Resolver
Als Resolver (engl. für Koordinatenwandler) wird ein elektromagnetischer Messumformer zur Wandlung der Winkellage eines Rotors in eine elektrische Größe bezeichnet. Andere Winkellagegeber oder Winkelgeber sind zum Beispiel Potentiometergeber, Inkrementalgeber und Absolutwertgeber.

Prinzip
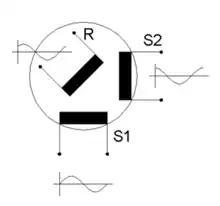
In einem zylindrischen Gehäuse sind zwei um 90° versetzte Statorwicklungen angeordnet, die einen im Gehäuse gelagerten Rotor mit der Rotorwicklung umschließen. Die Rotorwicklung wird über Schleifringe und Bürsten nach außen geführt. Heutige Resolver sind üblicherweise bürstenlos, die Information des Rotors wird induktiv übertragen. Im Gegensatz zu einem Inkrementalgeber liefert der Resolver innerhalb einer Umdrehung (Polteilung) ein absolutes Winkelsignal und muss daher nach dem Einschalten nicht referenziert werden.
Statorerregung
Die Statorwicklung S1 wird mit einer sinusförmigen Wechselspannung erregt; die Statorwicklung S2 wird mit einer gegenüber S1 um 90° verschobenen Wechselspannung erregt. Die Phasenlage der in der Rotorwicklung induzierten Spannung hängt von der Stellung des Rotors ab:
- steht der Rotor genau gegenüber der Statorwicklung S1, ist die Phasenlage der Rotorspannung 0°,
- steht der Rotor gegenüber der Statorwicklung S2, ist die Phasenlage der Rotorspannung 90°,
- steht der Rotor mittig zwischen S1 und S2 ist die Phasenlage der Rotorspannung 45°.
Während einer Umdrehung des Rotors liefert der Winkellagegeber eine Wechselspannung, deren Phasenlage sich von 0° bis 360° dreht. Die Phasenlage der Ausgangsspannung des Rotors in Bezug auf die Erregerspannung an S1 ist also ein Maß für die Winkellage des Rotors.
Rotorerregung
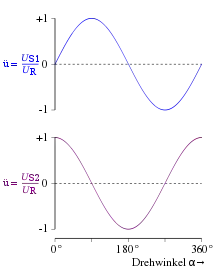
Alternativ wird die Rotorwicklung R mit einer sinusförmigen Wechselspannung erregt. Die Amplituden der in S1 und S2 induzierten Spannungen sind abhängig vom Winkel des Rotors und entsprechen dem Sinus und Kosinus der Winkellage des Rotors. Die Winkellage errechnet sich aus den Amplituden und durch




Bauformen
Neben dem beschriebenen 2-poligen Winkellagegeber gibt es auch mehrpolige Bauformen. Ein 4-poliger Winkellagegeber liefert bei einer Rotorumdrehung eine Phasenverschiebung von 2 × 360°. Differenzialwinkellagegeber haben zwei um 90° versetzte Rotorwicklungen, liefern also zwei um 90° verschobene Ausgangsspannungen.
Bei bürstenlosen Winkellagegebern wird die Rotorspannung durch einen rotierenden Übertrager transformatorisch nach außen übertragen.
Ein induktiver Drehgeber mit drei um 120° versetzten Statorspulen wird Synchro genannt.
Anwendung
Das Ausgangssignal des Winkellagegebers kann direkt zur Anzeige mit einem geeigneten Gerät benutzt oder verstärkt oder digitalisiert einem Mess- oder Regelgerät zugeführt werden. Überall wo die Winkellage eines mechanischen Elements interessiert, wurden Winkellagegeber eingesetzt, beispielsweise Ruderlage bei Schiffen, Stellung von Steuerelementen in Anlagen der Chemie und in Elektrizitätswerken oder auch als Lagegeber in gesteuerten Werkzeugmaschinen und Industrierobotern. Auch ältere Radargeräte und drehbare Funk- und Rundfunk-Antennen sowie elektrische Wellen verwendeten Resolver.
Resolver wurden oft von optoelektronischen, digitalen Winkellagegebern sowie anderen Inkrementalgebern und Absolutwertgebern abgelöst, behaupten sich dennoch in vielen Anwendungen wie Textilmaschinen, Bergbaumaschinen und Servomotoren als robuste und kostengünstige Lösung. Ein Vorteil der bürstenlosen Resolver ist, dass sie bis auf die Lagerung verschleißfrei arbeiten, während bei einer Optoelektronik immer mit Verschmutzung zu rechnen ist. Bei Anlagen, die lange laufen sollen, kommt auch noch eine begrenzte Lebensdauer der LEDs hinzu.
Die robuste Konstruktion erlaubt es, Resolver auch in flüssigem Stickstoff (−197 °C), im Hochvakuum (bis +200 °C) und in hochradioaktiver Umgebung einzusetzen, also Bereichen, in denen andere Lagegeber versagen.
Literatur
- Jerome Kessler (Hrsg.): Synchro/Resolver Conversion Handbook. 5. Auflage. Data Device Corporation, Firmenschrift, 1999, LCCN 74-077038 (ddc-web.com [PDF; 1,5 MB] Erstausgabe: 1974).