Autopilot
Als Autopilot wird eine automatische, üblicherweise programmierbare Steuerungsanlage bezeichnet, welche Fortbewegungsmittel auf Wunsch automatisch lenkt, ohne dass Menschen, während der Autopilot aktiv ist, in die Steuerung eingreifen müssen. In der Regel handelt es sich um einen Computer, der Umgebungsinformationen von den Instrumenten des Fortbewegungsmittels verarbeitet, um zu ermitteln, wie das Fortbewegungsmittel gesteuert werden soll.
Falls es zu Schwierigkeiten kommen sollte, werden optische oder akustische Warnsignale gegeben.

Definition
Der Begriff „Autopilot“ ist ein Kompositum der zwei Begriffe „Automat“ und „Pilot“.
Das Wort Pilot, welches vom französischen „pilote“[1] kommt, hat seinen Ursprung im griechischen Begriff „pedotta“[1] der frei übersetzt werden kann als Steuermann, Lotse. Heutzutage ist diese Definition jedoch nicht mehr gebräuchlich. Das Lexikon der Luftfahrt definiert einen Piloten „als ein Teil der Besatzung an Bord eines Flugzeuges“. „[Genauer handelt es] sich um den Flugzeugführer“[2] welcher das Luftfahrzeug steuert. Der Duden definiert „Pilot als jemanden der [berufsmäßig] ein Flugzeug steuert“,[3] was auch daran liegt, dass heute der Begriff hauptsächlich mit der Luftfahrtbranche in Verbindung gebracht wird. Jedoch gibt es laut Duden[4] andere Bedeutungen dieses Begriffs, z. B. Rennfahrer oder „jemanden der einen Bob lenkt“.[3] Dabei wird ein Pilot in der Seemannssprache auch als ein Lotse bezeichnet. Früher wurde der Begriff Pilot oft allgemeiner verwendet, um einen Fahrzeugführer zu bezeichnen, der ein Fahrzeug, jeder Art, steuerte.[5]
Der zweite Begriff, „Automat“, stammt vom französischen „automate“, das wiederum dem griechischen „autómatos“[6] entspringt. Übersetzt bedeutet es so viel wie „sich selbst bewegend, aus eigenem Antrieb“. Automaten sind folglich Maschinen, die vorbestimmte Abläufe selbständig, also automatisch, ausführen.
Die amerikanische Luftfahrtbehörde Federal Aviation Administration, kurz FAA, definiert einen Autopiloten als ein „[…] Flugkontrollsystem, welches automatisch das Flächen-, Höhen- und in manchen Fällen das Seitenleitwerk anspricht, um der Route, welche [vom Piloten vorgegeben wurde], zu folgen oder Höhe, Sink-/Steiggeschwindigkeit und Kurs zu befolgen“.[7]
Jedoch ist ihre Definition nur im Bereich der Luftfahrt gültig und selbst dort nicht für alle Systeme allgemein gültig. Somit ist ihre Definition nicht ganz ausreichend. Wenn man also die beiden Begriffe, wie sie oben definiert wurden, verbindet, kann man „Autopilot“ als ein System definieren, das automatisch anhand von äußeren Einflüssen und Informationen selbstständige Entscheidungen trifft und daraufhin ein Fahrzeug, sei es ein Luftfahrzeug oder eine andere Art von Fahrzeug, steuert. Damit kann es Lage, Richtung, Geschwindigkeit des Fahrzeuges beeinflussen.[8]
Anwendungsgebiete
Autopiloten werden heute in sehr vielen unterschiedlichen Bereichen und für unterschiedliche Zwecke verwendet. Dazu zählt vor allem die Entlastung des Menschen, was aufgrund von immer komplexer werdender Systeme zunehmend nötig wurde. Autopiloten werden heute meist nur mit der Luftfahrt in Verbindung gebracht, und die meisten Menschen kennen auch nur Autopiloten, die im Flugzeug Verwendung finden. Jedoch werden bereits weitere Systeme und Fahrzeuge mit einem Autopiloten ausgestattet. Abgesehen von der Luftfahrt werden Autopiloten, welche der obigen Definition entsprechen, auch in der Raumfahrt, Seefahrt, Automobilfahrt und Robotik eingesetzt, um Fahrzeuge zu steuern.[8]
Autopiloten in der Schifffahrt
Autopiloten auf Schiffen übernehmen die Steuerung nach einem festen Kurs, nach einer vorgegebenen Route (Wegpunkt-Liste) oder bei Segelschiffen nach dem Wind (Windfahnensteuerung). Auf größeren Schiffen sind sie in ein umfassendes elektronisches Navigationssystem (ECDIS) integriert.
.jpg.webp)
Der Autopilot berechnet aus verschiedenen Datenquellen die erforderliche Kurskorrektur. Gemessen wird der gesteuerte Kurs (Kompasskurs oder Kurs über Grund), der mit dem vorgegebenen Kurs über Grund verglichen wird. Aus dem Unterschied wird ein Steuersignal gebildet, das mechanisch oder hydraulisch auf die Steueranlage wirkt und über das Ruderblatt das Schiff zu einer Kursänderung bringt.
Moderne Geräte bestimmen den Kurs des Schiffes mit einem Kreiselkompass oder über GPS. Sie berücksichtigen auch Schlinger- und Schlierbewegungen durch Seegang und Windböen, Winddrehungen, Strömungen (Abdrift: Unterschied zwischen Kurs durch Wasser und Kurs über Grund) und Veränderungen des Erdmagnetfeldes. Über eine Wegpunktliste oder per Mausklick direkt auf der Seekarte können Routen eingegeben werden, die dann vom Autopiloten automatisch abgefahren werden. Beim Erreichen eines Wegpunktes erfolgt eine akustische Information, und das Gerät schaltet automatisch auf den nächsten Wegpunkt weiter.
Auf großen Schiffen ist der Autopilot ein integrierter Bestandteil in einem umfassenden elektronischen Navigationssystem (ECDIS), zu dem auch Echolot, Radar, AIS, elektronische Seekarte und vieles mehr gehören. Aufgrund der fortschreitenden Miniaturisierung und des Preisverfalls der hierzu benötigten Technik finden ECDIS-ähnliche Systeme – meist bestehend aus einem Notebook mit Navigations-Software sowie über NMEA-Schnittstellen verbundenen Peripheriegeräten – zunehmend Einzug auf kleineren Schiffen und selbst auf Fahrzeugen der Sportschifffahrt.
Schwerwiegende Folgen können falsch programmierte oder „aus dem Ruder“ laufende Autopiloten nach sich ziehen. Letzteres tritt insbesondere bei zu schwach dimensionierten Systemen auf, beziehungsweise bei besonders heftigen Wellen und Winden oder bei Segelkursen vor dem Wind, wenn die Regelautomatik zu schwach oder zu stark reagiert.
Windfahnensteuerung

Mechanische Windfahnensteuerung
Die mechanische Windfahnensteuerung nutzt eine Windfahne am Heck des Schiffes, mit der die Windrichtung relativ zum Schiff gemessen wird. Sie reagiert sowohl auf Winddrehungen (Windrichtungsänderung) als auch auf Schiffsdrehungen (Kursänderung). Diese Richtungsänderung wird mechanisch derart auf das Ruderblatt des Schiffes übertragen, dass der Winkel zwischen Schiff und scheinbarem Wind immer gleich bleibt. Dadurch fährt das Schiff bei gleich bleibender Windrichtung geradeaus. Der Kurs muss nur bei größeren Winddrehungen korrigiert werden.
Mechanische Windfahnensteuerungen werden häufig bei Weltumsegelungen genutzt. Sie sind robust und benötigen keine elektrische Energie.
Elektronische Windfahnensteuerung
Bei der elektronischen Windfahnensteuerung wird die Drehung der Windfahne auf der Mastspitze dem Autopiloten als elektrisches Signal zugeführt. Dieser berechnet dann daraus und unter Berücksichtigung des vorgegebenen und des tatsächlichen Kurses des Schiffes die erforderliche Korrektur. Bei modernen Yachten sind Windmesser, Autopilot und Navigationssystem meistens sowieso miteinander vernetzt, so dass keine zusätzliche Ausrüstung erforderlich ist, um den Autopiloten im Windfahnenmodus zu betreiben.
Pinnensteuerung

Bei der Pinnensteuerung wirkt das elektrische Steuersignal über eine elektrisch angetriebene Schubstange mechanisch direkt auf die Pinne. Die meisten sogenannten Pinnenpiloten haben einen elektronischen Kompass direkt eingebaut, so dass außer einer Stromversorgung keine zusätzliche Ausrüstung erforderlich ist, um das Schiff einen Kompasskurs folgen zu lassen. Eingänge für NMEA-Daten ermöglichen eine Regelung nach Windrichtung oder nach Wegpunkten, womit auch Strömungen und Abdrift kompensiert werden können.
Radsteuerung
Bei Schiffen mit Radsteuerung sind verschiedene Antriebsmodelle gebräuchlich. Allen gemeinsam ist, dass ein starker Antriebsmotor von einer im Cockpit befindlichen Steuereinheit angetrieben wird. Der Antriebsmotor wirkt entweder auf die Steuerseile oder aber über einen Stempel direkt auf den Ruderquadranten. Dieses System hat den Vorteil, dass bei einem Schaden in der Ruderanlage (z. B. Bruch des Steuerseils) das Schiff noch über den Autopiloten gesteuert werden kann. Auf kleineren Schiffen sind Antriebe mit Hydraulikzylindern selten, bei den Schiffen der Berufsschifffahrt aber verbreitet.
Im Automobil
Autopiloten in Kraftfahrzeugen werden in der Regel Fahrerassistenzsysteme genannt. Ein Autopilot greift per Definition in die Steuerung des Fahrzeuges ein. Einzelne Autopilotfunktionen sind zum Beispiel:
- Spurhalteassistent: Hält das Fahrzeug in der markierten Spur.
- Spurwechselassistent: Wechselt auf Befehl des Fahrers die Spur. (Achtet dabei aber i. d. R nicht auf den Verkehr).
- Kollisionsvermeidungsassistent: Warnt vor drohenden Auffahrkollisionen und bremst in Verbindung mit dem Notbremsassistenten selbständig.
- Seitenkollisionsvermeidungsassistent: Weicht seitlich aus, falls ein anderes Fahrzeug seitlich zu nahe kommt.
- Bremsassistent: Erkennt anhand der Geschwindigkeit, mit der das Bremspedal getreten wird, eine Notbremssituation und bremst dann schneller und stärker, als der Mensch es tut.
- Tempomat: Regelt die Fahrzeuggeschwindigkeit.
- Seitenwind-Assistent: Stabilisiert die Spur bei böigem Seitenwind.
- Parkassistent: Erkennt Parklücken und parkt längs oder quer ein.
Der Automatisierungsgrad eines Autopiloten wird durch Autonomiestufen von Level 0 bis Level 5 beschrieben (siehe Autonomes Fahren). Seit einiger Zeit erreichen Testfahrzeuge von Google das Level 4. Das bedeutet, dass die Fahrzeuge vollständig autonom fahren können. Zur Sicherheit und aus rechtlichen Gründen ist aber immer noch ein (verantwortlicher) Fahrer im Fahrzeug. Auch in Europa gibt es Anstrengungen, selbstfahrende Kraftfahrzeuge zu etablieren. Ein Projekt, welches schon erfolgreich in Spanien getestet wurde, ist SARTRE (Safe Road Trains for the Environment).[9] Hierbei handelt es sich um ein Konvoisystem, das automatisch alle Fahrzeuge miteinander in einem Netzwerk verbindet und diese vollautomatisch steuert. Im Test in Spanien steuerte ein LKW alle dahinter fahrenden Fahrzeuge, die alle ihre gemessenen Daten zum Steuerfahrzeug übertrugen.[8]
Ein weiterer Schritt in Richtung autonomer Steuerung ist das Highway Pilot System, das im Freightliner Inspiration Truck zum Einsatz kommt. Der Truck basiert auf dem US-Serienmodell Freightliner Cascadia Evolution, der mit dem Detroit Connect (bordeigenes Diagnose- und Flottenüberwachungssystem) und der Highway Pilot Technologie ausgestattet ist. Letztere umfasst Frontradar, eine Stereokamera sowie bewährte Assistenzsysteme (Abstands-Regeltempomat). Seit Mai 2015 haben zwei LKW dieser Art eine Lizenz für den Straßenverkehr in Nevada, USA.[10]
Tesla, Inc. bietet in seinen Fahrzeugen eine Fahrerunterstützung, die als „Autopilot“ bezeichnet wird. Es handelt sich dabei um Funktionen der Autonomiestufe Level 2. Dabei kann z. B. durch Antippen des Blinkerhebels die Spur automatisch gewechselt werden. Die Wettbewerbszentrale verklagt Tesla, da Tesla den irreführenden Eindruck erwecke, seine Wagen können autonom auf deutschen Straßen fahren.[11][12]
Raumfahrt
In der Raumfahrtbranche sind Autopiloten heutzutage nicht mehr wegzudenken. Ohne sie wäre die Erforschung und kommerzielle Nutzung des Alls nicht möglich. Autopiloten werden in Raketen, Satelliten und Sonden eingesetzt, um diese beim Start zu steuern, im stabilen Orbit zu halten und um selbstständig Planeten oder andere Objekte in den Tiefen des Alls zu erforschen. Ein Beispiel ist der Curiosity-Rover der NASA, welcher aktuell auf dem Mars im Einsatz ist.
Flugzeuge
Die stetig wachsende Komplexität von Luftfahrzeugen sowie der immer dichtere Verkehr würden ein hohes Maß an Konzentration und Arbeit vom Piloten verlangen, wenn dieser das Flugzeug manuell steuern würde. „Ein Autopilot kann hierbei den Piloten bei seiner monotonen und ermüdenden Aufgabe entlasten, das Flugzeug zu steuern […]. Der Pilot ist somit frei sich auf andere Aufgaben zu konzentrieren […]“.[13] Abgesehen von einer präzisen Steuerung des Luftfahrzeuges übernehmen Autopiloten auch andere Aufgaben und unterstützen den Piloten nicht nur im normalen Flug. Moderne Systeme sind in der Lage, die Crew bei Landungen und Starts bei schlechter Wetterlage, wie starken Winden und Nebel, zu unterstützen. Aber auch „vollautomatische Landungen bei schlechten Sichtverhältnissen bis hin zum Sichtverhältnis null“[13] (zero visibility) gehören zu den Anwendungsgebieten des Systems. Auch in modernen Hubschraubern kommen Autopiloten zum Einsatz. „Einen großen Hubschrauber […] zu steuern erfordert viel Arbeit und Konzentration von den Piloten ab, da ihnen andere Anforderungen zugrunde gelegt werden“.[14] Namentlich die Fähigkeit zum Schwebeflug stellt sehr hohe Anforderungen an Hubschrauber-Autopilotensysteme.[8]
Geschichtliche Entwicklung
Die ersten Systeme, die den Namen „Autopilot“ erhielten, wurden für die Schifffahrt entwickelt, bevor sie ihren Weg in Flugzeuge fanden. Dies begann mit der Erfindung des Kreiselkompasses durch Hermann Anschütz-Kaempfe (im Jahr 1904) und Elmer Sperry (im Jahr 1908). Diese technische Errungenschaft erlaubte es, eine verlässliche Referenz des Kurses zu erhalten. Dies war zuvor auf Schiffen, die aus Stahl gebaut wurden, aufgrund der magnetischen Eigenschaften von Ferrit mithilfe eines Kompasses schwierig. Diese Kreiselkompasse wurden schnell von der Marine übernommen. Elmer Sperry entwickelte darauffolgend das erste kreiselkompassgesteuerte automatische Steuerungssystem, welches sich schnell in der Schifffahrtbranche durchsetzte. Jedoch war Sperrys Autopilot „eine massive Einheit, welche sich nur praktikabel in der Schifffahrt anwenden ließ, […] aber setzte sich schnell als Standard auf Neubauten von Schiffen durch“[15] Elmer Sperrys Sohn Lawrence brachte die Erfindung seines Vaters schließlich ins Flugzeug. Am 18. Juni 1914 demonstrierte er in Frankreich das erste System, welches eine Curtiss C-2 ohne Einwirken eines Piloten im Horizontalflug stabil halten und stabilisieren konnte. „Dieser Autopilot bestand aus vier getrennten Kreiseln, jeder rotierte mit 7.000 Umdrehungen pro Minute. Diese Kreisel waren auf die Nulllage aller Steuerflächen eingestellt und wurden mechanisch mit ihnen verbunden“.[16] Dieser frühe Autopilot war schon damals in der Lage, Landungen ohne Einwirkung des Piloten durchzuführen.[15] In den 30er Jahren entwickelte die Fa. Siemens unter dem Label "Autopilot II" eine "automatische Flugzeugsteueranlage", die nach "vielhundertstündigen Testflügen" auch im regelmäßigen Streckenverkehr der Deutschen Lufthansa zum Einsatz kam.[17]
Durch die rasante technische Entwicklung, vor allem in der Elektronik, steuerte 1947 der erste elektronische Autopilot eine C-54 Skymaster der US Air Force über den Atlantik von den USA nach England vollkommen autonom vom Start bis zur Landung in Brize Norton.[18] Damals zeigte sich die britische Fachpresse von der Leistung des vollautomatischen Fluges nicht wirklich begeistert. Auch war schon damals klar, dass solch ein System noch eine lange Zeit brauchen würde, um sich fest zu etablieren.[19] In der Oktoberausgabe der Zeitschrift Flight and Aircraft Engineer von 1947 wurde der Autopilot als ein „glorifizierter elektrischer Wecker [beschrieben], welcher vordefinierte Einstellungen […] abarbeitete wenn eine gewisse Zeit verstrich und somit Eingaben an den Autopiloten weitergab [damit dieser das Flugzeug kontrolliert] und dazu weitere Systeme steuerte, wie das Fahrwerk, Klappen und Triebwerk“.[19] Dieses Beispiel zeigt eindrucksvoll, dass schon manche der frühesten Autopilotensysteme vieles beherrschten, was man heute von einem modernen computerisierten System erwarten würde, wie Autothrottle, Autotrim, Gierdämpfer sowie automatische Landungen.[8]
Moderne Autopiloten



Vom ersten rein mechanischen bis hin zum voll elektrischen Autopiloten wurden zunehmend voll computerisierte Systeme entwickelt, gesteuert von komplexen Algorithmen auf immer schnelleren Mikroprozessoren. Dieser Prozess begann Mitte der fünfziger Jahre mit der ersten Fly-by-wire-Technik (FBW) bei militärischen Fluggeräten, damals noch ausschließlich in den USA. In Europa begann man sich erst Ende der sechziger Jahre mit FBW zu beschäftigen, als Deutschland, Frankreich und England zusammen den PA-200 Tornado entwickelten. Von den technischen Errungenschaften und Erfahrungen bei der Entwicklung dieses Mehrzweckkampfflugzeugs profitierte der Konzern Airbus und entwickelte daraufhin den Airbus A-320, eines der ersten Verkehrsflugzeuge, das ausschließlich über FBW gesteuert wurde – das erste war die Concorde.[14]
Durch die zunehmende Computerisierung und Vernetzung wuchsen die Aufgaben des Autopiloten stetig an. Moderne Systeme, wie sie heute eingesetzt werden, helfen sogar, die Lärmbelästigung zu senken sowie Sprit zu sparen. Außerdem geht der Trend in Richtung einer zentralen Einheit statt, wie bisher, separater bzw. eigenständiger Systeme. So gab es früher getrennte Rechner für die Lageregelung, d. h. einen pro Raumachse, und einen weiteren für die Steuerung der Schubregelung des Triebwerks. Heute hingegen ist es schon üblich, dass alles auf demselben Prozessor ausgeführt wird. Solch ein zentrales System bietet einige Vorteile: So spart man Gewicht, und das Gesamtsystem kann viel komplexere Aufgaben übernehmen, da ihm mehr Daten zu Verfügung stehen. Somit können Autopiloten schon heute das Flugzeug während des gesamten Flugs, d. h. einschließlich Start und Landung, automatisch fliegen. Ein Beispiel dafür ist die Northrop Grumman X-47, ein im Auftrag der US Navy entwickeltes Experimentalflugzeug. Jedoch hat noch kein Hersteller gewagt, solch ein pilotenloses System in der zivilen Luftfahrt einzuführen.
Manche Systeme, etwa die des Herstellers Airbus, haben sogar die Befugnis, Befehle des Piloten zu übersteuern, d. h. in Notsituationen selbst Entscheidungen gegen den Piloten zu treffen. Ob dies tatsächlich wünschenswert ist, bleibt fraglich, aber ein Computer reagiert jedenfalls schneller als ein Mensch. Andererseits machen sich Fachleute Sorgen darüber, dass Piloten zunehmend zum Beobachter degradiert werden und nur im Notfall eingreifen sollen, obwohl die Computertechnik heute noch nicht perfekt ist.[8][20]
Klassifizierung
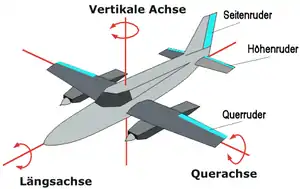
Autopiloten werden in drei Kategorien eingeteilt. Dabei wird unterschieden, um wie viele Achsen des Flugzeugs der Autopilot steuern kann. Dabei wird unterschieden zwischen
- einachsigen Autopiloten,
- zweiachsigen Autopiloten (mit oder ohne Höhenvorwahl),
- dreiachsigen Autopiloten und
- vierachsigen Autopiloten.
Beim einachsigen Autopilot steuert dieser nur die Querruder an, um die Längsachse (Hochachse) zu steuern. Dies wird auch als Rollen bezeichnet. Dabei werden nur die Flügel horizontal gehalten.
Der zweiachsige Autopilot spricht auch die Höhenruder an, um das Flugzeug um seine Querachse zu steuern (englisch pitch). Somit kann auch die Höhe im Flug gesteuert werden.
Der dreiachsige Autopilot steuert alle Steuerflächen des Luftfahrzeugs an, um dieses in allen drei Achsen zu steuern. Dabei kommt zu den anderen zwei Achsen die Gierachse hinzu (englisch yaw).
Manchmal kommt in der Fachliteratur auch der Begriff vierachsige Autopiloten vor. Jedoch wird hier nicht eine Achse im Raum bezeichnet, sondern der Schubvektor als vierte Achse gezählt. Solche Systeme können den Schub der Triebwerke gezielt steuern, um eine festgelegte Geschwindigkeit zu halten oder automatisch den Schub während der Landung zu regeln.
Einachsige Autopiloten


Die einfachste Form des Autopiloten ist der einachsige Autopilot, auch als „wing leveller“ (sinngemäß auf Deutsch: „Tragflächen horizontal ausrichten“) bekannt. Er kontrolliert nur die Drehung um die Längsachse (Rollachse) – das Rollen. Er kann die Tragflächen horizontal halten, indem er das Querruder steuert. Der einachsige Autopilot hat nur den Horizontalmodus. Mit dem Querruder sind nur Richtungsänderungen möglich, nicht jedoch eine Änderung der Flughöhe.
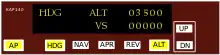
Ein weit verbreiteter Autopilot für Kleinflugzeuge und Zweimots ist der Bendix/King KAP 140. Seine Modellvariante als einachsiger Autopilot hat fünf Bedienknöpfe. Mit der Taste AP (für: Autopilot) wird der KAP 140 eingeschaltet. Dabei ist der ROL-Modus (Rollmodus) aktiviert, der die Tragflächen in horizontaler Position hält. So kann das Flugzeug nicht zur Seite abkippen. Wenn der Pilot vorher eine angemessene Geschwindigkeit eingestellt hat und das Flugzeug ausgetrimmt ist, fliegt es in einem sehr stabilen Zustand.
.jpg.webp)
Die vier weiteren separat einzuschaltenden Modi sind:
- HDG (Heading; zum Erfliegen und Halten eines am Kurskreisel eingestellten Kurses)
- NAV (Navigation; zum Erfliegen und Halten eines am VOR oder GPS eingestellten Kurses)
- APR (Approach; Anflug; wirkt wie NAV-Modus, ist jedoch deutlich empfindlicher, so dass ein sehr genauer Landekurs geflogen werden kann)
- REV (Reverse; Umkehrkurs; wirkt wie APR-Modus, jedoch reagiert der Autopilot auf die Ausschläge der Kursnadel genau andersherum; dieser Modus wird bei vielen Autopiloten auch als BC – back course, Umkehrkurs oder Rückseitenkurs – bezeichnet)
Die vier Tasten – HDG, NAV, APR, REV – werden durch Drücken aktiviert und durch erneutes Drücken deaktiviert. Es kann jeweils nur eine der vier Tasten aktiviert sein. Sind alle vier Tasten deaktiviert, dann fällt der Autopilot zurück in den ROL-Modus – sofern der Autopilot eingeschaltet ist. Der ROL-Modus ist allen Modi des einachsigen Autopiloten gemeinsam.
Zweiachsige Autopiloten
Zweiachsige Autopiloten kontrollieren zusätzlich zur Rollachse die Pitchachse, also das Nicken um die Querachse. Sie können das Flugzeug zusätzlich um die Querachse nicken lassen (eng. pitching) – die Nase des Flugzeuges wird angehoben oder gesenkt. Mit dieser zweiten Achse des Autopiloten ist eine Höhensteuerung möglich, der vertikale Modus. Dazu steuern sie ein Pitch-Servo und ein Pitch-Trim-Servo an.
Einachsige Autopiloten können das Flugzeug nur seitlich steuern (laterale Navigation), während zweiachsige Autopiloten das Flugzeug seitlich und in der Höhe (vertikale Navigation) steuern können.
In einfacher Ausführung ist der zweiachsige Autopilot ein „wing leveller“ mit der begrenzten Fähigkeit, die Abweichungen um die Querachse, also das Nicken, zu korrigieren. Am anderen Ende der Produktskala von zweiachsigen Autopiloten gibt es sehr komplexe Ausführungen, die für die automatische Flugführung geeignet sind, wobei die Empfangssignale der Radionavigationsempfänger an Bord (VOR, NDB, GPS) ausgewertet werden.
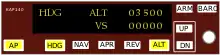
Der KP 140 hat neben den vier Tasten für die horizontalen Modi (HDG, NAV, APR, REV) noch eine fünfte Taste für den vertikalen Modus – ALT (Altitude; Höhe). Bei aktivierter ALT-Taste hält der Autopilot die aktuelle Flughöhe bei.
Durch Drücken der Taste UP (hoch) wird ein Steigflug mit etwa 500 ft/min eingeleitet, der so lange beibehalten wird, wie die Taste gedrückt wird. Entsprechend erfolgt beim Drücken der DN-Taste (Down, runter) ein Sinkflug.
Weiterhin gibt es zweiachsige Autopiloten mit Höhenvorwahl, womit sich eine Flughöhe vorgeben lässt. Auch die vertikale Geschwindigkeit, mit der das Flugzeug zu dieser Flughöhe fliegt, lässt sich einstellen. Im Approach-Modus (Anflug) kann der Autopilot dem ILS-Gleitpfad vertikal folgen.
Das Modell des KAP 140 mit Höhenvorwahl hat zusätzlich einen zweiteiligen Drehschalter zur Eingabe der Höhe und die Tasten ARM und BARO.
Da der Autopilot bei diesen Modellen nicht den Schubhebel kontrolliert, muss der Pilot weiterhin diese Aufgabe übernehmen. Beim Anflug muss er die richtige Anfluggeschwindigkeit kontrollieren. Beim Steigflug muss er darauf achten, dass der Autopilot das Flugzeug nicht mit einer zu großen Steiggeschwindigkeit in einen Strömungsabriss steuert. Die Kontrolle und Aufmerksamkeit des Piloten sind also weiterhin erforderlich.
Noch besser ausgestattete Autopiloten bieten zusätzlich zur Höhenvorwahl noch eine Höhenwarnung, die 1000 bzw. 100 ft vor dem Erreichen einer voreingestellten Flughöhe ein akustisches oder optisches Warnsignal für den Piloten gibt.
Aufbau moderner Autopiloten
Die modernen Systeme, die umgangssprachlich als Autopilot bezeichnet werden, sind eigentlich eine Vielzahl von verschiedenen teilweise unabhängig voneinander agierenden Systemen innerhalb eines Flugzeuges. All diese Systeme zusammen werden meist von Laien als Autopilot bezeichnet, jedoch trägt nur ein System von diesen zusammengefassten Subsystemen den Namen Autopilot. Aufgrund der Komplexität des Systems und der Tatsache, dass auch andere Subsysteme autonome Entscheidungen treffen, die das Flugzeug steuern, ist diese Tatsache jedoch nicht verwunderlich. Die Architektur dieses Systems ist auch nicht einheitlich, da jeder Hersteller eigene Schwerpunkte und Ansätze bei der Implementierung von Avionik-Systemen setzt. „Es gibt [daher] manchmal etwas Verwirrung im Bezug auf die Wechselbeziehungen zwischen der primären Flugsteuerung, dem Autopilot/Flight Director System (AFDS) und dem Flight Management System (FMS)“.[21] Unter die primäre Flugsteuerung fallen das FBW sowie sämtliche andere Komponenten die benötigt werden, um das Fluggerät zu steuern. Das Auto Flight System (AFS) hingegen beinhaltet sämtliche Funktionen zur automatischen und autonomen Flugsteuerung. Das FMS ist für die Navigation und Flugleistungsdaten verantwortlich.[8]
Auto Flight System (AFS)
Das „Avionik System Autopilot“ ist heute ein Teilsystem des „Auto Flight System“ (AFS), welches in der englischen Literatur als „Autopilot“ oder „Flight Director System“ (AFDS)[21] bezeichnet wird. Dieses System umfasst neben den Autopiloten auch weitere Subsysteme. Je nach Hersteller sind jedoch gewisse Systeme auch außerhalb des AFS angebracht oder in andere Systeme integriert. Vor allem in der englischsprachigen Fachliteratur wird meist nur die Architektur des Herstellers Boeing beschrieben, welcher einen etwas anderen Aufbau als bei Airbus hat.
Das AFS ist das eigentliche Herzstück des autonomen Fliegens in modernen Maschinen. Hierbei übernehmen einzelne Systeme verschiedene Aufgaben, um das Flugzeug in einem stabilen Flug zu halten oder um einem festgelegten Kurs zu folgen. Dieses System ist fest integriert in das Fly-by-wire-System. Das AFS besteht aus mehreren Teilsystemen, die teilweise als eigene selbstständige Einheiten agieren können. Diese können auch von den Piloten nach Belieben ein- bzw. ausgeschaltet werden, um so Teilaufgaben an das AFS zu übergeben. Somit kann der Pilot mit dem Flugzeug einen Kurvenflug einleiten und das AFS die Flughöhe regeln lassen. Der Pilot braucht sich nicht mehr darum zu kümmern, die gewünschte Flughöhe zu halten, da dies der Computer für ihn übernimmt.[8]
Autopilot
Je nach System, welches integriert wurde, unterscheidet man zwischen mehreren Typen von Autopiloten (AP). Diese werden je nachdem, wie viele Achsen sie kontrollieren, kategorisiert.[22] Die einfachsten AP regeln die Fluglage nur um die Roll-Achse durch Ansteuerung der Ailerons. "Diese einfachen Systeme werden auch oft „wing leveler“ genannt".[22] Eine Ebene höher gibt es noch AP mit zwei Achsen, hier kommt neben der Rollachse noch die Gierachse zum Regelkreis des AP hinzu. Diese Systeme können somit auch einen festen Kurs halten und folgen. Die letzte Kategorie von AP sind Systeme, die das Flugzeug um alle drei Achsen steuern können. Hier kommt die Nickachse hinzu, welche die Flughöhe, Steig- und Sinkgeschwindigkeit bestimmt. Diese Systeme werden in allen modernen Airlinern verwendet, da sie eine autonome Landung ermöglichen.
Der AP ist ein essentielles Avioniksystem, da es das Flugzeug präzise in einer stabilen Fluglage hält. Das System besteht aus zwei Regelkreisen.[21] Der innere Regelkreis, Inner Loop, ist verantwortlich für eine stabile Fluglage. Hierbei erhält der AP-Computer Daten, in diesem Beispiel vom Höhensensor. Ist eine Abweichung zur gewünschten Flughöhe gegeben, so steuert der Computer die Aktuatoren der jeweiligen Steuerfläche an; zum Beispiel (siehe Abbildung) das Höhenruder. „Ein Feedback vom Aktuator gewährleistet, dass die Servomotoren die gewünschte Position erreichen und halten“.[21] Durch die Bewegung der jeweiligen Steuerflächen ändert sich die Lage des Flugzeuges, was wiederum vom jeweiligen Sensor aufgenommen wird, aerodynamischer Feedback, und wieder an den AP-Computer weitergeleitet wird. Manuelle Eingaben des Piloten werden direkt an den AP-Computer gesendet und überschreiben somit die geltenden Bedienungen des Systems, so kann der Pilot jederzeit eingreifen. Ein schematischer Aufbau des inneren Regelkreises ist in der Abbildung zu sehen, dieser ist jedoch nicht allgemeingültig und hängt von der verwendeten Fachliteratur ab. Ein Beispiel ist bei Civil Avionics Systems von Ian Moir und Allan Seabridge zu sehen. Hierbei greift die manuelle Steuerung direkt die Steuerflächen an vorbei an den AP-Computern.[21] Dieser innere Regelkreis ist für alle drei Achsen gleich, nur die angesteuerten Flächen und Sensoren sind anders. Der zweite Regelkreis ist der äußere Regelkreis, Outer Loop. Dieser erzeugt die Kommandos für den inneren Regelkreis. Somit ist der Outer Loop nicht zuständig für eine stabile Fluglage, sondern erzeugt die Befehle, die nötig sind, um das Luftfahrzeug so zu steuern, dass es einem gewünschten Kurs folgt oder das gewünschte Manöver ausführt. Die nötigen Berechnungen, die dafür nötig sind, werden vom Flight Director (FD) erzeugt.[7] Im Folgenden bekommt der AP-Controller die Daten der jeweiligen Sensoren und vergleicht diese mit den gewünschten, wie in diesem Beispiel den Kurs. Der Computer erhält Daten des aktuellen Kurses und vergleicht diese mit den gewünschten. Ist ein Kursfehler zu erkennen, errechnet der FD welches Manöver nötig ist, um diesen zu korrigieren. Die nötigen Befehle für das Manöver werden dann an den AP-Computer über den Controller weitergeleitet. An diesem Punkt übernimmt der innere Regelkreis alle weiteren Befehle und spricht die benötigten Aktuatoren der jeweiligen Steuerflächen an. Neben Kurs können auch Sink- bzw. Steiggeschwindigkeit und Höhe dem System mitgeteilt werden. Diese erlauben dem System das Flugzeug um alle drei Achsen stabil in der Luft zu halten.[8]
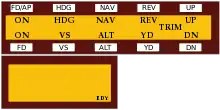
Flight Director

„Der Flight Director (FD) ist das Gehirn des Autopiloten-Systems“.[7] Die meisten Autopiloten können eine stabile Fluglage garantieren; kommen jedoch andere Faktoren ins Spiel wie Navigation, Wind und Kurs so sind komplexere Berechnungen notwendig. „Der FD und AP sind so entworfen, dass diese sehr eng zusammenarbeiten, jedoch ist es möglich den FD zu benutzen, ohne den AP zuzuschalten und umgekehrt“.[7] Der FD und Autopiloten werden als getrennte Systeme betrachtet, man kann aber auch beide Systeme als ein einheitliches System betrachten. Bei ausgeschaltetem Autopiloten und aktiviertem FD wird den Piloten auf ihrem Primary Flight Display (PFD) durch Symbole gezeigt, wie sie das Flugzeug manuell steuern sollen, um eine gewünschte Flugroute oder Manöver zu folgen. „Es erzeugt eine einfache interpretierbare Anweisung für den Piloten“.[7] So wird auf dem PFD die gewünschte Position der gewünschten Fluglage schematisch abgebildet, meist als großes Kreuz in Rot oder einer anderen auffälligen Farbe. Somit muss man nur das Flugzeug so steuern, dass dieses über der dargestellten Position liegt. Der Pilot muss dabei das Flugzeug manuell steuern, dies macht das Fliegen jedoch nicht einfacher, da „dem FD mitgeteilt werden muss, was passieren soll und dieser zeigt dann an wie zu fliegen ist“.[7] Die FAA empfiehlt daher den FD zu deaktivieren[7] und per Instrumentenflug zu fliegen, da dies weniger Arbeitsbelastung mit sich bringt. Befinden sich beide Systeme in einem Flugzeug, so ist es auch möglich je nach System den AP ohne FD zu aktiveren.[8]
Stability Augmentation System
In modernen AP-Systemen ist auch immer ein weiteres System für eine bessere stabile Fluglage integriert, das „Stability Augmentation System“. Dieses ist eigentlich eine Zusammenfassung von zwei autonomen Systemen, dem Autotrimsystem und dem Yaw-Damper. Wo früher zwei physikalisch getrennte Systeme zu finden waren, sind diese heute fester Bestandteil des Autopiloten.[8]
Autotrimsystem
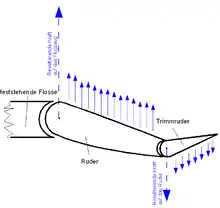
„Um einen Flugzustand […] über einen längeren Zeitraum aufrechtzuerhalten, muss stets ein Kräfte- und Momentengleichgewicht am Flugzeug herrschen“.[23] Dieses Gleichgewicht muss beim Flug andauernd nachjustiert werden, da es aufgrund von Treibstoffverbrauch zu einer Änderung des Schwerpunktes kommt. Um nicht andauernd dies durch manuelle Steuereingaben auszugleichen, gibt es die Trimmung. Hierbei werden kleine Steuerflächen – sogenannte Trimmruder oder auch Trimmklappen genannt – am jeweiligen Ruder angewinkelt. Diese erzeugen eine aerodynamische Kraft, um das gewünschte Kräftegleichgewicht wiederherzustellen. Um dies nicht manuell vom Piloten über die gesamte Flugzeit durchführen zu lassen, gibt es das Autotrimsystem. „Das Autotrimsystem ist in der Lage, automatisch […] Justierungen zur Pitch-Trimmung durchzuführen um das Flugzeug auf der gewünschten Höhe zu halten […]“.[7] Dieses System wird wiederum vom Autopiloten gesteuert und kontrolliert, sobald der Computer erkennt, dass, um eine gewünschte Fluglage zu halten, ein andauernder Ausschlag der Steuerflächen nötig ist. So steuert dieser die Trimmruder, um dies auszugleichen und die Steuerflächen in ihre neutrale Lage zurückzuführen. Das ist wünschenswert, um den Widerstand zu verringern. Abgesehen von einer Trimmung über Trimmruder gibt es auch das Verfahren zur Gewichtstrimmung von Airbus.[23] Hierbei werden keine Trimmruder verstellt, um ein Kräftegleichgewicht herzustellen, sondern Treibstoff von einem Tank zu einem anderen umgepumpt, um dem Schwerpunkt des Flugzeuges im Flug zu verschieben. Dies hat einen Vorteil, da es zu keinem zusätzlichen Luftwiderstand von den Trimmrudern kommt. Somit erhöht man die Reichweite, aber verringert die Längsstabilität, da man Treibstoff aus den Flügeltanks entnimmt.[8]
Yaw Damper
Das zweite System zur Verbesserung der Stabilität ist der Yaw-Damper oder auch Gierdämpfer. Dieses System hat nur die eine Aufgabe, die sogenannte Dutch-Roll-Schwingung zu dämpfen, die vor allem bei großen Flugzeugen auftritt. Diese wird durch Böen erzeugt, die das Flugzeug von der Seite treffen. Da das Leitwerk eine große Angriffsfläche bietet, entsteht ein Drehmoment um die Hochachse. Die darauffolgende Kette von Ereignissen erzeugt dann die „Dutch Roll“-Schwingung. Diese ergibt eine Sinuswelle um die Hochachse. Jedes Luftfahrzeug hat seine eigene „Dutch Roll“-Frequenz. Würde kein Ausgleich erfolgen, um dieser entgegenzuwirken, so würde das Flugzeug die Schwingung weiter ausführen und auch an Höhe verlieren. Dieses Schwingungsverhalten ist besonders für Passagiere unangenehm und verlangt den Piloten viel Arbeit ab, um diese auszugleichen.[13] Der Yaw-Damper übernimmt somit diese Aufgabe und lenkt das Seitenruder so aus, dass es schon gar nicht zu solch einer Schwingung kommt. Zur Erkennung dieser Schwingung erhält der Computer die Yaw-Rate-Signale des Flugzeuges. Diese werden durch einen Bandpassfilter gefiltert, um die flugzeugspezifische Dutch-Roll-Frequenz zu erkennen. Dies ermöglicht, auch einen Kurvenflug von dieser zu unterscheiden. Sobald der Computer erkennt, dass eine Dutch-Roll-Schwingung vorliegt, steuert er die Servomotoren des Seitenruders an, um dieser entgegenzuwirken. Meist ist der Yaw-Damper teilweise bis vollständig im AP-Computer integriert. Dies muss nicht unbedingt der Fall sein, so ist bei der A320 der Yaw Damper ein eigenständiges System, das außerhalb des AP-Systems liegt.[8][21]
Auto Throttle System
Ein weiteres wichtiges System der autonomen Flugregelung ist das „Auto Throttle System“ (ATS) oder auch „Auto Thrust System“. Dieses System regelt die Triebwerke so, dass diese jederzeit den nötigen Schub, welcher zur jeweiligen Fluglage benötigt wird, erzeugen. Die Vorgaben dafür werden durch den Autopiloten erzeugt und an die Triebwerke weitergegeben. Das ATS bietet eine Vielzahl von Vorteilen und entlastet die Piloten vor allem bei Start und Landungen, wo sie sich nicht mehr um die Triebwerksleistung kümmern müssen. Heutzutage befinden sich noch zwei unterschiedliche Systeme in Verwendung. In manchen älteren Maschinen findet man noch das klassische ATS. Hierbei wird das Triebwerk nicht direkt vom AP angesteuert,[21] sondern dieser steuert einen Servomotor an, welcher die Schubhebel im Cockpit mechanisch verstellt.[23] Die Schubhebel stellen somit die Verbindung zu den jeweiligen Reglern des Triebwerks her. Diese überwachen und steuern sämtliche Vorgänge des Triebwerks, um die geforderte Leistung zu bringen. Diese Regler sind hochkomplexe feinmechanische Computer verbunden mit einer elektronischen Steuerung.[23] Aufgrund ihrer Komplexität und mit steigender Digitalisierung, vor allem durch reine FBW-Systeme, verschwinden diese langsam. „Moderne Triebwerke […] werden [heute] mit einem digitalen elektronischen Triebwerksregelsystem FADEC (full authority digital engine control) ausgerüstet“.[23] Diese Systeme arbeiten nun nicht mehr mithilfe mechanischer Schnittstellen, sondern rein digital. „Ihre Aufgaben gehen weit über die Regelung hinaus […] und sorgen immer für die optimale Leistung oder optimalen Schub bei maximaler Wirtschaftlichkeit“.[23] Bei der Verwendung des FADEC-Systems haben die Piloten jedoch keine Eingriffsmöglichkeit in das Betriebsverhalten der Triebwerke. Hier werden nur die Eingangsgröße des AP und der Schubhebel verwendet. In einem geschlossenen Regelkreis wird dann über die jeweiligen Sensoren innerhalb des Triebwerkes, welches Daten wie Temperaturverteilung, Druck, Abgastemperatur und Drehzahl liefert, der Treibstoffzufluss geregelt. An diese Systeme werden sehr hohe Anforderungen gestellt, da sie der rauen Umgebung am Triebwerk standhalten müssen. Je nach Triebwerk und Aufbau müssen diese sogar Temperaturen zwischen −60 °C und 120 °C verkraften.[23] Auch Ausfallsicherheit ist bei ihnen von sehr hoher Bedeutung, da ihr Versagen zu einem totalen Triebwerksausfall führen würde.[8]
Flight Management System
Das Flight Management System (FMS) ist für einen wichtigen Teil des Fluges verantwortlich, die Navigation. Das FMS erleichtert den Piloten die Planung ihrer Flugstrecke und berechnet aus mehreren Sensoren die aktuelle Position. In früheren Systemen musste der Pilot alle Wegpunkte seines geplanten Fluges manuell eingeben. Dies führt jedoch immer wieder zu Falscheinträgen und somit zu Kursabweichungen. Gekoppelt mit einer ungenauen Positionsbestimmung war dies nicht vorteilhaft. Schon 1976 träumten Visionäre der Avionik-Industrie von einem „Master Navigation System“, das autonom das Flugzeug durch sämtliche Phasen des Fluges navigieren kann.[24] Ab 1982 wurde dann das FMS eingeführt. Das FMS beinhaltet eine Datenbank mit Wegpunkten und Prozeduren, die benötigt werden, um eine Flugroute zu planen. Der Pilot wählt somit nur noch die Punkte aus, die er anfliegen möchte und erstellt somit seinen Flugplan. „Der Computer errechnet dann die Distanz und Kurs für jeden dieser Punkte, welche auf der Flugroute liegen“.[24] Mithilfe aller Informationen „[…] stellt das FMS eine präzise Navigation zwischen jedem Paar von Wegpunkten während des Flugs bereit und gibt in Echtzeit weitere Informationen zum Flug, wie Geschwindigkeit über Grund, Distanz, erwartete Flugzeit, Kerosinverbrauch und maximale Zeit in der Luft“.[24] Jedoch ist das FMS nicht nur dazu da, die Planung zu erleichtern, sondern gibt auch sämtliche benötigten Informationen an den AP und das Autothrottle-System weiter. Hier sieht man die eigentliche Aufgabe des FMS für das AFS. Es errechnet den nötigen Kurs und die Höhe, die der Autopilot halten muss, um der gewünschten Flugroute genau zu folgen. Sobald ein Wegpunkt erreicht wurde, wird dem AP ein neuer Kurs mitgeteilt, welchem dieser dann folgt. Moderne Systeme erlauben eine autonome Navigation um alle drei Achsen und Anpassung der Fluggeschwindigkeit. Diese Systeme können sehr genaue Berechnungen durchführen und erlauben es, einen Wegpunkt in einem sehr kleinen Zeitfenster von ca. ± 6 s[21] zu erreichen. Außerdem können sie auch die Triebwerke ansteuern, um eventuelle Verzögerungen auszugleichen. Das FMS steuert aber nicht nur Navigation, sondern stellt auch die nötigen Receiver im Flugzeug auf die jeweiligen Frequenzen, zur Kommunikation und Leitstrahlfrequenzen, ein. Das FMS besteht im Ganzen aus zwei redundanten Computern, die sämtliche Berechnungen durchführen. Bei der A320 ist das FMS noch ein eigenständiges System mit eigenem Computer. Aber je mehr die Fly-by-wire-Systeme und Digitalisierung im Flugzeug fortschreiten, desto mehr verschmelzen einzelne Systeme. So findet sich in der Familie der A330 und A340 der AP und FMS in einem System.[14] Und in der neuesten Generation, wie der A380, sind sämtliche Systeme des AP im FMS-Computer untergebracht und bilden ein ganzes System.[8][14]
Flight Envelope Protection
Alle Systeme im AP müssen natürlich überwacht werden, und falls abnormales Verhalten eintritt, muss dies den Piloten kenntlich gemacht werden, damit diese eingreifen können.[25] Diese Aufgabe übernimmt das Flight Envelope Protection System. Dieses System ist ein fester Bestandteil des FBW. Es gewährleistet einen sicheren Flug in den Grenzbereichen des Flugzeuges. So wird sichergestellt, dass keine strukturellen Schäden durch zu hohe Beschleunigungskräfte auftreten.[25] Dies erhöht die Sicherheit während des Flugs, da Fehler in einem Computer im Idealfall nicht zu einem Ausfall eines Systems oder der Struktur führen können.[8]
Landung mit Autopilot
Eine Landung mit Autopilot auf der Landebahn und das anschließende Ausrollen auf der Landebahnmittellinie wird als CAT-III-Landung oder Autoland bezeichnet. Eine CAT-III-Landung erfordert ein entsprechend ausgerüstetes und zugelassenes Flugzeug, eine dafür geschulte und zugelassene Besatzung und einen entsprechend ausgerüsteten und zugelassenen Flugplatz. CAT-III-Landungen dürfen, abgesehen von bestimmten Flugzeugmustern, nur noch mit dem Autopiloten aufgrund dessen etwa viermal höherer Reaktionsgeschwindigkeit geflogen werden. Derzeit sind Landungen nach CAT IIIa und IIIb möglich. CAT IIIc umfasst zusätzlich zum Abbremsen auf der Bahn noch das Abrollen von dieser.
Standardtätigkeiten des Autopiloten
Wenn das Flugzeug nach dem Start bis zur gewünschten Höhe gestiegen ist, geht es in den horizontalen Reiseflug über.
Solange sich das Flugzeug unter konstanten inneren und äußeren Bedingungen (Gewichtsverteilung, Erdatmosphäre usw.) geradeaus bewegt, bleibt die Flughöhe konstant. Das Flugzeug wird jedoch schon durch den Verbrauch von Treibstoff leichter und beginnt zu steigen. Deshalb wird die barometrische Höhenmessanlage bald eine Abweichung von der vorgewählten Höhe feststellen. Der Pitchkanal, der den Anstellwinkel regelt, gibt an das Höhenruder ein Signal zur Ausregelung der Differenz, bis die als Sollwert vorgegebene Höhe wieder erreicht ist. Da durch den Gewichtsverlust der Auftrieb und deshalb der Anstellwinkel verringert werden kann und somit der Widerstand sinkt, steigt die Fluggeschwindigkeit, weshalb nun der Geschwindigkeitskanal (Auto Throttle Computer) die Motorleistung so nachregelt, dass die vorgewählte Höhe bei der ebenfalls vorgewählten (optimierten) Sollgeschwindigkeit eingehalten wird.
Die Flugrichtung wird über den Rollkanal geregelt. Angenommen, der Pilot stellt 315° als Kurs ein, also genau nach Nordwesten. Ändern sich die Außenbedingungen, wie zum Beispiel die Windrichtung, wird das Flugzeug aus dem berechneten Kurs abdriften, wenn nicht gegengesteuert wird. Eine Kompassanlage misst nun die Abweichung vom vorgewählten Kurs und gibt zum Ausgleich ein Signal an die Querruder – das Flugzeug kippt ein wenig (dreht sich seitlich um die Längsachse). Das Seitenruder arbeitet wie ein Falschkiel und das Flugzeug dreht sich zusätzlich um die Hochachse, bis der Kurs 315° wieder anliegt. Danach steuert der Rollkanal wieder in eine mittlere Lage. Während der seitlichen Bewegung hatte das Flugzeug aber einen höheren Widerstand und nahm dadurch die Nase nach unten – worauf sofort der Pitchkanal angesprochen und die Nase wieder nach oben gesteuert hatte. Auch diese Korrektur hatte zusätzlichen Widerstand verursacht und die Fahrt verringert, weshalb der Fahrtregler die Motorleistung wieder erhöhen musste.
Über diese Standard-Routinen hinaus gibt es eine große Zahl weiterer Regelfunktionen, die unerwünschte Bewegungen abfangen und den Passagieren den Flug angenehmer machen. Die Piloten wiederum können sich in anspruchsvollen Flugphasen – wie etwa vor der Landung oder bei Planänderungen durch die Flugsicherung – ihren Tätigkeiten widmen, ohne das Flugzeug dauernd nachsteuern zu müssen.
Positionsbestimmung
Die Position liest ein moderner Autopilot aus einem Inertialen Navigationssystem (INS) aus und zusätzlich, soweit empfangbar, aus mehreren Drehfunkfeuern (sog. VOR-Stationen) und immer häufiger auch aus GPS-Signalen. Besonders über Ozeanen stand vor der GPS-Ära nur das INS zur Verfügung. Mit dem Fortschreiten der Flugdauer sammelte sich ein Positionsfehler im INS. Zur Fehlerreduzierung hatte das INS ein Karussell-System, das sich jede Minute drehte, so dass die Fehler in verschiedene Richtungsvektoren geteilt wurden und sich so gegenseitig aufhoben. Die Messfehler der Gyroskope, welche die Positionsdaten immer mehr verfälschen, werden als Drift bezeichnet. Dieser Fehler beruht auf den physikalischen Eigenschaften des Systems, unabhängig davon, ob es sich um mechanische Gyroskope oder Lasergyroskope handelt.
Mittels digitaler Datenverarbeitung und eines 6-dimensionalen Kalman-Filters werden die Diskrepanzen zwischen beiden aufgelöst. Die sechs Dimensionen sind Längengrad, Breitengrad, Flughöhe, Querneigungswinkel (Rollneigung), Nickwinkel und Gierwinkel.
Auf vielen transozeanischen Flugrouten muss das INS eine bestimmte Positionsgenauigkeit gewährleisten (englisch performance factor). Deshalb wird im Flug auch die Größe des möglichen Positionsfehlers überwacht. Je länger der Flug dauert, umso größer wird der Fehler, der sich im System kumuliert. In Landnähe kann dann die Flugzeugposition mit Zusatzinformationen von Radionavigationsanlagen (VOR, VOR/DME) aktualisiert werden, außerhalb der Reichweite von VORs kann die Position über GPS korrigiert und aktualisiert werden. Das primäre System zur Positionsbestimmung bleibt aber das INS, da es als unabhängiges Bordsystem am sichersten ist und nur vom eigenen System abhängt (Software, Stromversorgung). Das INS kann zwar immer ungenauer werden, aber es kann nicht von außen abgeschaltet werden, während VOR oder GPS durch deren Betreiber abgeschaltet werden können.
Das INS besteht meist aus drei IRUs (also die Gyroskope), die als Eingabegröße lediglich die Schwerkraft und die Erdrotation benötigen. Vom Piloten muss die Anfangsposition des Flugzeuges in das System eingegeben werden.
Computersystem
Die Hardware eines Autopiloten für ein typisches großes Flugzeug besteht aus fünf 80386-CPUs, dabei ist jede CPU auf einer eigenen Leiterplatte. Die 80386-CPU ist preisgünstig, hat ein ausgereiftes Design und ist durchgetestet. Auf dem 80386 kann ein echter virtueller Computer implementiert werden. Neuere Versionen sind sogar strahlenresistent und für die Verwendung in der Luftfahrt zusätzlich verstärkt. Es wird bewusst auf das sehr alte Design der 80386 zurückgegriffen, da es zuverlässig ist und sein Softwareverhalten ausführlich getestet und beschrieben ist.
Das Betriebssystem des Kunden stellt eine virtuelle Maschine für jeden Prozess zur Verfügung. Die Software des Autopiloten kontrolliert die Elektronik des Computers also immer über den Umweg und nie direkt, stattdessen steuert sie die Softwaresimulation, die auf der 80386-CPU abläuft.
Die meisten schwerwiegenden fehlerhaften Softwareoperationen führen zu einem Systemabsturz der jeweiligen CPU.
Meist läuft auf jeder CPU ein Prozess mit niedriger Priorität, der kontinuierlich den Computer testet. Prinzipiell läuft jeder Prozess im Autopiloten in identischer Form als Kopie an drei oder mehr Stellen in verschiedenen CPUs ab. Das System entscheidet dann, welche der Ergebnisse akzeptiert werden. Dabei wird der Mittelwert übernommen, wobei extrem abweichende Werte verworfen werden.
Bei einigen Autopiloten kommt als zusätzliches Sicherheitsmerkmal noch ein unterschiedliches Design (englisch design diversity) hinzu. Dabei werden kritische Softwareprozesse nicht nur auf verschiedenen Computern ausgeführt, sondern auf jedem Computer läuft Software, die von verschiedenen Entwicklungsteams erstellt wurde, da es nicht sehr wahrscheinlich ist, dass verschiedene Entwicklungsteams den gleichen Fehler machen. Wegen der Zunahme der Komplexität der Software und der steigenden Kosten für die Software rücken aber viele Entwicklungsfirmen von dieser Sicherheitsvorkehrung durch Diversität ab.
Stand der Technik und Ausblick
Bei modernen „Fly-by-Wire“-Systemen (Tornado, Airbus, F-16, Eurofighter) verschwimmen die Grenzen der einzelnen Systeme. Moderne, wegen ihrer Agilität instabil konzipierte Kampfflugzeuge können ohne Rechnerunterstützung nicht mehr geflogen werden. Zusätzlich wird durch die implementierten Flugsteuerungssysteme eine Einhaltung des Flight Envelopes erzwungen. Eine Überschreitung der physikalischen Grenzen (Aerodynamik und auch strukturelle Belastungen) wird dadurch weitgehend unterbunden. Die Umsetzung von unbemannten Flugzeugen ist heute schon Realität. Allerdings scheitern diese Systeme an ihren noch recht eingeschränkten Einsatzmöglichkeiten. Spezielle Manöver (Aufklärung, Übernahme von einzelnen Flugphasen wie „Cruise“ oder sogar die vollautomatische Landung) sind bei entsprechender Peripherie aber heute schon Stand der Technik.
Autopiloten in der Militärluftfahrt
In der Militärluftfahrt werden heute Autopiloten verwendet, die ein Abfangen aus einem unkontrollierten Flugzustand auf Knopfdruck ermöglichen, so beim Eurofighter Typhoon. Dies kann manchen Verlust an Mensch und Material verhindern helfen und erhöht zudem die Überlebenschance in einer Gefechtssituation.
„Automatische Terrainverfolgung“ (häufiger „Terrain Following Radar“ (TFR) genannt) ermöglicht Tiefflug und Tiefstflug.[26]
Siehe auch
- Boeing X-45 Unmanned Combat Aerial Vehicle (UCAV).
- Unbemanntes Fahrzeug
- Lenkautomatik der V1 und A4/V2
- Irmgard Lotz lieferte Beiträge zur Regelungstechnik der Autopiloten
Einzelnachweise
- Lexikon der Luftfahrt, 3. Auflage: Niels Klußman, Armin Malik, Springer Verlag 2012
- Dudens
- Wortschatz (Memento vom 18. Januar 2015 im Internet Archive)
- Advanced Avionics: Federal Aviation Administration, US Dep of Transportation 2009, (S.G-2), übersetzt aus dem englischen
- Der Autopilot, eine kurze Einführung: Nikolai Reed, Universität Würzburg 2013, PDF, (mit Zustimmung des Autors überarbeitet)
- The SARTRE Project (Memento vom 27. November 2010 im Internet Archive)
- Weltpremiere auf US-Highway: Daimler Trucks bringt ersten autonom fahrenden Lkw auf öffentliche Straßen (Seite nicht mehr abrufbar, Suche in Webarchiven) Info: Der Link wurde automatisch als defekt markiert. Bitte prüfe den Link gemäß Anleitung und entferne dann diesen Hinweis.
- Your Autopilot has arrived – Tesla Motors Deutschland. In: teslamotors.com. 14. Oktober 2015. Abgerufen am 6. Juli 2016.
- Wegen „Autopilot“-Werbung: Wettbewerbszentrale verklagt Tesla. ISSN 0174-4909 (faz.net [abgerufen am 29. Oktober 2019]).
- Introduction to Avionics System, 2. Auflage: Collinson, Kluwer, R.P.G. Academic Publisher 2003
- Aircraft Systems, Mechanical, electrical, and avionics subsystems integration, 3. Auflage: Ian Moir, Allan Seabridge, Wiley 2011
- Aviation History magazine: William Scheck, Aviation History magazine 2003, veröffentlicht online 2007, übersetzt aus dem Englischen
- Autopilot Systems, An Investigation of the C4I Methodologies Used in Autopilot Systems: Matthew C. Posid (2007)
- K. H. Kunze: Ein Roboter als Flugzeugpilot. In: Reclams Universum 51 (1934/35), Heft 14 vom 3. Januar 1935, S. 491–492 (mit 4 Abb.)
- Radioübertragung England 1947, History.com (Memento vom 18. Januar 2015 im Internet Archive)
- Flight and Aircraft Engineer No 2024 Vol LII, Ausgabe vom 9. Okt. 1947: G. Geoffrey Smith, London, übersetzt aus dem englischen, PDF
- Gerald Taufretter: Die Ohnmacht der Piloten. In: Der Spiegel. Nr. 31, 2009, S. 106–118 (online – 27. Juli 2009).
- Civil Avionics System: Ian Moir, Allan Seabridge, Professional Eng. Publishing UK 2003, S. 273.
- Principles of Avionics Avionics Communications 3. Auflage: Albert Helfrick, 2004
- Technologie des Flugzeuges, 5. Auflage: Klaus Engmann, Vogel-Verlag 2005
- Instrument Flying Handbook: FAA, Federal Aviation Administration, US Dep. of Transportation. 2012 (übersetzt aus dem Englischen)
- D. Briere, P. Traverse: Airbus A320/A330/A340 electrical flight controls – A family of fault-tolerant systems. In: IEEE (Hrsg.): FTCS-23 The Twenty-Third International Symposium on Fault-Tolerant Computing. 1993, ISSN 0731-3071, doi:10.1109/FTCS.1993.627364 (englisch, ieee.org).
- siehe auch englische Wikipedia