Dauerstrichradar
Ein Dauerstrichradar ist ein Radarsystem, das sich von einem Impulsradar dadurch unterscheidet, dass der Sender während der Dauer des Messvorganges ununterbrochen arbeitet.[1] (Die Bezeichnung Dauerstrich stammt vom Strichsymbol beim Morsecode).
Die verschiedenen Funktionsprinzipien der Dauerstrichradare unterscheiden sich vor allem darin, ob und ggf. wie die gesendete Frequenz moduliert wird. Ein unmoduliertes Dauerstrichradar wird auch CW-Radar (von englisch continuous wave radar) genannt. Mit einem unmodulierten Dauerstrichradar können Entfernungen nur dürftig bestimmt werden. Es wurde vielmehr zur berührungslosen Geschwindigkeitsmessung mittels Doppler-Effekt entwickelt[2] und wird als Bewegungsmelder eingesetzt. Modulierte Dauerstrichradargeräte, auch FMCW-Radar (von englisch frequency modulated continuous wave radar) genannt, werden vor allem als Abstands- oder Höhenmesser oder als Navigationsradar mit geringer Reichweite auf Schiffen und Booten eingesetzt.
Geschichtliche Entwicklung
Bereits Heinrich Hertz beschrieb bei seinen praktischen Versuchen zu den Berechnungen Maxwells die Reflexion elektromagnetischer Wellen an metallischen (also elektrisch leitenden) Oberflächen. Dieses wurde von dem deutschen Ingenieur Christian Hülsmeyer aufgegriffen, der das erste Radar entwickelte, welches im Jahre 1904 von der Rheinbrücke in Köln öffentlich demonstriert und in der Folge in mehreren Staaten patentiert[3] wurde. Dieses Radar war in der Funktion ein Dauerstrichradar. Es konnte ein sich näherndes Schiff in einer Entfernung von bis zu 3 km Entfernung orten, und das, obwohl zu der Zeit keine empfindlichen Hochfrequenz-Baugruppen zur Verfügung standen. Als nichtmoduliertes CW-Radar konnte es prinzipiell keine Entfernungen messen. Hülsmeyer reichte ein zweites Patent[4] ein, welches die Messung einer Entfernung durch ein CW-Radar von einem erhöhten Standpunkt aus durch die Richtwirkung der Antenne und nachfolgender trigonometrischer Berechnung der Entfernung aus dem Abstrahlwinkel der Antenne ermöglichte. Beide Erfindungen stießen jedoch auf keinerlei Interesse in der deutschen Marineführung.
Die beiden Elektroingenieure Albert H. Taylor und Leo C. Young vom Naval Research Laboratory (USA) wurden durch Marconis Erfolge bei der drahtlosen Telekommunikation inspiriert. Sie orteten im Herbst 1922 mit einem Dauerstrichradar unter Verwendung einer bistatischen Konfiguration (das heißt: getrennte Sender- und Empfängerposition) erstmals ein hölzernes Schiff auf einer Wellenlänge von 5 Metern.[5] Bei diesem Experiment wurde durch die Lokalisierung von Sender und Empfänger am linken und rechten Ufer eines Flusses nicht eine Rückstreuung empfangen, sondern die Dämpfung und Streuung der elektromagnetischen Welle beim Durchqueren des Schiffes registriert. Dieses Prinzip wird in der Sicherungstechnik als Barriereradar angewendet.
Eine gezielte Entwicklung der Radartechnik erfolgte ab etwa 1935, nachdem der militärische Nutzen dieser Technologie erkannt wurde. Wegen der erforderlichen Reichweiten bei der Ortung von Schiffen und Flugzeugen lag der Schwerpunkt jedoch nicht beim Dauerstrichradar, sondern in der Impulsradartechnik. Das Dauerstrichverfahren geriet teilweise wieder in Vergessenheit, da mit den technischen Möglichkeiten der damaligen Zeit mit einem Dauerstrichradar nur geringe Reichweiten erzielt werden konnten.
Erste Überlegungen, eine Vermessung der Höhe der Ionosphäre durch ein frequenzmoduliertes Dauerstrichradar-Verfahren (FMCW-Radar) zu ermöglichen, wurden bereits 1920 formuliert.[6] Die Funktion eines Radar-Altimeters wurde im Jahre 1930 veröffentlicht.[7] Doch erst im Jahre 1938 wurde durch die Western Electric Company ein praktisch funktionierendes FMCW-Radar-Altimeter vorgestellt.[8]
Eine zivile Nutzung der Radartechnik wurde durch die militärische Geheimhaltung der Radartechnologien stark behindert. Es wurden als Folge der Ereignisse des Zweiten Weltkrieges direkte Verbote zur Forschung an Radartechnologien ausgesprochen, die 1960 aufgehoben wurden.[9] Erst sehr viel später wurden die Vorzüge eines CW- oder FMCW-Radars (einfacher Aufbau für relativ große Reichweiten bei geringster Sendeleistung)[11] gegenüber dem Impulsradarverfahren wiederentdeckt.[12] Das erste FMCW-Radar für atmosphärische Untersuchungen wurde 1969 gebaut.[13] Seit den 1970er Jahren[14] werden FMCW-Radare als Wetterradar sowie für gleichzeitige Entfernungs- und Geschwindigkeitsmessungen genutzt. Im Jahre 1976 wurde FMCW-Radar erstmals für Messungen der Dopplerfrequenz von Windgeschwindigkeiten eingesetzt.[15][16]
In den 1990er Jahren wurden Radarsysteme auf FMCW-Basis für Kraftfahrzeuge als Kollisionswarner und automatische Abstandsregelung (Abstandsregeltempomat, englisch Adaptive Cruise Control, ACC) entwickelt. In die Busse der Firma Greyhound Lines wurden 1600 FMCW-Radargeräte im Frequenzband 24 GHz eingebaut, welche die Unfallrate mit diesen Fahrzeugen im Jahre 1993 um 21 % senkten. Seit 1996 wird auf 77 GHz ein weitreichendes FMCW-Radar für automotive Sicherheit in Fahrzeugen von Daimler-Benz verwendet. Zu Beginn des Jahrtausends zogen andere Kfz-Hersteller nach.[17]
Mit zunehmender Verfügbarkeit immer höherer Frequenzbereiche und gleichzeitiger Miniaturisierung ermöglicht moderne Hybrid-Technik, kleinere CW- und FMCW-Radarmodule in großer Anzahl preisgünstig anzubieten.
Technische Realisierung
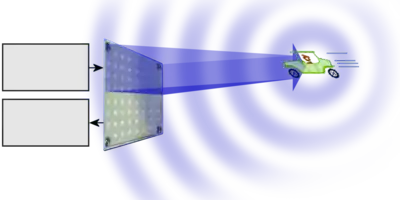
Ein Dauerstrichradar sendet eine hochfrequente elektromagnetische Welle in eine Richtung, welche durch die Richtwirkung der Sendeantenne vorgegeben ist. Trifft die elektromagnetische Welle auf ein Hindernis, so wird ein geringer Teil der Sendeleistung als Echosignal zurück zum Sender reflektiert und dort vom Empfänger registriert. Dieses Echosignal dient als Nachweis dafür, dass sich in Ausbreitungsrichtung der Welle ein Hindernis befindet. Aus den Eigenschaften des Echosignals (zum Beispiel: Stärke, Phasenlage, Frequenzspektrum) kann auf Eigenschaften des Hindernisses geschlossen werden.
Sender
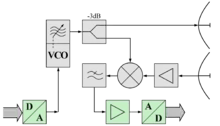
Oft sind die Radarmodule in der Lage, sowohl als CW-Radar als auch als FMCW-Radar konfiguriert zu werden. Der Transceiver eines FMCW-Radars enthält einen Hochfrequenzgenerator, der als ein spannungsgesteuerter Oszillator (englisch Voltage Controlled Oscillator, VCO) aufgebaut und dessen Ausgangsfrequenz abhängig von einer Steuerspannung ist. Ist diese eine Gleichspannung oder fehlt diese Regelmöglichkeit, so arbeitet das Modul als CW-Radar. Eine zu modulierende Signalform für ein FMCW-Radar wird oft mittels Direct Digital Synthesis oder direkte digitale Synthese (DDS) generiert und dem Hochfrequenzgenerator im Transceiver als Steuerspannung zugeführt. Die momentane Frequenz des VCO kann zum Beispiel sägezahnförmig mit der Periodendauer Τ verändert werden: es wird das Signal Ss(t) ausgesendet.
Für sehr hohe Frequenzen arbeitet der VCO oft auf einer niedrigeren Frequenz. Die Umsetzung in das gewünschte Radarfrequenzband geschieht durch einen nachgeschalteten Frequenzvervielfacher. Das kann im einfachsten Fall eine Frequenzverdopplung sein und kann bis zu einer Vervielfachung um den Faktor 25 reichen. Ein solcher Frequenzvervielfacher ist ein resonantes Bauteil (zum Beispiel ein Hohlraumresonator), welches durch eine IMPATT-Diode entdämpft sein kann.[18] Zum Beispiel kann der VCO eine Frequenz zwischen 7 und 8 GHz erzeugen, die nach einer eventuellen Modulation durch Verdreizehnfachung in das Band um 94 GHz umgesetzt wird. Hierbei ist zu beachten, dass durch die Frequenzvervielfachung die Modulation ebenfalls betroffen wird: eine Senderbandbreite von typisch 60 MHz würde nach der Vervielfachung zu einer Bandbreite von 780 MHz. Damit ist oft schon die mögliche Frequenztoleranz der Resonatorbaugruppe überschritten.[Anmerkung 1] Deshalb muss bei einer vorgesehenen Frequenzvervielfachung die modulierte Bandbreite des VCO verringert werden.
Die maximal mögliche Sendeleistung ist durch unvermeidliche Überkopplung zwischen Sender und Empfänger begrenzt. Da der Sender ständig arbeitet, gelangt ein Teil der Sendeleistung gleichzeitig mit dem verzögerten Echosignal an den Empfängereingang und überlagert dieses. Ist dieser übergekoppelte Anteil der Sendeleistung so groß, dass der Empfänger in die Begrenzung getrieben wird, können die sehr schwachen Echosignale nicht mehr aus diesem Signalgemisch getrennt und empfangen werden. Aus diesem Grunde werden meist getrennte Sende- und Empfangsantennen verwendet. Diese können durch eine zusätzliche Abschirmung und durch einen möglichst großen Abstand zueinander entkoppelt werden.
Durch die extrem geringen Sendeleistungen von CW- und FMCW-Radarmodulen, die meist im Bereich von ≤ 100 mW liegen, sind keine gesonderten Strahlenschutzmaßnahmen notwendig. Selbst bei einer starken Richtwirkung der Antenne ist eine sehr viel geringere Strahlungsdichte zu erwarten als diejenige, die im Normalbetrieb bei einem Mobiltelefon auftritt.
.png.webp)
- Anmerkung
- Frequenztoleranz ist eine Größe, die oft mit der −10-dB-Bandbreite gleichgesetzt wird. Die −10-dB-Bandbreite eines resonanten Bauteils ist die Bandbreite, innerhalb der der Reflexionsfaktor durch Fehlanpassung auf der Speiseleitung maximal −10 dB beträgt.
Antenne
Die Antenne ist oft eine integrierte Patchantenne: Sende- und Empfangsantenne sind auf einem Substrat aufgebaut und enthalten oft je 4, 16 oder mehr Patches. Je mehr Patches nebeneinander verwendet werden, desto schmaler ist das resultierende Antennendiagramm der Gruppe. Für einen einzelnen Patch sind Diagrammbreiten von etwa 130° typisch. Das kann durch eine Anordnung von 8 Patches nebeneinander auf etwa 12° verringert werden. Diese Patchantennen sind eine sehr preisgünstige Lösung. Durch eine nach links und rechts seriell verteilte Sendeleistung erhalten die Patches, die vom Speisepunkt am weitesten entfernt sind, die geringste Leistung. Diese Leistungsverteilung wird durch eine Variation der Breite der Zuleitung (Streifenleitung) beeinflusst. Oft ist sie eine Funktion nach einer Taylorreihe, was eine schmale Hauptkeule bei nur geringer Größe der Nebenkeulen bewirkt. Durch die verringerte Leistung am Rand des Antennenfeldes haben weitere hinzugefügte Strahlungselemente einen stetig verringerten Effekt, bis der ingenieurtechnische Aufwand für die Vergrößerung des Antennenfeldes und Verbesserung des Antennendiagramms nicht mehr gerechtfertigt wird. Das begrenzt die Anzahl der verwendeten Patches in der Antenne. Für sehr anspruchsvolle Anwendungen werden als effektivere Lösung die Sende- und Empfangsantenne vor je einem großen Parabolreflektor angeordnet, welche ein Antennendiagramm mit einem Öffnungswinkel von weniger als einem Grad bilden. Das Antennendiagramm ist im Datenblatt des Moduls oft als real gemessenes Diagramm enthalten.
Einfachere Module mit je einem kleinen Viertelwellendipol als Sende- und Empfangsantenne sind ebenfalls im Handel, die als Bewegungsmelder eine räumlich ausgedehntere Radarüberwachung ermöglichen. Je nach Anordnung dieses Moduls sind 180° bis 360° Radarabdeckung möglich.
Empfänger
In dem Modul befindet sich mindestens ein Abwärtsmischer, der das empfangene Signal in eine tiefere Frequenz umsetzt. Empfangen wird das reflektierte und durch die Laufzeit verzögerte Signal Se(t). Der Detektor des Moduls (hier der Mischer für die Abwärtsmischung in das Basisband) kann für eine Zerlegung des Ausgangssignals in eine gleichphasige (I-Signal) und eine Blindkomponente (Q-Signal) als sogenannter englisch Synchronous Detector für das I&Q-Verfahren ausgelegt sein. Zu diesem Zweck wird die letzte Abwärtsmischung in das Basisband doppelt ausgeführt. Es werden also zwei Mischstufen mit dem phasengleich geteilten Echosignal parallel gespeist. Die für die Abwärtsmischung genutzte LO-Frequenz (oder gegebenenfalls die Sendefrequenz) wird einmal phasengleich als Sinus (für das I-Signal, von englisch in phase), an der anderen Mischstufe um 90° phasenverschoben als Kosinus (für das Q-Signal, von englisch quadrature) bereitgestellt. Um die Informationen dieser beiden Ausgänge sinnvoll zu nutzen, muss die Schnittstelle die I&Q-Daten gleichzeitig auswerten. Eine Übertragung zum Rechner im Zeitmultiplex ohne Zwischenspeicherung genügt nicht, da bereits geringste Zeitunterschiede während der Messung zu zusätzlichen Phasenänderungen führen.
Bei der Betrachtung von Momentanwerten der an den Ausgängen anliegenden Frequenzen ist I der Realteil und Q der Imaginärteil eines komplexen Signals. Die Berechnung einer Amplitude nach dem Satz des Pythagoras und der Phasenlage nach einer Winkelfunktion ist bei Dauerstrichradar nicht notwendig. Da bei Dauerstrichradar keine Momentanwerte einer Sinusschwingung analysiert werden, sondern alle Messwerte über den gesamten Zeitraum der Messung zur Verfügung stehen, kann bei der Messung der Amplitude einer Wechselspannung gewartet werden, bis diese ihren Maximalwert erreicht hat und dann gleich dieser Maximalwert oder der Effektivwert gemessen werden. Das Signal am Q-Ausgang wird lediglich dahingehend überprüft, ob dessen Phasenlage zum I-Ausgang voreilt oder nacheilt.
Direktmischempfänger und die empfindlicheren Überlagerungsempfänger werten die Frequenzverschiebung aus, die bei bewegten Objekten durch den Dopplereffekt auftreten.
Direktmischempfänger
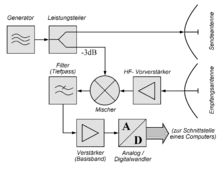
Ein Direktmischempfänger arbeitet nach dem Prinzip der homodynen Detektion. Das hochfrequente Empfangssignal wird nach einer Verstärkung direkt mit einem Teil des Sendesignals in einem Mischer überlagert und so in das Basisband transformiert. Der nachfolgende Verstärker arbeitet im Niederfrequenzbereich. Ein Doppler-Radarsensor wird meist als kleines Hybridmodul ausgeführt. Das Blockschaltbild zeigt den prinzipiellen Aufbau, der Analog/Digitalkonverter kann Teil des Moduls sein oder Bestandteil eines digitalen Signalprozessors.[20]
Der Vorteil des einfachen Aufbaus als Direktmischempfänger bedingt einige Nachteile:
- Für sehr langsame Radialgeschwindigkeiten ist die Dopplerfrequenz oft extrem niedrig und wird durch das 1/f-Rauschen des Abwärtsmischers überdeckt. Zusätzliche statistische Schwankungen der Phasenlage des Sendesignals, das sogenannte Phasenrauschen, erschweren die Messung sehr kleiner Dopplerfrequenzen.
- Dieses 1/f-Rauschen wirkt sich im Direktmischer besonders stark aus, da die Bauelemente der Mischer für sehr hohe Frequenzen ausgewählt wurden und deswegen im niederfrequenten Bereich oft stärker rauschen. Bei einem Überlagerungsempfänger kann dieses Rauschen die Bandpässe des ZF-Verstärkers nicht passieren. Wegen der hier erfolgten kräftigen Signalverstärkung (V > 1000) ist das Rauschen der zweiten Mischstufe bedeutungslos.
- Die maximal installierbare Sendeleistung ist begrenzt. Da Sender und Empfänger gleichzeitig arbeiten, wird immer ein Teil der Sendeenergie in den Empfangsweg direkt eingekoppelt. Bei zu hoher Sendeleistung geht der Empfänger daher in die Begrenzung, wodurch keine schwachen Echosignale mehr erkannt werden können.[21] Abhilfe kann hier nur geschaffen werden, wenn der Frequenzgang des Empfängers so eingerichtet wird, dass eine Dopplerfrequenz von Null nicht verarbeitet wird. Damit sind oft sehr langsame Bewegungen nicht mehr detektierbar.
- Ein schlechtes Verhältnis der begrenzten maximal möglichen Sendeleistung zur bei Direktmischempfängern ebenfalls begrenzten minimal möglichen Empfangsleistung bestimmt im Wesentlichen die maximal erzielbare Reichweite.
Das Verhältnis von Sendeleistung zu Empfangsleistung und die Auswirkung auf die Radarreichweite wird generell für alle Radargeräte durch die Radargrundgleichung beschrieben. In den meisten Anwendungsfällen ist als der größte Dämpfungsfaktor in dieser Gleichung die Zweiweg-Freiraumdämpfung zu nennen. Sie wird als r4 – Abhängigkeit ausgedrückt und beeinflusst die theoretisch mögliche Reichweite des Radars dramatisch (vergleiche: r2 – Abhängigkeit des Abstandsgesetzes, die hier zweimal auftritt: auf dem Hinweg und auf dem Rückweg). Um die Reichweite eines Radars zu verdoppeln, muss gemäß der Radargrundgleichung die Sendeleistung versechzehnfacht werden.
Überlagerungsempfänger
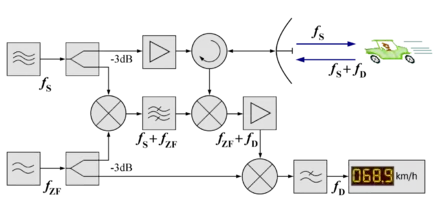
Die Empfindlichkeit wird verbessert, wenn der Direktmischer durch einen Überlagerungsempfänger ersetzt wird. Im ersten Mischer des Empfängers wird das Empfangsfrequenzband in ein niedrigeres Frequenzband der Zwischenfrequenz fZF (oft zwischen 10 MHz und 100 MHz) herabgesetzt. Aus der Sendefrequenz und einem zweiten hochstabilen Generator auf der Mittenfrequenz des Zwischenfrequenz-Verstärkers wird die zum Abwärtsmischen notwendige Lokaloszillatorfrequenz heraufgemischt und liegt um die Zwischenfrequenz oberhalb der Sendefrequenz. Durch die Umsetzung in ein niedrigeres Frequenzband können Bandfilter höherer Ordnung einfacher realisiert werden und helfen so den Einfluss des 1/f-Rauschens zu verringern. Die Verstärkerstufen können auf dieser Frequenz mit höherer Verstärkung ohne die Gefahr einer Selbsterregung (Eigenschwingung durch Rückkopplung) aufgebaut werden.
Ein zweiter Abwärtsmischer setzt das Echosignal in das Basisband um. Eine weitere Möglichkeit ist, die Empfangssignale direkt auf der Zwischenfrequenz in einem schnellen Analog-Digital-Umsetzer zu digitalisieren und die Abwärtsmischung digital durchzuführen.
Eventuelles Phasenrauschen sowie kleinere Frequenzsprünge der Oszillatoren führen zu kurzzeitigen Messfehlern bis hin zu einem Aussetzen des empfangenen Echosignals, welches während der Laufzeit dieses Frequenzsprunges außerhalb der Empfängerbandbreite liegt. Diese Messfehler werden unabhängig von der Art des Empfängers bei einem CW-Radar über die Zeit ausgemittelt. Auch hier bieten die steileren Filterflanken des Überlagerungsempfängers bessere Bedingungen.
Auch bei der Verwendung von nur einer Antenne und eines Zirkulators zur Trennung von Sende- und Empfangsweg gelangt ein Teil der Sendeenergie direkt in den Empfänger, da die Zirkulatoren die Ausgänge nicht ideal voneinander isolieren können. Es lassen sich Isolationswerte von typisch 18 dB[22] bis höchstens 30 dB erreichen. Das heißt: Mindestens ein Tausendstel der Sendeenergie liegt am Empfängereingang an. Schon ab einer Entfernung von etwa 5 m ist das Echosignal meist kleiner als dieses unerwünschte („parasitäre“) Signal. In einem hochwertigen Dauerstrichradar mit unveränderlicher Sendefrequenz und getrennter Sende- und Empfangsantenne kann mit einer Schaltungsmaßnahme das unvermeidliche Übersprechen intern teilweise kompensiert werden: Da dessen Amplitude in gewissen Grenzen konstant ist und immer mit gleicher Phasenlage erfolgt, kann durch konstruktive Maßnahmen bereits innerhalb der Sendeantenne ein Teil der Sendefrequenz ausgekoppelt und in den Hochfrequenz-Empfangsweg gegenphasig wieder eingekoppelt werden. Wenn Phasenlage und Amplitude passen, wird das von der Empfangsantenne erfasste äußere Übersprechen durch destruktive Interferenz ausgelöscht.[23]
Der Forderung nach einer hohen Stabilität des Generators für die Zwischenfrequenz fZF scheint das Blockschaltbild zu widersprechen: diese Frequenz wird einmal im Signalverlauf addiert… und danach wieder subtrahiert. Die absolute Größe dieser Frequenz ist also theoretisch unerheblich, praktisch muss sie nur im konstruktiv vorgegebenen Durchlassbereich des ZF-Verstärkers liegen. Sie darf sich aber während der Messung nicht ändern. Eine Drift der Zwischenfrequenz während der Laufzeit des Echosignals innerhalb des Empfängers führt zwangsläufig zu einem Messfehler. Praktisch sind hier vor allem solche Frequenzinstabilitäten relevant, die durch eine mechanische Vibration des Generators entstehen würden.
Unmoduliertes Dauerstrichradar (CW-Radar)
Funktionsweise
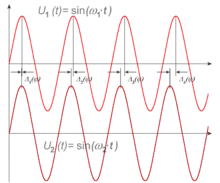
Ein unmoduliertes Dauerstrichradar sendet elektromagnetische Wellen mit einer konstanten Amplitude und einer konstanten Frequenz. Das Echosignal von bewegten reflektierenden Objekten unterscheidet sich von dieser gesendeten Frequenz durch eine überlagerte Dopplerfrequenz. Die Frequenzdifferenz zwischen Sendesignal und Echosignal ergibt am Ausgang der Mischstufe die Dopplerfrequenz. Echosignale von Festzielen würden eine Gleichspannung am Empfängerausgang ergeben und werden oft durch eine übertragergekoppelte Mischstufe ausgeblendet. Auch hier tritt eine Laufzeit zwischen Sendesignal und Echosignal auf. Durch die Periodizität der Sinusschwingung kann diese nur als Phasenunterschied gemessen werden. Wie viele volle Perioden der Sinusschwingung zusätzlich zu diesem messbaren Phasenunterschied vergangen sind, kann nicht festgestellt werden. Somit ist eine absolute Entfernungsmessung mit einem einzelnen CW-Radar nicht möglich (s. u.).
Geschwindigkeitsmessung
Für eine Geschwindigkeitsmessung wird als Messgröße die Dopplerfrequenz fD verwendet. Bei Radargeräten ist zu beachten, dass der Dopplereffekt stets zwei Mal auftritt: Einmal auf dem Weg vom Sender zum reflektierenden Objekt (Signalquelle in Ruhe, Beobachter bewegt). Dort wird die bereits dopplerverschobene Welle reflektiert und der Dopplereffekt tritt ein zweites Mal auf dem Rückweg zum Empfänger auf (jetzt: Beobachter in Ruhe, Signalquelle bewegt). Die Dopplerfrequenz wird bei monostatischen Radargeräten (also solchen, bei denen Sender und Empfänger an einem Standort arbeiten) deshalb nach der Gleichung berechnet:[24]

wobei vr die Radialgeschwindigkeit des reflektierenden Objektes ist und λ die Wellenlänge der Sendeenergie. Ein Objekt mit der Geschwindigkeit v = 5 m/s erzeugt bei einer Oszillatorfrequenz von 24 GHz die Dopplerfrequenz fD = 800 Hz, die im Hörbereich liegt und technisch einfach auswertbar ist. Das „ungefähr“-Zeichen in der Formel kann in den meisten Fällen durch ein Gleichheitszeichen ersetzt werden. Es hat seine Ursache in der Bedingung für die Gültigkeit der Gleichung. Das ist einerseits die Forderung, dass die Radialgeschwindigkeit sehr viel kleiner als die Lichtgeschwindigkeit sein muss (was in allen bekannten Fällen zutrifft) und dass sich andererseits die Ausbreitungsgeschwindigkeit der elektromagnetischen Wellen während der Messung nicht ändert. Das kann in einigen Anwendungsfällen vereinzelt vorkommen, zum Beispiel beim Durchqueren von Schichten unterschiedlicher Dichte der Luft in der Atmosphäre oder bei der Anwendung als Füllstandsmesser, da die Ausbreitungsgeschwindigkeit in Luft eine Andere ist, als in Flüssigkeiten oder festen Stoffen (Schüttgut). Das wirkt sich zum Beispiel bei Füllstandsmessern so aus, dass der Boden des Behälters bei vollem Behälter weiter weg zu sein scheint als bei leerem Behälter.
.jpg.webp)

Wenn eine Messung der Geschwindigkeit nicht direkt in Bewegungsrichtung des Objektes geschieht, so unterscheidet sich die gemessene Radialgeschwindigkeit von der realen Geschwindigkeit des Objektes. Zum Beispiel wird das im Bild gezeigte mobile Messsystem zur Geschwindigkeitsüberwachung im Straßenverkehr eingesetzt und arbeitet im K–Band auf der Frequenz 24,125 GHz.[25] Das System kann in ein Messfahrzeug eingebaut oder auf einem Spezialstativ betrieben zur Überwachung des fließenden Verkehrs mit fotografischer Dokumentation von Verkehrsübertretungen eingesetzt werden. Mit diesem Gerät können Geschwindigkeiten von 20 km/h bis 250 km/h gemessen werden. Die Geschwindigkeit des ankommenden und/oder abfließenden Verkehrs kann vom rechten oder linken Straßenrand aus gemessen werden. Jedes Gerät muss individuell geeicht werden und wird für einen Betrieb in einem Winkel θ von 20° bis 22° schräg zur Fahrbahn eingestellt. Nur durch diesen festen Abstrahlwinkel ist eine ausreichend genaue Berechnung der Fahrgeschwindigkeit aus der gemessenen Radialgeschwindigkeit möglich:
- hier:


Eine leichte Ungenauigkeit in der Ausrichtung des Dauerstrichradars zur Fahrbahn hat in diesem Winkelbereich also nur einen geringen Einfluss auf die Geschwindigkeitsberechnung und ist kleiner als die vorgegebene Messtoleranz.
Ein Erkennen mehrerer Objekte mit verschiedenen Geschwindigkeiten ist mit einem Dauerstrichradar möglich, erhöht jedoch den Aufwand. Da sich alle Dopplerfrequenzen im Empfänger überlagern, müssen sie durch parallel arbeitende Filter voneinander getrennt werden. Praktisch bedeutet dies, dass für jede zu erwartende Dopplerfrequenz ein eigenes Filter mit nachfolgender Schwellwertschaltung und Erkennungslogik aufgebaut werden muss.[26] Da die mögliche Anzahl dieser Filterkanäle begrenzt ist, ist sowohl die Messgenauigkeit als auch das Auflösungsvermögen des Dauerstrichradars eingeschränkt. Eine Zuordnung der gemessenen Dopplerfrequenz zu dem jeweiligen Ziel ist mit dem unmodulierten CW-Radar nicht möglich. In der Praxis wird meist auf eine solche Unterscheidung verzichtet, stattdessen wird nur die zum Messzeitpunkt intensivste Dopplerfrequenz ausgewertet. Für die Geschwindigkeitsmessungen von Polizei oder Ordnungsamt heißt das, dass wenn auf dem Bild mehrere Fahrzeuge erkennbar sind, so kann meist nicht bewiesen werden, zu welchem Fahrzeug die gemessene Geschwindigkeit gehört.
Bei einfacher Abwärtsmischung mit dem Ziel der Messung des Betrages einer Dopplerfrequenz geht die Information verloren, in welche Richtung sich das reflektierende Objekt bewegt hat. Manche Doppler-Radarsensoren können auch mit dem I&Q-Verfahren eine Phaseninformation bereitstellen. Damit ist die Auswerteschaltung in der Lage, zusätzlich zur Geschwindigkeit eine Bewegungsrichtung zu erkennen. Das ist keine Winkelmessung: das heißt hier lediglich, dass das Radar erkennen kann, ob sich das Objekt mit der gemessenen Radialgeschwindigkeit zur Antenne hin oder von der Antenne weg bewegt hat.
Abstandsüberprüfung
Unter bestimmten Bedingungen kann ein Dauerstrichradar eine Entfernungsänderung in der Größenordnung der halben Wellenlänge des Senders, also von einigen Millimetern messen. Hierzu wird keine Dopplerfrequenz ausgewertet, sondern es wird eine Phasenlage zwischen Sende- und Empfangswelle überprüft und eine Änderung dieser Phasenlage entweder mit einem Speicheroszilloskop oder Spektrumanalysator[27] oder einem Computer mit entsprechender Software zur Registrierung der Änderung ausgewertet.
Dieser Betrieb ist möglich, wenn eine hochwertige Mischstufe, zum Beispiel ein HF-Ringmodulator oder eine Gilbertzelle verwendet wird. Wird diese mit zwei identischen, jedoch phasenunterschiedlichen sehr hohen Frequenzen an den Eingängen gespeist (das heißt, die Frequenzen sind zueinander nur zeitlich etwas verschoben), so erscheint an dessen Ausgang eine Gleichspannung, welche die Größe der Phasendifferenz zwischen beiden Eingangsfrequenzen präsentiert. Um diese Spannung auswerten zu können, müssen die internen Mischeranschlüsse und die weitere Signalverarbeitung gleichstrommäßig gekoppelt sein. Dieser messbare Phasenunterschied kann durch die Periodizität der Sinusschwingung der Trägerfrequenz in einem einzelnen CW-Radar keine eindeutige Entfernungsbestimmung bereitstellen. Wie viele vollständige Perioden der Sinusschwingung zusätzlich zu dieser gemessenen Phasendifferenz hinzukommen, kann nicht bestimmt werden.
Da die verwendeten Dioden im Ringmodulator eine bauarttypische Durchlassspannung haben, ist der Zusammenhang von Phasendifferenz und Gleichspannung nicht linear und sehr kleine Phasendifferenzen ergeben keine eindeutigen Änderungen der Ausgangsspannung. Deswegen (und wegen der fehlenden Eindeutigkeit) kann diese Betriebsart nicht als Messung bezeichnet werden, sondern nur als Überprüfung.
Das Echosignal muss zur Auswertung eine sehr starke Amplitude aufweisen, da sich trotz der Richtwirkung der Antennen ein Teil der starken Sendeenergie (relativ zur Empfangsenergie) durch Superposition mit dem Echosignal an der Empfangsantenne überlagert. Diese von der Sendeantenne direkt auf den Empfangsweg wirkende Energie (sogenanntes Übersprechen) ist gegebenenfalls stärker als ein Echosignal aus etwa 5 m Entfernung. Die notwendige gleichstrommäßige Kopplung verringert die mögliche Empfängerempfindlichkeit und somit die erzielbare Reichweite empfindlich. Es wird also entweder eine sehr geringe Messentfernung oder ein quasi-bistatischer Betrieb (also eine bestimmte Entfernung zwischen Sendeantenne und Empfangsantenne) mit Abschirmung zwischen beiden Antennen vorausgesetzt. Das Echosignal kann durch den Einsatz von Winkelreflektoren verstärkt werden.
Entfernungsmessung
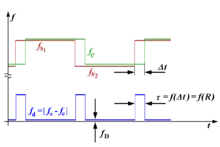
Auch mit unmoduliertem Dauerstrichradar ist mit gewissen Einschränkungen eine Entfernungsmessung möglich. Dazu müssen zwei gleiche unmodulierte Dauerstrichradarmodule, mit geringfügig unterschiedlichen Sendefrequenzen f1 und f2, unabhängig voneinander parallel betrieben werden, deren Ausgangssignale einer gemeinsamen Signalverarbeitung unterliegen.[28] Bei der Ausbreitung der elektromagnetischen Wellen entsteht eine Schwebung beider Schwingungen. Die Zielentfernung kann mittels der Phasendifferenz ΔΦ zwischen beiden Echosignalen bestimmt werden, wobei die Möglichkeiten der Geschwindigkeitsmessung in beiden Kanälen erhalten bleiben. Es werden also beide Ausgangssignale der Dauerstrichradarmodule auf die Eingänge einer Phasenmessschaltung gegeben. Die Phasendifferenz ist proportional zu der Frequenzdifferenz der Sender und der Entfernung R(t) zum Ziel:

Der Frequenzunterschied (f1 - f2) muss so gewählt werden, dass die Phasendifferenz für die energetisch maximal mögliche Entfernung den Wert 2π nicht überschreitet. Er soll also kleiner oder gleich dem Kehrwert der maximal zu erwartenden Laufzeit sein:


Er sollte zusätzlich größer als die jeweiligen Empfängerbandbreiten sein, damit gegenseitige Störungen ausgeschlossen werden. Sollten an dem Phasenmesser zwei Paare harmonischer Schwingungen mit zwei unterschiedlichen Phasendifferenzen anliegen, was einer Messung von zwei Zielen in unterschiedlicher Entfernung entspricht, so kann nur die Phasendifferenz der Summe dieser Schwingungen angezeigt werden. Das heißt, mit dieser Methode kann lediglich die Entfernung zu einem Ziel gemessen werden; es kann kein Auflösungsvermögen nach der Entfernung geben.
Werden preiswerte Dauerstrichradarmodule als Transceiver im K-Band verwendet, müssen sie danach ausgesucht werden, dass sie sich nicht gegenseitig stören, also im Testbetrieb direkt gegenüber jeweils keine Ausgangssignale ausgeben. Dann ist die Differenzfrequenz (bewirkt durch die Streuung der Toleranzen verschiedener frequenzbestimmender Bauelemente) größer als die Empfängerbandbreite. Bei einer Frequenzdifferenz von zum Beispiel 100 kHz liegt die maximale eindeutige Messentfernung bei 3 km. Bei Verwendung einer dritten Sendefrequenz kann die maximale eindeutige Messentfernung entsprechend erweitert werden, da eine Wiederholung einer gegebenen Kombination einer Phasendifferenz zwischen drei verschiedenen Frequenzen erst sehr viel später erfolgen kann.
Dieses Verfahren wird Multi-Frequency Ranging (MFR) genannt[29] (auf Deutsch etwa: Entfernungsmessung mit mehreren Frequenzen). In der Praxis werden dafür jedoch keine zwei (oder mehr) unmodulierten CW-Radargeräte verwendet, sondern ein frequenzmodulierbares CW-Radar, welches auf den verschiedenen Frequenzen im Zeitmultiplex arbeitet und somit den FMCW-Radargeräten zugeordnet wird.
Anwendungen von unmoduliertem Dauerstrichradar
Der Einsatz von Dauerstrichradargeräten zur Geschwindigkeitsmessung ist vielfältig und wird immer dort vorgenommen, wo eine berührungslose Messung nötig ist.
- Eine breite Anwendung ist im Sport gegeben: zur Messung von Ballgeschwindigkeiten zum Beispiel beim Torschuss bei Fußball oder Handball; oder den Ballgeschwindigkeiten bei Tennis, Tischtennis oder Golf;[30] sowie im Wintersport zur Messung der Geschwindigkeit an Bob- oder Rodelbahnen, als Absprunggeschwindigkeit bei Skispringen oder dem Messen von Geschwindigkeiten an besonderen Abschnitten bei Abfahrtsläufen.
- Zur Messungen der Geschwindigkeit im Straßenverkehr werden für den mobilen Einsatz CW-Radargeräte genutzt. Die bei den Radargeräten durch die notwendige Kalibrierung zur Messung zugelassenen Geschwindigkeiten sind oft nach unten auf 20 km/h begrenzt. Bei kleineren Geschwindigkeiten würde das Phasenrauschen des Hochfrequenzgenerators einen zu großen Einfluss auf die gemessene (dann sehr kleine) Dopplerfrequenz haben, so dass diese Messungen in der Folge juristisch unbrauchbar wären.
- Bei einem Bewegungsmelder wird auf eine Geschwindigkeitsbestimmung verzichtet. Stattdessen wird nur geprüft, ob die Dopplerfrequenz einen vorgegebenen Wert überschreitet, denn dann bewegt sich ein Gegenstand mit der gewählten Mindestradialgeschwindigkeit im Strahlungsbereich. Das Schaltsignal wird von einer übergeordneten Steuerung, beispielsweise einer Alarmanlage oder einer Steuerung für eine Video- oder Infrarotkamera (in einer sogenannten „slew-to-cue“-Konfiguration), ausgewertet. (Für dieses „slew-to-cue“ gibt es keine sinnvolle deutsche Übersetzung. Es bedeutet in etwa so viel wie: „durch einen Hinweis veranlasster Kameraschwenk“.)
- Diese Bewegungsmelder werden neben Infrarotsensoren auch zur Steuerung von Türöffnern verwendet. Sie können beim Vorbeifahren von Kraftfahrzeugen, die mit einer (in einigen Ländern illegalen) Radarwarnanlage ausgerüstet sind, bei dieser einen Fehlalarm auslösen.[31]
- Eine militärische Anwendung fand das Prinzip beim Flugabwehrraketensystem HAWK und beim Sea Sparrow in der Form eines bistatischen Radars. Das Ziel wurde mit einem starken Dauerstrichradar (High-Power Illuminator Radar, HPIR) beleuchtet. In der halbaktiven Rakete befanden sich zwei Richtantennen: eine im Bug auf das Ziel gerichtet und eine am Heck auf den Sender gerichtet. Aus dem Vergleich der Signalstärken von Heck- und Bugantenne konnte auf eine bevorstehende Annäherung zum Ziel geschlossen werden.
- Das Prinzip der Abstandsüberprüfung kann als Sonderfall der Anwendung für eine berührungslose Messung von Atmung[32] und Herztätigkeit[33] eines Intensivpatienten angewendet werden. Dieses Verfahren konnte sich bis jetzt jedoch klinisch nicht durchsetzen.
Moduliertes Dauerstrichradar
Unmodulierte Dauerstrichradargeräte (auch Doppler-Radar genannt) können lediglich Änderungen der Entfernung von Objekten messen (radiale Geschwindigkeiten), nicht jedoch absolute Entfernungen, weil der Zeitbezug für eine Messung der absoluten Laufzeit des Sendesignals fehlt. Wenn im Gegensatz dazu das Signal zeitlich verändert (moduliert) wird, kann die Laufzeit der Veränderung des Sendesignals gemessen werden. Im Prinzip ist jede Art von Modulation (Frequenzmodulation, Phasenmodulation und Amplitudenmodulation) geeignet, um die ausgesendete Welle mit Marken zu versehen, die nach dem Empfang auf die Laufzeit zurückschließen lässt. Eine Art der Amplitudenmodulation führt zum Impulsradar. Weil unterschiedliche Objektgrößen und -reflektivität den Amplitudenverlauf des Echos stark beeinflussen, wird in Dauerstrichradargeräten fast ausschließlich Frequenzmodulation verwendet und die diese Verfahren nutzenden Geräte werden als frequenzmoduliertes Dauerstrichradar oder FMCW-Radar bezeichnet. Diese können in ihrer Funktion auch als bildgebendes Radar genutzt werden.
Frequenzmoduliertes Dauerstrichradar (FMCW-Radar)
Funktionsweise
FMCW-Radare arbeiten oft mit einer periodischen Frequenzmodulation, die für einen hohen Anspruch an eine Genauigkeit der Messung möglichst zeitlinear sein muss.[34] Die oft vorhandene Nichtlinearität der Änderung der Ausgangsfrequenz als Funktion der Steuerspannung wird durch eine Vorverzerrung der digital erzeugten Abstimmungsspannung kompensiert, welche eine Abweichung vom linearen Verlauf in die entgegengesetzte Richtung wie der Hochfrequenzgenerator aufweist. Historische FMCW-Radargeräte haben auch eine sinusförmige Modulation benutzt.
Die Modulation wird meist zyklisch vorgenommen. Ein solcher Durchgang von der tiefsten bis zur höchsten Frequenz wird als Signalfolge (meist englisch Burst) bezeichnet. Der Frequenzhub eines solchen Bursts kann einige Gigahertz betragen. Die Steilheit der Frequenzänderung hat einen Einfluss auf das Auflösungsvermögen des FMCW-Radars. Da gleichzeitig die Bandbreite des Empfängers dann aber die maximal mögliche Frequenzänderung begrenzt, muss zwischen Auflösungsvermögen und Reichweite ein Kompromiss gefunden werden.
Ausschließliche Entfernungsmessung
Während der Zeit Δt = 2r/c, die das ausgesendete Signal benötigt, um mit Lichtgeschwindigkeit c die Entfernung r zum reflektierenden Objekt zweimal (hin- und zurück) zu durchlaufen, hat sich die Frequenz des Senders bereits verändert. Je schneller die Frequenz verändert wird, je größer also die Steilheit der Frequenzänderung df/dt, desto größer ist der Effekt. Falls kein Dopplereffekt zu berücksichtigen ist, beträgt Δf = Δt · df/dt und die Entfernung lässt sich folgendermaßen berechnen:

Wenn sich das reflektierende Objekt relativ zum Radar bewegt, verschiebt sich das Echo um die Doppler-Frequenz fD nach oben oder unten. Diese Frequenzänderung kann bei einer sägezahnförmigen Modulation nicht eindeutig einer Entfernung oder einer Geschwindigkeit zugeordnet werden und erzeugt deshalb einen Messfehler. Dieser wird umso geringer, je größer die Steilheit der Frequenzänderung gewählt wird. Wenn zum Beispiel ein FMCW-Radar im K-Band eine Frequenzänderung mit 100 MHz pro Mikrosekunde verwendet und insgesamt eine Bandbreite von 250 MHz nutzt, arbeitet das Radar zwar nur im Bereich von wenigen 100 Metern mit eindeutiger Messentfernung. Dafür kann eine mögliche Dopplerfrequenz im Kilohertzbereich, entspricht hier einer Geschwindigkeit von etwa 10 m/s, vernachlässigt werden.
Je steiler die Frequenzänderung erfolgt, desto größer ist die Frequenzdifferenz für eine gegebene Zeitdifferenz und das Entfernungsauflösungsvermögen des FMCW-Radars verbessert sich. Gleichzeitig wirkt die Begrenzung durch die installierte maximale Senderbandbreite sehr viel früher und die maximale eindeutig bestimmbare Messentfernung verringert sich. Umgekehrt gilt: wenn die Frequenzänderung flacher (sprich: langsamer) erfolgt, so vergrößert sich diese eindeutig bestimmbare Messentfernung. Die Wahl dieses Parameters ist also ein Kompromiss zwischen Reichweite, Genauigkeit (wegen der Messfehler durch Dopplerfrequenz) und der Entfernungsauflösung.
Simultane Messung von Entfernungen und Geschwindigkeiten
Dreieckförmige Modulation
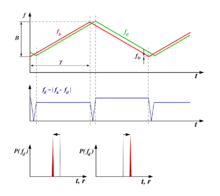
Die Verwendung einer dreieckförmigen Modulationsform bietet die Möglichkeit, die Dopplerfrequenz als Maß für eine Radialgeschwindigkeit als unabhängige Messgröße neben der Entfernungsmessung zu ermitteln. Während der Annäherung erhöht sich die Empfangsfrequenz und vermindert so während der steigenden Flanke den Betrag der Differenzfrequenz. Durch die Überlagerung mit der Dopplerfrequenz ist die Frequenzdifferenz bei Messung einer Annäherung in der ansteigenden Flanke der dreieckförmigen Modulation geringer, in der fallenden Flanke ist sie um den gleichen Betrag höher als bei einem statischen Reflektor. Bei betragsmäßig gleicher Steilheit der Frequenzänderung in steigender und fallender Flanke des Dreiecksignals ist der Mittelwert der Differenzfrequenzen aus beiden Messperioden ein Entfernungsmaß, unabhängig von der Geschwindigkeit. Die Summe der Differenzfrequenzen ist ein Maß für die halbe Radialgeschwindigkeit des Objekts. An die Linearität der Frequenzänderung werden jetzt besonders hohe Anforderungen gestellt.
Um die primären Messergebnisse in ein Bild umzurechnen, müssen die gemessenen Frequenzen mittels Filter erkannt und anschließend die Frequenzen der steigenden Flanke mit den Frequenzen der fallenden Flanke der Dreiecksmodulation korreliert werden. Erst danach kann ein Mittelwert für die Entfernung und die halbe Differenz für die Radialgeschwindigkeit errechnet werden.
In einem Szenario mit mehreren reflektierenden Zielen können bei der Verwendung einer dreieckförmigen Modulation Mehrdeutigkeiten auftreten. Die gemessenen Dopplerfrequenzen und die Frequenzänderungen durch die Laufzeit können durch die Signalverarbeitung nicht mehr eindeutig einem bestimmten Ziel zugeordnet werden. Durch Zuordnung der gemessenen Dopplerfrequenz des einen Zieles zu dem entfernungsbestimmenden laufzeitbedingten Frequenzhub eines zweiten Zieles können sogenannte Geisterziele entstehen. Diese Mehrdeutigkeiten können dadurch ausgeschlossen werden, dass alternierend Messzyklen mit unterschiedlichem Frequenzhub angewendet werden und nur diejenigen Ziele zur Anzeige gelangen, die in beiden Messzyklen auf der gleichen Position auftreten.
Durch diesen relativ hohen Rechenaufwand zur Berechnung der Geschwindigkeit und zur Korrektur der Entfernung wird diese Modulationsform nur noch selten verwendet und wird mehr und mehr durch die folgende Frequency-Shift-Keying-Methode (eine Modulationsform mit Frequenzumtastung) ersetzt, die eine erheblich einfachere Signalverarbeitung bietet.
Frequency Shift Keying
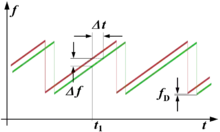
Mit der Modulation unter der Bezeichnung Frequency Shift Keying (FSK) kann das frequenzmodulierte Dauerstrichradar Eigenschaften annehmen, die einem Impulsradar ähneln. Es wird keine sägezahn- oder dreieckförmige Modulationsspannung verwendet, sondern eine rechteckige. Deshalb arbeitet das FMCW-Radar wie ein CW-Radar, springt jedoch periodisch zwischen zwei Sendefrequenzen hin- und her. Diese liegen relativ dicht beieinander, damit die Echosignale beider Frequenzen in die Bandbreite des Empfängers passen. Ab dem Frequenzsprung des Senders wird die Laufzeit gemessen, bis dieser Frequenzsprung im Echosignal registriert wird. Daraus wird wie beim Impulsradar die Entfernung zu dem reflektierenden Objekt bestimmt.
Anschließend wird die Dopplerfrequenz bestimmt und daraus die Geschwindigkeit berechnet. Technisch wird nach dem Frequenzsprung im Sender erst einmal eine relativ hohe Differenzfrequenz nach der Mischstufe im Empfänger auftreten. Deren Größe ist die installierte Differenzfrequenz der beiden Sendefrequenzen plus/minus einer möglichen Dopplerfrequenz. Aus diesem Signal lässt sich die Radialgeschwindigkeit eines Objektes leicht ableiten. Die Erkennung mehrerer Dopplerfrequenzen ist theoretisch mit einer Filterbank möglich. Es ist bei diesem Modulationsverfahren jedoch nicht möglich, diese Dopplerfrequenz dann einem bestimmten Ziel zuzuordnen. Wenn dieser ausgesendete Frequenzsprung nach der Laufzeit (zum Objekt und zurück) den Empfänger erreicht, ist dieser Zustand mit der relativ hohen Differenzfrequenz beendet. Die Hüllkurve dieser Differenzfrequenz ist ein Rechteckimpuls, dessen Impulslänge ein Maß für die Entfernung zwischen Radar und reflektierendem Objekt ist. Überlagern sich mehrere dieser Entfernungen, hat die fallende Flanke dieser Hüllkurve die Form einer Treppenspannung. Jede fallende Teilflanke dieser Treppenspannung steht für ein einzelnes Echosignal und ist durch einen Hochpass leicht zu detektieren: je später diese Flanke auftritt, desto weiter ist das reflektierende Objekt entfernt. Eine mögliche Dopplerfrequenz hat keinen Einfluss auf diese Flanke, diese Quelle für einen systematischen Messfehler entfällt deshalb beim FSK-FMCW-Radar.
Einige praktisch erprobte Auswerteschaltungen können durch Messung des Phasenunterschiedes zwischen beiden genutzten Sendefrequenzen eine extreme Genauigkeit in der Entfernungsbestimmung bis hinab zur Wellenlänge der Sendefrequenz erzielen.[35] Das Messprinzip entspricht etwa der Messung einer Entfernung mit zwei unmodulierten Dauerstrichradargeräten. Eine Kombination dieser Auswertung mit der hier beschriebenen Laufzeitmessung des Frequenzsprunges kann die Mehrdeutigkeiten in der Entfernungsmessung bei reiner Phasenmessung überwinden, die durch Phasenunterschiede größer als π auftreten können. Als Nachteil bleibt erhalten, dass mit dieser Methode nur ein einziges Ziel gemessen werden kann, da am Ausgang der Mischstufe nur eine einzelne Phase messbar ist. Vorteil ist hingegen, dass wenn sich zwei Phasenlagen überlagern und nicht auswertbar sind, dann wenigstens die ungenauere Messentfernung aus der Zeitmessung erhalten bleibt.
Stepped-Frequency Continuous Wave (SFCW)
Die Funktion des SFCW-Radar ist eine Erweiterung der Funktion eines FSK-FMCW-Radar. Stepped frequency heißt hier so viel wie „schrittweise Änderung der Frequenz“. Die Frequenzänderung kann nach einem Muster ähnlich einer Treppenspannung folgen, oder zum Beispiel nach dem Costas Code. Durch die Laufzeitmessung wie beim FSK-Verfahren ist eine eindeutige Entfernungsmessung möglich. Diese kann durch Messungen der Phasenlage dann präzisiert werden (ähnlich der Entfernungsmessung unter Verwendung von zwei unmodulierten CW-Radargeräten). Da viele verschiedene Frequenzen innerhalb eines Durchlaufs des Modulationsmusters (dem sogenannten Scan) miteinander verglichen werden können, sind sehr präzise Messungen möglich.
Jedoch auch hier gilt das unter dem Punkt Entfernungsmessung mit CW-Radar genannte Problem, dass wegen der Unmöglichkeit, zwei verschiedene sich überlagernde Phasenverschiebungen zu trennen, nur ein einzelnes Ziel gemessen werden kann. Praktisch ist dies immer das Ziel mit der größten Empfangsleistung. In den meisten Fällen ist das gemäß der r4 – Abhängigkeit der Amplitude des Echosignals auch das Ziel mit der geringsten Entfernung zum Radar.
Elektronische Schwenkung des Antennendiagramms
Bei einer sägezahn- oder dreieckförmigen Modulation ist eine gleichzeitige elektronische Schwenkung des Antennendiagramms für eine flächenhafte Abtastung durch ein FMCW-Radar möglich. Da zu jedem Zeitpunkt auf der Flanke des Sägezahnes die gleiche Entfernung durch die gleiche Frequenzdifferenz gemessen wird, ist die Entfernungsmessung über den gesamten Frequenzbereich mehrfach redundant. Das kann einerseits ausgenutzt werden, um mit schwächerer Sendeleistung eine Signalintegration durchzuführen, um so die Störfestigkeit zu verbessern und die Reichweite zu erhöhen. Hat das Radar jedoch relativ große Leistungsreserven, so ist eine solche Signalintegration für die Zielerkennung nicht notwendig. Das wird bei einigen FMCW-Radargeräten ausgenutzt um diese Sendefrequenzänderung gleichzeitig für eine elektronische Strahlschwenkung zur Abtastung des Raumes zu verwenden.[36]
Technisch realisiert wird das wie bei einer Phased-Array-Antenne mit frequenzabhängiger Strahlschwenkung. Mehrere nebeneinander liegende Antennen werden seriell gespeist, zum Beispiel aus einem Hohlleiter mit vielen Schlitzantennen. Zwischen den Einzelstrahlern befinden sich Umwegleitungen mit fester Länge. Für die mittlere Sendefrequenz entspricht dieser Umweg exakt der Wellenlänge. Bei dieser Sendefrequenz zeigt das resultierende Antennendiagramm in Richtung der Mittelachse der Antennengruppe. Steigt die Frequenz an, so verringert sich die Wellenlänge und die mechanisch festgelegte Umwegleitung zwischen den Einzelstrahlern ist jetzt etwas zu lang. Es entsteht eine Phasenverschiebung von Strahler zu Strahler, welche in der Summe eine elektronische Strahlschwenkung bewirkt. Die letzte Antenne in der seriellen Speisung erhält die Schwingung um die Summe dieser Phasenverschiebungen später als die erste. Die resultierende Wellenfront dieser Antennengruppe wird damit von der Mittelachse in Richtung der letzten Einzelantenne geschwenkt. Somit wird mit einer stationären Antennengruppe ein Sektor von bis zu 90° abgetastet und ersetzt eine mechanische Antennenschwenkung oder -drehung.
Anwendungen von moduliertem Dauerstrichradar
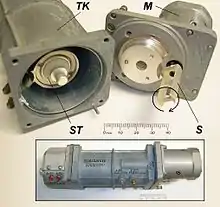
- unten: montierte Baugruppe
- links: Topfkreis TK mit Scheibentriode ST
- rechts: Deckel mit von Motor M angetriebenen Sektorelement S für eine kapazitiv gesteuerte Frequenzmodulation

- Diese Art der Entfernungsermittlung wird in der industriellen Messtechnik zum Beispiel zur Füllstandsmessung von Schüttgut oder Flüssigkeiten in Containern und Silos eingesetzt. Bei Einsatz unterschiedlicher Frequenzen kann zusätzlich die Dicke von Schaumschichten auf Flüssigkeiten gemessen werden. Ist das Füllmaterial für elektromagnetische Wellen semitransparent, so erscheint als zusätzlicher Messwert die Bodenfläche des Behälters. Bei der Entfernungsberechnung sind die unterschiedlichen Ausbreitungsgeschwindigkeiten der elektromagnetischen Wellen in der Luft (die möglicherweise unter Druck steht), in eventuell vorhandenem Schaum sowie im Füllmedium zu berücksichtigen. Die Ausbreitungsgeschwindigkeit im Füllmedium ist stets kleiner als in Luft, weshalb der Behälterboden bei hohem Füllstand weiter weg zu sein scheint als bei leerem Behälter. Neben dem an der Flüssigkeitsoberfläche oder am Schaum reflektierten Nutzsignal entstehen Störsignale, zum Beispiel durch Reflexionen an Anbauten innerhalb des Tanks oder durch ein Rührwerk.
- Oft wird für die Auswertung des Messsignals ein Mikroprozessor genutzt, der diese Störsignale herausrechnen kann, weil deren Positionen nach einem längeren Betrieb bekannt sind. Ein weiteres rechnergestütztes Verfahren wird Multi-echo Tracking genannt.[37][38] Diese Radargeräte sind meist nur zum Betrieb innerhalb geschlossener abgeschirmter Behälter zugelassen, da sie eine Sendefrequenz nutzen, deren Abstrahlung in den freien Raum durch die Bundesnetzagentur nicht erlaubt wird.
- FMCW-Radargeräte im dreistelligen Gigahertzbereich, samt Antennen auf einem Chip integriert, können u. a. als direkter Geschwindigkeitsmesser von KFZ oder zur genauen Abstandsmessung (<1 mm bei mehreren Metern Entfernung) eingesetzt werden.[39] Diese werden auch zur berührungslosen Materialprüfung eingesetzt und ermöglichen zum Beispiel eine Inspektion bereits verpackter Bauteile. Bei für die Hochfrequenz transparenten Werkstoffen (zum Beispiel Keramikformteile, Textilien) kann ein Blick hindurch Störungen in dem Material erkennen lassen. Bei reflektierenden Werkstoffen ermöglichen diese Geräte eine Inspektion der Oberfläche und der Lage zusätzlich aufgebrachter Schichten.[40]
- Zur Untersuchung von unterirdischen geologischen Strukturen werden unter anderem Bohrlochsonden genutzt, bei denen durch Radarmessungen im Frequenzbereich von circa 10 MHz bis 100 MHz die elektrischen Eigenschaften im Umfeld des Bohrlochs ermittelt werden. Auch von der Erdoberfläche kann dieses Verfahren als sogenanntes Georadar (englisch Ground Penetrating Radar, GPR) verwendet werden. In beiden Anwendungen erreicht das FMCW-Radarverfahren trotz des geringen Schaltungsaufwandes eine sehr hohe Entfernungsauflösung.
- Mit einem FMCW-Radar vergleichsweise sehr geringer Leistung lässt sich auf (im Vergleich zu typischen Radarfrequenzen) geringen Trägerfrequenzen im Kurzwellenbereich zwischen 5 und 50 MHz mit der Bodenwelle ein Überhorizontradar (Over The Horizon – Surface Wave OTH–SW) realisieren, welches zur Beobachtung von Küstenabschnitten und als Wetterradar genutzt wird.[41]
- In Flugzeugen dienen FMCW-Radargeräte als Radarhöhenmesser (Radio-Altimeter) bei einem Landeanflug, wobei die Einschränkung auf wenige 100 Meter Reichweite nicht stört. Es ist jedoch nicht als Bodenfolgeradar nutzbar, da wegen der hohen Fluggeschwindigkeit ein Radar mit Blick voraus benötigt wird.
- Im nebenstehenden Bild des historischen Altimeters wurde eine sinusförmige Modulation benutzt. Diese entstand durch die Drehung des kapazitiven Abstimmelementes im Resonanzraum. Von dieser modulierten Sinuskurve wurde jedoch nur ein kleiner Teil benutzt (etwa ±30…45° um die 0° und die 180° herum). Dieser Teil der Sinuskurve ist relativ linear, auch wenn an die Genauigkeit noch keine großen Anforderungen gestellt werden konnten. Mit dieser Modulationsweise konnten einfach zu handhabende und robuste Geräte aufgebaut werden.
- In Fahrzeugen der Oberklasse werden weitreichende FMCW-Radargeräte auf 77 GHz als Sensor für Bremsassistent und Abstandsregeltempomat eingesetzt. Diese Geräte können eine digitale Diagrammformung in der Empfangsantenne für eine schnelle Änderung der Breite und der Hauptrichtung des Antennendiagramms bereitstellen. Zu diesem Zweck wird durch schnelle PIN-Diodenschalter das HF-Signal auf verschiedene Antennengruppen mit unterschiedlichen Abstrahlwinkeln verteilt.
- Unter der Bezeichnung Broadband Radar™ ist ein Navigationsradar für Schiffe und Boote im Handel. Dieses ist von der Messmethode her ein bildgebendes moduliertes Dauerstrichradar, obwohl es nach jeder 1 ms langen Periode der Frequenzänderung eine Pause von 5 ms einlegt. Das Auflösungsvermögen ist sehr viel besser als das von Impulsradargeräten, die mit Magnetrons ausgestattet sind. Zudem kann die Sendeleistung (im Vergleich zu den für diese Reichweite sonst notwendigen 4 Kilowatt Impulsleistung) auf nur 100 Milliwatt reduziert werden. Weil dieses Radar mit einem Frequenzhub von 65 MHz pro Millisekunde arbeitet, ist der Messfehler durch auftretende Dopplerfrequenzen relativ groß, was bei der maritimen Nutzung mit den üblichen kleinen Fahrgeschwindigkeiten wenig ins Gewicht fällt, einen Einsatz dieses Radars auf einem Flugplatz aber ausschließt. Bei den Start- und Landegeschwindigkeiten im Bereich von 200 bis 300 km/h würde der Messfehler schon bis zu mehreren Kilometern betragen: das Flugzeug wird nicht dort gesehen, wo es sich befindet, sondern dessen Echosignal kann sich unter Umständen außerhalb des Bildschirmmaßstabes befinden.
- In der Sicherheitstechnik werden FMCW-Radargeräte für einen Schutz empfindlicher militärischer oder ziviler Objekte vor konventioneller sowie asymmetrischer oder terroristischer Bedrohung eingesetzt.
- Zur Beobachtung von Grenzschichten in der Atmosphäre werden in der Meteorologie FMCW-Radargeräte eingesetzt, die den Flug von Insekten und die Höhe von Grenzschichten zwischen Luft unterschiedlicher Dichte dokumentieren.[42] Bei der Sendefrequenz von 2,9 GHz kann das Radar zwischen den Echosignalen der Insekten (verursacht durch Rayleigh-Streuung) und den Grenzen zwischen verschiedenen Luftschichten mit unterschiedlichem Brechungsindex (durch Turbulenzen und Verwirbelungen an der Grenzschicht gemäß der Bragg-Bedingung zu erkennen) unterscheiden. Die Höhen der Grenzschichten können bis in eine Höhe von 5 km bis auf 5 m genau bestimmt werden. Die Insekten dienen als Indikatoren für Luftbewegungen (Wind) in größeren Höhen.
- Selbst leistungsfähige militärische Impulsradargeräte wie das SMART-L von Thales sind in der Lage, in einen sogenannten „stillen Modus“ (englisch silent mode) umzuschalten und werden als Low Probability of Intercept Radar bezeichnet (schwer aufzuklärende Radargeräte). Sie können in diesem Modus mit einer extrem geringen Energieabstrahlung konfiguriert werden und sind von einem möglichen Gegner nur sehr schwer aufzuklären. Sie verwenden dann die Intrapulsmodulation, um auch eine Entfernungsbestimmung innerhalb des Sendeimpulses vornehmen zu können. Wenn die Dauer des Sendeimpulses größer wird als die Empfangszeit, dann sind die Bedingungen erfüllt, dieses Radar ebenfalls als FMCW-Radar zu bezeichnen. Gleichzeitig können in diesem Fall zur Entfernungsbestimmung statt der im Impulsradar üblichen Pulskompressionsverfahren als Funktion der Zeit (Zeitdomain) die wesentlich einfacheren und genaueren Berechnungen als Funktion der Frequenz (Frequenzdomain) genutzt werden.
- Wegen der außergewöhnlichen Genauigkeit in der Entfernungsbestimmung werden FMCW-Radargeräte (speziell stepped frequency-FMCW) für die Bahnverfolgung von Artilleriegeschossen in Echtzeit genutzt.[29]
- FMCW-Radar zur Kabelprüfung siehe auch Zeitbereichsreflektometrie.
Phasenkodiertes Dauerstrichradar

Der Oszillator eines phasenkodierten Dauerstrichradars erzeugt eine Festfrequenz, deren zeitlicher Verlauf in kurze Abschnitte gleicher Länge unterteilt wird. Innerhalb jedes Abschnittes ist die Phasenlage konstant, die Länge der Abschnitte wird durch die geforderte Entfernungsauflösung bestimmt. In unregelmäßigen Abständen wird zwischen die oft nur wenige Nanosekunden dauernden Abschnitte ein Phasensprung eingefügt. Die Phasenumschaltung erfolgt durch schnelle PIN-Diodenschalter, die eine kurze Umwegleitung in den Sendeweg schalten, so dass die Phase an der Antenne um 180° gedreht anliegt. Dieser PIN-Diodenschalter wird mit einer Digitalspannung gesteuert, die mit einem binären Code verknüpft ist, weshalb die Folge dieser Phasenänderungen einem Bitmuster entspricht. Eine weitere Möglichkeit zur Phasenmodulation ist die Verwendung eines I&Q-Vektormodulators. Dieser teilt das HF-signal in einem −3dB-Richtkoppler in zwei Teile auf, die um 90° zueinander phasenverschoben sind. Je eine Verstärkerstufe vollziehen bei den Teilsignalen eine weitere Phasendrehung um 180°. Danach erfolgt in jedem Teilpfad eine spannungsgesteuerte Dämpfung mit unterschiedlicher Höhe, bevor beide Teilsignale wieder mit einem −3dB-Richtkoppler zusammengefügt werden. Im Ergebnis ist das Ausgangssignal mit einer von der Größe der Steuerspannung abhängigen Phasenverschiebung behaftet.
Die Phasenlage des Sendesignals ist nun von einer Folge von Impulsen abhängig, deren Bitmuster zum Beispiel einem Barker-Code entsprechen kann. Dieser Barker-Code kann auch mehrfach ineinander verschachtelt sein. Innerhalb eines langen Zeitverlaufs, der durch die maximal zu erwartende Laufzeit der elektromagnetischen Welle vorgegeben wird, darf sich dieses Muster nicht wiederholen.[43] Ideal wäre es, dieses Bitmuster durch einen Zufallsgenerator zu erzeugen, aber auch pseudozufällige Bitfolgen sind praktisch möglich und erlauben eine einfache Auswerteschaltung, da das originale Sendesignal nicht mehr schrittweise verzögert werden muss, sondern dort, wo es benötigt wird, mit einem verzögerten Startzeitpunkt neu erstellt werden kann.
Erfolgt die Abwärtsmischung im Empfänger mit der unmodulierten Frequenz, erscheint am Ausgang des Mischers das Bitmuster als Impulsfolge. In der Vergangenheit wurde mit einer langen Laufzeitkette das gesendete Bitmuster zum Vergleich mit dem Empfangssignal schrittweise verzögert. Mittlerweile wird rechnergestützt mit der Sliding-Window-Methode das empfangene Bitmuster mit dem ausgesendeten Signal verglichen. Die Anzahl der verschobenen Bits bis zur Übereinstimmung von Sende- und Empfangssignal ist das Maß für die Entfernung, wodurch eine simultane Messung von Entfernung und Radialgeschwindigkeit ermöglicht wird, da die eventuell zu messende Dopplerfrequenz keinen Einfluss auf die Entfernungsbestimmung hat.
Gegenüber einem Impulsradar hat dieses Verfahren folgende Vorteile:
- Obwohl keine hohe Impulsleistung verwendet wird, lassen sich gleichwertige Ergebnisse mit einer sehr viel geringeren Dauerstrichleistung erreichen;
- Die geringe Leistung erschwert eine Aufklärung dieses Radars;
- Die Anlage kann durch Fremdsignale kaum gestört werden, da für eine Imitation das verwendete Bitmuster bekannt sein muss.
Rauschmoduliertes Dauerstrichradar

- Oben: Sendesignal eines rauschmodulierten Radars (zwischen den Impulsen besteht keine Sendepause)
- Mitte: empfangenes laufzeitverzögertes Rauschen (die roten Linien sind hier im Bild nur Sehhilfe, sie haben keine Funktion im Radar)
- Unten: Korrelierter laufzeitverzögerter Ausgangsimpuls
Zur Messung einer Entfernung mit einem Dauerstrichradar kann eine rauschmodulierte Amplituden- oder Phasenmodulation genutzt werden.[44] Für breitbandiges Radar kann hochfrequentes weißes Rauschen direkt leistungsverstärkt und gesendet werden. Die durch das Rauschen modulierten Impulse haben eine Länge von nur wenigen Nanosekunden bei einer Senderbandbreite von mehreren Gigahertz. Auch hier muss im Empfänger das gesendete Rauschsignal schrittweise verzögert werden und wird in einem Korrelator mit dem empfangenen Signal verglichen. Diese Radargeräte arbeiten meist auf Frequenzen oberhalb von 80 GHz und ermöglichen eine Entfernungsauflösung von wenigen Zentimetern. Eine Aufklärung oder Störung dieser Radargeräte ist nicht möglich, da ein zusätzliches Rauschen innerhalb des natürlichen Umgebungsrauschens nicht erkannt werden kann und für eine effektive Störung oder Täuschung das exakte Sendesignal bekannt sein muss.
Zum Empfang werden die reflektierten hochfrequenten Rauschsignale mittels eines hochstabilen lokalen Oszillators, der auf der Mittenfrequenz des Sendefrequenzbandes schwingt, herabgemischt. Das Ausgangssignal der Mischstufe wird verstärkt, mit dem verzögerten Sendesignal verglichen und in einem abgestimmten Empfänger, dem Korrelator, zu einem kurzen Ausgangsimpuls komprimiert, welcher in der Funktion dem Pulskompressionsfilter im Pulskompressionsverfahren ähnelt. Im Empfangssignal tritt zwar zusätzlich das natürliche Umgebungsrauschen auf, welches als Eigenrauschen ebenfalls dem Sendesignal überlagert wird. Dieses zusätzliche Rauschen wird durch den Vergleich mit dem Sendesignal statistisch auskorreliert. Die Impulsdauer des Ausgangsimpulses ist im Idealfall so lang wie die einzelnen Rauschimpulse des Senders, abhängig von der Senderbandbreite meist nur wenige Nanosekunden lang. Das Auflösungsvermögen dieses Radars liegt somit bei Rauschimpulsen von 1 ns Länge bei 15 cm – die Senderbandbreite muss in diesem Fall mindestens 1 GHz betragen. Die Genauigkeit der Messung der Laufzeit ist unabhängig vom Auflösungsvermögen und hängt davon ab, wie viele Schritte Verzögerung im Korrelator für einen einzelnen gesendeten Rauschimpuls vorgesehen beziehungsweise technisch realisierbar sind.
Die Weiterentwicklung dieses Verfahrens, speziell durch das Aussenden von nur vereinzelten Rauschimpulsen, führt zum Rauschradar[45] (wegen der großen Bandbreite auch UWB-Radar genannt). Da aber deren Sender während des Messvorganges nicht ununterbrochen arbeiten, werden diese Geräte den Impulsradargeräten zugeordnet.
Frequenzfreigaben
Es gibt hinsichtlich einer Frequenzfreigabe zwei grundsätzlich verschiedene Dauerstrichradaranwendungen. Eine Möglichkeit ist, das Radar innerhalb von abgeschirmten Behältern zu betreiben (zum Beispiel für Füllstandsmessungen), welche Eigenschaften eines Faradayschen Käfigs aufweisen und keine Abstrahlung nach außen zulassen. Für diese Geräte sind nur Bauartzulassungen nötig, in denen die Betriebsbedingungen festgelegt sind.
Alle anderen Radargeräte, die in den freien Raum abstrahlen, benötigen eine Frequenzfreigabe der Bundesnetzagentur. Diese legt in Verwaltungsvorschriften fest, welche Frequenzen oder welche Frequenzbänder durch wen wie genutzt werden dürfen.[46]
In den sogenannten ISM-Bändern Typ B sind beliebige Anwendungen ohne spezielle Frequenzfreigabe möglich. In solchen speziellen Frequenzbändern können somit auch Dauerstrichradaranwendungen genehmigungsfrei in Betrieb genommen werden. Für das ISM-Band von 24 … 24,25 GHz sind viele preisgünstige Transceiver verfügbar und können für den Aufbau von Bewegungsmeldern und Entfernungsmessgeräten genutzt werden. Oft werden ebenfalls Radartransceiver angeboten, die in anderen Frequenzbändern arbeiten. Diese sind meist für andere Kontinente (zum Beispiel USA) konstruiert und dürfen in Deutschland entweder gar nicht oder nur innerhalb oben genannter abgeschirmter Behälter in Betrieb genommen werden.
Literatur
- Shahan A. Hovanessian: Radar System Design and Analysis. Artech House, Dedham MA 1984, ISBN 0-89006-147-5.
- William K. Saunders: CW and FM RADAR. In: Merril I. Skolnik (Hrsg.): Radar Handbook. 2. Auflage. Mcgraw-Hill Professional, New York u. a. 1990, ISBN 0-07-057913-X, Chapter 14; ww.helitavia.com (PDF; 1,31 MB).
- Яков Д. Ширман: Теоретические основы радиолокации. Издательство „Советское Радио“, Moskau 1970.
- deutsche Übersetzung: J. D. Schirman u. a.: Theoretische Grundlagen der Funkortung. Militärverlag der DDR, Berlin 1977 (eine fachlich gute Übersetzung des Originals ausgeführt von Dozenten und Fachlehrern der ehemaligen Offiziershochschule der LSK/LV; Nachteil dieser Übersetzung: viele Fachbegriffe sind zwanghaft eingedeutscht und entsprechen nicht mehr dem heutigen Sprachgebrauch).
- Edgar Voges: Hochfrequenztechnik. Band 2: Leistungsröhren, Antennen und Funkübertragung, Funk- und Radartechnik. Hüthig, Heidelberg 1987, ISBN 3-7785-1270-6 (Kapitel 22.6 „CW- und FMCW-Radar“).
Weblinks
- Federation of American Scientists „Continuous Wave Radar“
- Radartutorial: „Dauerstrichradargeräte (CW-Radar)“
- Radartutorial: „Modulierte Dauerstrichradargeräte (FM-CW-Radar)“
Einzelnachweise
- David K. Barton, Sergey A. Leonov (Hrsg.): Radar Technology Encyclopedia. Artech House, Boston MA u. a. 1997, ISBN 0-89006-893-3, S. 340.
- Edgar Voges: Hochfrequenztechnik. Band 2. 1987, S. 348.
- Patent DE165546: Verfahren, um entfernte metallische Gegenstände einem Beobachter zu melden. Erfinder: Christian Hülsmeyer (dpma.de (PDF; 293 kB)).
- Patent DE169154: Verfahren zur Bestimmung der Entfernung von metallischen Gegenständen (Schiffen o. dgl.), deren Gegenwart durch das Verfahren nach Patent 165546 festgestellt wird. (radartutorial.eu (PDF; 230 kB)).
- Merrill I. Skolnik: Introduction of Radar Systems. McGraw-Hill Inc., New York NY u. a. 1962, S. 9, (Vorschau (Memento vom 3. Dezember 2012 im Internet Archive)).
- Edward V. Appleton, Miles A. F. Barnett: On Some Direct Evidence for Downward Atmospheric Reflection of Electric Rays. In: Proceedings of the Royal Society of London. Series A: Mathematical, Physical and Engineering Sciences. Bd. 109, Nr. 752, 1925, S. 621–641, doi:10.1098/rspa.1925.0149.
- Lloyd Espenschied, Russell C. Newhouse: A Terrain Clearance Indicator. In: The Bell System Technical Journal. Bd. 18, Nr. 1, 1939, S. 222–234, doi:10.1002/j.1538-7305.1939.tb00813.x.
- Peter C. Sandretto: The Long Quest. In: Transactions of the IRE Professional Group on Aeronautical and Navigational Electronics. Bd. ANE-1, Nr. 2, Juni 1954, S. 2, doi:10.1109/TPGAE.1954.5062382.
- F. J. Dallemand, J. Lichtenegger, R. K. Raney, R. Schumann et al.: Radar Imagery. Theory and Interpretation. Lecture Notes (= RSC Series. Nr. 67, ZDB-ID 19599-6). Food and Agriculture organization of the United Nations – Publications Division, Rom 1993, S. 8.
- Datenblatt eines Transceiver-IC von der Firma „Silicon Radar“, radartutorial.eu (PDF; 686 kB).
- Igor V. Komarov, Sergey M. Smolskiy, Fundamentals of Short-Range FM Radar. Artech House, Boston u. a. MA 2003, ISBN 1-58053-110-5 (eingeschränkte Vorschau in der Google-Buchsuche).
- Juergen H. Richter: High Resolution Tropospheric Radar Sounding. In: Radio Science. Band 4, Nr. 12, 1969, S. 1261–1268, doi:10.1029/RS004i012p01261.
- Donald E. Barrick: FM/CW radar signals and digital processing (= NOAA Technical Report ERL 283-WPL 26, ZDB-ID 60512-8). Environmental Research Laboratories, Boulder CO 1973, codar.com (PDF; 6,17 MB).
- R. B. Chadwick, K. P. Moran, R. G. Strauch, G. E. Morrison, W. C. Campbell: A New Radar for Measuring Winds. In: Bulletin of the American Meteorological Society. Band 57, Nr. 9, 1976, S. 1120–1125, doi:10.1175/1520-0477(1976)057<1120:ANRFMW>2.0.CO;2.
- Richard George Strauch: Theory and Applications of the FM-CW Doppler Radar. 1976, (University of Colorado Ph. D. thesis, 1976).
- Martin Schneider: Automotive Radar – Status and Trends. In: Wolfgang Menzel (Hrsg.): German Microwave Conference – GeMiC 2005 – Conference proceedings. University of Ulm, April 5–7, 2005. Universität Ulm, Ulm 2005, ISBN 3-00-015423-X, S. 144–147, uni-duisburg-essen.de (PDF; 355 kB).
- Produktkatalog 2010 der Firma ELVA-1 Millimeter Wave Division (DOK Ltd.), St. Petersburg, 193318 Russia, S. 8, elva1.com (PDF; 3,9 MB).
- Edgar Voges: Hochfrequenztechnik. Band 2. 1987, S. 351.
- Beispiel einer Computer-Schnittstelle für CW-Radar.
- Shahan A. Hovanessian: Radar System Design and Analysis. 1984, S. 84.
- typische Werte der Isolation siehe Datenblatt (Memento vom 4. März 2016 im Internet Archive) (PDF; 1,5 MB) für Zirkulatoren im X-Band.
- Phillip E. Pace: Detecting and classifying low probability of intercept radar. 2nd edition. Artech House, Boston MA u. a. 2009, ISBN 978-1-59693-234-0, Abschnitt: 4.4.3 Single Antenna Isolation Using a Reflected Power Cancerler., S. 97, (eingeschränkte Vorschau in der Google-Buchsuche).
- Herleitung der Formel auf dem Radartutorial.
- Tobias Wust: Blitzer und Geschwindigkeitsmessung. tredition GmbH, Hamburg 2009, ISBN 978-3-86850-021-9 (eingeschränkte Vorschau in der Google-Buchsuche).
- William K. Saunders: CW and FM RADAR. In: Merril I. Skolnik (Hrsg.): Radar Handbook. 2. Auflage. 1990, S. 14–18, Chapter 14 (PDF; 1,31 MB).
- zur Verwendung eines Speicheroszilloskops siehe diese Softwarelösung (Memento vom 19. November 2012 im Internet Archive), für Spektrumanalysator siehe Geräteaufbau im Institut für Hochfrequenztechnik und Elektronik (Memento vom 18. März 2014 im Internet Archive)
- J. D. Schirman u. a.: Theoretische Grundlagen der Funkortung. Militärverlag der DDR, Berlin 1977, S. 399.
- Broschüre (Memento vom 10. November 2013 im Internet Archive) (PDF) über das CW-Radar von BAE Systems (PDF 2,44 MByte)
- Vmax 100, Technische Daten und Funktionen eines Dopplerradars. (Memento vom 25. Februar 2014 im Internet Archive) (PDF) EUROtronic Technology GmbH für Geschwindigkeitsmessungen bei Sport.
- 60 Jahre Radarfalle, Artikel vom SWR.de
- Jens Muehlsteff, R. Pinter, G. Morren (Philips Res. Lab. Europe): Comparison of Respiration Rate Monitoring with a Low-cost Doppler-Radar Sensor and Inductive Thorax-Plethysmography. In: World Congress on Medical Physics and Biomedical Engineering. IFMBE Proceedings, Vol. 25/7, 2009, ISBN 978-3-642-03884-6, S. 768–771 (eingeschränkte Vorschau in der Google-Buchsuche).
- David J. Daniels: EM Detection of Concealed Targets. Wiley & Sons, Hoboken, New Jersey 2010, ISBN 978-0-470-12169-6, S. 229–231 (eingeschränkte Vorschau in der Google-Buchsuche).
- Shahan A. Hovanessian: Radar System Design and Analysis. 1984, S. 329–331.
- Entwicklungsbord ST200, Usermanual. (Memento vom 1. Mai 2015 im Internet Archive) (PDF; 3,5 MB) S. 19
- elektronische Strahlschwenkung mit FMCW-Radar realisiert im Blighter von Plextec Ltd.
- Michael J. Heim und Andreas Mayr: Auswahlkriterien für Radarsysteme zur Füllstandmessung in der Chemischen Industrie. Februar 2001, S. 3, endress.com (PDF; 586 kB)
- Norbert Thomann: Zuverlässigkeit neu definieren, Füllstandmessung mit geführtem Radar im Kondensatbehälter. (PDF) In: Verfahrenstechnik, 4/2011; abgerufen am 8. Juli 2017
- Radarchip vorgestellt vom Karlsruher Institut für Technologie
- Hochfrequenzsysteme – neue Wege in der Qualitätskontrolle. (PDF) Fraunhofer-Institut für Hochfrequenzphysik und Radartechnik; abgerufen am 3. Juli 2017
- WERA – Over the Horizon Radar. Abgerufen am 20. Juli 2012.
- Robert F. Contreras, Stephen J. Frasier: High-Resolution Observations of Insects in the Atmospheric Boundary Layer. In: Journal of Atmospheric and Oceanic Technology. Jahrgang 25, Ausgabe 12, Dezember 2008, S. 2176–2187, Manuskript vom 15. Mai 2008 (PDF).
- А. М. Педак: Справочник по основам радиолокационной техники. 1967, S. 25 (russ., dt. „Handbuch über die Grundlagen der Radargeräte“).
- А. М. Педак: Справочник по основам радиолокационной техники. 1967, S. 27 (russ., dt. „Handbuch über die Grundlagen der Radargeräte“).
- Markus Becker: Radar mit Tarnkappe. In: Spiegel Online vom 6. August 2006.
- Verwaltungsvorschrift für Frequenzzuteilungen für Radare und Navigationssysteme (VVRadNav), bundesnetzagentur.de (PDF)