Kernmodul Tianhe
Das Kernmodul Tianhe (chinesisch 天和號核心艙 / 天和号核心舱, Pinyin Tiānhé Hào Héxīncāng, deutsch Himmlische Harmonie) ist das erste Modul der Chinesischen Raumstation. Es wurde am 29. April 2021 mit einer Trägerrakete vom Typ Langer Marsch 5B vom Kosmodrom Wenchang gestartet.
| Tianhe | ||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
 | ||||||||||||||||||||||
| Raumstation: | Chinesische Raumstation | |||||||||||||||||||||
| Startdatum: | 29. April 2021 | |||||||||||||||||||||
| Trägerrakete: | Langer Marsch 5B | |||||||||||||||||||||
| Masse: | 22,5 t | |||||||||||||||||||||
| Länge: | 16,6 m | |||||||||||||||||||||
| Durchmesser: | 4,2 m | |||||||||||||||||||||
| Volumen: | 50 m³ (Wohnraum) | |||||||||||||||||||||
| Benachbarte Module | ||||||||||||||||||||||
| ||||||||||||||||||||||
Beschreibung
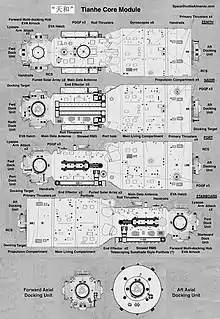
Das von der Chinesischen Akademie für Weltraumtechnologie gebaute Kernmodul Tianhe ist das Kontrollzentrum der Chinesischen Raumstation, dort befinden sich Lebenserhaltungssysteme, Energieversorgung, Navigation, Antrieb und Lageregelung. Das Modul ist 16,6 m lang, sein größter Durchmesser beträgt 4,2 m und sein Startgewicht 22,5 t.[1] Das Kernmodul bietet drei Raumfahrern Platz zum Leben und Arbeiten; selbst ohne Erweiterung durch die Wissenschaftsmodule können dort Experimente durchgeführt werden.
Das Kernmodul besitzt an seinem vorderen Ende eine kugelförmige Schleusensektion, an der von vorne und unten bemannte Raumschiffe an- und abkoppeln können. Links und rechts an der Sektion werden zu einem späteren Zeitpunkt die Wissenschaftsmodule fest montiert, während sich oben die Ausstiegsluke für Außenbordeinsätze befindet. Anschließend an die Schleusensektion folgt ein Korridor mit 2,8 m Durchmesser, der zur Arbeitssektion des Moduls führt.[2] In der Korridorsektion befinden sich, direkt an die Schleusensektion anschließend, Bad und Toilette sowie die Schlafkabinen der drei Besatzungsmitglieder. Jedem Raumfahrer steht eine eigene, wenn auch beengte Kabine mit Fenster zur Verfügung.[3]
Durch diese Anordnung können die Raumfahrer, auch wenn sie im Schlaf von einem Notfall überrascht werden, in maximal fünf Minuten die nicht betroffenen Module sichern und sich entweder in das Wissenschaftsmodul Wentian flüchten, von wo aus die Station ebenfalls gesteuert werden kann, oder in das ständig angekoppelte Shenzhou-Raumschiff.[4] Im Inneren der Station wurde nur schwer entflammbares Material verwendet, die Führung von elektrischen Leitungen mit hoher Spannung wurde sehr sorgfältig gewählt, und bei sich nähernden, vom Forschungszentrum für die Beobachtung von Zielen und Trümmerstücken im Weltraum nicht im Vorfeld bemerkten Mikrometeoriten oder Weltraummüll leitet ein Radarsystem automatisch Ausweichmanöver ein.
Außen an der Korridorsektion sind die Parabolantenne für die Datenübertragung zur Erde und die jeweils 12 m langen Solarmodule befestigt. Die beiden Solarzellenflügel des Kernmoduls mit einer Gesamtfläche von 134 m² und einer Effizienz von mehr als 30 % liefern gut 9 kW Energie.[5] Zur Einordnung: jedes der vier HET-80-Ionentriebwerke (siehe unten) hat im Regelbetrieb eine elektrische Leistungsaufnahme von 700 W.[6] Es ist geplant, nach Vollendung der ersten Ausbaustufe die beiden Solarzellenflügel des Kernmoduls, die dann von den beiden Wissenschaftsmodulen Wentian und Mengtian teilweise verschattet werden, abzumontieren und mit Hilfe des mechanischen Arms (siehe unten) an den äußeren Enden der Wissenschaftsmodule zu befestigen,[7] sodass sie mit deren Solarzellenflügeln ein kurzes T bilden.[8]
Hinter dem Korridor vergrößert sich der Durchmesser des Moduls auf 4 m, wodurch die Raumfahrer etwa 50 m³ Wohnraum zur Verfügung haben. Wenn – voraussichtlich 2022 – die beiden Wissenschaftsmodule anmontiert sind, vergrößert sich der freie Raum auf 110 m³. In der Arbeitssektion befinden sich Laborschränke für weltraummedizinische Experimente, außerdem ein Fahrradergometer und ein Laufband, mit denen die Raumfahrer dem Muskelschwund in den Beinen entgegenwirken können.[9]
Anschließend an die Arbeitssektion folgt der Maschinenraum mit den Lebenserhaltungssystemen, den Treibstofftanks und den vier in gleichem Abstand außen rund um das Modul verteilten Haupttriebwerken. Der Maschinenraum kann durch einen etwa 1/3 des Raumes einnehmenden Tunnel durchquert werden, der zur hinteren Schleuse führt, sodass die Besatzung aus dem Raumfrachter Tianzhou oder dem Raumschiff der neuen Generation, wenn es in seiner Konfiguration als unbemanntes Versorgungsraumschiff operiert, Essenspakete etc. ausladen und Rückfracht einladen kann. Die Lageregelung der Station findet über 22 Steuerdüsen sowie sechs Momentenkreisel statt, die außen am Übergang zwischen Korridor und Arbeitssektion angeordnet sind.[10] Außerdem kann die Station noch mit den Triebwerken eines an die hintere Schleuse angekoppelten Versorgungsraumschiffs, sei es nun das Raumschiff der neuen Generation oder ein Tianzhou-Frachter, manövriert werden.[11]
Zur routinemäßigen Aufrechterhaltung der Orbitalhöhe, die durch die Anziehungskraft der Erde und die Reibung an den dünnen Gasen der Thermosphäre ohne unterstützende Maßnahmen im Laufe der Zeit absinken würde, besitzt das Kernmodul am Heck vier Hallantrieb-Ionentriebwerke von Typ HET-80, die in zwei Zweiergruppen an der Ober- und an der Unterseite angeordnet sind. Jedes dieser vom Shanghaier Institut für Weltraumantriebe der Akademie für Flüssigkeitsraketentriebwerkstechnik entwickelten Triebwerke besitzt eine Schubkraft von 80 mN,[5] der spezifische Impuls beträgt 1600 s bzw. 15,7 km/s, der Schubimpuls 2 MN·s.[12] Als Stützmasse wird Xenon verwendet. Bei einem Test, der vom 11. Dezember 2016 bis zum 25. April 2018 am Gemeinsamen Labor für Plasma und Antriebe (等离子体与推进联合实验室) der Universität für Luft- und Raumfahrt Peking durchgeführt wurde, absolvierte ein Exemplar 8241 Betriebsstunden, was den geforderten 8000 Betriebsstunden während der damals erwarteten Lebensdauer des Moduls von 10 Jahren entsprach.[13] Vom 23. bis 24. September 2021 wurden die vier Triebwerke erstmals im Orbit getestet. Alle Parameter entsprachen den Vorgaben, die Überwachung der Xenonflammen durch eine Außenkamera der Station bestätigte das einwandfreie Arbeiten der Triebwerke.[14]
Das Konzept der Chinesischen Raumstation geht davon aus, dass das Kernmodul (核心舱) Tianhe am Ende der ersten Ausbauphase mit den beiden Wissenschaftsmodulen Wentian und Mengtian zu einer Kerneinheit (核心组合体) mit integrierten, gemeinsam genutzten Systemen für Stromversorgung, Kühlung etc. verschmilzt, an die dann weitere Module entweder fest montiert werden (das zweite T) oder gelegentlich andocken (das Xuntian-Teleskop). Da aber aus ingenieurtechnischen Gründen zwischen dem Start des Kernmoduls und dem der Wissenschaftsmodule mehr als ein Jahr liegt, in dem Raumfahrer auf der Station leben und arbeiten müssen, sind die Lebenserhaltungssysteme des Kernmoduls zunächst überdimensioniert. Dies bietet später, während der Betriebsphase eine durchaus erwünschte Redundanz.[15]
Laborschränke
Mikrogravitation
Da auf die Raumstation neben der Erdanziehung auch noch der Strahlungsdruck der Sonne und die Bremskraft der Thermosphäre einwirken, herrscht dort nicht wirklich Schwerelosigkeit, sondern ein Schwerefeld von 10−3 bis 10−5 g. Für physikalische Experimente ist das zu viel. Daher wurde von der Chinesischen Akademie der Wissenschaften ein Laborschrank konstruiert, in dem eine Experimentenkammer von einem Luftstrom in der Schwebe gehalten wird und eine von der Wand der Kammer getrennte Experimentenplattform in Inneren von einem Elektromagneten. Wenn nur die Magnetschwebetechnik zum Einsatz kommt, lässt sich die Schwerkraft auf 10−6 g reduzieren. Wenn zusätzlich die gesamte Kammer über den Luftstrom den Bewegungen der Raumstation auf ihrer Bahn um die Erde nachgeführt wird, kann man die Schwerkraft auf 10−7 g senken, also Mikrogravitation im eigentlichen Sinne des Wortes.
Mit dem Gerät – die finalen Montagearbeiten wurden von den Raumfahrern im August 2021 durchgeführt – sollen Experimente zur Gravitationsphysik und zur Relativitätstheorie durchgeführt werden,[16] so zum Beispiel ab 2022 zum schwachen Äquivalenzprinzip auf der atomaren Ebene.
Materialforschung
Für materialwissenschaftliche Forschung und Produktion im Labormaßstab bietet die Raumstation die Möglichkeit zur sogenannten „Behälterlosigkeit“. In einem Ofen werden mittels Elektromagneten mit einer Präzision von 0,1 mm in der Schwebe gehaltene Metalle im Vakuum oder in Gasen von einstellbarer Zusammensetzung und Druck mit einem Laser zum Schmelzen gebracht.[17] Die höchste in dem Ofen erzielbare Temperatur beträgt 3000 °C. Die entstehende Schmelze bildet einen kugelförmigen Tropfen, der ohne Kontakt mit der Ofenwand oder irgendwelchen Behältern frei schwebt und daher auch nicht von Behältermaterial verunreinigt werden kann. Die Mechanismen während des Abkühlprozesses können beobachtet und die Eigenschaften des sehr reinen und seine ursprüngliche Kugelform behaltenden Materials bestimmt werden. Dieser Laborschrank dient derzeit primär der Entwicklung von Legierungen für die starken thermischen Belastungen ausgesetzten Schaufeln von Gasturbinen der neuen Generation. Weitere Forschungsschwerpunkte sind Legierungen für die Turbinenschaufeln von Flugzeugtriebwerken, Lanthan-Titan-Glas mit hohem Brechungsindex und Materialien für elektrooptische Anwendungen wie zum Beispiel Yttrium-Aluminium-Granat für Laser.[18][19]
In dem Gerät werden immer mehrere Proben auf einmal behandelt. Die Raumfahrer brauchen nur die Schachteln auszuwechseln, in denen sich in einzelnen Fächern die Proben befinden. Die eigentlichen Versuche werden per Fernsteuerung von der Erde aus durchgeführt.[20]
Mechanischer Arm
Technisch gesehen sind die Module der Station Raumschiffe, die mit ihren eigenen Triebwerken selbständig manövrieren können. Am 19. Juni 2017 hatte man mit dem Raumlabor Tiangong 2 und dem Versorgungsraumschiff Tianzhou 1 auch das Ankoppeln aus verschiedenen Richtungen erfolgreich erprobt.[21] Diese Manöver sind aus bahnmechanisch-physikalischen Gründen jedoch hochgradig komplex – jede Änderung der Geschwindigkeit führt zu einer Änderung der Orbitalhöhe.[22] Daher hatte man von Anfang an beschlossen, beim Aufbau der Station die rund 22 t schweren Wissenschaftsmodule[23] zunächst entlang der Längsachse an die Schleusensektion des Kernmoduls andocken zu lassen. Wenn Modul und Station zusammengekoppelt sind, soll ein zunächst an der Unterseite des Eingangskorridors verstauter, 10,2 m langer mechanischer Arm, der sieben Gelenke besitzt,[24] mit einem Ende einen von zwei Ansetzstutzen an der Oberseite der Schleusensektion ergreifen, mit dem anderen Ende das frisch angekommene Modul. Das Modul koppelt ab, bleibt aber über den Arm mit der Station verbunden und wird von diesem in seine endgültige Position zu einer Seitenschleuse verbracht, wo es fest montiert wird, ähnlich wie beim Zusammenbau der sowjetisch-russischen Raumstation Mir mittels der Lyappa-Arme.[25]
Der mechanische Arm ist eine Kernkomponente der Raumstation. Daher hatten die Verantwortlichen des bemannten Raumfahrtprogramms bereits 2007, also drei Jahre bevor der Bau der modularen Raumstation offiziell gestartet und finanziert war, die auf dem Gebiet der Robotik führenden Forschungsinstitute und Firmen des Landes kontaktiert. Während es 1998 bei der Suche nach dem besten Modell eines Mondrovers einen Wettbewerb mit rund einem Dutzend beteiligten Instituten gegeben hatte, wurden hier die angesprochenen Einrichtungen dazu angehalten, sich in gemeinsamer Arbeit mit dem Problem auseinanderzusetzen – das Prinzip der öffentlichen Ausschreibung wurde bei der Abteilung für Waffenentwicklung der Zentralen Militärkommission, der Nachfolgeorganisation des damals zuständigen Hauptzeugamts der Volksbefreiungsarmee, erst 2016 eingeführt. Ein erstes Demonstrationsmodell wurde gebaut, die einzelnen Arbeitsgebiete definiert und die Teile für ein in alle Richtungen drehbares Gelenk konstruiert. Ende September 2011 wurde der Entwurf für den mechanischen Arm von einer Expertenkommission abgenommen und gebilligt,[26] und im Juni 2015 fanden in der Hauptentwicklungsabteilung der Akademie für Weltraumtechnologie die ersten Tests mit einem Prototyp in Originalgröße statt.[27]
Der Arm hat ein Eigengewicht von 740 kg. Er besteht aus zwei am oberen Ende wie ein Zirkel mit einer Achse verbundenen Hauptabschnitten von jeweils 5 m Länge, an deren anderem Ende sich jeweils eine um drei Achsen drehbare „Hand“ befindet, die mit einer Präzision von 45 mm positioniert werden kann. Hierfür besitzt jede Hand eine Kamera – die auch für eine regelmäßige Inspektion der Außenwand der Station benutzt wird – und taktile Sensoren, dazu kommt noch eine Kamera am „Ellbogen“ in der Mitte des Arms.[28] Die Tragkraft des Arms, der für eine Lebensdauer von 15 Jahren ausgelegt ist, beträgt 25 t. Das heißt, die Wissenschaftsmodule mit einer trägen Masse von 22 t können problemlos bewegt werden. Außerdem kann der Arm dazu verwendet werden, den Raumfahrern bei Wartungs- und Reparaturarbeiten an der Außenseite der Station einen festen Boden unter den Füßen zu bieten, gegen den sie sich in der Schwerelosigkeit stemmen können. Der Arm kann entweder autonom agieren oder von den Raumfahrern ferngesteuert werden.[29]
Weblinks
- The robotic arm on the China Space Station (chinesisch mit englischen Untertiteln)
Einzelnachweise
- 杨璐茜: 空间站核心舱初样产品和新一代载人飞船试验船安全运抵文昌航天发射场. In: cmse.gov.cn. 20. Januar 2020, abgerufen am 25. Januar 2020 (chinesisch).
- 肖建军、杨璐茜: 空间站首次亮相!中国“天和”号空间站核心舱将在第十二届珠海航展对公众开放. In: cmse.gov.cn. 23. Oktober 2018, abgerufen am 1. Februar 2020 (chinesisch).
- 官方发布!神舟十二号航天员在轨拍摄作品震撼来袭! In: spaceflightfans.cn. 31. August 2021, abgerufen am 31. August 2021 (chinesisch).
- 刘冠青 et al.: 神舟十三号飞行乘组进行首次在轨紧急撤离演练. In: chinanews.com. 7. November 2021, abgerufen am 20. November 2021 (chinesisch).
- 天和号空间站核心舱发射任务圆满成功后的子系统官宣整理. In: spaceflightfans.cn. 29. April 2021, abgerufen am 29. April 2021 (chinesisch).
- 卢昕 et al.: 700W功率HET-80霍尔推力器束流特性研究. In: ixueshu.com. 1. August 2017, abgerufen am 2. Mai 2021 (chinesisch).
- 刘泽康: 总结经验,直面挑战,周建平总师展望中国载人航天新征程. In: cmse.gov.cn. 25. Oktober 2021, abgerufen am 28. Oktober 2021 (chinesisch).
- 王翔、王为: 天宫空间站关键技术特点综述. In: sciengine.com. 27. Oktober 2021, abgerufen am 3. November 2021 (chinesisch).
- 刘泽康: 神舟十二号载人飞行任务新闻发布会召开. In: cmse.gov.cn. 16. Juni 2021, abgerufen am 16. Juni 2021 (chinesisch).
- 华辉美食人: 中国新飞船将可重复用、带6人,空间站核心舱合练3个月. In: k.sina.com.cn. 22. Januar 2020, abgerufen am 25. Januar 2020 (chinesisch).
- 郭佳子、董能力、杨璐茜: 周建平:走进新时代的中国载人航天工程. In: cmse.gov.cn. 24. April 2018, abgerufen am 31. Januar 2020 (chinesisch).
- 张敏、杭观荣: 空间推进技术的革命. In: spaceflightfans.cn. 12. November 2016, abgerufen am 5. Oktober 2021 (chinesisch). Enthält Foto des HET-80.
- Hall Thruster & Hollow Cathode. In: jlpp.buaa.edu.cn. Abgerufen am 1. Mai 2021 (englisch).
- 路飞: 航天六院801所十年磨一剑 空间站电推进系统成功首秀. In: mp.weixin.qq.com. Abgerufen am 4. Oktober 2021 (chinesisch).
- 刘泽康: 1+1=? 中国载人航天工程空间站系统总指挥给出这样的答案. In: cmse.gov.cn. 15. Juli 2021, abgerufen am 15. Juli 2021 (chinesisch).
- Chinese Astronauts Activate Magnetic Levitation Experiment Facility Aboard Tiangong auf YouTube, 12. August 2021, abgerufen am 16. August 2021.
- 张馨方: 中国空间站首批在轨科学实验样品交接仪式在京举行. In: mp.weixin.qq.com. 23. Oktober 2021, abgerufen am 27. Oktober 2021 (chinesisch).
- 中国空间站首批在轨科学实验样品交接仪式在京举行. In: mp.weixin.qq.com. 23. Oktober 2021, abgerufen am 27. Oktober 2021 (chinesisch).
- 中国空间站向上海硅酸盐所移交首批在轨科学实验样品. In: sic.cas.cn. 25. Oktober 2021, abgerufen am 27. Oktober 2021 (chinesisch).
- 刘泽康: 国货之光,强出天际! In: cmse.gov.cn. 27. Juli 2021, abgerufen am 16. August 2021 (chinesisch).
- China's Tianzhou-1 completes second docking with space lab. In: chinadailyasia.com. 20. Juni 2017, abgerufen am 23. Juni 2017 (englisch).
- Bernd Leitenberger: Bahnen und Orbits von Satelliten. In: bernd-leitenberger.de. Abgerufen am 25. Januar 2020.
- 张智慧: 我国加快推进空间站工程建设 打造空间科学和新技术试验基地. In: cmse.gov.cn. 30. November 2012, abgerufen am 26. Januar 2020 (chinesisch).
- Jiang Zhihong et al.: Progress and Development Trend of Space Intelligent Robot Technology. In: spj.sciencemag.org. 25. Januar 2022, abgerufen am 30. Januar 2022 (englisch).
- David S. F. Portree: Mir Hardware Heritage. (PDF) In: spaceflight.nasa.gov. Abgerufen am 25. Januar 2020 (englisch). S. 165 und passim.
- 张大伟、陈宏宇: 我国空间站机械臂系统方案通过评估. In: cmse.gov.cn. 2. August 2011, abgerufen am 25. Januar 2020 (chinesisch).
- 王炜: 空间站大型机械臂初样阶段研制工作获新突破. In: cmse.gov.cn. 19. Juni 2015, abgerufen am 29. Januar 2020 (chinesisch).
- 刘泽康: 机械臂,多项全能! In: cmse.gov.cn. 5. August 2021, abgerufen am 16. August 2021 (chinesisch).
- 庞丹: 天和核心舱完成在轨测试验证,这项“黑科技”你一定得知道! In: spaceflightfans.cn. 18. Mai 2021, abgerufen am 19. Mai 2021 (chinesisch).