Gyroskopische Stabilisierung
Die gyroskopische Stabilisierung oder Drallstabilisierung ist in der Kreiseltheorie ein Effekt, mit dem an sich labile Systeme durch eingebaute zyklische Mechanismen in ihrer räumlichen Ausrichtung stabilisiert werden[1]. Bei den zyklischen Mechanismen handelt es sich meist um symmetrische Kreisel und hiervon soll nur die Rede sein. Im Alltag ist der Effekt erfahrbar bei rasch drehenden Spielkreiseln, die gegen Störungen bemerkenswert unempfindlich sind, oder einem in den Händen gehaltenen, schwungvoll rotierenden Rad, das der Richtungsänderung seiner Achse Widerstand entgegensetzt.
Die Theorie der gyroskopischen Stabilisierung befasst sich mit der Frage, unter welchen Umständen eine Stabilisierung gelingt, was keineswegs immer möglich ist. William Thomson, 1. Baron Kelvin und Peter Guthrie Tait konnten zeigen,[2]
- dass nur Systeme mit einer geraden Anzahl von labilen Freiheitsgraden gyroskopisch stabilisiert werden können, wobei indifferente Freiheitsgrade im Allgemeinen zu den labilen zu zählen sind,
- dass wenn keine Dämpfung vorhanden ist, die Stabilisierung einer geraden Anzahl von labilen Freiheitsgraden stets erzwungen werden kann und
- dass bei vorhandener Dämpfung gyroskopische Stabilisierung nur mit Hilfe künstlich angefachter Freiheitsgrade möglich ist.
Von den hier angesprochenen Freiheitsgraden sind die Drehwinkel um die Figurenachse (genauer die zyklischen Koordinaten) der Kreisel ausgenommen.
Anwendung findet die gyroskopische Stabilisierung in Schiffen (Schiffskreisel), Raumflugkörpern, Kreiselinstrumenten und Trägheitsnavigationssystemen sowie in der Ballistik, siehe #Anwendungen.
Stabilisierung eines Schwungrads
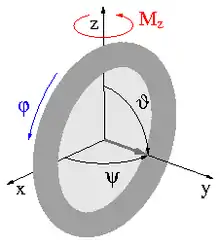
Die gyroskopische Stabilisierung tritt beim Schwungrad auf, bei dem der Massenmittelpunkt im Koordinatenursprung drehbar fixiert ist und die Figurenachse (anfänglich in y-Richtung) frei ist, sodass sie ihre Richtung beliebig ändern kann, siehe Bild. Auf dieses ansonsten kräftefreie Schwungrad wirke eine kurze Zeit in z-Richtung ein konstantes Moment Mz, das das Schwungrad in Drehung um z versetzt. Diese Drehung macht sich am ruhenden und rotierenden Schwungrad jedoch unterschiedlich bemerkbar:
- Ruht das Schwungrad, dann beginnt es durch das Moment um z zu rotieren. Nachdem das Moment aufgehört hat zu wirken, verharrt das Schwungrad in der Drehung um z, der Drehwinkel ψ der Figurenachse um z nimmt monoton zu und ist unbeschränkt. Die Winkelgeschwindigkeit und der Drehimpuls haben nur eine Komponente und die weist in z-Richtung. Der Neigungswinkel ϑ zwischen Figurenachse und Momentenachse z bleibt unverändert.
- Rotiert das Schwungrad anfänglich hinreichend schnell um die Figurenachse, dann zeigt sich ein anderes Bild. Zwar führt das Moment auch hier zu einer linearen Zunahme des Drehimpulses in z-Richtung, aber weil sich diese Komponente zum anfänglichen (als viel größer angenommenen) Drehimpuls in y-Richtung vektoriell addiert, der Drehimpuls also weiter vor allem in y-Richtung orientiert ist, und Drehimpuls und Winkelgeschwindigkeit einen spitzen Winkel einschließen (siehe Trägheitsellipsoid), dreht das Schwungrad weiter vor allem um die y-Achse. Dadurch bleibt der Drehwinkel ψ der Figurenachse um z beschränkt. Nach der Regel vom gleichsinnigen Parallelismus versucht der Kreisel seine Drehung dem angreifenden Moment anzugleichen, wodurch der Winkel ϑ abnimmt.
Ursache für den geringen Einfluss des Moments auf die Drehung des rotierenden Schwungrads um z sind Trägheitskräfte, die, wie im Folgenden geschildert, Gegenmomente aufbauen. Es zeigt sich, dass die Figurenachse unter dem Moment eine Schwingung um z ausführt:

Darin ist L der anfängliche axiale Drehimpuls um die Figurenachse und A das äquatoriale Hauptträgheitsmoment. Die Schwingungsgleichung ist eine Näherung, die nur bei kleiner Auslenkung ψ gültig ist. Aus kann mit ψ auch ϑ berechnet werden.

Für die Stabilisierung ist dabei die freie Drehungsmöglichkeit der Figurenachse um die äquatorialen Achsen entscheidend. Wird die Drehachse durch Lager an die xy-Ebene gebunden, können die Momente der Trägheitskräfte nicht ihr Potenzial entfalten und es tritt keine Drallstabilisierung auf[3].
Für die Herleitung der Schwingungsgleichung wird der übliche Fall voraus gesetzt, dass das Schwungrad ein oblater Kreisel ist, sein Trägheitsmoment C um die Figurenachse also größer ist als die äquatorialen Trägheitsmomente A. Andernfalls wären die Kreiselwirkungen in x-Richtung umgekehrt orientiert. Anders als im Bild soll der Winkel ψ von der y-Achse aus zählen und es wird der vom Drallsatz bekannte Zusammenhang M = L ω benutzt, demgemäß ein Moment M zur Drehgeschwindigkeit ω eines zu ihm senkrechten Drehimpulses L führt und umgekehrt eine solche Drehung ein Moment hervor ruft.
- Das kleine Moment Mz dreht das Schwungrad mit Drehimpuls L in y-Richtung zunächst (langsam) um die z-Achse und der Winkel ψ zur Figurenachse nimmt gemäß der Beschleunigungsgleichung zu. Der Beschleunigungsterm ist eine Kreiselwirkung in -z-Richtung, die sich aus Euler-Kräften speist.
- So bekommt die Winkelgeschwindigkeit eine kleine Komponente in z-Richtung und die Neigung ϑ der Drehachse gegenüber der Vertikalen verringert sich entsprechend . Diese Winkelbeschleunigung um x zieht Euler-Kräfte nach sich, die in Summe eine Kreiselwirkung in -x-Richtung hervorbringen.
- In gleicher Weise wie das Moment Mz die Kreiselwirkung in -x-Richtung hervor ruft, so entsteht durch letztere eine weitere Kreiselwirkung in -z-Richtung, die der Beschleunigungsgleichung im ersten Schritt hinzu zu fügen ist: , was auf obige Schwingungsgleichung führt.
- Ganz analog wie das Moment Mz eine entgegengesetzte Kreiselwirkung auslöst, besitzt auch die Kreiselwirkung in -x-Richtung eine Widersacherin in +x-Richtung, die sich aus den Zentrifugalkräften im Schwungrad speist und die ebenfalls zur Kreiselwirkung in -z-Richtung beiträgt.





Während sich die Kreiselwirkungen in -z-Richtung ( und ) genau zu Mz summieren, löschen sich die Kreiselwirkungen in x- und y-Richtung genau aus. Das Moment der Euler-Kräfte ist dort antiparallel zum Moment der Zentrifugalkräfte. Auf diese Weise bleiben die Drehimpulse in x- und y-Richtung gegenüber dem Anfangszustand unverändert.

Kelvin-Tait’sche Gleichungen
Indem die speziellen Eigenschaften gyroskopischer Mechanismen ausgenutzt werden, resultieren aus den Lagrange-Gleichungen die Kelvin-Tait’schen Gleichungen, mit denen die Wirkung eingebauter und unsichtbar laufender Kreisel analytisch behandelt wird.
Bei Kreiseln gibt es häufig Koordinaten φk, die in der Bewegungsenergie nicht selber, sondern nur mit ihrer Zeitableitung vorkommen. In der Gesamtenergie

obigen Schwungrads, siehe Herleitung der Bewegungsfunktion des Lagrange-Kreisels mit c0 = 0, sind φ und ψ solche Variablen, wobei φ zudem durch das äußere Moment Mz nicht merklich beeinflusst wird, solange der Neigungswinkel ϑ nahezu ein rechter ist.
Im Lagrange-Formalismus werden die φk zyklische Koordinaten genannt und sind die zugehörigen generalisierten Kräfte Qk, wie beim Drehwinkel φ des Schwungrads oben, gleich Null, handelt es sich um ein zyklisches System. Dort sind die generalisierten Impulse Φk zu den zyklischen Koordinaten φk konstant (Im Fall des Schwungrads ist der axiale Drehimpuls L diese Konstante.) Indem in den Lagrange-Gleichungen die zyklischen Koordinaten zugunsten ihrer konstanten generalisierten Impulse eliminiert werden – eine Idee, die auf Edward Routh zurückgeht – entstehen die Kelvin-Tait’schen Gleichungen[4]

Sie sind für den Spezialfall zweier zyklischer φk und dreier weiterer, nicht zyklischer, generalisierter Koordinaten qk angeschrieben, die aus den drei Gleichungen berechnet werden können. Die Funktionen F1,2 sind zusätzlich und die Terme Gkl ausschließlich von den q1,2,3 abhängig, was in der Gleichung aus Platzgründen unterschlagen wurde. Die gyroskopischen Terme Gkl werden durch die Antisymmetrie
- Gkl = -Glk und Gll = 0, k,l=1,2,3
charakterisiert. In den Kelvin-Tait’schen Gleichungen kommen die zyklischen Koordinaten φk nicht mehr vor; sie werden deshalb verborgene oder kinosthenische Koordinaten genannt in Abgrenzung zu den sichtbaren Koordinaten qk. Sind aus den Kelvin-Tait’schen Gleichungen die sichtbaren Koordinaten berechnet, können anschließend die verborgenen ermittelt werden. Erweisen sich diese ebenfalls als Festwerte, so heißt das System isozyklisch[1].
An den Gleichungen kann die dreifache Wirkung eingebauter und unsichtbar laufender Kreisel abgelesen werden:[5]
- Die Trägheit des Systems ist scheinbar verändert, denn die kinetische Energie ist durch den Wert F1 ersetzt, zu dem in der Regel vergrößerte Trägheiten beitragen.
- Zu der "sichtbaren" generalisierten Kraft Qk tritt eine scheinbare Kraft hinzu.
- Die gyroskopischen Glieder Gkl bedeuten eine durch die verborgenen Bewegungen erzeugte gyroskopische Kopplung zwischen den sichtbaren Koordinaten. Sie erscheinen als gyroskopische Kräfte der verborgenen Kreisel, hervor gerufen durch Kreiselwirkungen, die im Ganzen keine Leistung erbringen.

Voraussetzungen für die gyroskopische Stabilisierung
In diesem und dem folgenden Abschnitt werden die drei eingangs genannten Sätze von Kelvin und Tait analytisch begründet.
Bei einem System mit n stabilen oder labilen Freiheitsgraden qk können in Abwesenheit von gyroskopischen Kopplungen die Bewegungsgleichungen bei kleinen Störungen eines Gleichgewichtszustands in der Form

geschrieben werden[1]. Darin sind
- Bk die stets positiven "Trägheitskoeffizienten",
- Kk die meist positiven Dämpfungsziffern und
- Hk die "Rückstellkoeffizienten".
Die Lösungen dieser Schwingungsgleichungen lauten

Darin ist ex die e-Funktion und t die Zeit. Bei negativem Hk ist jedenfalls eines der σ1,2 positiv, was ein unablässiges Anwachsen von qk, also Labilität zur Folge hat. Bei Hk > 0 liegt hingegen Stabilität vor mit aperiodisch oder schwingend abklingendem qk.
Bei einem gyroskopisch gekoppelten System resultieren aus den Kelvin-Tait’schen Gleichungen gekoppelte Schwingungsgleichungen

Mit obigem Lösungsansatz resultieren n lineare Gleichungen für die n Koeffizienten bk. Damit diese nicht alle Null sind, muss die Determinante des Gleichungssystems Null sein, was auf eine Gleichung der Ordnung 2n in σ führt:


mit

Der ursprüngliche Gleichgewichtszustand ist genau dann stabil, wenn keine Wurzel σ einen positiven Realteil besitzt, denn ein positiver Realteil würde ein dauerndes Anwachsen mindestens einer Koordinate qk und mithin Instabilität bedeuten[6].
Stabilität liegt demnach genau dann vor, wenn das Polynom ein Hurwitzpolynom ist. Der erste Koeffizient a0 ist jedenfalls positiv. Mit dem Hurwitz-Kriterium kann entschieden werden, ob alle Nullstellen σ negative reelle Teile besitzen, und es zeigt sich, dass a2n auch positiv sein muss. Das ist nur möglich wenn höchstens eine gerade Anzahl der Hk negativ ist, also höchstens eine gerade Anzahl der qk instabil ist, was den ersten der aufgeführten Sätze begründet. Ob die Stabilisierung bei a2n > 0 tatsächlich gelingen kann, hängt von den weiteren Hurwitz’schen Bedingungen ab.
Bei einem System mit zwei Freiheitsgraden können diese relativ leicht aufgeschrieben und erfüllt werden und so die beiden anderen eingangs aufgeführten Sätze plausibilisiert werden.
Systeme mit zwei sichtbaren Freiheitsgraden
Systeme mit zwei sichtbaren Freiheitsgraden kommen in der Technik häufig vor und deshalb werden diese hier ausführlich dargestellt. Bei einem solchen System entsteht ein Polynom vierten Grades

mit der Hurwitz-Matrix

woraus mit a0 > 0 die Hurwitz-Kriterien

folgen. Die senkrechten Striche |…| bezeichnen hier die Determinante der eingeschlossenen Matrix. Damit all diese Bedingungen eingehalten werden, ist

notwendig und hinreichend. Darin ist G = G12 das Koppelglied.
In Abwesenheit von Dämpfung (K1,2 = 0) ist ein System mit einer geraden Anzahl von labilen Freiheitsgraden (1. Satz, a4 > 0) im Einklang mit dem zweiten Satz durch einen genügend starken Kreisel – also großem G – jedenfalls stabilisierbar.
Bei instabilen Freiheitsgraden (H1,2 < 0) gibt es zur Erfüllung der Hurwitz-Kriterien die Möglichkeiten[7]

Bei einem gedämpften Freiheitsgrad, beispielsweise in a) mit K1 > 0, muss der andere Freiheitsgrad künstlich angefacht werden, sodass in a) K2 < 0 ist, und muss außerdem die entsprechende, vierte Ungleichung (hier im Fall a) erfüllbar sein. Dieser Sachverhalt konnte von Kelvin und Tait zur dritten Bedingung verallgemeinert werden.
Anwendungen
Die Drallstabilisierung wird von Richard Grammel (1920), siehe #Literatur und worauf sich auch die Seitenangaben beziehen, in folgenden Systemen diskutiert:
- Eigenschwingungen von Flugzeugen (S. 208)
- Schleudernde Scheiben (S. 231)
- Elastische Bindungen bei Kreiseln (z. B. Kardanische Aufhängung, die sich elastisch verformt) (S. 243)
- Auf der Erdoberfläche an Fäden aufgehängtes Schwungrad (S. 252)
- Einkreiselkompass (S. 258)
- Mehrkreiselkompass (S. 269)
- Querstabilisierung beim Flugzeugkreisel (S. 290)
- Stützkreisel im Howell Torpedo[8] (S. 312)
- Einschienenbahn insbesondere die Einschienenbahn nach Brennan (S. 318)
Die gyroskopische Stabilisierung wird zudem angewendet
- in der Raumfahrt, siehe Stabilisierung (Raumfahrt) und beispielsweise Low-Density Supersonic Decelerator,
- in Kreiselinstrumenten, siehe beispielsweise Künstlicher Horizont.
- in der Ballistik insbesondere Außenballistik, siehe Geschossstabilisierung, die beispielsweise auch beim Speerwurf ausgenutzt werden kann.
Weblinks
- K. Lüders, R. O. Pohl, G. Beuermann, K. Samwer: Stabilisierung mit Hilfe eines Kreisels ("Einschienenbahn"). (MP4) Institut für den wissenschaftlichen Film (IWF), 2003, abgerufen am 23. November 2019.
- K. Lüders, R. O. Pohl, G. Beuermann, K. Samwer: Kreiselkompass. (MP4) Institut für den wissenschaftlichen Film (IWF), 2003, abgerufen am 24. November 2019.
Einzelnachweise
- Grammel (1950), S. 258.
- Grammel (1950), S. 261 f.
- F. Klein, A. Sommerfeld: Theorie des Kreisels. Die technischen Anwendungen der Kreiseltheorie. Heft IV. Teubner, Leipzig 1910, S. 767 f. (archive.org [abgerufen am 21. Oktober 2017]).
- Grammel (1950), S. 253ff. insbesondere S. 257.
- Grammel (1950), S. 257 f.
- Grammel (1950), S. 259.
- Grammel (1950), S. 262.
- Howell torpedo. Wikipedia, abgerufen am 27. Oktober 2019 (englisch).
Literatur
- R. Grammel: Der Kreisel. Theorie des Kreisels. 2. überarb. Auflage. Band 1.. Springer, Berlin, Göttingen, Heidelberg 1950, DNB 451641299, S. 258 ff.
- R. Grammel: Der Kreisel. Seine Theorie und seine Anwendungen. Vieweg Verlag, Braunschweig 1920, DNB 573533210 (archive.org – "Schwung" bedeutet Drehimpuls, "Drehstoß" Drehmoment und "Drehwucht" Rotationsenergie.).