Ursprungsebene
Eine Ursprungsebene ist in der Mathematik eine Ebene, die den Koordinatenursprung enthält. Wichtige Ursprungsebenen sind die drei Koordinatenebenen in einem kartesischen Koordinatensystem. Ursprungsebenen weisen besonders kompakte Darstellungen als Ebenengleichung auf und zeichnen sich durch vergleichsweise einfache Formeln zur Schnitt- und Abstandsberechnung aus. Die Menge der Vektoren, die in einer Ursprungsebene liegen, bildet einen zweidimensionalen Untervektorraum des dreidimensionalen euklidischen Raums.
Definition
In der analytischen Geometrie wird eine Ebene als Teilmenge der Punkte des dreidimensionalen Raums aufgefasst, wobei jeder Punkt durch seine Koordinaten dargestellt wird. Eine Ursprungsebene ist nun dadurch ausgezeichnet, dass sie durch den Koordinatenursprung des gewählten kartesischen Koordinatensystems verläuft. In Koordinatenform wird eine Ursprungsebene dann durch die Ebenengleichung



beschrieben, wobei und reelle Parameter sind, die nicht alle gleich null sein dürfen.


Vektordarstellung
Ursprungsebenen können auch durch Vektorgleichungen dargestellt werden, wobei jeder Punkt der Ebene durch seinen Ortsvektor dargestellt wird. In Parameterform wird eine Ursprungsebene dann durch die Gleichung

- mit


beschrieben, wobei und zwei linear unabhängige Vektoren der Ebene sind. Eine Ursprungsebene besteht damit aus denjenigen Punkten, deren Ortsvektoren als Linearkombination zweier gegebener Vektoren geschrieben werden können. In Normalenform wird eine Ursprungsebene durch die Normalengleichung



charakterisiert, wobei ein Normalenvektor der Ebene ist und das Skalarprodukt der beiden Vektoren und darstellt. Eine Ursprungsebene besteht damit aus denjenigen Punkten, deren Ortsvektoren senkrecht auf einem gegebenen Vektor stehen.[1] Ist eine Ursprungsebene in Parameterform gegeben, so kann ein Normalenvektor der Ebene durch das Kreuzprodukt berechnet werden.




Beispiele
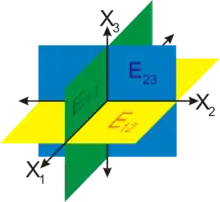
Wichtige Beispiele für Ursprungsebenen sind die drei Koordinatenebenen
- bzw. bzw.
- bzw. bzw.
- bzw. bzw.









Hierbei sind , und die drei Einheitsvektoren.



Eigenschaften
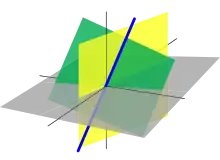
Schnitt
Der Schnitt zweier verschiedener Ursprungsebenen ergibt immer eine Ursprungsgerade, das heißt eine Gerade mit der Geradengleichung
- mit ,


wobei ein Richtungsvektor der Gerade ist. Besitzen die beiden Ursprungsebenen die Normalenvektoren und , dann ergibt sich ein Richtungsvektor der Schnittgerade als das Kreuzprodukt



der beiden Normalenvektoren. Der Schnitt dreier Ursprungsebenen ergibt genau dann den Koordinatenursprung, wenn ihre Normalenvektoren linear unabhängig sind. Dabei sind drei Vektoren im Raum genau dann linear unabhängig, wenn sie nicht in der gleichen Ursprungsebene liegen.[2]
Abstand eines Punkts
Der Abstand eines Punkts mit Ortsvektor von einer Ursprungsebene mit Normalenvektor beträgt

- ,

wobei die Länge (euklidische Norm) von ist. Dieser Abstand entspricht gerade der Länge der Lotstrecke zwischen dem Punkt und der Ebene. Der Ortsvektor des Lotfußpunkts ist dann die Orthogonalprojektion von auf die Ursprungsebene und somit durch



gegeben.
Spiegelung eines Punkts
Man erhält die Spiegelung eines Punkts mit Ortsvektor an einer Ursprungsebene, indem man den Lotvektor von dem Punkt auf die Ebene verdoppelt. Der bezüglich einer Ursprungsebene gespiegelte Vektor eines Vektors ist damit durch



gegeben, wobei wieder ein Normalenvektor der Ebene ist.
Vektorraumstruktur
Die Menge der Vektoren des dreidimensionalen Raums bildet einen Vektorraum, den euklidischen Raum. Die Menge der Vektoren, die in einer Ursprungsebene liegen, bildet dabei einen Untervektorraum des euklidischen Raums
- .

Dieser Untervektorraum ist gerade die lineare Hülle der beiden die Ursprungsebene aufspannenden Vektoren und , beziehungsweise der Orthogonalraum der linearen Hülle eines Normalenvektors der Ebene. Die Ursprungsebenen sind dabei die einzigen zweidimensionalen Untervektorräume des euklidischen Raums.[3]
Zu jeder Ebene , die nicht den Ursprung enthält, existiert genau eine parallele Ursprungsebene . Jede Ebene kann damit als affiner Unterraum des euklidischen Raums der Form


dargestellt werden, wobei der Ortsvektor eines Punkts von ist.

Verallgemeinerungen
Allgemeiner können Ebenen auch in höherdimensionalen Räumen betrachtet werden. Eine Ursprungsebene ist dann ein zweidimensionaler Untervektorraum des . In Parameterform ist eine solche Ursprungsebene wie in drei Dimensionen durch

- mit
gegeben, wobei zwei linear unabhängige Vektoren sind. Die entsprechende Normalenform

mit definiert allerdings für keine Ebene mehr, sondern eine Hyperebene der Dimension , die den Ursprung enthält.



Siehe auch
Literatur
- Kenneth Eriksson, Donald Estep, Claes Johnson: Angewandte Mathematik: Body and Soul 1. Springer, 2006, ISBN 3-540-35006-3.
- Mike Scherfner, Torsten Volland: Mathematik für das erste Semester. Springer, 2012, ISBN 3-8274-2505-0.
Einzelnachweise
- Eriksson, Estep, Johnson: Angewandte Mathematik: Body and Soul 1. Springer, 2006, S. 351.
- Scherfner, Volland: Mathematik für das erste Semester. Springer, 2012, S. 247.
- Eriksson, Estep, Johnson: Angewandte Mathematik: Body and Soul 1. Springer, 2006, S. 357.