Punktwolke
Eine Punktwolke oder ein Punkthaufen (englisch point cloud) ist eine Menge von Punkten eines Vektorraums, die eine unorganisierte räumliche Struktur („Wolke“) aufweist.[1] Eine Punktwolke ist durch die enthaltenen Punkte beschrieben, die jeweils durch ihre Raumkoordinaten erfasst sind. Punktwolken mit Georeferenzierung enthalten Punkte in einem erdbezogenen Koordinatensystem. Zu den Punkten können zusätzlich Attribute, wie z. B. geometrische Normalen, Farbwerte, Aufnahmezeitpunkt oder Messgenauigkeit, erfasst sein.
Erzeugung

Die Erzeugung kann grundsätzlich über Scanning-Verfahren (z. B. terrestrisches oder flugzeuggestütztes Laserscanning) oder photogrammetrische Verfahren[2] erfolgen sowie allgemein mittels Abtastung von Objektoberflächen durch Systeme wie Koordinatenmessmaschinen oder tastende 3D-Scanner. Optische Scanner untergliedert man in Lasertechnologie, die nach dem Triangulationsprinzip arbeiten, und Normallicht-Scanner, die nach dem Streifenlichtverfahren („coded-light“) arbeiten. Einen zusammenfassenden Überblick über die Vielfalt und Leistungsfähigkeit aktueller optischer Scanning-Methoden und die Weiterverarbeitung der resultierenden 3D-Daten/Punktwolke gibt beispielsweise C. Teutsch.[3] Durch die mehrfache Erfassung eines räumlichen Ausschnitts zu unterschiedlichen Zeitpunkten lässt sich ein vierdimensionales (zeitvariantes) diskretes räumliches Modell einer Umgebung aufbauen.[4] Jeder Punkt der Wolke wird dabei zeitlich und räumlich (XYZ-Koordinaten) lokalisiert und kann in weiterer Folge auch georeferenziert werden.[5]
Speicherung
Aufgrund des enormen Datenvolumens stellen sich Herausforderungen an die Speicherung hinsichtlich des Speicherplatzes und des effizienten Zugriffs auf einzelne Bereiche einer Punktwolke. Zur Implementierung von Speicherverfahren kommen Multiresolutionsdatenstrukturen zum Einsatz: „Um die Daten effizient verarbeiten und in Echtzeit visualisieren zu können, werden in Software-Implementierungen Out-of-Core-Algorithmen und Level-of-Detail-Strukturen benötigt.“[6][7] Bekannte Umsetzungen erfolgen in Form von Octrees.[8] Derzeit wird versucht, die Datenspeicherung von 3D-Punktwolken zu standardisieren, um ein Datenmanagement zu ermöglichen, das mit anderen Disziplinen kompatibel ist. Neben der Kompatibilität sollen dadurch die großen Datenmengen leichter zu verwalten sein, und interaktive Forschungsansätze leichter ermöglicht bzw. dadurch gefördert werden.[9]
Visualisierung
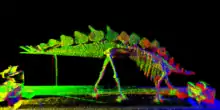
Zur Visualisierung massiver Punktwolken sind Out-of-Core-Algorithmen erforderlich, die einen effizienten, auflösungsabhängigen Zugriff des 3D-Renderingsystems auf Punkte einer Punktwolke erlauben.[10][11] Insbesondere Point-based Rendering ermöglicht eine differenzierte grafische Darstellung von Punktwolken, z. B. in für Punkte unterschiedlicher Kategorie (z. B. Fassadenpunkte, Dachpunkte, Vegetationspunkte etc.).[12] Aus Punktwolken mit ausreichend hoher Punktdichte können über 3D-Renderingverfahren kontinuierliche Oberflächen abgeleitet werden, um so eine möglichst geschlossene Visualisierung von Oberflächenbereichen zu erzielen.[13]
Es gibt viele Möglichkeiten um aus einer Punktwolke eine geschlossene 3D-Oberfläche zu erstellen. Einige Herangehensweisen, wie Delaunay-Triangulation, alpha shapes oder ball pivoting, bauen ein Netzwerk von Dreiecken über die Normalvektoren der einzelnen Punkte auf. Andere Herangehensweisen, wie z. B. der Marching-Cubes-Algorithmus, extrahieren ein Polygonnetz über Voxel-basierte Ansätze.[14] Diese spielen vor allem für bildgebende Verfahren in der Medizin eine Rolle. Zu den aktuell bekanntesten open Source Visualisierungsprogrammen für 3D-Punktwolken zählen CloudCompare und MeshLab. Jedoch sind diese Anwendungen in gewissen Bereichen limitiert. Zwar können beide Programme Punktwolken darstellen und erleichtern so den Austausch und die Kommunikation über 3D-Daten, eine Bearbeitung der Punktwolke ist jedoch nur beschränkt möglich. Hinzu kommt, dass die zu verarbeitende Datenmenge für beide Programme limitiert ist.[15]
Seit 2011 ist die freie Programmbibliothek der Point Cloud Library (PCL) verfügbar. Diese bietet zahlreiche Algorithmen zur Verarbeitung n-dimensionaler Punktwolken und dreidimensionaler Geometrien. Die darin enthaltenen Module ermöglichen z. B. die Filterung, Registrierung, Segmentierung, Oberflächenrekonstruktion oder Visualisierung.[16] Die PCL hat für die 3D-Bildverarbeitung einen ähnlichen Status wie OpenCV für die 2D-Bildverarbeitung.
Verwendung
Geomorphologie
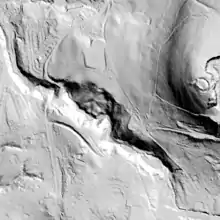
Für geomorphologischen Analysen werden vor allem digitale Höhenmodelle von 3D-Punktwolken abgeleitet. Dadurch werden eine Vielzahl von oberflächenbezogenen Analysen ermöglicht.[17] Bodenerosionsprozesse wurden mittels terrestrischer Laserscanner untersucht.[18] Um den Bodenabtrag zu quantifizieren wurden 3D-Punktwolken zu unterschiedlichen Zeitpunkten gemessen und miteinander verglichen. Dadurch lassen sich Aussagen darüber treffen, von wo Sedimente abgetragen werden bzw. wie diese in weiterer Folge verlagert werden. Im Bereich der Glaziologie werden mittels Punktwolken die Bewegungen und Veränderungen von Gletschern dokumentiert und untersucht.[19] Darüber hinaus beschäftigen sich eine Reihe von fluvialen Forschungsansätzen bzw. Anwendungen mit der Analyse von Punktwolken. So können Veränderungen von Flussläufen über größere Zeiträume beobachtet werden.[20]
Archäologie
Viele Entwicklungen von Anwendungen rund um 3D-Punktwolken stammen aus dem Bereich der Archäologie. Durch die Analyse von Oberflächenformen wird dabei auf vergangene Siedlungsstrukturen geschlossen. Dadurch können anthropogen genutzte Flächen erkannt werden und deren Anordnung und Organisation analysiert werden. Punktwolken ermöglichen es in diesem Zusammenhang, dass einerseits die Erdoberfläche visualisiert wird um so Archäologen die Möglichkeit zu bieten gezielt nach bestimmten Strukturen und deren Lage zu suchen, und andererseits bietet sich die Möglichkeit durch automatisierte Abläufe systematisch größere Flächen nach vorab definierten Mustern zu scannen.[21] Eine weitere Einsatzmöglichkeit von 3D-Punktwolken in der Archäologie stellt die Modellierung von historischen Stätten dar.[22]
Agrar- und Forstwirtschaft
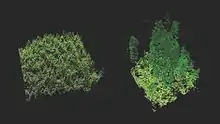
In der Agrar- und Forstwirtschaft werden 3D-Punktwolken vor allem für Monitoring-Anwendungen herangezogen. Durch die Verwendung von LiDAR-Daten wird es möglich, großräumig agrarisch genutzte Flächen zu überwachen, ohne dabei direkt vor Ort sein zu müssen. Dadurch wird verhindert, dass durch die Präsenz des Menschen die Nutzpflanzen und deren Umgebung gestört oder zerstört wird. Darüber hinaus kann der Arbeitsaufwand deutlich vermindert werden, da die Agrarflächen großräumig überwacht werden und gezielt Einfluss genommen werden kann.[23][24] Besonders im Bereich des Precision Farmings kommen punktwolkenbasierte Verfahren zum Einsatz. Hierbei können Aussagen über das Pflanzenwachstum durch die Analyse von aufgenommenen 3D-Punktwolken getroffen werden.[25] Ziel der Analyse ist es, Bereiche einer landwirtschaftlichen Nutzfläche auszumachen, die besondere Wachstumsmuster zeigen, um diese in weiterer Folge dann individuell düngen zu können. Im Bereich der Forstwirtschaft wird z. B. der Zusammenhang zwischen Baumgesundheit und Borkenkäferbefall untersucht.[26] Aus den 3D-Puntwolkendaten können Unterschiede in den Baumkronenstrukturen bei gesunden bzw. befallenen Bäumen abgeleitet werden. Auf diese Weise werden gezielt befallene Bäume ausgemacht und in weiterer Folge behandelt.
Bauwirtschaft
Drohnen ermöglichen es, angelieferte Baustoff wie Kies fotograpisch zu vermessen. Mittels eines Algorithmus und der Punktwolken-Auswertung wird das angelieferte Volumen bestimmt. Muss ein Areal ausgefüllt werden, kann man das benötigte Auffüllmaterial bestimmen.
Stadtgeographie

Im Bereich städtebaulicher und raumplanerischer Prozesse kommen Laserscanning-Daten verstärkt zum Einsatz. Mittels Computeralgorithmen ist es möglich, 3D-Punktwolken eines Areales in unterschiedliche Bereiche zu segmentieren. So kann zwischen Vegetation, Gebäuden und unbebauten Flächen unterschieden werden.[27] Informationen aus solchen Analysen können in weiterer Folge bei stadtplanerischen Entscheidungen berücksichtigt werden. Die einzelnen Bereiche werden dabei aufgrund der Anordnung der gescannten Punkte innerhalb der Wolke erkannt. Erfasste Baumkronen zeichnen sich beispielsweise durch eine unregelmäßige Anordnung der Punkte aus, wohingegen Gebäude deutliche lineare Strukturen aufweisen.[28] Ein weiterer Algorithmus der regelmäßige Bereiche innerhalb einer Punktwolke filtert wurde dafür entwickelt, potentielle Standorte für Photovoltaikanlagen auszuweisen.[29] Darüber hinaus ermöglichen Punktwolken detaillierte 3D-Modelle eines Stadtgebietes zu erzeugen.[24] Um bauliche Veränderungen innerhalb eines Stadtgebietes erfassen zu können, werden Punktwolken zu unterschiedlichen Zeitpunkten erfasst und die Punktabstände zwischen den einzelnen Erhebungen verglichen.[30]
Naturgefahren
Im Naturgefahren- und Risikomanagement ermöglichen 3D-Punktwolken eine detaillierte Analyse von Naturereignissen sowie eine gezielte Überwachung von potentiellen Gefahrenbereichen. Dadurch wird die Optimierung von Frühwarnsystemen ermöglicht. Gravitative Massenbewegungen werden mittels Zeitreihen von 3D-Punktwolken überwacht um so Dynamiken frühzeitig zu erkennen und betroffene Personen warnen zu können.[31] In steinschlaggefährdeten Gebieten können Bereiche mit Infrastruktur durch regelmäßiges Scanning und durch die Analyse der daraus generierten 3D-Punktwolken wichtige Informationen für lokales Risikomanagement gewonnen werden.[32] Die Rauigkeit einer Oberfläche ist in der Analyse von Naturgefahren ein wichtiger Parameter. Anhand von 3D-Punktwolken lassen sich Aussagen über die Struktur von Oberflächen treffen. Dadurch wird es möglich, aufgrund der Bodenbeschaffenheit und deren potentielle Eigenschaften, Rückschlüsse auf mögliche Naturgefahren, wie etwa Hochwasser, Steinschlag oder Lawinen zu ziehen.[33] Für Risikomanagementmaßnahmen ist es wichtig, das genaue Ausmaß des Ereignisses zu kennen, um richtig, rechtzeitig und ausreichend mit der Umsetzung von Schutzmaßnahmen zu reagieren. Die Gewinnung von 3D-Punktwolken durch Airborne Laserscanning hat im Vergleich zu traditionellen Methoden der Fernerkundung (z. B. Photogrammetrie) den Vorteil, dass durch das aktive Messsystem Vegetation durchdrungen werden kann und somit Bodenpunkte aufgezeichnet werden.[34]
Computergrafik
Eine Punktwolke wird verwendet:
- zur Visualisierung, um gescannte Objekte und Flächen am Computer darzustellen;
- zur Modellierung; dabei wird die ursprüngliche, (meist) geschlossene Oberfläche mittels Oberflächenrekonstruktion wiederhergestellt. Die dabei entstehenden Oberflächen bestehen meist aus Polygonen (siehe auch Meshing);
- als Grundlage für geometrische Berechnungen, z. B. zum Vermessen von Menschen (Bodyscanning) oder Gegenständen;
- zum Identifizieren von Menschen oder Gegenständen.
- in der Medizin (besonders Forensik, Kriminalistik); um ein Oberflächenmodell zu erzeugen um Verletzungen zu dokumentieren und um diese zu rekonstruieren. Eine weiterführende Methode ist die Kombination von Laserscanning und radiologischen Verfahren. Somit kann ein virtuelles 3D-Modell eines Körpers erstellt werden. In diesem Modell werden alle Verletzungen (innere und äußere) sichtbar.[35][36]
Karosseriebau
Im Bereich CAD werden Punktwolken verwendet, um eingescannte Designobjekte in das CAD-System einzulesen. Bei anspruchsvollen Formen (z. B. Automobilkarosserie) wird nicht selten ein maßstabsgetreues Lehmmodell (clay model) erstellt. Mit Ziehmesser und anderen Handwerkzeugen werden die Formen aus einer Modelliermasse erstellt und danach eingescannt. Bei symmetrischen Bauteilen (z. B. Motorhaube) wird dabei nur eine Seite modelliert. Diese wird dann mit taktilen, messenden oder optischen Scannern eingescannt. Die dabei entstehende 3D-Geometrie besteht zuerst nur aus Punkten im Raum (XYZ-Koordinaten). Diese Punktwolke wird entweder in einer speziellen Software zur Flächenrückführung eingelesen oder in einigen Fällen auch direkt in die CAD-Software eingelesen. Die oft übliche Umwandlung von Punkten zu einfachen Oberflächennetzen, wie sie bei Computerspielen meist ausreichend ist, genügt im Automobilbau nicht. Hier werden de Polygonnetze durch Bézier- und NURBS-Flächen angenähert und dabei mit Filtermethoden mögliche Messfehler ausgeglichen. Die so entstandenen Flächen können mittels geschickter Anordnung auch an den Rändern mehrfach differenzierbar sein, was eine Voraussetzung für weiche Übergänge, auch in der Spiegelung, ist. Das aus dem Lehmmodell entstandene CAD-Modell kann dadurch im CAD gespiegelt werden. Es liegt dann ein mathematisch exakt beschriebenes Modell einer Autokarosserie (oder Teile davon) vor.
Punktwolken in der Statistik
In der Statistik und explorativen Datenanalyse werden Punktwolken zur grafischen Darstellung bivariater Zusammenhänge verwendet (vgl. Streudiagramm, Korrelation). Sie erlauben es, einen einfachen optischen Eindruck von Richtung und Enge des Zusammenhangs zu gewinnen und Ausreißer im Datensatz aufzuspüren. Bereiche einer Punktwolke, welche dichter sind als andere werden als Cluster bezeichnet.
Einzelnachweise
- J. Otepka, S. Ghuffar, C. Waldhauser, R. Hochreiter, N. Pfeifer: Georeferenced Point Clouds: A Survey of Features and Point Cloud Management. In: ISPRS Int. J. Geo-Inf. 2, 2013, S. 1038–1065. doi:10.3390/ijgi2041038
- F. Leberl, A. Irschara, T. Pock, P. Meixner, M. Gruber, S. Scholz, A. Wiechert: Point clouds: Lidar versus 3D vision. In: Photogramm. Eng. Remote Sens. 76, 2010, S. 1123–1134.
- C. Teutsch: Model-based Analysis and Evaluation of Point Sets from Optical 3D Laser Scanners. (= Magdeburger Schriften zur Visualisierung. Band 1). Shaker Verlag, 2007, ISBN 978-3-8322-6775-9.
- R. Richter, J. Döllner: Potentiale von massiven 3D Punktwolkendatenströmen. (Geoinformatik 2012 – „Mobilität und Umwelt“). Shaker Verlag, 2012, S. 215–222.
- Jochem Andreas, Bernhard Höfle, Martin Rutzinger: Extraction of Vertical Walls from Mobile Laser Scanning Data for Solar Potential Assessment. In: Remote Sensing. 3, 4, Dezember 2011, S. 650–667.
- R. Richter, J. Döllner: Integrierte Echtzeit-Visualisierung von massiven 3D-Punktwolken und georeferenzierten Texturdaten. In: Photogrammetrie Fernerkundung Geoinformation. (PFG), vol. 2011, no. 3, 2011, S. 145–154.
- P. Goswami, F. Erol, R. Mukhi, R. Pajarola, E. Gobbetti: An Efficient Multi-resolution Framework for High Quality Interactive Rendering of Massive Point Clouds using Multi-way kd-Trees. In: The Visual Computer. 29, 1, 2013, S. 69–83.
- J. Elseberg, D. Borrmann, A. Nüchter: One billion points in the cloud – an octree for efficient processing of 3D laser scans. In: ISPRS Journal of Photogrammetry and Remote Sensing. Februar 2013.
- P. van Oosteroma, O. Martinez-Rubib, M. Ivanovab, M. Horhammerc, D. Geringerc, S. Ravadac, T. Tijssena, M. Kodded, R. Gonçalves: Massive point cloud data management: Design, implementation and execution of a point cloud benchmark. In: Computers & Graphics. 49, 2015, S. 92–125.
- M. Wimmer, C. Scheiblauer: Instant points: Fast rendering of unprocessed point clouds. In: Proceedings Symposium on Point-Based Graphics 2006. 2006, S. 129–136.
- R. Richter, J. Döllner: Out-of-Core Real-Time Visualization of Massive 3D Point Clouds. 7th International Conference on Virtual Reality, Computer Graphics, Visualisation and Interaction in Africa, 2010, S. 121–128.
- R. Richter, M. Behrens, J. Döllner: Object class segmentation of massive 3D point clouds of urban areas using point cloud topology. In: International Journal of Remote Sensing. vol. 34, no. 23, 2013, S. 8394–8410.
- R. Pintus, E. Gobbetti, M. Agus: Real-time Rendering of Massive Unstructured Raw Point Clouds using Screen-space Operators. In: The 12th International Symposium on Virtual Reality, Archaeology and Cultural Heritage. Oktober 2011, S. 105–112.
- Paolo Cignoni: Meshing Point Clouds. 7. September 2009, abgerufen am 19. Februar 2017 (englisch).
- A. Palha, A. Murtiyoso, J.-C. Michelin, E. Alby, P. Grussenmeyer: Open Source First Person View 3D Point Cloud Visualizer for Large Data Sets. In: I. Ivan, A. Singleton, J. Horák, T. Inspektor (Hrsg.): The Rise of Big Spatial Data. Springer International, Cham 2017, S. 27–39.
- Point Cloud Library (PCL). Abgerufen am 2. März 2017 (englisch).
- M. Rutzinger, B. Höfle, M. Vetter, N. Pfeifer: Digital Terrain Models from Airborne Laser Scanning for the Automatic Extraction of Natural and Anthropogenic Linear Structures. In: Mike J. Smith, Paolo Paron, James S. Griffiths: Geomorphological Mapping: a professional handbook of techniques and applications. Elsevier, Oxford 2011, S. 475–488.
- A. D. Meijer, J. L. Heitman, J. G. White, R. E. Austin: Measuring erosion in long-term tillage plots using ground-based lidar. In: Soil & Tillage Research. 126, 2016, S. 1–10.
- N. Micheletti, M. Tonini, S. N. Lane: Geomorphological activity at a rock glacier front detected with a 3D density-based clustering algorithm. In: Geomorphology. 278, 2017, S. 287–297.
- S. Ghosh: Hydrological changes and their impact on fluvial environment of the lower damodar basin over a period of fifty years of damming The Mighty Damodar River in Eastern India. In: Procedia - Social and Behavioral Sciences. 19, 2011, S. 511–519.
- D. White, K. A. Corcoran: Geospatial Applications in Archaeology. In: International Encyclopedia of the Social & Behavioral Sciences. 2, 2015, S. 97–103.
- J. A. B. López, G. A. Jiménez, M. S. Romero, E. A. García, S. F. Martín, A. L. Medina, J. A. E. Guerrero: 3D modelling in archaeology: The application of Structure from Motion methods to the study of the megalithic necropolis of Panoria (Granada, Spain). In: Journal of Archaeological Science. 10, 2016, S. 495–506.
- B. Höfle: Radiometric Correction of Terrestrial LiDAR Point Cloud Data for Individual Maize Plant Detection. 2014, S. 94–98.
- G. Vosselman, H. G. Maas: Airborne and Terrestrial Laser Scanning. Whittles Publishing. Twente 2010.
- K. König, B. Höfla, M. Hämmerle, T. Jarmer, B. Sigmann, H. Lilienthal: Comparative classification analysis of post-harvest growth detection from terrestrial LiDAR point clouds in precision agriculture. In: ISPRS Journal of Photogrammetry and Remote Sensing. 104, 2015, S. 112–125.
- F. E. Fassnacht, H. Latifi, A. Ghosh, P. K. Joshi, B. Koch: Assessing the potential of hyperspectral imagery to map bark beetle-induced tree mortality. In: Remote Sensing of Environment. 140, 2014, S. 533–548.
- Q. Y. Zhou, U. Neumann: Complete residential urban area reconstruction from dense aerial LiDAR point clouds. In: Graphical Models. 75, 2013, S. 118–125.
- B. Höfle, M. Hollaus, J. Hagenauer: Urban vegetation detection using radiometrically calibrated small-footprint full-waveform airborne LiDAR data. In: ISPRS Journal of Photogrammetry and Remote Sensing. 67, 2012, S. 134–147.
- A. Jochem, B. Höfle, M. Rutzinger, N. Pfeifer: Automatic Roof Plane Detection and Analysis in Airborne Lidar Point Clouds for Solar Potential Assessment. In: Sensors. 7, 2009, S. 5241–5262.
- R. Richter, J. Kyprianidis, J. Döllner: Out-of-Core GPU-based Change Detection in Massive 3D Point Clouds. In: Transactions in GIS. 17, 2013, S. 724–741.
- J. Travelletti, J. P. Malet, C. Delacourt: Image-based correlation of Laser Scanning point cloud time series for landslide monitoring. In: International Journal of Applied Earth Observation and Geoinformation. 32, 2014, S. 1–18.
- R. A. Kromer, D. J. Hutchinson, M. J. Lato, D. Gauthier, T. Edwards: Identifying rock slope failure precursors using LiDAR for transportation corridor hazard management. In: Engineering Geology. 195, 2015, S. 93–103.
- M. Hollaus, C. Aubrecht, B. Höfle, K. Steinocher, W. Wagner: Roughness Mapping on Various Vertical Scales Based on Full-Waveform Airborne Laser Scanning Data. In: Remote Sensing. 3, 2011, S. 503–523.
- R. Malinowski, B. Höfle, K. Koenig, G. Groom, W. Schwanghart, G. Heckrath: Local-scale flood mapping on vegetated floodplains from radiometrically calibrated airborne LiDAR data. In: ISPRS Journal of Photogrammetry and Remote Sensing. 119, September 2016, S. 267–279.
- Ursula Buck: Digitale Photogrammetrie und Laserscanning in der Forensik. (PDF) Hochschule für Technik Stuttgart, 2006, abgerufen am 24. Februar 2017.
- Ursula Buck: Laserscanning in der Kriminalistik. In: Zeitschrift für Geodasie, Geoinformation und Landmanagement. Band 135, Nr. 3, 2010, S. 190–198.