Orthotropie
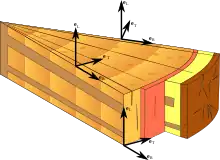
Die Orthotropie (von griechisch ορθός orthos „korrekt, senkrecht, gerade stehend“ und τρόπος tropos „Weg, Art und Weise“) ist eine spezielle Art der Richtungsabhängigkeit eines Werkstoffs/Materials. Orthotrope Materialien wie im Bild haben die folgenden Eigenschaften:
- Das Kraft-Verformungs-Verhalten ändert sich nicht, wenn das Material um 180 Grad um die Orthotropieachsen gedreht wird.
- Im Bezugssystem parallel zu den Orthotropieachsen gibt es keine Kopplung zwischen Normaldehnungen und Schubverzerrungen.
Ein linear elastisches orthotropes Material besitzt maximal neun Materialparameter.
Ein Material ist isotrop, wenn es richtungsunabhängig dasselbe Kraft-Verformungs-Verhalten hat. Bei anisotropen Materialien ist das Kraft-Verformungs-Verhalten von der Belastungsrichtung abhängig. Die Orthotropie ist ein Spezialfall der Anisotropie und enthält ihrerseits die kubische Anisotropie, transversale Isotropie und Isotropie als Sonderfälle.
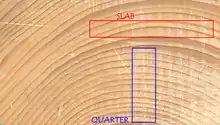
Viele Konstruktionswerkstoffe sind orthotrop, z. B. technisches Holz, Gewebe, viele Faser-Kunststoff-Verbunde und Walzbleche mit Textur. Kristalle des rhombischen Kristallsystems sind orthotrop[1]:390, Spezialfälle kommen im tetragonalen[1]:391, hexagonalen[1]:393 und kubischen Kristallsystem vor.
Symmetriegruppe
Die Richtungsabhängigkeit eines Materials zeichnet sich dadurch aus, dass das Kraft-Verformungs-Verhalten unabhängig (invariant) ist gegenüber nur bestimmten Drehungen des Materials: Bei der Orthotropie sind dies alle 180-Grad-Drehungen um die Orthotropieachsen. Diese Drehungen bilden zusammen mit der Punktspiegelung die Symmetriegruppe des orthotropen Materials.[1]:380
Die Invarianz gegenüber diesen Drehungen des Materials veranschaulichen zwei Experimente an einem Teilchen: Im ersten Experiment bringt man am Teilchen eine bestimmte Kraft auf und misst die resultierende Verformung. Im zweiten Experiment dreht man das Material zunächst nacheinander um beliebige Orthotropieachsen – um 180 Grad. Dann bringt man dieselbe Kraft auf wie im ersten Experiment und misst erneut die Verformung. Bei orthotropem Material wird man im zweiten Experiment dieselbe Verformung messen wie im ersten. Und zwar auch bei nicht-linear elastischem Materialverhalten.
Die Abhängigkeit von den Drehungen des Materials erkennt man, wenn man im zweiten Experiment um einen anderen Winkel als 180 Grad dreht. Wenn nicht der Spezialfall transversale Isotropie oder Isotropie vorliegt, wird man nun immer eine andere Verformung messen als im ersten Experiment.
Die angesprochenen Drehungen werden in der Kontinuumsmechanik durch orthogonale Tensoren Q repräsentiert. Eine Symmetriegruppe gR besteht aus denjenigen Transformationen, die die Formänderungsenergie e invariant lassen. Mathematisch wird das mit dem Verzerrungstensor E durch
- für alle E

ausgedrückt.[1]:379 Darin bedeutet „·“ das Matrizenprodukt und das hochgestellte „⊤“ eine Transponierung. Mit Q gehört auch -Q zur Symmetriegruppe, was durch Hinzufügen des negativen Einheitstensors -1, der eine Punktspiegelung repräsentiert, zu gR berücksichtigt wird. Die Symmetriegruppe des orthotropen Materials ist[1]:382

Darin steht für den orthogonalen Tensor, der mit dem Winkel α in Radiant um die -te Orthotropieachse dreht. Die 180-Grad-Drehung um die 3-Achse ist in gR enthalten, denn



Invarianten
In der isotropen Hyperelastizität hängt die Formänderungsenergie von den Hauptinvarianten I1,2,3 des Verzerrungstensors E ab:
- e(E)=e(I1, I2, I3)
Die analoge Darstellung der Anisotropie erfordert, dass ein komplettes System von skalarwertigen Funktionen bekannt ist, die unter allen Transformationen in der Symmetriegruppe gR invariant sind.[1]:380 Bei der Orthotropie bleiben die folgenden Terme invariant:[1]:382
- E11, E22, E33, E232, E132, E122, E12E23E13.
Darin ist Eij := êi·E·êj für i,j=1,2,3 und ê1,2,3 sind die Einheitsvektoren in Richtung der paarweise orthogonalen Orthotropieachsen.
Orthotropie in der Linearen Elastizitätstheorie
Gegeben sind zwei Tensoren zweiter Stufe und mit 3×3-Koeffizienten bzw. . Der allgemeinste lineare Zusammenhang, den es zwischen diesen Koeffizienten gibt, ist:




- .

Darin sind 81 Koeffizienten mit denen die neun Komponenten auf neun Komponenten abgebildet werden. In der linearen Elastizitätstheorie, in der der symmetrische Spannungstensor und der symmetrische Verzerrungstensor ist, reduziert sich die Anzahl der unabhängigen Tensor-Komponenten auf sechs, so dass nur 36 Koeffizienten unabhängig sind. Diesen Zusammenhang zwischen Spannungen und Verzerrungen kann man nun in Voigt’scher Notation auch als Matrizengleichung schreiben:

- .

Die Matrix mit den 36 unabhängigen Komponenten repräsentiert den Elastizitätstensor des Materials. Im Fall der Hyperelastizität ist diese Matrix symmetrisch, so dass dann nur noch 21 Einträge unabhängig sind.

Materialparameter
Die Koeffizienten des Elastizitätstensors ergeben sich bei orthotroper linearer Elastizität aus nur neun Materialparametern, die in Versuchen an makroskopischen Proben ermittelt werden können:
| Formelzeichen | Bedeutung |
|---|---|
| Elastizitätsmoduln in den Orthotropieachsen | |
| Schubmoduln in Ebenen senkrecht zu den Orthotropieachsen | |
| Querkontraktionszahlen bei Zug in Richtung einer Orthotropieachse |



Die Dimension der Elastizitätsmoduln und Schubmoduln ist Kraft pro Fläche während die Querkontraktionszahlen dimensionslos sind.


Die Querkontraktionszahlen beschreiben, wie sich eine entlang einer Richtung – z. B. der 1-Richtung – gezogene Materialprobe quer dazu – z. B. in 2-Richtung – kontrahiert. Die entsprechende Querkontraktionszahl wäre dann . Die Normaldehnung in i-Richtung wird mit bezeichnet. Dann ist für beliebige Werkstoffe die Querkontraktionszahl das negative Verhältnis der Normaldehnung in j-Richtung (Wirkung) zu derjenigen in i-Richtung bei Zug in i-Richtung (Ursache):



Wegen des Ursache-Wirkungs-Konzepts ist meistens .

Elastizitätsgesetz für 3D
Ein Material ist linear elastisch orthotrop, wenn eine Orthonormalbasis existiert, so dass das Elastizitätsgesetz dargestellt in Bezug auf diese Basis folgende Form annimmt:

Die Matrix S ist die Nachgiebigkeitsmatrix und ihre Symmetrie erfordert:

sodass von den zwölf Einträgen nur neun unabhängig sind.
Invertierung der Nachgiebigkeitsmatrix unter Berücksichtigung ihrer Symmetrie liefert die ebenfalls symmetrische Steifigkeitsmatrix

mit

Die Nachgiebigkeitsmatrix und die Steifigkeitsmatrix sind an denselben Stellen mit von Null verschiedenen Werten besetzt.
Spezialfälle der Orthotropie
In der kubischen Anisotropie sind die Elastizitäts- und Schubmoduln sowie die Querdehnzahlen alle gleich:

womit nur drei unabhängige Elastizitätsparameter übrig bleiben. Transversale Isotropie mit fünf unabhängigen Elastizitätsparametern stellt sich ein mit:

In der Isotropie gelten die Identitäten der kubischen Anisotropie und die drei übrig bleibenden unabhängigen Größen sind zusätzlich durch den letzten Zusammenhang in der transversalen Isotropie verbunden, sodass nur noch zwei unabhängige Elastizitätsparameter übrig bleiben.
Ebener Spannungszustand
In dünnwandigen Strukturen aus orthtropem Material sind zwei der Orthotropieachsen oftmals in den Vorzugsrichtungen der Struktur gelegen, wie zum Beispiel bei Holzplatten, und es liegt ein ebener Spannungszustand vor.
Hier ist σ13=σ23=σ33=0 und aus letzterer Identität leitet sich

ab. Das Elastizitätsgesetz vereinfacht sich zu

bzw.

mit jeweils symmetrischer Nachgiebigkeits- bzw. Steifigkeitsmatrix.
In der linearen orthotropen Elastizität für den Ebenen Spannungszustand werden die Schubmoduln nicht gebraucht, sodass nur sieben Materialparameter ausreichen, und wenn nur die Spannungen und Verzerrungen in der Ebene interessieren, sind es nur mehr vier Materialparameter.

Ebener Verzerrungszustand
Hier finden die Verzerrungen ausschließlich in der 1-2-Ebene statt, nur die Normalspannung senkrecht zur Ebene darf auftreten. Aus leitet sich


mit
ab. Das Elastizitätsgesetz reduziert sich auf

bzw.

mit jeweils symmetrischer Steifigkeits- bzw. Nachgiebigkeitsmatrix.
In der linearen orthotropen Elastizität für den Ebenen Verzerrungszustand werden die Schubmoduln nicht gebraucht, sodass nur sieben Materialparameter ausreichen, und wenn nur die Spannungen und Verzerrungen in der Ebene interessieren entfällt zusätzlich E3, sodass nur mehr sechs Materialparameter gebraucht werden.
Stabilitätskriterien
Die Materialparameter können nicht beliebig gewählt werden, sondern müssen gewissen Stabilitätskriterien genügen. Diese folgen aus der Forderung, dass die Steifigkeits- und Nachgiebigkeitsmatrizen positiv definit sein müssen. Dies führt auf die Bedingungen:
- Alle Diagonalelemente der Steifigkeits- und Nachgiebigkeitsmatrix müssen positiv sein (damit sich das Material in Zugrichtung streckt, wenn man daran zieht, und nicht staucht) und
- die Determinante der Steifigkeits- und Nachgiebigkeitsmatrix muss positiv sein (damit es unter Druck komprimiert und nicht expandiert).
Werden an einem realen Werkstoff Materialparameter identifiziert, die diesen Stabilitätskriterien widersprechen, ist Vorsicht geboten. Die Stabilitätskriterien lauten:[2]

Wenn die linke Seite der letzten Ungleichung gegen null geht, setzt das Material einer hydrostatischen Kompression zunehmend Widerstand entgegen. Aus der Symmetrie der Nachgiebigkeitsmatrix folgt ergänzend:

Herleitung
In der Hyperelastizität ergeben sich die Spannungen aus der Ableitung der Formänderungsenergie nach den Dehnungen. Damit die Spannungen linear in den Dehnungen sind, muss demnach die Formänderungsenergie quadratisch in den Dehnungen sein, denn nur dann ist ihre Ableitung linear. Unter Verwendung der #Invarianten Terme ergibt sich der Ansatz

mit neun Parametern a bis p. Um dies nach ε ableiten zu können, müssen die Komponenten εij als Funktion des Tensors ε ausgedrückt werden. Dies gelingt mit der Darstellung des Frobenius-Skalarprodukts ":" als Spur:

Mit der Abkürzung für die symmetrisierten dyadischen Produkte der Orthotropieachsenvektoren ist dann[3]


Aus dem Ansatz der Formänderungsenergie berechnen sich die Spannungen zu

oder in Voigt-Notation im ê1,2,3-System

Im #Elastizitätsgesetz für 3D lassen sich die Parameter direkt ablesen. Ableitung der Spannungen nach den Dehnungen liefert den konstanten und symmetrischen Elastizitätstensor 4. Stufe:

Die Tensoren Kii werden Strukturvariable genannt, weil sie die interne Struktur des Materials repräsentieren[1]:387 und mit ihnen auch die invarianten Terme dargestellt werden können. Nicht-linear hyperelastisches Verhalten kann modelliert werden, indem
- die Parameter a bis p durch Funktionen der invarianten Terme ersetzt werden, siehe Hyperelastizität#Orthotrope Hyperelastizität, und/oder
- die invarianten Terme höherer Ordnung im Ansatz zur Formänderungsenergie berücksichtigt werden.[1]:394
Gründe für die Besetztheit der Steifigkeitsmatrix
In diesem Abschnitt wird die Frage geklärt, warum die Steifigkeitsmatrix nur an den entsprechenden Stellen besetzt ist. Im Allgemeinen tauchen in einem linearen Materialgesetz 21 unabhängige Materialkonstanten auf. Im Fall der Orthotropie reduziert sich aber die Zahl der Konstanten auf 9. Warum das so ist, ist nachfolgend dargestellt.
Drehmatrizen bei 180-Grad-Drehungen
Die (linearen) Abbildungen, die 180-Grad-Drehungen um die Orthotropieachsen beschreiben, lassen sich mit Matrizen beschreiben. Wählt man als Bezug eine Basis, deren Basisvektoren sich mit den senkrecht aufeinanderstehenden Drehachsen decken, dann haben diese orthogonalen Matrizen folgende Gestalt

Diese 3 Matrizen bilden eine echte Untergruppe der Drehgruppe SO(3). Das Produkt dieser drei Matrizen ist die Einheitsmatrix: .

Die 3 Matrizen Ax,y,z und zusätzlich die negative Einheitsmatrix -E, die eine Punktspiegelung repräsentiert, bilden die Symmetriegruppe des orthotropen Materials[1]:382. Die Symmetriegruppe eines anisotropen Materials ohne -E ist immer eine echte Untergruppe der Drehgruppe SO(3); SO(3) mit -E ist die Symmetriegruppe eines isotropen Materials.
Symmetriebedingung in Indexschreibweise und Voigt’scher Notation
Gedankenexperiment: Ein Teilchen und dessen Umgebung wird einer bestimmten Deformation unterzogen und damit einem bestimmten Verzerrungstensor . Im einfachsten Fall (der allerdings zur Definition der Orthotropie nicht ausreichend allgemein ist) könnte das Teilchen nur in einer bestimmten Richtung gestreckt werden. Nun ändert man die Streckungsrichtung aktiv. Das heißt, man lässt den materiellen Punkt wie er ist (dreht also das Material nicht) und unterzieht den Punkt aber (derselben) Streckung in anderer Richtung. Man gelangt damit zu einem anderen Verzerrungstensor .


Die Änderung der Verzerrungsrichtung kann mit einer Drehmatrix beschrieben werden. Es gilt


Mithilfe eines linearen Materialgesetzes lässt sich für gegebenen Verzerrungstensor der zugehörige Spannungstensor ermitteln. Es sei


Im allgemeinen Fall der Anisotropie gilt zwar nicht

Aber genau dies fordert man für die oben beschriebene Teilmenge von SO(3) im Fall der Orthotropie: Ein Material heißt orthotrop, wenn für die Funktion folgende Symmetrietransformation für jede der oben genannten (orthogonalen) Drehmatrizen und für beliebige Verzerrungen gilt

In Indexschreibweise

Nun dieselbe Bedingung in Voigt’scher Notation: Mit der Definition

gilt

Mit der neuen Definition

ergibt sich

In Voigt’scher Notation erhält man also als Symmetriebedingung

Und da dies für beliebige Dehnungen gelten muss, ist die Symmetriebedingung

Spezialfall 180-Grad-Drehungen
Da im Spezialfall der Orthotropie die 3×3-Matrizen nur auf der Hauptdiagonalen besetzt sind, vereinfachen sich die Definitionen von oben zu: Die drei 3×3-Matrizen entsprechen also den drei 6x6-Matrizen


Auswertung der Symmetriebedingungen für den Spezialfall
Die Symmetriebedingung ausgewertet für diese Matrizen ergibt

An den letzten 3 Gleichungen erkennt man, dass nur folgende Gestalt haben kann


Da diese Voigt’sche Steifigkeitsmatrix außerdem symmetrisch ist, bleibt

Zusammenfassung
- Die Orthotropie in der linearen Elastizitätstheorie lässt sich definieren als ein Spezialfall der Anisotropie, bei dem die Steifigkeits- oder Nachgiebigkeitsmatrix eine besonders einfache Form annimmt (9 Konstanten anstelle von 21 Konstanten im allgemeinen Fall).
- Neben der Orthotropie gibt es noch andere Spezialfälle der Anisotropie, z. B. Transversalisotropie, Isotropie etc. Hierbei werden dieselben Symmetriebedingungen angegeben. Nur werden dann andere Untergruppen der Drehgruppe (also andere Matrizen ) betrachtet.
- An der Form des elastischen Gesetzes erkennt man, dass die Kopplung zwischen Zug und Schub für Belastung entlang der Orthotropierichtungen entfällt.
Siehe auch
Weblinks
Einzelnachweise
- P. Haupt: Continuum Mechanics and Theory of Materials. Springer, 2002, ISBN 978-3-642-07718-0.
- Holm Altenbach: Kontinuumsmechanik. Einführung in die materialunabhängigen und materialabhängigen Gleichungen. Springer-Verlag, Berlin/Heidelberg 2012, ISBN 978-3-642-24118-5, S. 331, doi:10.1007/978-3-642-24119-2.
- Die ij-Komponente eines beliebigen Tensors zweiter Stufe T im ê1,2,3-System ist








Literatur
- J.F. Nye: Physical Properties of Crystals: Their Representation by Tensors and Matrices. Oxford University Press, 1985, ISBN 978-0-19-851165-6.
- H. Altenbach, J. Altenbach, R. Rikards: Einführung in die Mechanik der Laminat- und Sandwichtragwerke. Deutscher Verlag für Grundstoffindustrie, Stuttgart 1996, ISBN 3-342-00681-1.