Inertiale Messeinheit
Eine inertiale Messeinheit (englisch inertial measurement unit, IMU) ist eine räumliche Kombination mehrerer Inertialsensoren wie Beschleunigungssensoren und Drehratensensoren. Sie stellt die sensorische Messeinheit eines Trägheitsnavigationssystems (englisch Inertial Navigation System, INS) dar[1]. Anwendungen von IMUs liegen unter anderem bei Flugzeugen und Raketen zur Flugnavigation. In Schiffen, in der Robotik sowie bei der Bildstabilisierung dienen sie zur Bewegungsdetektion. Bei Lenkflugkörpern und unbemannten Luftfahrzeugen (UAVs) dienen sie auch der regelungstechnischen Stabilisierung des Fluggerätes im Raum. Bei Motorrädern liefert die IMU weitere Grundlagen für die Interpretation des fahrdynamischen Zustands durch die Bordelektronik. Somit können elektronische Fahrwerke, Motorsteuerung, Hinterradabhebeschutz oder das ABS präziser arbeiten, auch in Abhängigkeit von Schräglage sowie von Beschleunigung und Nickbewegung in/gegen Fahrtrichtung, jeweils relativ zur Gravitationsgeraden.
.jpg.webp)
Entsprechend genaue und langzeitstabile inertiale Messeinheiten sind wesentliche Bestandteile der Trägheitsnavigationssysteme von Langstreckenraketen oder Marschflugkörpern und unterliegen oftmals Handelsbeschränkungen und Ein- beziehungsweise Ausfuhrbeschränkungen.
Aufbau
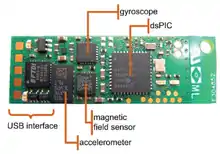
Zur Erfassung der sechs möglichen kinematischen Freiheitsgrade verfügt eine IMU über drei jeweils aufeinander orthogonal stehende Beschleunigungssensoren (Translationssensoren) für die Erfassung der translatorischen Bewegung in x- bzw. y- bzw. z-Achse und drei orthogonal zueinander angebrachten Drehratensensoren (Gyroskopische Sensoren) für die Erfassung rotierender (kreisender) Bewegungen in x- bzw. y- bzw. z-Achse. Eine inertiale Messeinheit liefert als Messwerte drei lineare Beschleunigungswerte für die translatorische Bewegung und drei Winkelgeschwindigkeiten für die Drehraten. In einem Trägheitsnavigationssystem (INS) wird aus den Messwerten der IMU für die lineare Beschleunigungen, nach Kompensation der Erdbeschleunigung, durch Integration die lineare Geschwindigkeit und nochmalige Integration die Position im Raum bezogen zu einem Referenzpunkt ermittelt. Die Integration der drei Winkelgeschwindigkeiten liefert, bezogen zu einem Referenzpunkt, die Orientierung im Raum.
Zum Bestimmen der Integrationskonstanten, zur Verbesserung der Genauigkeit und um die Nullpunkt- und Langzeitdrift der oben genannten Sensoren zu korrigieren, werden bei manchen IMUs zusätzliche Magnetometer (Magnetfeldsensoren) und GNSS-Sensoren integriert.
Typen
Inertiale Messeinheiten lassen sich in der Art des Aufbaus in zwei große grundlegende Gruppen unterteilen:[1]
IMU mit stabiler Plattform
.JPG.webp)
IMUs mit stabiler Plattform (englisch Stable platform) sind dadurch gekennzeichnet, dass alle Inertialsensoren im Inneren auf einer im Raum stabilisierten Plattform untergebracht sind. Dieser Aufbau ist den Kreiselinstrumenten nachempfunden und stellt auch die ältere Bauform von IMUs dar. Die stabilisierte Plattform ist dabei über eine kardanische Aufhängung frei im Raum bewegbar und wird in den Aufhängungen über drei Stellmotoren so bewegt, dass äußere Drehbewegungen kompensiert werden. Die Stellmotoren werden so bewegt, dass die Drehratensensoren ein minimales Signal liefern, zugleich ist die Stellgröße der Motoren ein Ausdruck für die Orientierung. Der Vorteil besteht daran, dass die ebenfalls auf der stabilisierten Plattform untergebrachten Beschleunigungssensoren, nach Korrektur um den Wert der Erdbeschleunigung, direkt als Sensorsignal die lineare Beschleunigungsinformation der translatorischen Bewegung liefern. Der Nachteil dieses Messaufbaus ist der mechanisch komplexe und empfindliche Aufbau und die Problematik hochdynamische Antriebssysteme für die kardanische Aufhängung zu benötigen.
Strapdown-IMU
Strapdown-IMUs sind dadurch gekennzeichnet, dass die Inertialsensoren fest mit dem äußeren Rahmen verbunden sind. Es sind je drei Sensoren für die Drehraten und Beschleunigungen bezogen auf die drei IMU-Achsen verbaut. Im einfachen Fall einer linearen Bewegung in genau einer dieser Achsen ließe sich die aktuelle Position durch zweifaches Aufintegrieren der mit geeigneter Abtastrate laufend zu messenden Beschleunigung in Bewegungsrichtung vergleichsweise einfach berechnen[2]. Im allgemeinen Fall dagegen liefern die Beschleunigungssensoren nicht nur bei linearen Beschleunigungen ein Signal, sondern weisen auch einen Signalanteil zufolge der Rotationsbewegung auf, welcher zur Bestimmung der translatorischen Beschleunigungswerte kompensiert werden muss. Dazu ist es notwendig, die Sensorsignalwerte der drei Rotationssensoren zu integrieren und die so gewonnene Information über die Orientierung im Raum zur Berechnung der linearen Beschleunigungswerte aus den Messwerten der Beschleunigungssensoren zu verwenden. Erst nach diesem Berechnungsschritt kann bei den Beschleunigungswerten die Kompensation um den Wert der Erdbeschleunigung erfolgen. Dieser Algorithmus nennt sich Strapdown-Algorithmus.
Der Vorteil von Strapdown-IMUs ist der Entfall der mechanisch aufwändigen kardanischen Aufhängung und deren Ansteuerung. Damit sind im Aufbau wesentlich kompaktere IMUs realisierbar. Bei geringen Anforderungen an die Genauigkeit und Langzeitstabilität sind nach diesem Typ auch kostengünstige IMUs für Anwendungen wie der Flugstabilisierung von Flugmodellen verfügbar.
Inertialsensoren
Je nach Anforderung an die Genauigkeit und Langzeitstabilität finden verschiedene Typen von Inertialsensoren Anwendung, die Genauigkeit der verwendeten Inertialsensoren wirkt sich deutlich auf die Genauigkeit eines inertialen Meßsystems aus.[3]
Drehratensensoren
Die in IMUs eingesetzten Drehratensensoren sind, bei hohen Anforderungen an die Genauigkeit und Stabilität, optische Systeme. Sie sind entweder realisiert als Faserkreisel (englisch fibre optic gyroscope, FOG) oder als Laserkreisel (Ringlaser, englisch ring laser gyroscope, RLG).
Bei geringen Stabilitätsanforderungen finden mikro-elektro-mechanische Systeme (MEMS) Anwendung, welche den Vorteil bieten sich direkt in integrierten Schaltkreisen realisieren zu lassen und den Aufbau sehr kompakter IMUs erlauben. Allerdings ist die Langzeitstabilität um mehrere Größenordnungen schlechter als bei optischen Systemen: So beträgt beispielsweise die Drift bei einem in Waffensystemen eingesetzten Laserkreiselsystem 0,0035° pro Stunde. Bei einem MEMS-basierenden Drehratensensor auf Halbleiterbasis liegt die Drift bei ca. 70° pro Stunde.[1]
Beschleunigungssensoren
Die in IMUs eingesetzten Beschleunigungssensoren richten sich ebenfalls nach der nötigen Genauigkeit und Langzeitstabilität. Üblich sind unter anderem piezoelektrische Beschleunigungssensoren basierend auf Quarzstäben, welche durch die Beschleunigung gering gebogen werden und einen elektrischen Schwingkreis gering verstimmen. Weiter existieren zur Messung der Beschleunigung mikro-elektro-mechanische Systeme (MEMS), welche sich wie bei den Drehratensensoren direkt in integrierten Schaltkreisen realisieren lassen.
Siehe auch
Literatur
- David Titterton, John Weston: Strapdown Inertial Navigation Technology. IEE Radar, Sonar, Navigation and Avionics Series. 2. Auflage. Institution of Engineering and Technology, 2005, ISBN 978-0-86341-358-2.
Einzelnachweise
- Oliver J. Woodman: An introduction to inertial navigation. UCAM-CL-TR-696. University of Cambridge, Computer Laboratory, 2007 (Online).
- Jörg Böttcher: Kompendium Messtechnik und Sensorik: Inertiale Messeinheiten (IMU). Abgerufen am 27. September 2019.
- Introduction into Inertial Measurement Technology