparametern kann auf einfache Weise das Ergebnis interaktiv variiert oder optimiert werden.
Neben der eingeschränkten Rechengenauigkeit besteht bei elektronischen Analogrechnern das zusätzliche Problem eines auf eine sogenannte Maschineneinheit eingeschränkten Wertebereiches. Bei Verwendung von Elektronenröhren betrug die Maschineneinheit meist 100 V, während, von wenigen Ausnahmen abgesehen, transistorisierte Analogrechner meist mit 10 V als Maschineneinheit arbeiteten. Überschreitungen dieses Wertebereiches im Verlauf einer Rechnung führten zu einer Übersteuerung und lösten einen Alarm des Rechners aus. Die Differentialgleichungen müssen durch eine geeignete Skalierung dergestalt modifiziert werden, dass es bei ihrer Lösung zum einen zu keiner Übersteuerung, zum anderen jedoch zu einer stets möglichst guten Ausnutzung des Wertebereiches von +/−1 Maschineneinheit kommt, um Rechenfehler gering zu halten. In dieser Hinsicht kann ein elektronischer Analogrechner mit gewissem Recht mit einem digitalen Festkommasystem verglichen werden, das über ähnliche Einschränkungen hinsichtlich des Wertebereiches verfügt. Mit vertretbarem Aufwand war in den 1970er Jahren mit transistorbasierten Analogrechnern eine Genauigkeit von 4 Dezimalstellen erreichbar. In den meisten Fällen war dies mehr als ausreichend, da die Parameter des simulierten Modells nur wesentlich ungenauer bestimmt werden konnten.
Die meisten kommerziell verfügbaren Analogrechner besaßen ein zentrales Buchsenfeld (Patchfeld), auf dem mit Hilfe von Steckverbindungen (bei Präzisionsrechnern wurden abgeschirmte Leitungen verwendet) die jeweiligen Rechenschaltungen zur Lösung einer Fragestellung aufgebaut wurden. Ein Wechsel von einer Schaltung zur nächsten erforderte das Austauschen eines Schaltbretts (mit dem Buchsenfeld) sowie eine entsprechende Einstellung der Koeffizientenpotentiometer, so dass ein vergleichsweise schneller Wechsel zwischen Problemen möglich war.
- Beispiele von Analogrechnersystemen
 Analogrechner-Programmierung per Steckfeld und Potentiometer (Boeing, 1953)
Analogrechner-Programmierung per Steckfeld und Potentiometer (Boeing, 1953) Elektronischer Analogrechner AKAT-1 von Jacek Karpiński in Polen (1959)
Elektronischer Analogrechner AKAT-1 von Jacek Karpiński in Polen (1959) Elektronischer Newmark-Analogrechner (1960)
Elektronischer Newmark-Analogrechner (1960) Analogrechner PACE 231R für Simulation des Experimentalflugzeugs X-15
Analogrechner PACE 231R für Simulation des Experimentalflugzeugs X-15 Schaltbrett des Hybridrechners EAI-8800 zur Simulation eines Rad-Schiene-Systems (1985)
Schaltbrett des Hybridrechners EAI-8800 zur Simulation eines Rad-Schiene-Systems (1985) Schaltbrett des Hybridrechners EAI-8800 (Rückansicht der Kontaktebene)
Schaltbrett des Hybridrechners EAI-8800 (Rückansicht der Kontaktebene)
Beispiel: Zellulärer Automat
In der Frühzeit der Entwicklung elektronischer Analogrechner gab es Ansätze, Probleme durch das Bilden direkter Analogien mit Hilfe hauptsächlich passiver Elemente wie Widerständen, Kondensatoren und Spulen anzugehen.
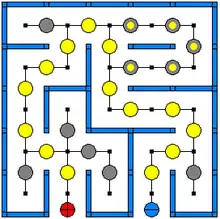
Die Wege durch einen Irrgarten können mit einem Netzwerk von Widerständen entsprechend der jeweiligen Teillänge eines Abschnitts modelliert werden. Wenn man eine Spannung zwischen dem Eingang und dem Ausgang anlegt, findet man den kürzesten Weg, indem man an jeder Gabelung die Richtung mit dem größten Stromfluss nimmt. Das Grundprinzip der Lösung beruht auf der Stromaufteilung durch ein Widerstandsnetzwerk mit parallelen und seriellen Elementen. Auf ähnliche Weise würde sich ein Wasserstrom den schnellsten Weg durch den Irrgarten suchen, sofern zwischen Eingang und Ausgang ein stetiges Gefälle vorliegt.
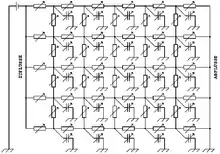
Funktionell weitergehend ist der Aufbau eines analogen zellulären Automaten zur Simulation von Grundwasserströmungen mit unterirdischen Speichern. Man stellte ein zweidimensionales Feld aus Kondensatoren zusammen, deren Kapazität dem Wasserspeichervermögen eines kleinen Teilgebietes des Bodens entsprach, und verband diese dann mit Widerständen mit ihren direkten Nachbarn, wobei die Leitfähigkeit der Widerstände der Wasserdurchlässigkeit des entsprechenden Teilgebietes des Bodens entsprach. Dazu kamen nun Quellgebiete als über Widerstände geregelte Spannungseinleitungen, und Brunnen als über Widerstände geregelte Spannungsableitungen. Die an den Knotenpunkten dieses Netzes gemessene Spannung des Kondensators (also das Integral der Summe aller Ladeströme) entsprach dann dem zu erwartenden Grundwasserstand, und die Ströme in den Widerständen entsprachen der zu erwartenden Grundwasserströmung.
Beispiel: Schwingungsgleichung eines Federpendels
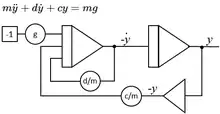
Das Haupteinsatzgebiet von Analogrechnern ist das Lösen von Differentialgleichungen. Eine Schwingungsgleichung ist eine Differentialgleichung zweiter Ordnung, wie sie beispielsweise für ein Federpendel durch beschrieben wird. Hierbei ist die vertikale Auslenkung einer Masse , die Dämpfungskonstante, die Federkonstante und die Erdbeschleunigung. Für den Analogrechner wird die Gleichung nach aufgelöst und erhält damit die Form . Die zugehörige Rechenschaltung benötigt zwei Integrierer mit den Zustandsgrößen für die Geschwindigkeit bzw. für die Position der Masse, einen Summierer für die Invertierung von auf und drei Potentiometer für die Koeffizienten. Diese Komponenten werden durch insgesamt acht Steckkabel verbunden. Hierbei ist zu berücksichtigen, dass Integrierer und Summierer eines Analogrechners die Eingangssignale ebenso wie Operationsverstärker invertieren.










Die notwendigen Skalierungen auf Maschineneinheiten ergeben sich intuitiv durch die Größenordnungen der physikalischen Zustandsgrößen (in den physikalischen Einheiten bzw. ) bzw. durch die Quotienten der Koeffizienten in Verbindung mit wählbaren Eingangsverstärkungen der Integrierer (typisch 1, 10, 100). Die Lösung ergibt eine linear gedämpfte Schwingung mit einer stabilen Endlage bei aufgrund der irdischen Schwerkraft und der Federkonstante.


Beispiel: Sinuslauf eines Rad-Schiene-Systems
Das dynamische Verhalten eines Drehgestells in einem Rad-Schiene-System erfordert ein komplexes nichtlineares Simulationsmodell. Bei höheren Geschwindigkeiten neigt das System zum Schwingen, dem sog. Sinuslauf, und sogar, bei ungenügender Auslegung, zu Instabilität. Der Kontakt zwischen dem Rad und der Schiene ist aufgrund der Profilierung des Spurkranzes, der das Entgleisen verhindert, nichtlinear und die Freiheitsgrade sind miteinander verkoppelt. Ein Eisenbahnwaggon mit zwei Drehgestellen hat ca. 50 bis 70 Zustandsgrößen und ist daher selbst mit dem größten Hybridrechner EAI-8800[5] nicht mehr darstellbar. Dessen Simulation erfordert daher das Zusammenschalten von mehreren Hybridrechnern und das Multiplexen der Kräfte an einem Rad, um damit die Zustandsgrößen der Radsätze eines Drehgestells zu ermitteln.[6] Mit dem zugeordneten Digitalrechner wurden Optimierungsrechnungen durch Variationen der Parameter der Hybridsimulation durchgeführt, um ein möglichst verschleißarmes und stabiles Laufverhalten zu erzielen.[7]
Hybridrechner
Gegen Ende der 1960er Jahre wurden auch vermehrt so genannte Hybridrechner entwickelt und eingesetzt, die über digitale und analoge Rechenwerke verfügten, um so die Vorteile beider Techniken, der analogen sowie der digitalen zu vereinigen. Diese Kopplung ermöglichte erweiterte Simulationsmöglichkeiten mit komplexen Kennfeldern oder Optimierungsverfahren mit Variation von Parametern. Die Umwandlung zwischen den Darstellungsarten mit kontinuierlichen (meist elektrische Spannungen) beziehungsweise numerischen Werten erfolgte mit Analog-Digital- beziehungsweise Digital-Analog-Wandlern.
Sonstiges
Modulare Synthesizer entsprechen in ihrem Aufbau elektronischen Analogrechnern. Berühmte Hersteller von mathematischen Instrumenten waren Amsler (Schaffhausen), Coradi (Zürich) und Ott (Kempten). Integrieranlagen stammten z. B. von Telefunken, Amsler und Contraves.
Literatur
- Wolfgang Giloi, Rudolf Lauber: Analogrechnen. Springer, 1963.
- Sigvard Strandh: Die Maschine – Geschichte, Elemente, Funktion. Herder, 1980, ISBN 3-451-18873-2, S. 191.
- Achim Sydow: Programmierungstechnik für elektronische Analogrechner. VEB Verlag Technik, 1964.
- H. Adler, G. Neidhold: Elektronische Analog- und Hybridrechner. Nr. 206-435/197/74. VEB Deutscher Verlag der Wissenschaften, Berlin (Ost) 1974.
- Herbert Bruderer: Meilensteine der Rechentechnik. Band 1: Mechanische Rechenmaschinen, Rechenschieber, historische Automaten und wissenschaftliche Instrumente, 2., stark erw. Auflage, Walter de Gruyter, Berlin/Boston 2018, ISBN 978-3-11-051827-6
- Bernd Ulmann: Analogrechner, Wunderwerke der Technik – Grundlagen, Geschichte und Anwendung. 2010, ISBN 978-3-486-59203-0.
- James S. Small: The analogue alternative. The electronic analogue computer in Britain and the USA, 1930–1975, Routledge 2001
Weblinks
- Das Analogrechnermuseum Sammlung elektronischer Analogrechner mit umfangreicher Dokumentation zum Download sowie vielen praktischen Beispielen.
- Darstellung eines Joukowski-Profils mit Strömungslinien auf einem Analogrechner
- Historische Analog- und Hybridrechner mit Detailbildern ihrer Steckbretter
- Neueres Forschungsprojekt FACETS (Fast Analog Computing with Emergent Transient States)
- Vortrag von Bernd Ulmann auf dem Vintage Computing Festival Berlin (VCFB) 2015 über Analogrechnerprogrammierung und dem Easterhegg 2017 über Analogrechnen
Einzelnachweise
- Alfred Schmidt: Was die Echtzeitsimulation heute leistet (Teil 1). Hrsg.: Elektronik. Nr. 17/1992. Franzis-Verlag, München 18. August 1992, S. 52–57.
- Erster deutscher Gezeitenrechner von 1914 in Wilhelmshaven
- Helmut Hoelzer’s Fully Electronic Analog Computer used in the German V2 (A4) rockets. (PDF-Datei; 497 kB)
- Boris Jewsejewitsch Tschertok: Raketen und Menschen. Deutsche Raketen in Sowjethand. Elbe-Dnjepr-Verlag, Klitzschen 1998, ISBN 3-933395-00-3, S. 251 f. (500 S.).
- System Description EAI-8800 Scientific Computing System. (PDF; 2,62 MB) Electronic Associates, Inc. (EAI), 1. Mai 1965, abgerufen am 5. September 2019 (englisch).
- Alfred Schmidt; Lutz Mauer: Hybrid Simulation of the Nonlinear Dynamics of High-speed Railway Vehicles , Springer-Verlag, 1988
- Peter Meinke, A. Mielcarek: Design and Evaluation of Trucks for High-Speed Wheel/Rail Application. Hrsg.: International Centre for Mechanical Sciences. Band 274. Springer, Wien 1982, S. 281–331 (englisch).