Rotation eines Vektorfeldes
Als Rotation oder Rotor[1][2] bezeichnet man in der Vektoranalysis, einem Teilgebiet der Mathematik, einen bestimmten Differentialoperator, der einem Vektorfeld im dreidimensionalen euklidischen Raum mit Hilfe der Differentiation ein neues Vektorfeld zuordnet.
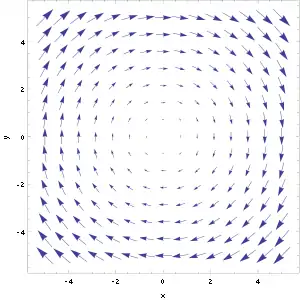
Die Rotation eines Strömungsfeldes gibt für jeden Ort das Doppelte der Winkelgeschwindigkeit an, mit der sich ein mitschwimmender Körper dreht („rotiert“). Dieser Zusammenhang ist namensgebend.

Es muss sich aber nicht immer um ein Geschwindigkeitsfeld und eine Drehbewegung handeln; beispielsweise betrifft das Induktionsgesetz die Rotation des elektrischen Feldes.
Ein Vektorfeld, dessen Rotation in einem Gebiet überall gleich null ist, nennt man wirbelfrei oder, insbesondere bei Kraftfeldern, konservativ. Ist das Gebiet einfach zusammenhängend, so ist das Vektorfeld genau dann der Gradient einer Funktion, wenn die Rotation des Vektorfeldes im betrachteten Gebiet gleich null ist.
Die Divergenz der Rotation eines Vektorfeldes ist gleich null. Umgekehrt ist in einfach zusammenhängenden Gebieten ein Feld, dessen Divergenz gleich null ist, die Rotation eines anderen Vektorfeldes.
Beispiele:
- Das Vektorfeld, das an jedem Ort die Windrichtung und -geschwindigkeit eines Wirbelsturms angibt, hat in der Umgebung des Auges (der Rotationsachse) eine von null verschiedene Rotation.
- Das Vektorfeld das an jedem Punkt einer rotierenden Scheibe die Geschwindigkeit angibt, hat an jedem Punkt dieselbe von null verschiedene Rotation. Die Rotation beträgt das Zweifache der Winkelgeschwindigkeit, Siehe Abbildung
- Das Kraftfeld, das an jedem Punkt die Gravitationskraft der Sonne auf ein Testteilchen angibt, ist wirbelfrei. Das Kraftfeld ist der negative Gradient der potentiellen Energie des Teilchens.


Definition der Rotation
Definition in kartesischen Koordinaten
Seien die kartesischen Koordinaten des dreidimensionalen euklidischen Raumes und , und die auf Einheitslänge normierten, zueinander senkrechten Basisvektoren, die an jedem Punkt in Richtung der zunehmenden Koordinaten zeigen.




Die Rotation eines dreidimensionalen, differenzierbaren Vektorfeldes

ist das dreidimensionale Vektorfeld

Man kann wie das Kreuzprodukt als formale Determinante einer Matrix auffassen, deren erste Spalte die kartesischen Basisvektoren enthält, die zweite die partiellen Ableitungen nach den kartesischen Koordinaten und die dritte die zu differenzierenden Komponentenfunktionen


Allerdings sind hier die verschiedenen Spalten nicht Vektoren desselben Vektorraumes.
Gibt man die Vektoren als Spaltenvektoren ihrer kartesischen Komponenten an, dann ist das formale Kreuzprodukt des Spaltenvektors der partiellen Ableitungen nach den kartesischen Koordinaten, des Nabla-Operators , mit dem Spaltenvektor der kartesischen Komponentenfunktionen


wo die Koordinaten nach dem üblichen Schema x → 1, y → 2 und z → 3 durchnummeriert wurden.
Koordinatenunabhängige Definition mit dem Nabla-Operator
Der Nabla-Operator ist auch in anderen Koordinatensystemen definiert und so kann mit ihm die Rotation koordinatenunabhängig durch

definiert werden. Mit dem Nabla-Operator können auch der Gradient- sowie die Divergenz eines Vektorfeldes dargestellt und Produktregeln hergeleitet werden.
Definition in Kugelkoordinaten
Schreibt man das Vektorfeld in Kugelkoordinaten als Linearkombination


der auf Einheitslänge normierten Vektoren

die an jedem Punkt in Richtung zunehmender -Koordinaten zeigen, so ist die Rotation


Definition in Zylinderkoordinaten
Gibt man das Vektorfeld in Zylinderkoordinaten als Linearkombination


der Vektoren

an, die auf Einheitslänge normiert an jedem Punkt in Richtung zunehmender -Koordinaten zeigen, so ist die Rotation


Rotation in zwei Dimensionen
Ein Vektorfeld im zweidimensionalen, euklidischen Raum kann als Vektorfeld

in drei Dimensionen aufgefasst werden, das nicht von der dritten Koordinate abhängt und dessen dritte Komponente verschwindet. Seine Rotation ist kein Vektorfeld dieser Art, sondern besteht gemäß

aus einer Komponente, die senkrecht zum Vektorfeld in drei Dimensionen ist. Definiert man in zwei Dimensionen die Rotation als den Differentialoperator

dann ist das Ergebnis ein Skalarfeld und kein Vektorfeld.
Eigenschaften
Koordinatenfreie Darstellung der Rotation als Volumenableitung
Mit Hilfe des Satzes von Stokes kann die Rotation, ähnlich wie die Divergenz (Quellendichte), als Volumenableitung dargestellt werden. Diese Darstellung hat den Vorteil, dass sie koordinatenunabhängig ist. Aus diesem Grund wird die Rotation im Bereich der Ingenieurwissenschaften oftmals direkt so definiert.
Ist ein Raumgebiet mit stückweise glattem Rand und dem Volumen , dann kann die Rotation des Vektorfelds im Punkt mittels der Volumenableitung durch






berechnet werden. Dabei bezeichnet das äußere vektorielle Flächenelement von wobei der nach außen zeigende Normaleneinheitsvektor und das skalare Flächenelement ist. Zur Grenzwertbildung wird das Raumgebiet auf den Punkt p zusammengezogen, sodass sein Inhalt gegen null geht, siehe auch #Integralsatz von Stokes weiter unten.[3]




Ersetzt man durch eine Strömungsgeschwindigkeit, erscheint die Rotation als Wirbeldichte. Ähnlich gebildete Synonyme existieren auch für die Divergenz (Quellendichte) und den Gradienten (Kraftdichte). Die Koordinatendarstellungen des vorigen Abschnitts ergeben sich aus der Volumenableitung, wenn man das jeweilige Volumenelement als Raumgebiet wählt.

Axialvektorfeld
Die Rotation eines Vektorfeldes ist ein Pseudovektorfeld. Ein Vektorfeld geht bei Spiegelung am Ursprung in sein Negatives am gespiegelten Ort über, die Rotation des Vektorfeldes ändert bei dieser Spiegelung ihr Vorzeichen nicht,

Rechenregeln
Die Rotation ist linear. Für alle Konstanten und differenzierbaren Vektorfelder und gilt



Die Rotation eines Vektorfeldes verschwindet genau dann, wenn es lokal ein Gradientenfeld ist und die Divergenz eines Vektorfeldes verschwindet genau dann, wenn es lokal die Rotation eines anderen Feldes ist:

Für differenzierbare Funktionen und Vektorfelder und gelten die Produktregeln


Darin ist der Nabla-Operator und in der letzten Formel bildet grad den Vektorgradient. Für die zweifache Anwendung der Rotation gilt

wo der Laplace-Operator ist. Für einen Vektor , der von einem Skalar abhängt, und dieser in 3D vom Ort, gilt die Kettenregel




Anwendungen
Zusammenhang zur Winkelgeschwindigkeit
Bei der Drehung eines starren Körpers um die -Achse mit konstanter Winkelgeschwindigkeit wächst der Drehwinkel gleichmäßig mit der Zeit an, und jeder Punkt durchläuft eine Bahn





Die Geschwindigkeit beträgt

Das Geschwindigkeitsfeld einer starren Drehung um die -Achse ist also, wie oben im Beispiel angegeben,

Seine Rotation ist die doppelte Winkelgeschwindigkeit

Veranschaulichung durch Drehmoment
In einem Flächenkraftdichte-Feld[4] , das jedem Körperoberflächenelement mit dem Inhalt unabhängig von seiner Ausrichtung die Kraft einprägt, erfährt eine Kugel mit dem Radius (und dem zugehörigen Volumeninhalt ) das Drehmoment




Vorausgesetzt ist, dass im Bereich der Kugel konstant ist. Die Gleichung folgt aus dem #Integralsatz von Stokes


mit und .


Sätze, in denen die Rotation eine Rolle spielt
Zerlegung in quellen- und wirbelfreien Teil
Zweifach stetig differenzierbare Vektorfelder , die mit ihren Ableitungen für große Abstände hinreichend rasch gegen null gehen, kann man eindeutig in einen wirbelfreien Teil und einen quellenfreien Teil zerlegen,




Dabei bezeichnen und den Divergenz- bzw. Gradient-Operator, wobei die Definition die in der Physik übliche Konvention ist. Mathematisch ist:




Diese Zerlegung ist Bestandteil des Helmholtz-Theorems.
Integralsatz von Stokes


Das Integral über eine Fläche über die Rotation eines Vektorfeldes ist nach dem klassischen Integralsatz von Stokes gleich dem Kurvenintegral über die Randkurve über



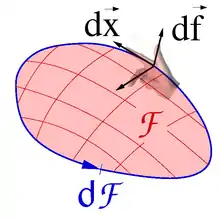
Durch das Doppelintegral wird links betont, dass man von einer zweidimensionalen Integration ausgeht. Auf der rechten Seite soll das Kreissymbol im Integralzeichen unterstreichen, dass es sich um ein Integral über einen geschlossenen Weg handelt. Die Orientierung entspricht dabei der Drei-Finger-Regel, siehe Abbildung rechts: die folgenden drei Vektoren, nämlich erstens der Vektor in Richtung der Flächennormalen, zweitens der Vektor in Tangentialrichtung der Kurve und drittens der vom Rand in die Fläche zeigenden Vektor, entsprechen Daumen, Zeigefinger und Mittelfinger der rechten Hand, das heißt, sie bilden ein Rechtssystem. Oft schreibt man indem man mit dem Normalenvektor die Richtung der Größe hervorhebt.




Der allgemeinere Satz von Stokes beinhaltet auch das Rotations-Theorem[5]

Darin ist ein stetig differenzierbares Vektorfeld, der nach außen gerichtete Normaleneinheitsvektor auf der geschlossenen Oberfläche des Volumens . Wenn das Volumen so klein wird, dass die Rotation in ihm näherungsweise konstant wird, folgt hieraus die #Koordinatenfreie Darstellung der Rotation als Volumenableitung.

Rotation von Tensoren zweiter Stufe
Die Rotation von Tensorfeldern zweiter Stufe wird mit der Identität[6]

definiert. Aus ihr ergibt sich
- .

In kartesischen Koordinaten bezüglich der Standardbasis ê1,2,3 schreibt sich die Rotation für das Tensorfeld :



Darin ist ⊗ das dyadische Produkt. Es wird aber auch die transponierte Version benutzt[7], die hieraus hervorgeht, indem die Komponenten gemäß vertauscht werden.


Im Zusammenhang mit Tensoren sind Klammern ein wichtiges Hilfsmittel, um die Reihenfolge der Anwendung und die Argumente der verschiedenen Operatoren klarzustellen, was auf das Ergebnis einen entscheidenden Einfluss hat. Meistens ist beispielsweise

weswegen die Ausdrücke und mehrdeutig sind.


Symmetrische Tensoren
Wenn der Tensor symmetrisch ist, mit , dann ist seine Rotation spurfrei:



denn Terme mit vertauschten Indizes und sind gleich groß, besitzen aber umgekehrtes Vorzeichen und heben sich daher in der Summe gegenseitig auf, oder verschwinden bei , siehe auch Spatprodukt.



Ableitungsregeln
Die Produktregel führt im Produkt mit einem Skalar , Vektoren und dem Tensor auf:




Darin bildet die Vektorinvariante, # das äußere Tensorprodukt und grad den Gradient. Ist T der Einheitstensor 1, dann liefert das bemerkenswerte Zusammenhänge:


In divergenzfreien Feldern ist also , was beim Poincaré-Lemma ausgenutzt wird.

Bei der Verknüpfung der Rotation mit anderen Differentialoperatoren entstehen unter Beteiligung eines Tensors teilweise ähnliche Formeln wie sie aus der Vektoranalysis bekannt sind:


oder mit den Nabla-Operator

Darin ist Δ = 𝜵2 der Laplace-Operator.
Einzelnachweise
- Walter Rogowski: Wie kann man sich vom Rotor (Wirbel) eines Vektorfeldes und vom Vektorpotentiale eine Anschauung verschaffen? In: Archiv für Elektrotechnik. Band 2, 1914, S. 234–245, doi:10.1007/BF01655798.
- Hans Karl Iben: Tensorrechnung. Mathematik für Naturwissenschaftler und Ingenieure. Vieweg+Teubner Verlag, Stuttgart, Leipzig 1999, ISBN 978-3-519-00246-8, doi:10.1007/978-3-322-84792-8.
- Bronstein, Semendjajew, Musiol, Mühlig: Taschenbuch der Mathematik. 8. Auflage. Harri Deutsch, Frankfurt 2012, ISBN 978-3-8171-2008-6 (Abschn. 13.2, Räumliche Differentialoperatoren).
- Formelsammlung Mechanik (Memento vom 10. August 2016 im Internet Archive)
- Altenbach (2012), S. 46.
- C. Truesdell: Festkörpermechanik II. In: S. Flügge (Hrsg.): Handbuch der Physik. Band VIa/2. Springer, 1972, ISBN 3-540-05535-5.
- Altenbach (2012), S. 43.
Literatur
- Adolf J. Schwab: Begriffswelt der Feldtheorie. Praxisnahe, anschauliche Einführung. Springer Verlag, 2002, ISBN 3-540-42018-5.
- Siegfried Großmann: Mathematischer Einführungskurs für die Physik. Teubner-Verlag, 2012, ISBN 978-3-8351-0254-5, doi:10.1007/978-3-8348-8347-6.
- Holm Altenbach: Kontinuumsmechanik. Springer, 2012, ISBN 978-3-642-24118-5.
Weblinks
- Wie „krümme“ ich Nabla und Delta? Herleitung des Nablaoperators für orthonormal krummlinige Koordinaten, auf matheplanet.com.