Symmetrischer Kreisel
Der symmetrische Kreisel ist in der Kreiseltheorie ein Kreisel mit zwei gleichen Hauptträgheitsmomenten[1]. Typische symmetrische Kreisel sind der Lagrange-Kreisel und viele Spielkreisel. Ein wichtiger Spezialfall sind homogene Rotationskörper, die bezüglich der auf der Figurenachse liegenden Bezugspunkte symmetrische Kreisel abgeben.
Symmetrische Kreisel werden vielfach angewendet bei der Drallstabilisierung von Schiffen (Schiffskreisel), Raumflugkörpern, Kreiselinstrumenten und Trägheitsnavigationssystemen und sind Gegenstand in der Astronomie und Ballistik.
Allgemeines
Jeder Starrkörper besitzt drei Hauptträgheitsmomente und drei dazugehörige Hauptträgheitsachsen oder kurz Hauptachsen, die sich aus der Lösung des Eigenwertproblems des Trägheitstensors ermitteln.
- Ein Kreisel mit drei gleichen Hauptträgheitsmomenten ist ein spezieller symmetrischer Kreisel und wird Kugel- oder sphärischer Kreisel genannt.
- Ein Kreisel mit drei verschiedenen Hauptträgheitsmomenten ist ein unsymmetrischer Kreisel.
Die für die Drehung um einen Fixpunkt oder den Massenmittelpunkt maßgeblichen Bewegungsgleichungen sind die Euler'schen Kreiselgleichungen oder für den schweren Kreisel die Euler-Poisson-Gleichungen.
Die Figurenachse ê3 ist beim symmetrischen Kreisel seine Symmetrieachse, bezüglich der er das dritte oder axiale Hauptträgheitsmoment besitzt. Um diese Achse ist das Trägheitsellipsoid rotationssymmetrisch. Die Hauptachsen ê1,2 mit den beiden übereinstimmenden äquatorialen Hauptträgheitsmomenten sind senkrecht zur Figurenachse in der Äquatorebene und dort beliebig orientiert. Es werden zwei Achsen ausgewählt, sodass die Hauptachsen ê1,2,3 ein rechtshändiges Orthonormalsystem bilden. Abhängig davon, ob das axiale Hauptträgheitsmoment größer oder kleiner als das äquatoriale ist, wird der Kreisel abgeplattet oder gestreckt genannt.[2]
Die Symmetrie verlangt nicht, dass der Kreiselkörper irgendwie im geometrischen Sinn symmetrisch wäre[3]. Insbesondere hängt die Symmetrie nach dem Steinerʹschen Satz vom Bezugspunkt ab; ein Kreisel kann daher bezüglich eines Punktes ein symmetrischer und bezüglich eines anderen Punktes ein unsymmetrischer Kreisel sein.
Die Symmetrie des Kreisels ist unabhängig von der Lage des Massenmittelpunkts. So sind der Kowalewskaja-Kreisel und der Gorjatschew-Tschaplygin-Kreisel, jeweils mit einem abseits der Figurenachse gelegenen Massenmittelpunkt, trotzdem symmetrische Kreisel.
Hauptträgheitsmomente
Der symmetrische Kreisel hat ein doppeltes, äquatoriales Hauptträgheitsmoment A und ein drittes, axiales C. Bei einem Starrkörper erfüllen die Hauptträgheitsmomente die Dreiecksungleichungen
- A + C > A und A + A > C
siehe Trägheitsmoment. Während die erste Ungleichung immer zutrifft, bedeutet die zweite 2A > C oder A > C/2. Dann kann es einen symmetrischen Kreisel mit den Hauptträgheitsmomenten A und C geben.
Gyroskopische oder Drallstabilisierung
Eine der technisch wertvollsten Eigenschaften von symmetrischen Kreiseln ist die Möglichkeit, mit ihnen Körper in ihrer räumlichen Ausrichtung zu stabilisieren. Dies wird bei Schiffen, Raumflugkörpern und Geschossen ausgenutzt. Die Drallstabilisierung basiert auf Kreiselwirkungen.
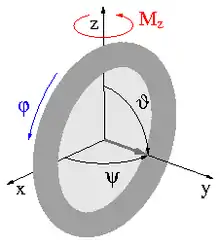
Wirkt auf das um die y-Achse rotierende Schwungrad im Bild beispielsweise ein nicht zu großes Moment Mz senkrecht zur frei beweglichen Drehachse, dann beginnt das Schwungrad nicht um z zu drehen, sondern führt eine Schwingung um z aus mit der Schwingungsgleichung

Darin ist L der axiale Drehimpuls um die Figurenachse. Die Schwingungsgleichung ist eine Näherung, die nur bei kleiner Auslenkung ψ gültig ist.
Für die stabilisierende Kreiselwirkung ist dabei die freie Drehungsmöglichkeit der Figurenachse um die äquatorialen Achsen entscheidend. Wird die Drehachse durch Lager an die xy-Ebene gebunden, dann können die Momente der Trägheitskräfte nicht ihr Potenzial entfalten und es tritt keine Drallstabilisierung auf[4].
In einem komplizierteren Mechanismus ist eine Drallstabilisierung allerdings nicht immer möglich. William Thomson, 1. Baron Kelvin und Peter Guthrie Tait konnten zeigen,[5]
- dass nur Systeme mit einer geraden Anzahl von labilen Freiheitsgraden gyroskopisch stabilisiert werden können, wobei indifferente Freiheitsgrade im Allgemeinen zu den labilen zu zählen sind,
- dass wenn keine Dämpfung vorhanden ist, die Stabilisierung einer geraden Anzahl von labilen Freiheitsgraden stets erzwungen werden kann und
- dass bei vorhandener Dämpfung gyroskopische Stabilisierung nur mit Hilfe künstlich angefachter Freiheitsgrade möglich ist.
Von den hier angesprochenen Freiheitsgraden sind die Drehwinkel um die Figurenachse (genauer die zyklischen Koordinaten) der Kreisel ausgenommen.
Winkelgeschwindigkeit und Drehimpuls
Beim symmetrischen Kreisel kann die Winkelgeschwindigkeit vorteilhaft mit dem Drehimpuls ausgedrückt werden[6]:

Hier bezeichnen
- ê1,2,3 die Hauptachsen,
- die Winkelgeschwindigkeit,
- p, q, r = ω1,2,3 die Winkelgeschwindigkeiten im Hauptachsensystem,
- A, C die Hauptträgheitsmomente in 1-/2- bzw. 3-Richtung,
- den Drehimpuls,
- den Drehimpuls in 3-Richtung und im Folgenden
- „ד das Kreuzprodukt und „·“ das Skalarprodukt.



Daraus ist ersichtlich, dass beim symmetrischen Kreisel die Winkelgeschwindigkeit, der Drehimpuls und die Figurenachse immer komplanar sind. Aus dem Drallsatz ergibt sich weiters:

Darin bildet die relative Zeitableitung im Hauptachsensystem. Wenn das äußere Moment keine Komponente in Richtung der Figurenachse hat, was beim symmetrischen Euler-Kreisel, beim Lagrange-Kreisel und bei der regulären Präzession um die Lotrichtung der Fall ist, dann ist der Drehimpuls um die Figurenachse zeitlich konstant.


Die aus der ersten Gleichungszeile folgenden Euler’schen Kreiselgleichungen reduzieren sich auf eine einzige Differentialgleichung

worin f und g bekannte Funktionen der Zeit t, wenn die Drehmomente M1,2,3 im Hauptachsensystem bekannte Funktionen der Zeit sind, und p die Winkelgeschwindigkeit um eine Hauptachse ist. Die Differentialgleichung verkürzt sich weiter auf die integrable Form

wenn die Zeit durch die neue unabhängige Variable substituiert wird.[7]

Reguläre Präzession um die Lotrichtung
Der symmetrische Kreisel führt wie in der Animation in Abb. 2 eine reguläre Präzession um die Lotrichtung aus, wenn er mit jeweils konstanter Winkelgeschwindigkeit um eine raumfeste Präzessionsachse und eine körperfeste Achse dreht, die einen gleichbleibenden Winkel einschließen. Die Kreiselwirkung des axialen Drehimpulses ist dessen Geschwindigkeit entgegen und horizontal ausgerichtet. Diese Kreiselwirkung kann beim schweren Kreisel nur dann vom horizontalen Drehmoment der lotrechten Gewichtskraft dynamisch ausgeglichen werden, wenn
- der Massenmittelpunkt auf der Figurenachse liegt oder
- der Kreisel keine Eigendrehung um die Figurenachse aufweist und der Massenmittelpunkt in der von der Figurenachse und der Lotrichtung aufgespannten Präzessionsebene liegt.
Die Nutation des symmetrischen Euler-Kreisels kann als momentenfreier Spezialfall der ersten Möglichkeit aufgefasst werden, wenn die Vertikale parallel zum Drehimpuls ausgerichtet wird. Der zweite Fall stellt eine Staude-Drehung dar.
Staude-Drehungen
Wenn der Massenmittelpunkt nicht auf der Figurenachse ist, kann der symmetrische Kreisel dann eine der regulären Präzession vergleichbare regelmäßige Bewegung ausführen, wenn der Massenmittelpunkt immer noch in der Präzessionsebene liegt. Das ist beispielsweise beim Kowalewskaja-Kreisel der Fall, wenn er, wie in der Animation in Abb. 3, Karussell-Bewegungen ausführt, siehe Hauptartikel.
Weblinks
- K. Lüders, R. O. Pohl, G. Beuermann, K. Samwer: Präzession eines rotierenden Rades. (MP4) Institut für den wissenschaftlichen Film (IWF), 2003, abgerufen am 13. April 2018 (Film über ein mit horizontaler Drehachse präzedierendes Rad.).
- K. Lüders, R. O. Pohl, G. Beuermann, K. Samwer: Kreiselkompass. (MP4) Institut für den wissenschaftlichen Film (IWF), 2003, abgerufen am 6. Dezember 2019 (Das Prinzip des Kreiselkompasses wird mit Hilfe eines Speichenrades auf einem Drehstuhl demonstriert.).
- K. Lüders, R. O. Pohl, G. Beuermann, K. Samwer: Stabilisierung mit Hilfe eines Kreisels ("Einschienenbahn"). (MP4) Institut für den wissenschaftlichen Film (IWF), 2003, abgerufen am 6. Dezember 2019 (Das Phänomen der Präzession wird ausgenutzt, um ein stark kopflastiges System am Umkippen zu hindern.).
Einzelnachweise
- Magnus (1971), S. 20, Grammel (1920), S. 39, siehe Literatur.
- Magnus (1971), S. 20.
- Magnus (1971), S. 20 und 126. Richard Grammel forderte 21 Jahre vor Magnus noch, dass beim symmetrischen schweren Kreisel der Massenmittelpunkt auf der Figurenachse liege, siehe Grammel (1920), S. 88 oder Grammel (1950), S. 78.
- Klein und Sommerfeld (1910), S. 767f.
- Grammel (1950), S. 261 f.
- Rauch-Wojciechowski, Sköldstam und Glad (2005), S. 335.
- Leimanis (1965), S. 7.
Literatur
- K. Magnus: Kreisel: Theorie und Anwendungen. Springer, 1971, ISBN 978-3-642-52163-8, S. 20 (eingeschränkte Vorschau in der Google-Buchsuche [abgerufen am 20. Februar 2018]).
- R. Grammel: Der Kreisel. Theorie des Kreisels. 2. überarb. Auflage. Band 1.. Springer, Berlin, Göttingen, Heidelberg 1950, DNB 451641299.
- R. Grammel: Der Kreisel. Seine Theorie und seine Anwendungen. Vieweg Verlag, Braunschweig 1920, DNB 451641280, S. 39 (archive.org – "Schwung" bedeutet Drehimpuls, "Drehstoß" Drehmoment und "Drehwucht" Rotationsenergie).
- F. Klein, A. Sommerfeld: Theorie des Kreisels. Die technischen Anwendungen der Kreiseltheorie. Heft IV. Teubner, Leipzig 1910, S. 767 (archive.org [abgerufen am 21. Oktober 2017]).
- S. Rauch-Wojciechowski, M. Sköldstam, T. Glad: Mathematical analysis of the tippe top. In: Regular and Chaotic Dynamics. Band 10, Nr. 4. Springer Nature, 2005, ISSN 1468-4845, S. 333–362, doi:10.1070/RD2005v010n04ABEH000319 (turpion.org [abgerufen am 15. Dezember 2018]).